CopyrightⒸ2015 KSAE / 139-04 pISSN 1225-6382 / eISSN 2234-0149 DOI http://dx.doi.org/10.7467/KSAE.2015.23.6.591 Transactions of KSAE, Vol. 23, No. 6, pp.591-600 (2015)
특성 손실 평가를 통한 하이브리드 자동차 동력전달장치의 빠른 설계 최적화
박 세 호․안 창 선*
부산대학교 기계공학부
Computationally Effective Optimization of Hybrid Vehicle Powertrain Design Using Characteristic Loss Evaluation
Seho Park․Changsun Ahn*
School of Mechanical Engineering, Pusan National University, Busan 46241, Korea (Received 25 February 2015 / Revised 21 July 2015 / Accepted 28 July 2015)
Abstract : The efficiency of a powertrain system of hybrid vehicle is highly dependent on the design and control of the hybrid powertrain system. In other words, the optimal design of the powertrain systems is coupled with optimal control of the powertrain system. Therefore, the solution of an optimal design problem for hybrid vehicles is computationally and timely very expensive. For example, dynamic programming, which is a recursive optimization method, is usually used to evaluate the best fuel economy of certain hybrid vehicle design, and, thus, the evaluation takes tens of minutes to several hours. This research aims to accelerate the speed of efficiency evaluation of hybrid vehicles. We suggest a mathematical treat and a methodological treat to reduce the computational load. The mathematical treat is that the dynamics of system is discretized with sparse sampling time without loss of energy balance. The methodological treat is that the efficiency of the hybrid vehicle is inferred by characteristic loss evaluation that is computationally inexpensive.
With the suggested methodology, evaluating a design candidate of hybrid powertrain system is taken few minutes, which was taken several hours when dynamic programming is used.
Key words : Hybrid electric vehicle(하이브리드 전기 자동차), Efficiency analysis(효율 해석), Design analysis(설 계 해석), Characteristic loss(특성 손실), Minimum electric loss(최소 전기적 손실), Minimum mechanical loss(최소 역학적 손실)
Nomenclature1) Te : engine torque (N・m) TMG2 : MG2 torque (N・m)
Tfric_brake : friction brake torque (N・m) To : output gear torque (N・m) TMG1 : MG1 torque (N・m) Ie : engine inertia (kg・m2) Ic : inertia of carrier gear (kg・m2)
*Corresponding author, E-mail: [email protected]
Is : inertia of sun gear (kg・m2) IMG2 : MG2 inertia (kg・m2) IMG1 : MG1 inertia (kg・m2) R : radius of ring gear (m) S : radius of sun gear (m)
: engine acceleration (rad/s2)
: acceleration of ring gear (rad/s2)
: MG1 acceleration (rad/s2)
박세호․안창선
1. 서 론
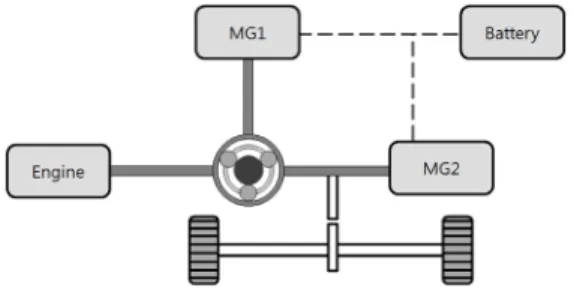
하이브리드 차량의 장점 중 하나인 고연비는 많 은 요소들의 영향을 받는다. 하이브리드 동력시스 템을 이루는 개별 구성품의 효율성뿐만 아니라, 이 구성품의 배치방법이나 크기 등도 중요한 요소이 다. 하드웨어적인 측면에서는 엔진, 모터, 제너레이 터와 구동 휠 등의 크기와 이들을 연결하는 방법이, 소프트웨어적인 측면에서는 각 동력장치들의 제어 알고리즘이 연비에 영향을 미치는 중요한 요소이 다. 특히 Fig. 1의 연결 구조와 Fig. 2의 동력 분배장 치(유성기어)를 기반으로 하는 Power-split 형태의 하이브리드 자동차는 각종 장치들의 연결 방식 및 구성품의 크기의 조합에 따라 효율의 변화가 크다.
이러한 요소들을 최적화하기 위하여 컴퓨터 시뮬 레이션이 많이 이용되는데, 다양한 방법이 개발 및 응용되고 있다. 주로 쓰이고 있는 Dynamic Progra- mming(이하 DP)과 Stochastic Dynamic Programming 등을 통한 최적화1-3)는 일반적으로 많은 계산량을 요구하여 계산 시간이 많이 소모된다. 이러한 최적 화 방법을 이용하여 디자인의 성능을 평가하는 연
구들4-12)도 진행되고 있는데, 계산 시간이 오래 걸린
다는 단점이 있다. 최적값의 직접 계산을 통한 설계
Fig. 1 Configuration of power-split hybrid system
Fig. 2 Diagram of a planetary gear set. R means the radius of the ring gear and S means the radius of the sun gear
최적화는 성능의 절대값을 비교할 수 있다는 장점 이 있지만, 앞서 언급한 대로 너무 많은 계산량을 요 구하여, 설계변수들을 연속적으로 변화시켜가며 최 적값을 찾는 방법에 적용하기 힘들다. 따라서 DP와 같이 최적 제어 검증 기반으로 설계를 최적화하는 경우는 몇몇 설계안을 미리 정한 후 이에 대한 성능 을 비교 평가하는 것에 한정된다.
본 논문에서는 최고 효율을 갖는 설계안을 선정 하기 위한 빠른 계산 방법을 제안한다. 우선 효율적 이면서도 에너지 입출력 측면에서 오차가 적은 이 산화 방법을 제안한다. 이어서 반복적인 계산을 요 구하는 DP를 사용하지 않고 주어진 하이브리드 파 워트레인 시스템의 최고 효율을 매우 빠르게 비교 평가할 수 있는 방법을 제시하도록 하겠다. 제안한 방법을 이용하여 기어비 설계값을 다양하게 변화시 키면서 빠른 속도로 연비를 평가하겠다.
2. 에너지 입출력 오차가 적은 이산화 방법 하이브리드 시스템의 최적 제어 또는 최적 설계 는 빠른 계산을 위하여 이산화 된 모델을 사용한다.
특히 빠른 계산을 위해 큰 시간 간격으로 이산화 된 동역학을 이용한다. 이산화 시 시간 간격을 크게 하 면 계산 시간을 줄일 수 있지만, 이산화에 따른 모델 의 오차가 발생할 수 있다. 특히 하이브리드 자동차 의 성능을 평가하기 위해서는 동력의 입력과 출력 그리고 에너지의 입력과 출력이 수치적으로 일치해 야 한다.
2.1 일반적인 이산화 방법의 문제점
일반적으로 연속시간 기반 동역학의 이산화를 위 해 오일러 근사법을 이용하는데, 시간 간격을 크게 하여 시뮬레이션 하는 경우, 동력 입출력은 일치하 지만, 에너지 입출력이 일치하지 않는 경우가 많다.
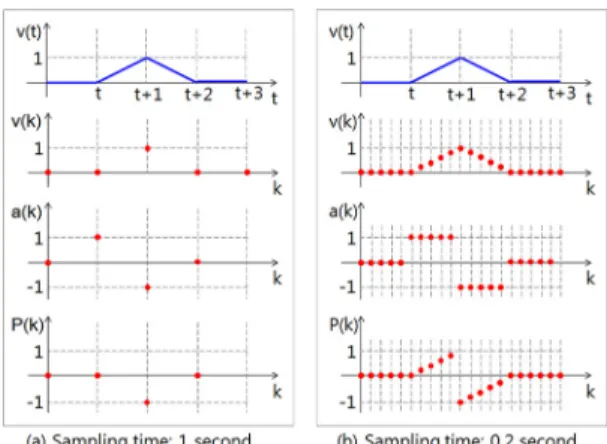
예를 들어 Fig. 3은 질량이 1인 물체가 t초에서 가 속을 시작하고 t+1초에 감속을 시작하는 형태의 운 동을 이산화한 그래프이다. 속도를 주어진 sampling time에서 이산화하고 가속도는 오일러 근사법에 의 해 다음과 같이 계산하였다.
(1)
특성 손실 평가를 통한 하이브리드 자동차 동력전달장치의 빠른 설계 최적화
Fig. 3 Example of discretized dynamics
또한 동력은 아래와 같은 식으로 계산된다.
⋅ ⋅ (2)
Fig. 3(a)은 위로부터 연속시간에서 속도, 이산화 된 속도, 이산화 된 가속도 그리고 이를 이용하여 계 산된 동력 그래프를 보여준다. 차량이 정지 상태에 서 출발하여 정지 상태로 멈췄으므로 총에너지의 변화량은 0이다. 또한 에너지의 변화량은 동력을 시 간으로 적분한 값으로 계산할 수도 있는데, Fig. 3(a) 의 동력을 기반으로 계산하면 총에너지 변화량이 -1 이다. 이런 오차가 발생하는 이유는 하나의 신호와 오일러 근사법을 통하여 구한 미분 값 또는 적분 값 이 곱하여 계산될 때 만큼의 시간오차가 생기 기 때문이다. 에너지 계산을 위해 동력을 시간에 대 해 적분하면 이 오차가 누적되므로 에너지의 입출 력이 일치하지 못한다. 이 오차를 줄이는 방법은 sampling time 를 줄이는 것이다. Fig. 3(b)에 나타 난 것처럼 sampling time을 0.2로 한 경우에는 동력 을 시간에 대하여 적분한 값이 -0.2로 오차가 줄었 다. sampling time을 줄임으로써 이산화로 인한 에너 지 계산 오차를 줄일 수 있지만 이는 총 계산 시간의 증가를 가져온다.
따라서 본 논문에서는 sampling time을 줄이지 않 고도 에너지 보존을 만족하는 이산화 방법을 제안 한다.
2.2 제안하는 이산화 방법
기존의 방법에서는 에너지 입출력 계산 시 큰 오 차가 발생하였다. 본 논문에서는 매 시간 간격마다
에너지 평형을 만족시키기 위해서 에너지 기반 동 역학식을 이산화 하는 방법을 택하였다. 단일 질량 m인 물체가 힘 F를 부터 t까지 받는 경우 연속 시간에서 에너지 기반 동역학식은 다음과 같다.
⋅
(3)
위 식의 좌변은 두 시점간의 에너지 차이를 나타내 며 시간에 대한 연속적인 계산이 필요치 않으므로 그 자체로 이산화 된 식이다. 우변의 식은 두 시점 사이 동안 적분의 형태로 표시된다. 위 식을 이산화 하기 위해서, 이 적분계산은 F(τ)와 v(τ)의 이산화 된 값만을 이용하여 수행되어야 한다. 아래와 같이 P(τ)를 와 t에서의 F와 v값으로만 나타내면 그 시간동안 일정한 값을 갖게 된다.
(4)
이를 식 (3)에 대입하면 아래와 같이 정리된다.
⋅
⋅
(5)
위 식은 부터 t까지 운동에너지 변화와 가해준 힘과의 관계를 나타내는 식이며 이 계산을 위해 주 어진 시간 간격 사이의 연속적인 값을 이용하지 않 고 주어진 시간 간격의 양 끝 시점의 값만을 이용한 다. 에너지 입출력이 일치하기 위해서는 위식의 등 호가 항상 유지되어야 하며, 이 때 F는 다음과 같이 계산된다.
(6)
이 결과는 식 (1)과 기본적으로 같은 표현이다. 그 럼에도 불구하고 제안하는 이산화 방법은 매시간 에너지 입출력이 일치한다. 이는 에너지 또는 동력 계산 시 쓰이는 속도가 현재 값이 아닌 현재속도와 미래 속도의 평균값이기 때문이다.
위에서 제시한 에너지 입출력 균형을 보장하는 방법을 이용하여 Fig. 3의 예제를 다시 검증하여 보 자. 속도와 가속도의 이산화는 기존의 방법으로 동
Seho Park․Changsun Ahn
Fig. 4 Power of discretized by suggested method
일하고, 이산화 된 동력의 계산은 식 (4)를 이용한다.
이산화 된 동력 그래프는 Fig. 4와 같다. 이를 시간에 따라 적분하면 에너지의 변화량은 0이다. 이 예제는 동력을 계산할 때 제안하는 방법을 쓰면 시간 간격 이 크게 이산화하여도 에너지 입출력이 일치함을 보여준다.
2.3 Power-split 하이브리드 파워트레인 동역학의 이산화
Power-split 하이브리드 자동차의 효율해석을 위 해서는 이산화가 필요하다. 앞에서 제안하는 방식 의 우수성을 검증하기 위해 기존의 방법과 제안하 는 방법으로 이산화해보도록 하겠다. 대상 하이브 리드 자동차는 Fig. 1의 연결 구조와 Fig. 2의 동력 분 배장치(유성기어)를 기반으로 설계된 2010년 형 Toyota Prius13,14)이다. 이 시스템의 동역학은 식 (7) 과 같은 행렬식으로 표현된다.15)
이 동역학 식을 시간 간격 1초를 기반으로 오일러 방식으로 이산화하면 식 (8)과 같다.
(8)이렇게 이산화한 하이브리드 시스템을 시뮬레이 션 시 에너지 입출력 일치 여부를 살펴보기 위해, Fig. 5에 나타낸 것처럼 배터리와 엔진으로부터 에 너지를 공급받는 시스템을 고려하였다. 시뮬레이션 은 FUDS Cycle을 따라 주행하는 경우에 대하여 실 시하였다.
먼저 기존의 방법으로 동력을 계산하였다. 기존 의 동력 계산 방법에 의해 회전 운동하는 장치의 동 력은 ⋅로 계산하였다. 이 경우 Fig. 6(a)에 보이는 것처럼 입력 에너지보다 소모된 에너지가 더 큰 결과가 도출된다. 또한, 점선으로 표 시된 부분은 운동에너지의 변화가 음수가 나온 부 분이다. 수치적 오차로 인하여 역학적 운동에 관여 하는 동력의 적분값이 음수가 나오는 현상까지 볼 수 있다. 이 문제는 앞서 설명한 것처럼 동역학을 이 산화하고 이를 기반으로 동력을 계산하는 과정에서
Fig. 5 Energy system of hybrid system
(a) Conventional method (b) Suggested method Fig. 6 Comparison of Input/output energy in hybrid vehicles
by (a) Conventional method, (b) Suggested method (7)
Computationally Effective Optimization of Hybrid Vehicle Powertrain Design Using Characteristic Loss Evaluation
발생한다. 이렇게 발생한 오차를 포함하여 계산된 역학적 동력이 발전기나 배터리 등에서 전기적 에 너지로 전환 및 저장될 때 다시 한 번 오차를 발생시 켜 전체 오차가 커진다.
하지만 본 논문에서 제안하는 에너지 입출력 균 형을 보장하는 동력 계산 방법을 이용하는 경우 Fig.
6(b)에서 보이는 것처럼 음의 운동에너지도 없어지 고, 입력에너지와 출력에너지의 오차가 없는 것을 볼 수 있다.
3. 계산 효율이 높은 하이브리드 자동차 연비 평가 방법 개발
일반적으로 하이브리드 자동차의 성능해석을 위 해 DP를 이용하는데, 이는 계산량이 크다. 하이브리 드 자동차 동력시스템의 디자인을 최적화하는 경우 DP를 이용하여 각 디자인의 성능을 평가한다면 디 자인 최적화에 상당한 시간이 요구된다.
본 장에서는 하이브리드 동력시스템의 설계가 변 경될 때, 각 설계들의 시스템효율을 빠르게 평가할 수 있는 방법을 제시한다. 하이브리드 동력시스템 의 효율은 주어진 Driving Cycle에 따라 주행할 때 소모된 연료로 결정된다. 같은 차량에 동력시스템 의 변화만 있는 경우에는 같은 Driving Cycle을 주행 하는 데 공기저항이나 구름저항등으로 소모되는 에 너지는 같다. 따라서 동력시스템 내부에서 소모되 는 에너지가 연비를 결정하게 된다. 동력시스템 내 부에서 소모되는 에너지는 Fig. 5에 나타난 것처럼 엔진에서 연료가 운동에너지로 변환될 때의 손실, 모터 및 제너레이터가 작동할 때의 손실, 배터리 충・방전 시의 손실 등으로 이루어져 있다. 이 손실 들을 엔진에서 발생하는 역학적 손실(Mechanical Loss)과 전기 동력장치들에서 발생하는 전기적 손 실(Electric Loss)로 구분 지을 수 있다. 하이브리드 자동차에서 에너지 입출력 관계는 다음과 같다.
투입 에너지 = 역학적 손실 + 전기적 손실 + 주행손실 + 운동에너지 증가량 위의 관계식에서 투입에너지는 연료량에 비례하 고 주행손실은 동력시스템 변화와 관계없이 Driving Cycle에 따라 결정되는 상수 값이다. 또한 모든 Driving Cycle은 정지 상태에서 출발해서 정지 상태
로 끝나므로 운동에너지 증가량은 없다. 따라서 총 투입에너지는 역학적 손실과 전기적 손실의 합의 함수이다. 실제로 하이브리드 자동차는 역학적 손 실과 전기적 손실의 합을 줄일 수 있다면 연비가 올 라간다. 하지만 일반적으로 엔진을 효율적인 구간 에 작동하도록 하면 전기장치에 에너지 흐름이 증 가하여 전기적 손실이 증가하고, 전기장치에 에너 지 흐름을 줄이면, 엔진이 비효율적 구간에 자주 작 동하게 되어 역학적 손실이 증가한다. 그러므로 효 율이 좋은 하이브리드 동력시스템을 설계하기 위해 서는 역학적 손실과 전기적 손실간의 이율배반적 관계를 고려하면서 두 합이 최소가 되도록 해야 한 다. 단 하이브리드 시스템의 최고 효율은 설계뿐만 아니라 동력흐름의 제어방법에 대해서도 크게 영향 을 받는다. 따라서 모든 손실의 계산은 하이브리드 시스템이 최적으로 제어될 때를 기준으로 고려되어 야 한다. 최적으로 제어되는 경우를 고려하는 것은 결국 DP와 같은 많은 계산량을 요구하는 방법이 필 요하게 되지만, 본 논문은 역학적 손실과 전기적 손 실간의 관계를 이용하여 시스템의 효율을 비교할 수 있는 방법을 제시한다.
제시하는 방법의 개념은 다음과 같다. 하이브리 드 시스템의 성능은 역학적 손실과 전기적 손실이 결정짓는다. 주어진 하이브리드 동력시스템의 역학 적 손실과 전기적 손실을 특별한 조건에서 파악하 고, 이 특성 손실들과 시스템의 최고 연비와의 관계 를 추출하도록 하겠다. 단, 각 특성 손실의 계산은 DP와 같이 반복적인 계산이 필요치 않는 방식을 기 반으로 한다.
3.1 역학적 특성 손실 계산
본 연구에서 역학적 특성 손실은 역학적 장치의 최소 손실로 정의하며, 구체적으로 엔진효율이 가 장 좋도록 제어했을 때의 엔진 손실을 역학적 특성 손실이라고 한다. 엔진 손실을 최소화하는 제어방 안은 직관적으로 생각했을 때, 엔진이 가장 효율적 인 구간(sweet spot)에서만 엔진을 구동시키면 된다.
배터리 충전량이 충분할 경우에는 엔진을 사용하지 않고 배터리 충전이 필요한 경우만 sweet spot에서 구동시킨다. 역학적 손실 특성을 측정하기 위한 제
박세호․안창선
어알고리즘은 아래와 같다.
if PowerDemand ≥ 0, SOC 〉0.45 Te = 0, = 0
if PowerDemand ≥ 0, SOC ≤ 0.45 Te = 100, = 2000
if PowerDemand 〈 0 Te = 0, = 0
3.2 전기적 특성 손실 계산
전기적 특성 손실 또한 역학적 특성 손실과 유사 한 방식으로 정의한다. 주어진 하이브리드 동력시 스템에서 전기적 손실이 최소가 되도록 제어했을 때의 전기적 손실을 전기적 특성 손실로 정의한다.
하이브리드 시스템에서는 모터, 제너레이터, 배 터리가 복합적으로 운용되기 때문에, 세 가지에서 의 전기적 손실을 최소화하는 방법을 직관적으로 추출하기 어렵다. 그러므로 DP의 cost를 전기적 손 실로 한 결과를 바탕으로 각 장치들의 작동방법을 추출하였다.
Fig. 7에 나타낸 DP로 시뮬레이션 한 후의 동력 그래프를 보면 각 장치들의 운용형태를 알 수 있다.
그래프에서 파란색은 주행에 필요한 동력을 나타내 는데, 이는 대부분 검은색의 엔진동력과 일치하는 것을 볼 수 있다. 이는 대부분의 주행동력은 엔진으 로부터 생성되고 배터리로부터 공급되는 양을 최소 화하는 것으로 해석된다. 그리고 분홍색의 모터의 동력은 빨간색의 제너레이터의 동력과 서로 상쇄하
Fig. 7 Power graph of DP for minimum electric loss
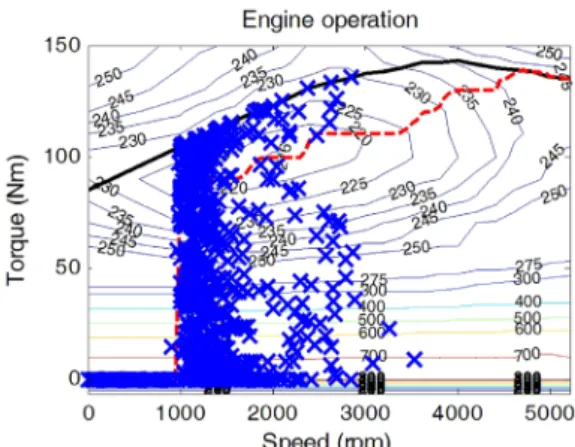
Fig. 8 Engine operation of DP for minimum electric loss
Fig. 9 Standard deviation of power differences of DP for minimum fuel consumption and minimum electric loss, PD : Power Demand, PE : Engine power, PM : Motor power PG : Generator power, PB : Battery power
려는 경향이 있다. 이로부터 제너레이터가 생성한 동력을 배터리로 저장하지 않고 모터가 최대한 소 모하도록 한다는 것을 알 수 있다. 이러한 모터와 제 너레이터의 동작의 이유를 생각해보면, 배터리에 에너지를 저장하는 경우에는 입력과 출력 두 번에 걸쳐 손실이 발생하기 때문에 배터리에 에너지를 저장하지 않기 위한 동작임을 파악할 수 있다. Fig. 8 은 전기적 손실 최소화 시 엔진의 작동 구간을 보여 준다. DP의 cost가 연비가 아니므로 엔진 효율이 좋 지 않은 구간에 자주 작동하고 있음을 알 수 있다.
위의 관찰결과를 확증하기 위해, 일반적인 경우 인 DP의 cost를 연비로 한 경우와 DP의 cost를 전기 적 손실로 한 경우의 각 장치들의 동작을 비교하여 보았다. 각 장치들의 동력의 표준편차 그래프를 보
특성 손실 평가를 통한 하이브리드 자동차 동력전달장치의 빠른 설계 최적화
면, 첫 번째 막대들은 주행에 필요한 동력을 얼마나 엔진이 공급해주느냐를 나타낸다. 그리고 두 번째 막대들은 모터와 제너레이터의 동력이 서로 잘 상쇄 하고 있느냐를 나타내고, 세 번째 막대들은 배터리 에서 동력의 입출력이 얼마나 발생하는지를 나타낸 다. 막대그래프의 크기가 작을수록 표준편차가 작 으므로 괄호안의 값이 0에 가까운 것을 나타낸다. 이 러한 관찰결과를 토대로 제어기의 알고리즘은 아래 의 대수적 관계를 최대한 만족하도록 설계되어야 한다.
PEngine = PDemand
PMotor + PGenerator = 0
이렇게 설계 된 알고리즘을 바탕으로 시뮬레이션 한 후 동력 그래프를 Fig. 10에 나타내었다. 앞서 DP 의 시뮬레이션 결과의 동력 그래프와 비슷한 것을 볼 수 있다. 또한, Fig. 11의 엔진구동 그래프에서 엔 진구동의 형태가 유사한 것을 볼 수 있다.
Fig. 10 Power graph of minimum electric loss algorithm
Fig. 11 Engine operation of minimum electric loss algorithm
3.3 연비와 특성 손실 간의 관계
앞에서 제시한 역학적 특성 손실과 전기적 특성 손실을 하이브리드 동력장치 설계에 대하여 적용하 였다. 유성기어의 링기어 반지름 R과 선기어 반지 름 S의 값들을 변화시키는 방법을 통하여 25가지 설 계안을 마련하였다.
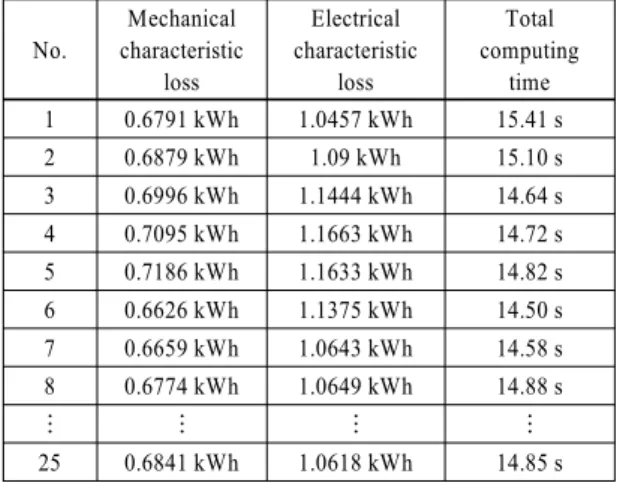
Table 1은 각 설계안들의 기어비들을 나타내며, Table 2는 각 설계안들의 역학적 및 전기적 특성 손 실 계산 시의 각각의 특성 손실 및 계산 시간을 나타 낸다. Table 3은 DP로 계산한 연비와 계산 시간을 보 여준다. Fig. 12의 두 그래프는 다른 관측점에서 바 라본 연비와 역학적 특성 손실 및 전기적 특성 손실 간의 관계를 나타내며, 역학적 특성 손실과 전기적 특성 손실의 합이 작을수록 연비가 커지는 경향을 보이고 있다. 그리고 Fig. 13은 두 특성 손실의 합과 연비의 관계를 나타내는데, 둘이 뚜렷한 상관관계 를 가지고 있음을 알 수 있다.
여기서 주목할 점은 특성 손실의 계산 시간과 DP 특성 손실의 계산 시간이 DP와 대비하여 약 380배 빠른 것을 볼 수 있다.
Table 1 Design changes by planetary gear size
No. Design No. Design
1 R = 1.0, S = 0.8 6 R = 1.2, S = 0.8 2 R = 1.0, S = 1.0 7 R = 1.2, S = 1.0 3 R = 1.0, S = 1.2 8 R = 1.2, S = 1.2
4 R = 1.0, S = 1.4 ⋮ ⋮
5 R = 1.0, S = 1.6 25 R = 1.8, S = 1.6
Table 2 Mechanical and electrical characteristic loss No.
Mechanical characteristic
loss
Electrical characteristic
loss
Total computing
time
1 0.6791 kWh 1.0457 kWh 15.41 s
2 0.6879 kWh 1.09 kWh 15.10 s
3 0.6996 kWh 1.1444 kWh 14.64 s
4 0.7095 kWh 1.1663 kWh 14.72 s
5 0.7186 kWh 1.1633 kWh 14.82 s
6 0.6626 kWh 1.1375 kWh 14.50 s
7 0.6659 kWh 1.0643 kWh 14.58 s
8 0.6774 kWh 1.0649 kWh 14.88 s
⋮ ⋮ ⋮ ⋮
25 0.6841 kWh 1.0618 kWh 14.85 s (9)
Seho Park․Changsun Ahn
Table 3 Best fuel economy computed by DP
No. Fuel economy Computing time
1 24.0077 km/l 5564 s
2 23.6679 km/l 5818 s
3 23.0688 km/l 5502 s
4 23.0890 km/l 5725 s
5 22.7618 km/l 5503 s
6 24.4944 km/l 6681 s
7 23.9821 km/l 5476 s
8 23.4774 km/l 5628 s
⋮ ⋮ ⋮
25 23.9316 km/l 5635 s
Fig. 12 Mechanical characteristic loss vs electrical charac- teristic loss vs fuel economy
Fig. 13 Characteristic loss vs fuel economy
4. 특성 손실을 이용한 하이브리드 동력시스템 설계안 최적화
앞 장에서 특성 손실의 합과 연비는 단조감소의 상관관계를 가짐을 알아냈다. 이 관계를 이용하여 빠른 속도로 하이브리드 동력시스템의 최적 설계안 을 결정하는 예제를 살펴보도록 하겠다. 앞선 사례
Fig. 14 Design space for hybrid powertrain system
처럼 하이브리드 동력시스템의 유성기어비를 최적 화하기 위해 링 기어 반지름 R과 선 기어 반지름 S 를 변화시키는 방법으로 Fig. 14와 같이 126가지의 설계안을 마련하고, DP만을 이용하는 방법과 제안 하는 방법 각각을 이용하여 설계안을 평가하고 소 요시간을 비교하였다.
4.1 DP를 이용한 설계안 최적화
Fig. 15(a)는 각각의 기어의 조합에 따른 연비를 DP를 이용하여 계산한 결과를 나타낸 그래프이다.
그래프에서 R과 S의 절대값보다 R과 S의 비율이 연 비에 크게 영향을 미치는 것을 볼 수 있다. 실제로 식 (7)을 살펴보면 Power-split 방식의 하이브리드 시 스템은 R과 S의 절대값이 아닌 둘의 비율이 동역학 식을 결정함을 알 수 있다. 따라서 R과 S로 이루어 진 설계공간을 R/S값으로만 이루어진 설계공간으 로 치환하여 검증할 수 있다.
(a) Fuel economy in R-S design space
(b) Fuel economy in R/S design space Fig. 15 Design evaluation by characteristic loss and DP
Computationally Effective Optimization of Hybrid Vehicle Powertrain Design Using Characteristic Loss Evaluation
설계안에 대한 연비 그래프를 R/S값에 대한 그래 프로 Fig. 15(b)와 같이 재구성하였다. R/S의 비율이 5보다 크거나 1보다 작은 경우는 연비가 매우 낮게 측정되었고, R/S이 1.2와 2.6사이의 값을 가질 때 연 비가 높았다. DP를 이용하여 126개의 모든 디자인 을 연비를 평가하는 경우 약 196시간이 걸렸다.
4.2 특성 손실을 이용한 설계안 최적화 제안하는 방법을 이용하여 최적의 설계안을 선정 한 과정은 Fig. 16에 나타냈다. Fig. 16(a)는 R과 S의 변화에 따른 특성 손실합의 역수를 나타내며, 붉은 색으로 갈수록 특성 손실합의 역수가 높은(특성 손 실의 합이 작은)상태를 나타낸다. 달리 말하면 붉은 색으로 갈수록 연비가 높은 R과 S의 조합임을 나타 낸다. Fig. 15(a)와 비교하여 보면 앞 장에서 찾았던 경향대로 특성 손실의 합이 낮은 곳이 연비가 높은 곳과 유사한 위치임을 알 수 있다. 단, 둘의 상관관 계가 완벽하지 않기 때문에 특성 손실을 통한 연비 비교는 전체 설계공간에서 대략적인 후보군으로 빨 리 수렴시키는데 활용하고, 이후 수렴된 후보군에 서 최적 설계안을 찾는 것은 DP와 같이 느리지만 정 확한 연비 계산이 가능한 방법을 통하여 수행하였다.
(a) Inverse characteristic loss in R-S design space
(b) Inverse characteristic loss in R/S design space
(c) Fuel economy evaluated by DP in candidate group Fig. 16 Design evaluation process by characteristic loss
본 예제에서는 총 126개의 설계안 중에서 특성 손 실을 통해 연비가 상대적으로 좋은 23개의 후보군 을 Fig. 16(b)의 붉은 점과 같이 빠르게 선정하였다.
이 과정을 위한 계산은 약 30분정도 소모되었다. 이 후 DP를 이용하여 후보군내의 23개 설계안의 연비 를 Fig. 16(c)와 같이 계산하였다. 이 과정은 약 35시 간 정도 소모되었다. 결과적으로, 제안하는 방법을 통한 최적 설계안 선정 시 계산 시간이 DP방법 대비 196시간에서 35시간으로 약 82 % 줄어들었다. 최종 결정된 디자인은 R/S=2.4로 연비가 높게 평가되었 다. 참고로 본 예제의 대상 차량인 2010년 형 Toyota Prius의 경우 R/S=2.6이다.
5. 결 론
본 연구는 하이브리드 시스템의 연비 비교를 빠 른 속도로 수행하기 위한 방법을 제시하였다. 첫째 로 에너지 오차가 발생하지 않으면서도 큰 시간간 격을 사용할 수 있는 이산화 방법을 제안하였고, 둘 째로 특성 손실 값을 이용한 간접적인 연비 비교 방 안을 개발하였다. 연비에 영향을 미치는 역학적 특 성 손실과 전기적 특성 손실을 정의하고, 이 특성 손 실을 빠른 속도로 계산할 수 있는 제어 방법을 개발 하였다. 특성손실들과 연비간의 관계를 도출하여 특성 손실의 계산만으로도 연비를 유추할 수 있도 록 하였다. 제안하는 방법은 다양한 기어비 조합 중 최적의 기어비를 찾아내는 예제에서 DP와 대비하 여 약 5.5배 빠른 계산 속도를 보였다.
후 기
이 논문은 부산대학교 기본연구지원사업(2년)에 의하여 연구되었음.
References
1) C. Mansour and D. Clodic, “Optimized Energy Management Control for the Toyota Hybrid System Using Dynamic Programming on a Predicted Route with Short Computation Time,” Int. J. Automotive Technology, Vol.13, No.2, pp.743-750, 2012.
2) C.-C. Lin, H. Peng, J. W. Grizzle and J.-M.
박세호․안창선
Kang, “Power Management Strategy for a Parallel Hybrid Electric Truck,” IEEE Trans- actions on Control Systems Technology, Vol.11, No.6, pp.839-849, 2003.
3) J. Liu and H. Peng, “Modeling and Control of a Power-split Hybrid Vehicle,” IEEE Transac- tions on Control Systems Technology, Vol.16, No.6, pp.1242-1251, 2008.
4) Y. Li and N.-C. Kar, “Advanced Design App- roach of Power Split Device of Plug-in Hybrid Electric Vehicles Using Dynamic Program- ming,” IEEE Vehicle Power and Propulsion Conference, pp.1-6, 2011.
5) X. Zhang, C.-T. Li, D. Kum and H. Peng,
“Prius+ and Volt-: Configuration Analysis of Power-split Hybrid Vehicles with a Single Pla- netary Gear,” IEEE Transactions on Vehicular Technology, Vol.61, No.8, pp.3544-3552, 2012.
6) C.-T. Li and H. Peng, “Optimal Configuration Design for Hydraulic Split Hybrid Vehicles,”
American Control Conference, pp.5812-5817, 2010.
7) I.-M. Chen, C.-T. Li and H. Peng, “Power Split Hybrid Configurations for Human-powerd Vehi- cles,” ASME Dynamic Systems and Control Conference, pp.1-9, 2014.
8) Z. Filipi, L. Louca, B. Daran, C.-C. Lin, U.
Yildir, B. Wu, M. Kokkolaras, D. Assanis, H.
Peng, P. Papalambros, J. Stein, D. Szkubiel and R. Chapp, “Combined Optimisation of Design and Power Management of the Hydraulic Hybrid Propulsion System for the 6×6 Medium Truck,” Int. J. Heavy Vehicle Systems, Vol.11, No.3, pp.372-402, 2004.
9) A. Boyali, T. Acarman and L. Guvenc, “Com-
ponent Sizing in Hybrid Electric Vehicle Design Using Optimization and Design of Experiments Techniques,” 3rd AUTOCOM Workshop on Hybrid Electric Vehicle Mode- ling and Control, 2007.
10) M. Kang, H. Kim and D. Kum, “Performance Assessment Methodology of Power-split Hybrid Electric Vehicles with a Single Planetary Gear,”
KSAE Annual Conference Proceedings, pp.1250- 1251, 2014.
11) Y. Zou, D.-G. Li and X.-S. Hu, “Optimal Sizing and Control Strategy Design for Heavy Hybrid Electric Truck,” Mathematical Pro- blems in Engineering, Vol.2012, No.1, pp.1-15, 2012.
12) J. Liu and H. Peng, “A Systematic Design Approach for Two Planetary Gear Split Hybrid Vehicles,” Vehicle System Dynamics, Vol.48, No.11, pp.1395-1412, 2010.
13) N. Kim, A. Rousseau and E. Rask, “Vehicle- level Control Analysis of 2010 Toyota Prius Based on Test Data,” Journal of Automobile Engineering, Vol.226, No.11, pp.1483-1494, 2012.
14) T. A. Burress, S. L. Campbell, C. L. Coomer, C. W. Ayers, A. A. Wereszczak, J. P. Cun- ningham, L. D. Marlino, L. E. Seiber and H. T.
Lin, “Evaluation of the 2010 Toyota Prius Hybrid Synergy Drive System,” Energy and Transportation Science Division, ORNL/TM- 2010/253, 2011.
15) J. Liu, H. Peng and Z. Filipi, “Modeling and Analysis of the Toyota Hybrid System,”
IEEE/ASME International Conference on Ad- vanced Intelligent Mechatronics, pp.134-139, 2005.