C1P1 DCB를 추정하는 광역보강항법 시스템
Wide Area Augmentation System Estimating C1P1 DCB
부 성 춘
1*· 소 형 민
2· 김 갑 진
2· 이 철 수
1· 김 도 경
1· 고 요 한
11LIG넥스원 통신/전자전연구센터
2국방과학연구소
Sung-Chun Bu1*· Hyoung-Min So2 · Kap-Jin Kim2· Chul-Soo Lee1· Do-Kyoung Kim1· Yo-Han Ko1
1Communication/Electric Warfare Laboratory Center, LIG Nex1, Gyeonggi-do, 16911, Korea
2The Third R&D Institute–4, Agency for Defense Development(ADD), Daejeon, 34186, Korea
[요 약]
광역보강항법 시스템은 광역 지역에서 사용할 수 있는 보정 데이터(이온층 지연, 위성 및 시계 오차) 및 무결성 정보를 생성하여 전송하는 시스템으로 대표적으로 위성기반 보강항법 시스템인 SBAS가 있다. 미국에서는 WAAS라는 명칭으로 운용하고 있고 유 럽에서는 EGNOS, 일본에서는 MSAS, 러시아는 SDCM, 인도는 GAGAN이라는 명칭으로 광역보강항법 시스템을 운용 하고 있다.
한국에서도 KASS명칭으로 2022년 목표로 개발을 진행하고 있다. SBAS 시스템은 국제민간항공기구 ICAO에서 국제 표준으로 정한 시스템으로 민간 서비스를 위해 운영된다. 따라서 보정 데이터도 민간 SPS 수신기용으로만 사용되고 있다. 본 논문에서는 SPS용 보정항법 시스템을 PPS 수신기에 사용하기 위해 필요한 C1P1 DCB 추정 방법에 대해 논의한다. 추정된 C1P1 DCB 결과를 바탕으로 단일 위성항법에서의 C1P1 DCB영향을 분석 후 SPS용 차분위성항법 시스템을 PPS 수신기에 적용한 결과를 분석하였 다. 마지막으로 SPS용 광역보강항법 시스템을 PPS 수신기에 적용하여 결과를 분석하였다.
[Abstract]
Wide area augmentation system is a system that generates and transmits correction and Integrity information for use in wide area. Typical system is SBAS. In the United States, it operates under the name WAAS, EGNOS in Europe, MSAS in Japan, SDCM in Russia, GAGAN in India. it is developing Korean SBAS which named KASS by 2022 in Korea. SBAS is a standard System that is operated as civil aviation service base and set as international standards by ICAO. So the correction data can only is used for civil SPS receiver. In this paper, we discuss C1P1 DCB estimation which need to use SPS correction service for PPS receiver. Then we analyze C1P1 DCB correction effect under standalone Satellite Navigation and method to use PPS receiver under SPS DGPS. Finally we organize wide area augmentation system for PPS receiver and analysis performance.
Key word : C1P1 differential code bias, Global positioning system, Precise positioning service, Satellite based augmentation system, Standard positioning service.
https://doi.org/10.12673/jant.2018.22.5.400
This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-CommercialLicense(http://creativecommons .org/licenses/by-nc/3.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Received 5 October 2018; Revised 8 October 2018 Accepted (Publication) 23 October 2018 (30 October 2018)
*Corresponding Author Sung-Chun Bu Tel: +82-31-8026-4627
E-mail: [email protected]
Ⅰ. 서 론
GPS(global positioning system) 시스템은 GPS 항법 위성에서 발신하는 전파 신호를 GPS 수신기가 수신하여 수신기의 위치 를 계산하는 시스템이다. GPS 시스템은 여러 가지 환경적인 오차 요소로 인해 위치 오차가 발생 할 수가 있다. 대표적으로 이온층, 대류층, 위성 시계 및 궤도 오차, 다중경로 오차, 수신기 자체 노이즈가 있다. 대류층 오차는 모델링을 통해 거의 제거 가 가능하고 이온층도 모델링을 통해 60% 정도 제거가 가능하 다고 알려져 있다[1]. 하지만 오차 모델링으로 제거 되지 않는 오차 성분으로 인해 GPS 수신기의 위치오차는 수십 미터까지 발생할 수가 있다. 따라서 위치 정확도 향상을 위해 보정 정보 를 생성 및 전송하는 시스템 개발이 필요하다. 현재 보정 정보 를 제공하는 보정항법 시스템으로는 차분위성항법시스템 (DGPS; differential global positioning system), 광역보강항법 시 스템인 SBAS (satellite based augmentation system)가 있다.
차분위성항법시스템은 위치를 정확히 알고 있는 지점인 기 준국에 항법 수신기를 설치 후 수신기를 통해 수신된 데이터를 이용하여 기준국에서의 각 위성별 의사거리 오차를 단일성분 으로 계산하고 사용자에게 전송하는 시스템이다. 차분위성항 법 시스템의 경우 시스템이 간단한 반면 기준국과 사용자 사이 의 이격 거리가 증가하면 보정 정보의 상관성이 떨어져 보정 정보의 정확도가 떨어진다는 단점을 가지고 있다. 따라서 보정 정보 적용 범위가 100km 이내로 제한된다.
반면 광역보강항법 시스템은 이러한 오차 성분을 단일 성분 의 오차 성분이 아닌 이온층 지연, 위성 및 시계 오차 성분으로 구분하고 위성을 통해 보정 데이터를 전송함으로써 차분위성 항법 시스템 보다 광역 지역에서 사용 가능하도록 구성하였다.
이런 GPS 시스템의 오차 완화를 위한 보정 정보와 무결성 정보 를 위성을 통해 제공함으로써 항공기와 같은 시스템에서 사용 가능하도록 국제민간항공기구 ICAO(international civil aviation organization)에서 표준으로 정한 시스템이 SBAS이다. 해외에 서는 국가마다 다른 명칭으로 SBAS 시스템을 운영 중에 있다.
미국에서는 WAAS(wide area augmentation system), 유럽에서 는 EGNOS (european geostationary navigation overlay system), 일본에서는 MSAS(MTSAT satellite based augmentation system), 러시아에서는 SDCM(glonass system for differential correction and system), 인도에서는 GAGAN(GPS aided GEO augmented system)으로 운영 중에 있다. 또한 중국에서는 BDSBAS (beidou SBAS)를 개발 중에 있으며 한국에서도 2022 년 까지 KASS(korean augmentation satellite system)를 개발 중 에 있다.
국내에서 운영 중인 차분위성항법 시스템이나 현재 개발 중 인 광역보강항법 시스템은 민간 SPS(standard positioning service)수신기에서 사용할 수 있는 보정 데이터만 생성/전송하 기 때문에 PPS(precise positioning service) 수신기 사용자는 사 용이 불가 하다. SPS 수신기와 마찬가지로 PPS 수신기도 보정
데이터를 받으면 위치 정확도 성능을 개선시킬 수가 있기 때문 에 PPS 수신기에 대한 보정 정보가 필요하다. 따라서 SPS용 보 정항법 시스템을 PPS 수신기에서 사용하기 위해서는 C1P1 DCB(differential code bias)에 대한 추가적인 정보가 필요 하다.
본 논문에서는 PPS 수신기를 위한 고려해야 할 사항에 대해 논 의 하고 시스템을 구성하여 성능을 분석하였다.
본 논문의 구성은 다음과 같다. Ⅱ장 에서는 위성의 DCB에 대해 설명하였다. 또한 SPS용 차분위성항법 시스템이나 광역 보강항법 시스템을 PPS 수신기에서 사용하기 위해 필요한 C1P1 DCB에 대해 추정한다. 추정된 결과 값은 NASA의 CDDIS (crustal dynamics data information system)에서 제공하 는 위성 C1P1 DCB 값과 비교하여 결과를 분석한다. Ⅲ장 에서 는 추정된 C1P1 DCB결과를 바탕으로 L1 CA 단일 위성항법 (standalone satellite navigation) 위치해에 대한 영향을 분석하고 SPS용 차분위성항법시스템에서 PPS 수신기 사용 시 C1P1 DCB의 영향을 분석한다. 마지막으로 SPS용 광역보강항법 시 스템에 PPS 수신기를 사용하기 위한 시스템을 구성하고 성능 을 분석한다. Ⅳ장에서는 결론을 맺는다.
Ⅱ. GPS 위성 C1P1 DCB
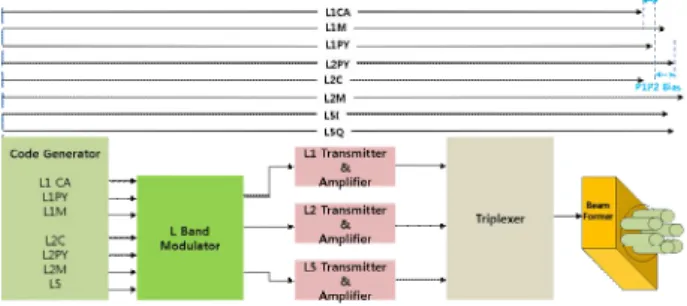
GPS 위성 신호 생성 시 그림 1처럼 RF 소자, 필터, 케이블 특 성으로 인한 지연이 각 주파수와 코드에 따라 다르기 때문에 안 테나 출력 시점에서 각 주파수에 대한 각각의 코드 생성 신호간 에 바이어스가 존재하게 된다[2].
예를 들어 L1 CA와 L1 PY간의 바이어스는 C1P1 DCB, L1 PY와 L2 PY간의 바이어스를 P1P2 DCB로 통상 명명한다. C1P1 DCB의 경우 각 위성간 최대 4 ns(1.2 m) 정도, P1P2 DCB의 경우 12 ns(3.6 m) 범위에서 발생한다[3]. 문제는 각 위성마다 다른 값 을 가지고 있다는 것이다. 이를 보상하지 않으면 사용자의 항법 위치 결과에 오차로 발생하게 된다. 반면 수신기에서도 각 수신 신호간의 바이어스가 발생하는데 이는 모든 위성에 대해 공통 오차로 발생하여 이 오차는 항법 위치 결과에 영향을 주지 않는 다. L1 CA 단일 위성항법이나 기존 차분위성항법시스템, 광역 보강항법 시스템의 경우 SPS 측정값만을 이용해 위치해를 계 산을 하고, SPS용 보정데이터를 만들기 때문에 보정 데이터를 PPS 수신기에서 적용 시 위성의 C1P1 DCB 보상이 없다면 위치 해 오차가 발생하게 된다. 물론 단일 위성 항법에서는 C1P1 DCB오차가 다른 오차(이온층, 대류층, 위성 궤도 및 시계 오차) 에 비해 상당히 작은 값이기 때문에 위치 오차에 미치는 영향은 수 cm정도이지만 광역보강항법 시스템이나 차분위성항법과 같은 정밀 항법으로 갈수록 오차 성분이 제거됨으로써 C1P1 DCB의 오차 성분이 위치해에 미치는 영향이 커지게 된다.
그림 2의 경우 2018년 4월 16일 CDDIS에서 제공한 위성의 C1P1 DCB값을 도시하였다. 위성 간 최대 3.9 ns(~ 1.17 m) 정 도 발생하는 것을 확인 할 수 있다.
그림 1. GPS 위성에서 신호간 지연
Fig. 1. Equipment delay between signal in GPS satellite.
그림 2. GPS 위성의 C1P1 DCB Fig. 2. C1P1 DCB in GPS satellite.
그림 3. 2017년 1년간 전체 GPS 위성의 C1P1 DCB Fig. 3. C1P1 DCB in All GPS Satellite during 2017 year.
그림 3의 경우 2017년 1년간의 위성별 DCB 변화량을 도시 하였다. 4번 위성을 제외하고 1년간 크게 변하지 않는 것을 확 인하였다. 해당 년도에서 4번 위성은 2017년 122일부터 서비 스 가용 상태가 아님을 확인하였다 [4].
2-1 위성 C1P1 DCB 추정
위성 C1P1 DCB에 대한 추정을 위해서 식 (1),(2)와 같이 L1 CA 코드 측정값 C1 과 L1 PY의 측정값 P1에 대해 모델링하였 다.
(1)
(2)
i는 위성의 PRN번호, 은 위성과 수신기간의 Geometric Range, 은 L1 주파수에 대한 이온층 지연값, 는 대류층 지연값, 는 위성 클럭 Bias, 는 수신기 클럭 Bias를 의미 한다. 는 위성에서의 L1 CA 신호 생성 지연,
는 위성에서의 L1 PY 신호 생성 지연, 는 수신기에서 의 L1 CA 신호 지연, 는 수신기에서의 L1 PY 신호 지 연을 의미 한다. 그리고 ,과 ,는 각각 L1 CA와 L1 PY 측정값의 다중경로 오차와 측정값 노이즈를 의미 한다.
(3)
(4)
(5)
(6)
(7)
(8)
위성의 은 식 (3)처럼 정의할 수 있다. 는 식 (1)에서 식 (2)를 차분하여 공통오차인 , , , ,
는 제거함으로써 식 (4)로 계산 될 수 있다. C1 또는 P1의 측정값에 있는 다중경로와 측정값 노이즈 성분합인 MP1값은 식 (5), 식 (6)처럼 C1, P1 의사거리와 L1, L2 반송파 측정값으 로 계산 될 수 있다[5]. 최종 값은 C1 측정값과 P1 측 정값의 차분과 수신기에서의 C1, P1 바이어스 차분 값과 측정 값 C1, P1에 포함되어 있는 MP1간의 차분으로 계산된다.
수신기에서의 바이어스 차분텀인 값은 모든 위성이 수신 안테나부터 신호 처리 단까지 같은 RF소자, 필터, 케이블을 거쳐 수신되기 때문에 모든 위성에 대해 같은 값을 가진다. 따라서 바이어스를 제거 하지 않아도 위치해에 영 향을 주지 않는다. 또한 C1P1 DCB 계산 시 최종 평균값을 0으 로 만드는 과정을 거쳐 각 위성간의 상대적인 값을 계산하기 때 문에 C1P1 DCB값에도 영향을 주지 않는다.
반면 L1 CA 와 L2 PY의 상관기 종류 및 코드 추적 루프의 대 역폭의 차이로 인해 수신기 다중경로 오차와 노이즈 성분이 위 성마다 의사거리에 미치는 영향이 다르게 된다. 따라서 과 을 추정 후 해당 C1, P1 측정값에서 다중경로와 수신 기 노이즈 성분을 제거하였다.
각 위성에 대하여 식 (7)을 이용해 전체 위성의 를
계산 하고, 최종적으로 전체 위성에 대하여 바이어스 평균을 0 으로 조정하여 식 (8)과 같이 각 위성 간 상대적인 값인 C1P1 DCB를 계산한다.
2-2 위성 C1P1 DCB 추정 결과
실제 야외 신호 데이터를 수집 후 C1P1 DCB를 계산해 보았 다. 2018년 4월 16일에 수집된 24시간 데이터를 이용하였고 결 과 분석을 위해 NASA가 운용중인 CDDIS사이트를 통해서 제 공되는 해당 날짜의 DCB 값을 기준으로 비교 분석하였다.
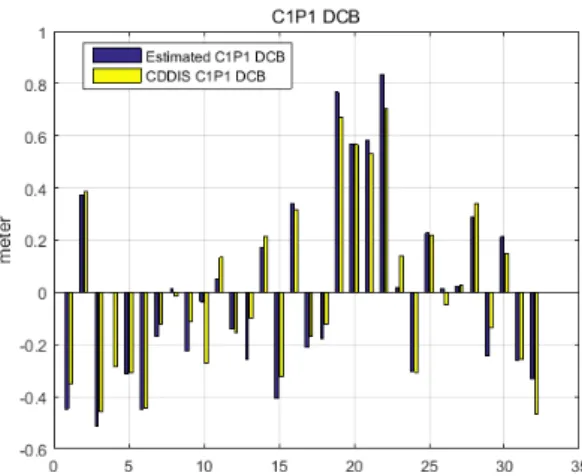
CDDIS에서는 GPS 위성의 각 신호간의 모든 DCB를 일 단위 및 일주일 단위로 계산하여 제공 하고 있다. 그림 4은 CDDIS에 서 제공한 C1P1 DCB와 추정된 C1P1 DCB 값을 도시하였다.
그림 5은 CDDIS의 C1P1 DCB 값과 추정된 C1P1 DCB 값의 차 분 값으로 20 cm 이내에서 잘 추정하고 있는 것을 확인 할 수 있었다. 참고로 4번 위성의 경우 해당 일에 24시간동안 관측 값 이 존재하지 않아 계산 되지 않았다.
그림 4. 추정된 C1P1 DCB 와 CDDIS의 C1P1 DCB Fig. 4. Estimated C1P1 DCB Vs. CDDIS C1P1 DCB.
그림 5. 추정된 C1P1 DCB와 CDDIS C1P1 DCB 차이 Fig. 5. Difference between estimated C1P1 DCB and
CDDIS C1P1 DCB.
Ⅲ. SPS용 보정항법 서비스에 PPS 수신기 적용
본 장에서는 단일 위성항법에 C1P1 DCB를 적용한 결과를 분석 하고 SPS용 보정항법 서비스(차분위성항법 시스템, 광역 보강항법 시스템)를 PPS 수신기에 적용하여 그 결과를 분석하 였다.
3-1 L1 CA 단일 위성항법 수신기에서의 C1P1 DCB 영향
GPS IS(interface specification)-GPS200에는 L1 PY코드 사용 자를 위한 군지연(group delay)의 보정 방법이 나와 있다. 이는 GPS의 위성 Control System이 L1 PY/L2 PY 측정값을 가지고 위성 시계 오차를 계산한다[6]. 이 과정에서 Tgd(timing group delay)에 대한 보정텀이 위성시계 오차에 포함되어 있게 된다.
이는 Control System의 위성 궤도 및 시계 오차를 구하는 칼만 필터에서 이를 분리 하지 않고 위성 시계 오차에 포함시켜 보상 하게 함으로써 좀더 간단하게 구성 할 수 있기 때문이다[7]. 따 라서 L1/L2 측정값을 이용하여 Iono-Free 방식으로 의사거리를 재구성하여 사용하는 경우 재구성된 의사거리에 Tgd 성분과 Ephemeris 데이터의 위성 시계 오차 보정 값에 포함되어 있는 Tgd가 상쇄되어 별도 보상이 필요가 없다. 반면 단일 주파수 PPS 사용자(L1 PY 혹은 L2 PY 사용자)의 경우 Ephemeris 데이 터의 위성 시계 오차 보정값에 Tgd 보정값이 포함 되어 있기 때 문에 Ephemeris 데이터에 포함되어 있는 Tgd 값을 이용해 이에 대한 보상을 하게 된다[8]. 하지만 상용 수신기의 경우 암호화 되어 있는 PY 신호를 사용하지 못하기 때문에 CA 신호를 사용 하는데 민간 L1 CA 사용자는 추가적으로 C1P1 DCB를 제거해 야 보다 정확한 위치해를 계산 할 수 있다[6].
추정된 C1P1 DCB가 위치해에 어떻게 영향을 미치는지 확 인하기 위해 의사거리의 수신기 노이즈 오차 성분을 제외한 모 든 오차가 없다고 가정하고 위치해를 구한 결과와 C1P1 DCB 오차만 추가 하여 위치 오차를 구한 경우에 대해 24 시간 동안 의 위성 배치에 따른 위치 오차를 도시하였다. 시뮬레이션을 위 해 수신기 노이즈 오차를 0.6 m(1)로 가정하였다[9]. 그림 6과 그림 7은 각각 C1P1 DCB 조정 전과 후의 수평 오차에 대한 모 의실험 결과이다.
그림 6 과 그림 7에서 알 수 있듯이 C1P1 DCB 오차가 있는 경우 수평오차에 약간의 바이어스가 있는 것을 확인할 수 있다.
표 1에 C1P1 DCB 적용 전/후의 수평 오차와 수직 오차 결과 값 을 정리하였다. C1P1 DCB 오차가 있는 경우 수평 오차 CEP(circular error probable) 0.5233 m, 수직오차 PE(probable error) 0.6101 m 정도이고 C1P1 DCB를 보정하였을 경우 수평 오차 CEP 0.4641 m, 수직 오차 PE 0.5620 m 개선되는 것을 확 인 할 수 있다. 비율로 보면 수평 11.31%, 수직 7.88%정도 개선 되었다. 하지만 실제 수신기에서는 측정값에 다른 오차 성분 (이온층 지연, 대류층 지연, 위성 시계 및 궤도 오차, 다중경로 등)이 C1P1 DCB 보다 더 크기 때문에 C1P1 DCB의 영향이 이 보다 훨씬 작게 반영이 되거나 영향이 미치지 않는 것처럼 보일
수 있다.
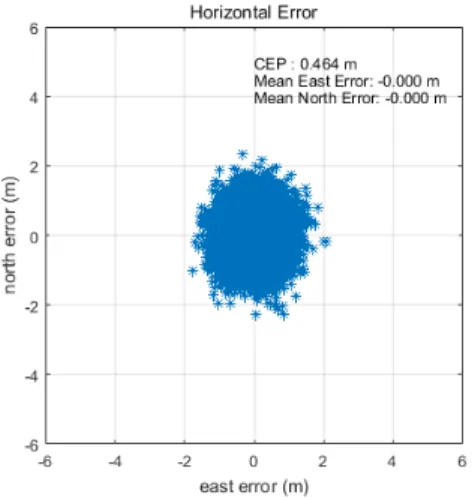
실제 야외 신호 환경에서 미치는 영향을 알아보기 위해 C1P1 DCB를 L1 CA 측정값에 보정하여 위치해를 계산해 보았 다. 그림 8과 그림 9는 노바텔 수신기를 통해 수집한 24시간데 이터를 이용해 위치해를 계산 시 C1P1 DCB를 반영하지 않은 경우와 추정된 C1P1 DCB를 반영한 경우에 대한 수평 오차 결 과이다.
표 2에서 보듯이 모의시험 결과와 달리 실제 신호에서는 수 평 오차의 경우 C1P1 DCB를 보정안한 결과대비 보정한 결과 는 약 7.58% 정도 개선되었고 수직 오차는 1.34% 열화 되는 것 을 확인하였다. 모의시험 결과와 다른 이유는 C1P1 DCB 오차 성분 보다 다른 오차 성분에 의한 바이어스가 위치 오차에 더 영향을 주기 때문이다. 하지만 오차를 제거할 수 있는 보정 항 법의 경우 시뮬레이션처럼 C1P1의 영향이 상대적으로 크게 나 타난다.
그림 6. 수평 오차(C1P1 DCB 보정 전)
Fig. 6. Horizontal error(before C1P1 DCB correction).
그림 7. 수평 오차(C1P1 DCB 보정 후 )
Fig. 7. Horizontal error(after C1P1 DCB correction).
표 1. C1P1 DCB 보정 전/후 수평/수직 오차 시뮬레이션 Table 1. Horizontal & vertical error simulation on C1P1
DCB.
Before DCB Correction(m)
After C1P1 DCB Correction(m)
(Before-After) /Before (%)
Horizontal CEP 0.5233 0.4641 11.31
Vertical PE 0.6101 0.5620 7.88
그림 8. 단일 위성항법 수평 오차(C1P1 DCB 보정 전) Fig. 8. Standalone horizontal error(before C1P1 DCB
correction).
그림 9. 단일 위성 항법 수평 오차(C1P1 DCB 보정 후) Fig. 9. Standalone horizontal error(after C1P1 DCB
correction).
표 2. C1P1 DCB 보정 전/후 수평/수직 오차
Table. 2. Horizontal & vertical error on C1P1 DCB.
Before DCB Correction(m)
After C1P1 DCB Correction(m)
(Before-After) /Before (%)
Horizontal CEP 1.0728 0.9914 7.58
Vertical PE 1.8386 1.8636 -1.35
3-2 SPS 차분위성항법시스템에 PPS 수신기 적용
SPS용 차분위성항법시스템에서 생성된 보정 데이터를 PPS 수신기에 적용하는 경우에 대해 분석하였다. 차분위성항법 시 스템에서는 기준국 수신기와 사용자 수신기간의 공통 오차 성 분이 아닌 성분은 제거 될 수 없으므로 C1P1 DCB 추정 때와는 다르게 C1 및 P1 의사거리를 각각 식 (9)과 식 (10)으로 모델링 하였다. SPS 수신기 의사거리를 이용해 만든 보정 값을 식 (11) 로 계산된다. PPS 사용자가 SPS용 보정 데이터를 이용해 의사 거리를 보정할 경우 식 (12)처럼 C1P1 바이어스 성분이 남게 되 기 때문에 C1P1 바이어스를 보상해야한다.
(9)
(10)
(11)
(12)
GPS 수신기를 이용해 24시간동안 같은 안테나를 통해 수신 된 SPS 수신기 데이터와 PPS 수신기 데이터를 수집하였다.
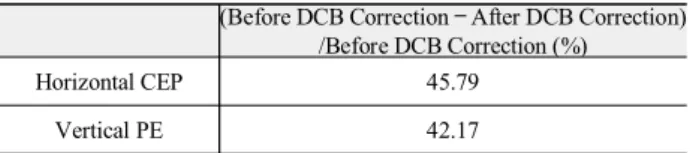
SPS용 보정데이터를 PPS 측정값에 보정하여 위치해 계산 후 수평/수직 오차 개선 정도에 대해 표 3에 정리하였다. 결과에 서 보듯이 C1P1 DCB를 보정 안한 경우 대비 보정한 경우 수평/
수직 오차는 각각 45.79%, 42.17% 개선되는 것을 확인하였다.
앞에서 언급했듯이 단일 위성항법 결과보다 차분위성항법 시스템에서 C1P1 DCB 오차의 영향이 분명하게 나타나는 것을 확인하였다. 이는 다른 오차 성분이 제거됨에 따라 C1P1 DCB 의 오차 성분이 주된 오차 요인으로 작용하기 때문이다.
SPS용 보정 데이터 시스템에서 C1P1 DCB를 보낼 수 있는 지 차분위성항법 표준 포맷인 RTCM(radio technical commission for maritime services)을 살펴보았다. RTCM 버전 2.3에는 메시지 11번이 P코드용 보정 데이터 항목으로 예약되 어 있다. 별도의 C1P1 DCB용으로 메시지 할당은 없다. 반면 RTCM 버전 3.0 에는 C1와 P1간의 상대적인 DCB 형태가 아닌 C1, P1등 각 신호의 절대적인 신호 지연값을 보정 값으로 제공 할 수 있게 메시지(Message type 1065)를 할당해 놓았다[10]. 따 라서 3.0 버전을 통해 각 신호의 지연 정보를 보냄으로써 적용 가능하다.
표 3. C1P1 DCB 적용 전 대비 적용 후 위치해 개선율 (차분위성항법)
Table 3. Improvement rate after C1P1 DCB correction (DGPS).
(Before DCB Correction – After DCB Correction) /Before DCB Correction (%)
Horizontal CEP 45.79
Vertical PE 42.17
3-3 SPS 광역보강항법 시스템에 PPS 수신기 적용
SPS용 광역보강항법 시스템을 PPS 수신기에 적용하기 위해 서는 차분 위성 항법 시스템과 같이 SPS용 보정 데이터 외에 C1P1 DCB를 보정해야 한다. 하지만 현재 운용중인 SPS용 광 역보강항법 시스템에는 C1P1 DCB에 대한 보정 정보를 제공하 는 메시지가 없다. 따라서 SPS용 광역보강항법 시스템에 적용 하기 위해서는 추가 메시지를 구성해서 스케줄러를 통해 일정 주기 마다 전송해야 한다. C1P1 DCB의 경우 거의 변하지 않으 므로 전송 주기가 늦어도 되지만 PPS 수신기가 광역보강정보 를 이용해 정확한 위치를 보다 빨리 계산하기 위해서는 가장 주 기가 긴 이온층 보정 정보와 동일한 주기로 보내 주도록 구성하 였다. 이온층 정보가 모두 수신되기 전까지 광역보강정보를 이 용해 위치해를 계산 할 수 없기 때문이다. 따라서 전송주기는 300초로 설정하였다.
전송 되는 메시지구조는 RTCA MOPS DO-229D 표준 포맷 을 따르도록 구성하였다[11]. 새로 추가된 메시지 구조는 그림 10와 같다. 해당 위성에 대한 C1P1 DCB 구분은 message type 2-5처럼 같은 IODP(issue of data PRN)를 가지는 PRN(pseudo random number) mask를 이용한다.
본 논문에서는 PPS 수신기에 광역보강항법 성능을 분석하 기 위해 광역보강항법 시스템 모의 소프트웨어를 구성하였다.
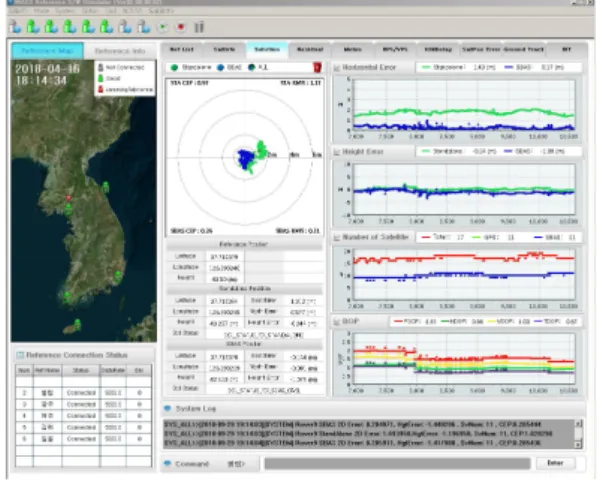
광역보강항법 시스템 모의 소프트웨어는 그림 11와 그림 12와 같이 GPS 관측기준국 모의기 소프트웨어와 중앙 처리국 모의 기 소프트웨어로 구성되어 있다. 광역보강항법 시스템 모의기 소프트웨어 구성도는 그림 13과 같다 .
GPS 관측기준국 모의기 소프트웨어는 관측기준국의 RINEX(receiver independent exchange format) 파일을 입력 받 아서 전처리 후 중앙 처리국으로 원시데이터를 전송 해주는 역 할을 수행한다. 또한 중앙 처리국에서 생성된 보정 데이터를 이 용해 기준국 원시 데이터에 적용해 기준국에서의 보정 항법을 수행하고 결과를 도시하는 역할을 수행 하다. 추가적으로 별도 의 사용자수신기의 RINEX를 입력받아 사용자 수신기에서의 보정 항법도 수행 가능하게 구현하였다. 본 논문에서는 관측기 준국 RINEX는 국토 지리원 5개소 데이터(강화, 진도, 제주, 부 산, 저진)를 이용하였다. 사용자 수신기는 대전 지역에 SPS/PPS 수신기는 설치하여 성능 검증을 위해 사용하였다.
중앙 처리국 모의기는 관측기준국 모의기에서 전송한 5개소 기준국 데이터를 이용하여 국방과학연구소에서 개발한 보강 데이터 생성 알고리즘을 수행 후 최종 보강 메시지를 생성한다.
보강 데이터 생성 알고리즘은 크게 이온층 격자지연(GIVD:
grid ionosphere vertical delay) 및 GIVE(grid ionosphere vertical error)를 추정 하는 부분, 위성 궤도 및 시계 오차를 추정하는 부 분, C1P1 DCB에 대한 추정 부분으로 구성된다. C1P1 DCB를 사용하기 위해서는 미리 장입해 놓은 값을 이용하거나 24시간 이상 시뮬레이션을 수행 시 24시간 이후부터는 추정 값으로 업 데이트 된 C1P1 DCB를 파라미터를 적용하게 된다. 이렇게 생 성된 파라미터 데이터는 메시지 생성기를 통해 파라미터를 메
시지화 하고 스케줄러를 통해 정해진 주기로 데이터를 전송하 도록 구현되었다. 최종 생성된 메시지는 관측기준국 모의기로 전송된다.
본 논문에서는 2장에서 추정된 C1P1 DCB를 중앙 처리국 모 의기 소프트웨어에 장입하여 보강 메시지를 생성 후 관측기준 국 모의기로 전송하고 관측기준국 모의기에서 PPS 측정값에 SPS용 보정 값과 C1P1 DCB를 모두 적용하여 24시간 동안의 광역보강항법 시스템의 성능을 분석하였다. 수평/수직 오차 개 선 정도는 표 4에 정리하였다. 표 4에서 보듯이 C1P1 DCB를 보 정 안한 경우 대비 보정한 경우 수평/수직 오차는 각각 35.20%, 27.43% 정도 개선되는 것을 확인하였다.
그림 10. C1P1 DCB 메시지 포맷 예시
Fig. 10. C1P1 DCB message format example.
그림 11. GPS 관측기준국 모의기 소프트웨어 Fig. 11. GPS reference station simulation SW.
그림 12. 중앙 처리국 모의기 소프트웨어 Fig. 12. Central processing simulation SW.
그림 13. PPS 광역보강항법 시스템 모의기 구성 블럭도 Fig. 13. PPS wide area augmentation system simulation
configuration block diagram.
표 4. C1P1 DCB 적용 전 대비 적용 후 위치해 개선율 (광역보강항법 시스템)
Table 4. Improvement rate after C1P1 DCB correction (Wide area augmentation system).
(Before DCB Correction – After DCB Correction) /Before DCB Correction (%)
Horizontal CEP 35.20
Vertical PE 27.43
Ⅳ. 결 론
본 논문에서는 SPS용 보정 항법 시스템(차분위성항법 시스 템, 광역보강항법 시스템)을 PPS 수신기에 적용하기 위해 필요 한 C1P1 DCB 추정 방법과 추정된 결과를 이용해 단일 위성 항 법 및 보정 항법에서의 C1P1 DCB에 대한 영향을 분석하였다.
단일 위성 항법 같은 경우 C1P1 DCB의 오차 성분 보다 다른 오 차 성분(이온층, 대류층, 위성 및 시계 오차)이 더 크게 영향을 미치기 때문에 보정을 해도 개선 정도가 크지 않는 것을 확인하 였다. 반면 SPS용 차분 위성 항법 시스템과 광역보강항법 시스 템을 PPS 수신기에 적용 시 C1P1 DCB 보정하는 경우 상대적 인 위치해 개선 정도가 크게 발생하는 것을 확인하였다. 기저선 (기준국과 사용자 사이의 거리) 이 0인 경우의 차분 위성항법 시스템의 경우 오차가 다 제거되고 C1P1 DCB에 대한 오차와 수신기 노이즈만 반영이 되기 때문에 광역보강항법 시스템보 다 상대적인 위치해 개선 정도가 더 큰 것을 확인 할 수 있었다.
또한 광역보강항법 시스템에서 C1P1 DCB의 전송을 위한 추가 메시지를 구성하여 전송함으로써 별도의 PPS용 보정 항법 시 스템을 구성 할 필요가 없음을 확인하였다. 즉 SPS용 보강 메시 지는 그대로 전송하여 SPS 사용자가 사용하고, PPS 사용자의 경우 추가된 C1P1 DCB 메시지 수신을 통해 PPS 사용자도 SPS 용 보강 항법 시스템을 활용 할 수 있다. 향후 SPS용 보정 항법 시스템에 PPS 수신기를 적용 시 본 연구 결과가 활용 될 수 있 을 것으로 예상된다.
Acknowledgments
본 연구는 국방과학연구소의 핵심기술과제 ‘위성항법 성능 향상을 위한 보강정보 생성 기술’의 일환으로 수행되었습니다.
References
[1] A. El-Rabbany, GPS errors and biases, in Introduction to GPS,1th ed. Norwood, MA: Artech House Pub., ch. 3, pp.
36-38, 1993.
[2] A. Tetewsky, J. Ross, A. Soltz, N. Vaughn, J. Anszperger, C.
O'brien, D. Graham, D. Craig, and J. Lozow, “Making sense of inter-signal corrections,” Inside GNSS, pp. 37-38, Jul./Aug. 2009.
[3] S. Schaer, “Differential code biases(DCB) in GNSS analysis,”, in IGS Analysis Center Workshop, Miami: FL, Jun. 2008. [Internet]. Available: https://www.ngs.noaa.
gov/IGSWorkshop2008/prog.html
[4] United states coast guard navigation center, GPS constellation status, [Internet]. Available: https:// www.
navcen.uscg.gov/?Do=constellationstatus
[5] G. E. Vázquez, R. Bennett, and J. Spinler, “Assessment of pseudorange multipath at continuous GPS stations in Mexico,”, Positioning, Vol. 4, No. 3, pp 253-265, 2013
[6] R. Muellerschoen, and E. Powers, “Error in GPS due to satellite C1-P1 code bias,” [paper ID: 20060034246] in Performance Analysis Working Group, Colorado Springs: CO, Sep. 1999.
[7] D. Matsakis, “The timing group delay(TGD) correction and GPS timing biases,” in Proceedings of the 63rdAnnual Meeting of the Institute of Navigation, Cambridge: MA, pp. 49-54, 2007.
[8] M. J. Dunn, Global positioning systems directorate systems engineering & integration-interface specification IS-GPS- 200H, GPS Gov, pp. 97-99, Sep. 2013. [Internet]. Available:
https://www.gps.gov/technical/icwg/
[9] M. Shaw, K. Sandhoo, and D. Turner, “Modernization of the global positioning system,” GPS World, Vol. 11, No. 9, pp.
36-44, Sep. 2000.
[10] RTCM Special Committee No. 104, Differential GNSS(global navigation satellite systems) service version 3, Radio Technical Commission for Maritime Services, Arlington: VA, RTCM standard 10403.2, pp. 182-183, Jul.
2013.
[11] Minimum operational performance standards for global positioning system/satellite-based augmentation system airborne equipment, RTCA Inc., Washington D.C., RTCA DO-229D, Feb. 2013.
부 성 춘 (Sung-Chun Bu)
2002년 2월 : 건국대학교 전자정보통신공학과 (공학사) 2004년 8월 : 건국대학교 전자정보통신공학과 (공학석사) 2005년 8월 – 207년 3월 : 토필드 연구원
2007년 4월 – 2011년 3월 : 코아로직 선임 연구원 2011년 4월 – 현재 : LIG넥스원 선임연구원
※관심분야 : 광역보강시스템, 위성항법수신기
소 형 민 (Hyoung-Min So)
2001년 2월 : 고려대학교 기계공학과 (공학사) 2003년 9월 : 서울대학교 기계항공공학부 (공학석사) 2009년 9월 : 서울대학교 기계항공공학부 (공학박사) 2011년 1월 ~ 현재 : 국방과학연구소 선임연구원
※관심분야 : 위성항법시스템, 광역보강시스템, 위성항법수신기
김 갑 진 (Kap-Jin Kim)
1995년 2월 : 한양대학교 제어계측공학과 (공학사) 1997년 6월 : 한양대학교 제어계측공학과 (공학석사) 1997년 7월 ~2001년 6월: LG산전 주임연구원 2001년 7월 ~ 현재 : 국방과학연구소 책임연구원
※관심분야 : 위성항법 및 항법전 관련 기술
이 철 수 (Chul-Soo Lee)
2000년 2월 : 한양대학교 전자공학과 (공학사) 2002년 8월 : KAIST 전기 및 전자공학과 (공학석사) 2002년 ~2007년 : ETRI, 연구원
2010년 8월 : 충남대학교 전자전파정보통신공학과 (공학박사) 2010년 9월 ~ 현재 : LIG넥스원, 수석연구원
※관심분야 : 통신 시스템 및 신호처리, 위성항법, 보정항법 김 도 경 (Do-Kyoung Kim)
1996년 2월 : 한국항공대학교 통신정보공학과 (공학사) 2016년 2월 : 고려대학교 국방기술경영 (경영학석사) 2009년 3월 ~ 현재 : LIG넥스원, 수석연구원
※관심분야 : 통신공학, 무선 이동통신
고 요 한 (Yo-Han Ko)
2005년 2월 : 중앙대학교 전자전기공학부 (공학사) 2007년 2월 : 중앙대학교 전자전기공학부 (공학석사) 2011년 2월 : 중앙대학교 전자전기공학부 (공학박사) 2011년 1월 ~ 현재 : LIG넥스원, 수석연구원
※관심분야 : MIMI-OFDM, 항법 시스템, 능동 배열 안테나