CopyrightⒸ2014 KSAE / 133-06 pISSN 1225-6382 / eISSN 2234-0149 DOI http://dx.doi.org/10.7467/KSAE.2014.22.7.040 Transactions of KSAE, Vol. 22, No. 7, pp.40-47 (2014)
영상을 이용한 주행차량 위치정보와 GIS 차선 데이터 매칭 기법
김 민 우1)․문 상 찬1)․주 다 니1)․이 순 걸*2)
경희대학교 대학원 기계공학과1)․경희대학교 기계공학과2)
Matching GIS Lane Data with Vehicle Position Using Camera Image
Min-Woo Kim1)․Sang-Chan Moon1)․Da-Ni Joo1)․Soon-Geul Lee*2)
1)Department of Mechanical Engineering, Graduate School, KyungHee University, Gyeonggi 446-701, Korea
2)Department of Mechanical Engineering, KyungHee University, Gyeonggi 446-701, Korea (Received 5 February 2014 / Revised 26 June 2014 / Accepted 21 July 2014)
Abstract : This paper proposes a matching method of GIS lane information with a vehicle position using camera image to reduce DGPS error. Images of straight road are taken using a camera that is installed on the front center of the vehicle, and the distance between the vehicle and the lane are estimated using the images. The current GIS lane data is matched by comparing the estimated distance and the measured distance using a DGPS. Inverse perspective mapping is used to minimize the error of image processing from the heading angle, and single buffering method is applied to decide the exact moment of GIS match. Through practical test on the highway, feasibility of the GIS matching using camera image is confirmed.
Key words : Geographic information system(지리 정보 시스템), Matching system(매칭 시스템), DGPS(정밀측위), Lane departure warning system(차선 이탈 경보 시스템), Intelligent transport systems(지능형 교통 시스템)
1. 서 론1)
일반지도 및 지형정보를 인공위성을 통해 수집하 여 분석할 수 있도록 복합적인 지리정보시스템 (GIS, Geographic Information System)은 국토계획 및 도시계획, 수자원관리, 상하수도, 통신, 교통망, 전 력망, 도시가스, 도로 등 광범위한 분야에 활용되고 있다.1) 특히 차량용 내비게이션 시스템이 대중화되 고, 지능형 교통시스템(ITS, Intelligent Transportation Systems) 연구가 활발히 진행됨에 따라 GIS 도로정 보의 중요성이 강조되고 있다.
미국의 경우 GIS 도로정보를 활용하여 교통관리 시스템, 차량관제시스템, 교통정보 서비스시스템 등의 많은 ITS가 활용되고 있으며,2) 최단경로 제공, 자동운전 시스템, 전국도로 전자지도화, 능동안전
*Corresponding author, E-mail: [email protected]
시스템 등의 연구개발이 활발히 진행되고 있다.
차선이탈 경고장치, 맹점 경고 장치, 긴급 브레이 킹 시스템, 교차로 충돌경고, 커브 속도 컨트롤러 등 의 첨단 교통 시스템의 경우 차선수준의 높은 정밀 도의 GIS 도로정보가 요구된다.3) 특히 능동안전시 스템중 하나인 차선이탈 경고장치(LDWS, Lane De- parture Warning System)는 기존 영상기반의 LDWS 를 보완하기 위해 DGPS와 정밀 GIS 차선정보 기반 의 LDWS 연구가 진행 중이다.4)
그러나 위성에서 보내는 신호를 통하여 위치를 계산하는 GPS의 특성으로 인하여, 수신위성 개수와 위치, 통신시스템, 날씨, 온도, 습도, 대기상태에 의 한 오차가 발생하기 때문에,5) 정밀한 GIS 차선정보 의 수집 및 갱신이 어렵고, 측위시점의 환경조건에 따라 GIS 차선정보의 오차가 발생한다. 또한, 터널 및 고층건물 밀집 지역과 같은 음영지역의 경우
영상을 이용한 주행차량 위치정보와 GIS 차선 데이터 매칭 기법
GPS 활용이 불가능하다. 환경요건에 따른 정밀한 GIS 차선정보 및 차량위치정보 획득을 위하여 항공 사진, 위성시계 오차 추정치를 이용한 측위 방법, RFID 또는 영상을 활용한 방법 등이 연구되고 있 다.6-9) 그러나 이 같은 부수적인 방법들은 신호처리 에 따른 지연 및 추가비용 소요 문제로 인해 적용에 어려움이 있다. 따라서 차량의 위치정보와 GIS 차선 정보의 정확한 위치정보 매치에 어려움이 있으며, 과거에 구축된 GIS 차선정보를 그대로 사용할 경우 시스템 오작동의 요인이 되어, 효율성이 낮아지게 된다.
본 연구에서는 GIS 차선정보가 있는 고속도로에 서 주행차량의 측정된 DGPS 정보에 맞추어 GIS 차 선정보를 간단히 보정함으로써 차량의 새로운 도로 내 위치정보를 생성하고, 차선기준 절대 위치정보 로써 활용하는데 목적을 둔다. 이를 위해 주행차량 의 영상정보를 이용한 GIS 차선정보 매칭 방법이 사 용되었다. 영상정보를 이용하여 차량과 차선과의 간격을 추정하고 차량에 설치된 DGPS 위치정보와 의 비교를 통해 GIS 차선정보를 보정할 수 있다. 이 는 GIS 차선정보를 주기적으로 갱신하지 않고 차량 내에서 직접 GIS 차선정보를 보정 처리하는 방법으 로 저비용 고효율의 효과가 있을 것으로 예측된다.
실차실험으로 GIS 차선정보 보정을 통해 매칭된 차 선도로 내 차량의 위치정보를 확인하였다.
2. GIS 차선정보 획득 2.1 DGPS 좌표 변환
DGPS를 이용하여 측정된 GIS 차선 위도, 경도 정 보를 시스템에 적용하기 위해서는 X, Y의 2차원 평 면 직교좌표계 변환이 필요하다. 이를 위해 가우스 크뤼게 투영법을 이용한 TM 투영식을 적용하였다.4) TM 투영식을 적용하여 경위도 좌표를 X, Y 좌표 로 변환하기 위해서는 변환식에 맞는 기준값이 필 요하다. 우리나라의 중부원점인 위도 38도, 경도 127도를 X축 500,000 m, Y축 200,000 m로 환산하여 적용하였다. 식 (1)은 측정좌표값 원점투영을 위한 것이며, X, Y 변환식에 적용된다.
cos (1)
여기서 와 는 각각 측정 위도 및 경도 좌표이며,
는 중부원점 기준 경도 좌표이다.
가우스 크뤼게 투영법은 회전타원체 좌표계에서 평면으로 직접 투영하며, X, Y 변환 식은 각각 아래 식 (2)와 (3) 같이 구해진다.
∆ tan
′
∆
′
여기서 tan,
이고, 은 제 1 이심률, ′은 제 2이심률, 는 타원체의 장반경,
는 타원체의 단반경이고 는 타원체 편 평률로써 WGS84 타원체로 적용된다. 위도에 따른 모유선의 곡률반경을 나타내는 식은 (4)와 같다.
sin
(4)
2.2 GIS 차선정보 획득
고속도로에서 차선별로 GIS 정보를 수집할 경우 많은 인력, 시간, 비용이 발생하게 된다. 따라서 효율 적인 GIS 차선정보 수집을 위하여 한 개 차선 위의 2 개 지점의 GIS 정보를 수집하여, 차선폭에 따라 차 선별 GIS 정보를 생성하였다. 우리나라의 경우 고속 도로 차선폭이 3.5 m 로 규정되어 있으므로, 곡률반 경이 큰 고속도로의 경우 한 개 차선의 GIS 정보를 획득함으로써 전 차선의 GIS정보 생성이 가능하다.
DGPS를 통해 고속도로를 직선화된 구간으로 나 눌 수 있다. 구분된 직선화 구간에 대해 2차선 도로 중앙차선의 시작점과 끝점의 위경도 좌표를 획득하 고, TM투영식을 이용하여 평면 X, Y 좌표로 변환한 다. 변환된 직선구간 시점 과 종점 의 정보를 통해 식 (5)의 1차 직선방정식을 이용하여 중앙차선의 GIS 차선정보를 생성하였다. 직선방정 (2)
(3)
Min-Woo Kim․Sang-Chan Moon․Da-Ni Joo․Soon-Geul Lee
Fig. 1 Generating GIS lane data of a straight section
Table 1 Obtained GIS data for the straight test section of the highway (Coordinate axis: 411000, 254000 (m))
좌측차선 중앙차선 우측차선
X(m) Y(m) X(m) Y(m) X(m) Y(m) 시점 839.21 285.53 838.99 281.74 838.77 277.95 종점 508.61 246.6 508.40 242.87 508.18 239.08
식으로 GIS 차선정보가 수집됨으로 시점과 종점의 좌표만으로 일정구간의 GIS 정보 생성이 가능하다.
Fig. 1은 2 차선 직선 구간의 GIS 정보 획득 및 생성 과정이다.
생성한 중앙차선 GIS 방정식에 도로 폭 3.5 m 만 큼 좌우로 평행이동하여 좌우측 차선 1 차 직선방적 식을 얻음으로써 800 m 구간 2 차선 직선도로의 GIS 차선정보를 획득하였다. Table 1은 위의 직선도로 GIS 획득방법을 적용하여 얻은 2차선 직선도로의 GIS 차선정보이다.
(5)
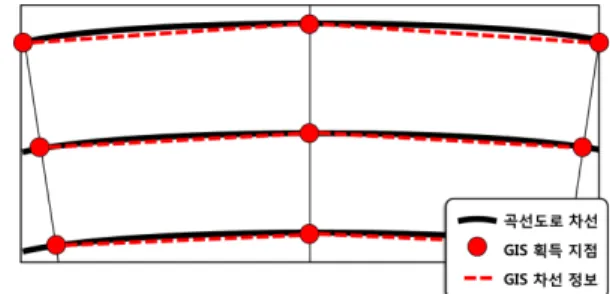
효율적인 곡선구간의 GIS 차선정보 획득을 위해 서 도로의 곡률반경을 고려하여 전체 곡선 구간을 부분적으로 직선화하여 처리하였다. 합류지점 또는 분기점 등을 포함하더라도 대부분의 고속도로 주행 구간은 곡률반경 200 m 이상을 유지하고 있다. 이 곡률반경을 기준으로 15 m 구간마다 선형화 구간을 고려하면 최대 오차가 14 cm가 되어 차선이탈 오차
Fig. 2 Generating GIS lane data of a curve section
한계인 25 cm 이하로 구성된다. 따라서 15 m 구간마 다 GIS 차선 좌표를 획득하였으며, 획득 좌표를 기 준점으로 가상의 경계선으로 직선화하여 Fig. 2와 같이 곡선도로 450 m 구간의 GIS 차선정보를 획득 하였다.
3. 영상기반 차선정보 추출 방법 3.1 영상 역투영 변환 및 전처리
도로상의 차선을 추출하기 위하여 차량 전면부 중앙에 카메라를 설치하였다. 카메라를 통해 입력 받은 도로영상을 전처리 과정을 통하여 차선을 추 출하게 된다. 정면 영상을 통해 추출된 차선의 경우 Fig. 3의 (b), (c)와 같이 차량의 해딩각, 차선 내 위치 에 따라 각도, 위치, 너비 등이 다르게 촬영되어 오 차가 발생하게 된다. 차량의 해딩각과, 차선 내 위치 에 따른 오차를 최소화하기 위해 영상처리 과정에 서 역투영 변환 기법(IPM, Inverse Perspective Mapp- ing)을10) 적용하였다.
역투영 변환 기법은 도로가 평평하다는 가정 하 에 원근효과를 제거해 줌으로써 차선탐지를 용이하 게 한다.11) Fig. 4의 (a), (b), (c), (d)와 같이 직선, 곡선 도로의 정면영상을 역투영 변환 할 경우 차선이 평 행하게 출력되어, 해딩각과 차선 내 차량위치에 의 한 오차를 최소화할 수 있다.
역투영 영상을 흑백 영상으로 변환한 후, 이진화 과정을 거처 차선과 주변 경계를 구분한다. 이진화 과정에서 영상촬영시점의 조도에 따라서 주변 환경 과 차선이 구분되지 않는 경우가 발생되므로, 추출 하는 임계값 를 설정해야 하며, 임계값 는 실험 환경에 따라 변할 수 있다. 다양한 환경에 적용하기 위해, 급격히 밝기가 변하는 부분을 기준으로, 영상
Matching GIS Lane Data with Vehicle Position Using Camera Image
(a) (b) (c)
Fig. 3 Lane image according to the heading angle and the location within lanes of a vehicle
(a) (b)
(c) (d)
(e) (f)
Fig. 4 Inverse perspective mapping (a) An orignal image of a straight section, (b) An orignal image of a curved section, (c) IPM of (a), (d) IPM of (b), (e) Binary image of (c), (f) Binary image of (d)
을 이진화하는 적응형 이진화(Adaptive thresholding)11) 기법을 적용하였다. 실험장소의 환경조건에 최적화
하기 위하여 반복적인 실험을 통해 얻은 임계값 170 이 사용되었다. 식 (6)을 통하여 1 ~ 255의 수로 표현 된 흑백 영상의 픽셀 값을 임계값 에 따라 1, 0으 로 이진화하였으며 Fig. 4의 (e), (f)는 이진화 변환 영 상이다. 영상 전처리 과정을 통해서, 영상화면의 차 선을 명확하게 추출함을 확인할 수 있다.
≥ (6)
마지막으로 구분된 차선 내 중심점을 구하고 중 심점을 통해 차로의 중앙선을 추출한다. Fig. 5(a)는 차선 내 중심점을 잘못 추출하여 정확한 차선 영역 을 얻지 못한 경우를 보여 준다.
(7) 정확한 차선 내 중심점을 검출하기 위하여 차선 시점 픽셀 과 차선 종점 픽셀 를 찾고 식 (7)을 통해 차선 내 중심점 를 계산하였다. Fig. 5(b)는 이와 같이 얻어진 차선 중심점과 추출된 차선 픽셀 점을 보여준다.
Fig. 5 Extraction of lane (a) Incorrect case, (b) Correct case
국내 고속도로 곡선 구간의 경우 주행 설계속도 가 120 km/h 이상이며, 최소 곡률반경이 630 m 으로 상대적으로 큰 반경의 곡률로 설계되어 있다.12) 또 한 도로영상의 차선 획득 시 헤딩각 및 영상처리 오 차의 최소화를 위해 도로의 짧은 범위를 관심영역 (ROI, Region of Interest)으로 설정한다. 따라서 곡률 반경이 큰 곡선도로 영상을 역투영 변환할 경우 Fig. 4 의 (b), (d)와 같이 직선도로와 유사한 형태로 얻어지 며, 전술한대로 곡선을 부분적으로 직선화하여 처 리가 가능하다.
김민우․문상찬․주다니․이순걸
3.2 영상에 의한 차선내 차량 상대위치 측정 GIS 차선정보를 보정하기 위해 영상센서를 통해 차선에 대한 차량의 위치를 추정한다. 2차선 도로의 경우 영상 중심점을 기준으로 좌우측의 차선 개수 에 따라 차량의 주행차로를 판별할 수 있다. 영상센 서를 통해 추정된 차선에 대한 차량의 상대위치를 DGPS로 측정된 차량의 위치와 비교를 통해 기존의 GIS 차선정보를 보정할 수 있다.
Fig. 6 Calculation of distance between a vehicle and lanes
(8)
(9)
⋅
⋅
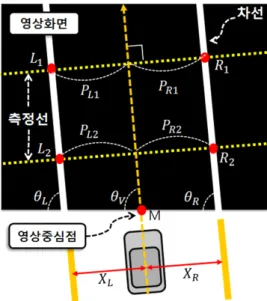
(10)Fig. 6은 영상을 통해 차선에 대한 차량의 상대위 치를 얻는 방법을 도시화 한 것 이다. 영상에서 차량 의 픽셀 위치를 계산하기 위해, 식 (8)에서 얻은 양쪽 차선의 평균 각도 와 조감도에서 얻은 영상의 중 심점 을 사용한다. 이를 통해 영상에서 차 선에 대한 차량의 상대위치는 식 (9)의 직선방정식
으로 표현된다.
차량과 차선과의 픽셀거리 , , , 는 직선방정식 (9)와 차선 측정점 간의 거리로 간단하 게 얻을 수 있다. GIS 도로정보가 있는 도로환경에 서는 차로 폭 W를 알 수 있으므로, 차량과 차선간의 픽셀거리와 차로 폭 W를 통한 비례식을 사용하여 식 (10)과 같이 차량과 차선간의 실제거리 X를 계산 한다. 오차를 줄이기 위하여 두 개의 측정점에서 얻 은 거리의 평균값을 사용하였다. 곡률반경이 630 m 이상인 곡선도로 영상의 차선을 Fig. 4(f)와 같이 직 선화 하여 10 cm 이내의 오차로 차량의 위치를 추정 할 수 있었다.
4. GIS 차선정보 매칭 방법 및 실험 4.1 GIS 차선정보 매칭방법 및 조건
Fig. 7은 영상에 의한 GIS 차선정보 매칭 방법을 도식화한 것이다. X는 영상을 통해 추정된 차선과 차량의 실제 간격이며, D는 DGPS로 측정된 차량과 GIS 차선정보와의 거리이다. X, D의 길이는 ℓ 만큼 의 차이가 있으며, 이를 통해 기존의 GIS 차선정보 를 ℓ 만큼 보정하였다. GIS 차선정보의 경우 식 (11)과 같은 직선 방정식으로 표현되므로, 일정구간 의 GIS 정보 ′,′를 보정하는데 짧은 시간이 드는 장점이 있다.
차량의 DGPS와, GIS 차선정보의 오차 발생을 판 별하고, 정확한 GIS 보정 시점을 결정하기 위하여
Fig. 7 Correction of GIS lane information
영상을 이용한 주행차량 위치정보와 GIS 차선 데이터 매칭 기법
단일 버퍼링 기법(SBM, single buffering method)을 적용하였다. 단일 버퍼링 기법은 상대적으로 정확 도가 높은 라인 형태의 기준자료에 일정 크기의 버 퍼를 생성하고, 버퍼 내에 일치되는 관측 자료의 포 함 비율을 계산하여 위치 정확도를 산정하는 방법 이다.13) GIS 차선정보는 직선형태로 표현되어 있으 므로 단일 버퍼링 기법이 적용 가능하다. 차량이 주 행차로의 주행방향으로 주행하고 있을 때, 단일 버 퍼링 기법을 사용할 경우 GPS의 순간적으로 큰 오 차 발생에 대한 시스템 오작동을 줄일 수 있다.
′
′
(11)
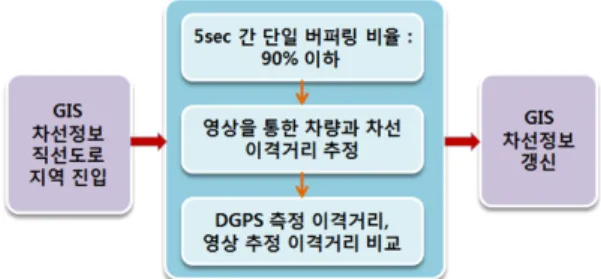
ISO 17361의 차선이탈평가기준을 고려하여 버퍼 크기는 200 cm가 되며 Fig. 8과 같이 차선 내 기준거 리를 나타낼 수 있다.14) 5초 동안 주행하는 차량의 DGPS 위치정보의 버퍼 내 포함 비율이 90% 이하를 기준으로 제안된 GIS 보정 알고리즘이 작동하게 된 다. 단일 버퍼링 기법을 통해 판별된 GIS 차선정보 보정 시점에서, 1초간 15 프레임의 영상을 수집할 수 있다. 수집된 15 프레임의 영상에서 추정된 이격 거리 X와 DGPS 측정 이격거리 D에 대한 차이값 ℓ 의 평균치를 평행이동하여 GIS 차선정보를 보정하 게 된다.
곡률반경이 작은 곡선구간의 경우 영상을 통한 차선대비 차량위치 추정오차가 크므로, 정밀한 GIS 차선정보 매칭을 위하여, 직선 및 곡률반경이 큰 도 로에서 보정 알고리즘을 구동하도록 하였다. 또한,
Fig. 8 Application of single buffering method
Fig. 9 Flowchart for correction of GIS lane data
정확한 보정을 위하여 차량의 DGPS 좌표 정보가 차 로구분 수준 정밀도인 1.5 m 이내 오차를 가지는 DGPS가 요구된다. GIS 차선정보 보정 과정 및 조건 을 Fig. 9에 나타냈다. 단일 버퍼링 기법을 통해 판별 된 보정 시점에서 1초간 영상정보를 수집하고 처리 하므로, 기존 영상센서의 문제점인 처리시간 지연 문제를 해결할 수 있다.
4.2 실험 환경
GIS 차선정보 보정방법 검증을 위하여 중부내륙 고속도로에 위치하고 있는 한국도로공사 시험도로 2차선 직선도로 800 m 구간에서 3회 반복 실차실험 을 진행하였다. 차로 폭 3.6 m, 차선 폭 15 cm이며, 실험을 위하여 Novatel사의 ‘Smart-V1’ 모델인 20 Hz, 정밀도 20 cm의 DGPS를 사용하였다.16) 기준국 DGPS와 이동국 DGPS 간 통신을 위하여 WAVE (Wireless Access in Vehicular Environment) 통신을 사용하였으며, 카메라는 시중에서 쉽게 구할 수 있 는 15 Hz 웹카메라를 사용하였다.
WAVE 통신은 고속 무선 패킷 전송에 적합한 중 단거리 무선 데이터 통신이다. V2X(Vehicle to Every- thing) 환경을 요구하는 지능형 교통시스템에 활용 되고 있으며, 안정성 검증 및 활용 연구가 활발히 진 행되고 있다.15) 기준국 DGPS에서 생성된 RTCM 3.1 표준기반 보정신호를 WAVE 통신을 통해 차량에 전달하며, 보정신호를 전달받은 이동국 DGPS 센서 에서 보정된 위치정보를 제공하게 된다. Fig. 10은 실험에 사용한 장비와 설치위치를 도식화한 것이다.
4.3 실험 결과
단일 버퍼링 기법을 적용하여 GIS 보정시점을 결
Min-Woo Kim․Sang-Chan Moon․Da-Ni Joo․Soon-Geul Lee
Fig. 10 Experimental setup13)
Fig. 11 Update time of GIS data by SBM
정한 결과, Fig. 11과 같이 GIS 보유지역 진입 후 3번 의 보정시점을 나타내고 있다. 각각의 시간은 주행 시간을 기준으로 5, 10.2, 10.9 초에 발생하였다. Fig. 12 는 GIS 차선정보 보정시점에서 1 초간 수집한 영상 과 DGPS를 통해 계산된 보정거리이다. 최소값과 최 대값이 편차는 각각 3.5, 3.1, 3.2 cm로 확인하였으 며, GIS 차선정보 보정에 적용되는 평균값은 12.06, 13.92, 8.4 cm로 측정되었다.
차량이 차로 중심에서 주행하는 실험을 통하여 GIS 차선정보를 매칭하기 전과 측정된 보정거리를 적용하여 매칭한 이후를 비교하였다. Fig. 13에서 직 선은 GIS 차선정보를 나타내고, 점선은 주행 중 차 량의 DGPS 위치정보를 보여준다. 기존의 GIS 차선 정보를 보정하지 않고 사용한 경우의 차선과 차량 정보를 Fig. 13(a)에 나타냈다. 실제 차량이 차선 중 심에 위치하여 주행하고 있으나 GIS 차선정보의 오 차로 한 쪽 차선에 치우쳐서 주행하는 것으로 나타 나고 있다. 제안 알고리즘을 통해 GIS 차선정보를 매칭한 경우는 Fig. 12(b)와 같이 차량에 대한 차선 의 위치정보가 보정되어 차로의 중앙에 위치하여 주행하는 것을 볼 수 있다.
Table 2는 보정오차의 정확한 측정을 위하여 차량
Fig. 12 Updated distance of GIS data during 1 second
Fig. 13 GIS matching test (a) Original GIS lane data, (b) Matching GIS lane data
을 차로 중심에 위치시킨 후, 기존 GIS 차선정보와 매칭된 GIS 차선정보를 비교한 결과이다. 3회에 걸 친 실험에서 보정 거리 오차 평균은 5.36%이며, 매 칭 후에 측정 된 GIS 차선정보의 오차는 1.38%로 감 소하는 것을 확인할 수 있었다.
Table 2 Test parameter and lane-vehicle distance by GIS 실제
간격 (m)
GIS 보정 거리 (m)
매칭 전 측정 간격 (m)
매칭 후 측정 간격 (m)
매칭 전 오차
(%)
매칭 후 오차
(%) 1차
1.8
0.1206 1.6688 1.7886 7.29 0.63 2차 0.1392 1.6967 1.8349 5.73 1.94 3차 0.0840 1.7449 1.8283 3.06 1.57
평균 5.36 1.38
5. 결 론
본 연구에서는 차량에 장착된 저가형 카메라를
Matching GIS Lane Data with Vehicle Position Using Camera Image
통하여 GIS 차선정보 매칭방법을 제시하였으며, 실 차실험을 통하여 매칭된 GIS 차선정보를 검증하였 다. 역투영 영상 기법을 적용하여, 영상을 통해 정확 한 차량과 차선간의 거리를 추정하였다. 단일 버퍼 링 기법을 사용하여 GIS 차선정보 매칭 시점을 판단 하였으며, 한번의 카메라 영상을 이용하여 주행 중 GIS 차선정보를 보정함으로써 영상 활용의 주된 문 제점인 처리시간 지연문제를 해결하였다. 또한, 측 정된 보정 오차로 GIS 차선정보를 매칭함으로써 차 량의 정확한 주행위치를 판단하였으며, 카메라를 통한 저비용 GIS 차선정보 매칭 시스템 구축의 가능 성을 확인하였다.
본 연구는 직선도로와 곡률반경이 큰 곡선도로환 경에서 효과적인 적용이 가능하다. 향후 곡률반경 이 작은 곡선 구간에도 대응 가능한 차선 인식 및 GIS 보정 알고리즘 연구로 확대가 가능하며, 2 차로 이상의 도로에서의 연구를 통해 보편적인 환경에서 사용할 수 있는 시스템을 구축할 계획이다.
후 기
본 연구는 지식경제부 기술혁신사업의 연구비지 원(과제번호. 10040990)에 의해 수행되었습니다.
References
1) Future Management Institute, New Economic Dictionary, 4th Edn., Future & Management, Seoul, 2006.
2) S. H. Park, “GIS Based Intelligent Transporta- tion System Technology Trends,” Surveying &
Mapping Magazine, Vol.117, No.7, pp.78-83, 2011.
3) E. S. Lee, J. I. Park, S. H. Im, M. B. Heo and C.
H. Yeom, “Technical Trend for Performance Improvement of GNSS Based Positioning in Land Transportation Environment,” Transac- tions of KSAE, Vol.10, No.1, pp.179-195, 2012.
4) S. C. Moon, S. G. Lee, J. J. Kim and B. S. Kim,
“Detecting Lane Departure Based on GIS Using DGPS,” Transactions of KSAE, Vol.20, No.4, pp.16-24, 2012.
5) V. L. Knoop, P. J. Buist, C. J. M. Tiberius and B. V. Arem, “Automated Lane Identification Using Precise Point Positioning an Affordable
and Accurate GPS Techique,” 15th Interna- tional IEEE Conference on Intelligent Trans- portation Systems, pp.939-944, 2012.
6) M. Gerke, “Automatic Quality Assessment of GIS Road Data Using Aerial Imagery,” IAPRS, Vol.36, Part. 3/W24, pp.171-176, 2005.
7) Y. H. Lee, “A Method of Mono Camera Based Lane Detection,” KSAE Annual Conference Proceedings, pp.1810-1815, 2010.
8) J. O. Hwang, K. S. Huh, H. M. Na, H. G. Jung, H. J. Kang and P. J. Yoon, “Development of a Lane Keeping Assist System Using Vision Sensor and DRPG Algorithm,” Transactions of KSAE, Vol.17, No.1, pp.50-57, 2009.
9) S. C. Moon, M. W. Kim, D. N. Joo and S. G.
Lee, “Detecting of Driving Lane Using GPS/RTK and RFID,” Proceedings of ITSWC, pp.3197- 3198, 2013.
10) M. Bertozzi, A. Broggi and A. Fascioli, “Stereo Inverse Perspective Mapping: Theory and Appli- cation,” Image and Vision Computing, Vol.16, No.8, pp.585-590, 1998.
11) Y. H. Ji, J. H. Bae, J. B. Song, J. K. Ryu and J.
H. Baek, “Outdoor Localization through GPS Data and Matching of Lane Markers for a Mobile Robot,” Proceedings of ICROS, Vol.18, No.6, pp.594-600, 2012.
12) Land Traffic Regulations in Korea, Regulations of Structures and Facilities Standards of Road, Technical Report of Ministry of Land, Infra- structure and Transport No. 1, 2013.
13) H. G. Park and Y. J. Joo, “Evaluation Scheme of the GPS Positional Accuracy for Dynamic Bus Route Information Using SMB(Single Buffering Method),” Journal of KSGPC, Vol.29, No.6, pp.677-685, 2011.
14) International Standard, Intelligent Transport Systems Lane Departure Warning Systems Per- formance Requirements and Test Procedures, ISO 17361:2007.
15) M. W. Kim, S. C. Moon, D. N. Joo and S. G.
Lee, “A Study on Update Method of GIS Lane Data Using Camera,” KSAE Annual Confer- ence Proceedings, pp.766-767, 2013.
16) Novatel Inc., http://www.novatel.com, 2013.