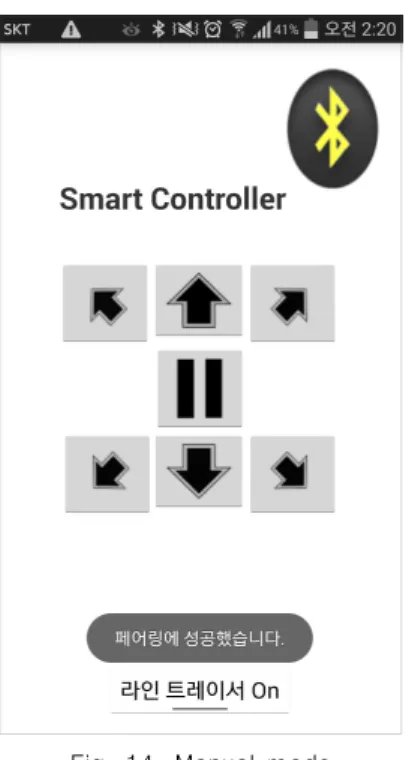
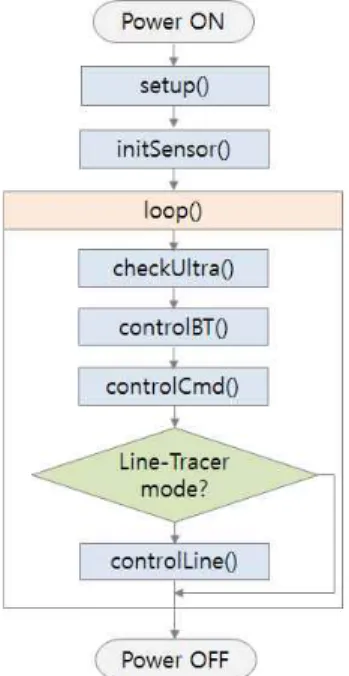
A Design and Implementation of Control Application for Arduino Prime Smart Car
1)
전체 글
1)
수치



관련 문서
Should a module be used with any of the absolute maximum ratings exceeded, the characteristics of the module may not be recovered, or in an extreme case, the module
In keypad control mode, following parameters can be set: pump displays speed or flow rate, pump state when power on (stop or run), automatic keypad lock and simple
Only after you press the POWER (ON/STAND BY) button on the pro- jector cabinet or the remote control for a minimum of 2 seconds will the power indicator turn to green and
(4) After a certain period of tightening time with tightening torque, Z-axis and rotating axis return in positioning control mode to the retracted
This solution includes Smart Monitoring, which checks the status of miners and the mining in real-time, and provides the information necessary for optimal decision
1. In Control Panel, double-click the System icon. You see the System Properties window.. In System Properties, click the Hardware tab, then click on the Device Manager
The findings showed that the environment education program using the developed Arduino was effective in enhancing environmental literacy and creative
Therefore, the execution of Eco-STEAM program using Arduino can expect the students’ changes in perception of environmental problems, motivation for them