* 서울과학기술대학교 기계・자동차공학과
+ 교신저자, 여주대학교 자동차과 ([email protected])
주소: 469-705 경기도 여주군 여주읍 세종로 338 여주대학교 자동차과
하이브리드 차량용 클러치 자동화 기구의 특성 연구
임원식*, 박성천+
(Manuscript received: Jul, 2, 2012 / Revised: Aug, 3, 2012 / Accepted: Aug, 6, 2012)
A Study on the Characteristics of the Clutch Automation Mechanism of Hybrid Vehicles
Won-sik Lim*, Sung-cheon Park+
Abstract
Due to the increase of oil price, the needs of the reduction of the fuel cost is rising. Therefore, necessity of hybrid vehicle that runs with engine and the electric motor is on the rise. In order to improve the performance of hybrid vehicle, many researches is carried out. Hybrid vehicles have been developed with the various layout such as serial type, parallel type, power split type, and multi-mode type. The multi-mode hybrid vehicles are designed to show the efficient driving characteristics at low speed and high speed. But the multi-mode system have the problem such as frequent clutch engagement. Frequent clutch engagement causes the shock of vehicles, and the shock inhibits the ride comfort. In this study, automation mechanism of clutch operation is proposed to mitigate the shock at engaging clutch. For this purpose, the dynamic characteristics of motor control is numerically analyzed by using Matlab/Simulink.
Key Words : Clutch(클러치), Hybrid vehicle(하이브리드 차량), Serial type(직렬형), Parallel type(병렬형), Power split type(동력 분기형), Multi-mode type(멀티모드형)
Nomenclature
F : Force, N
α: pressure angle, rad z : number of gear tooth R : pitch radius of gear, m
rp: rotating radius of stud bearing, m t : time, sec
ω: angular velocity, rad/sec
Y: displacement, m J : Inertia, kg・m2
Subscripts
A: Release Gear B : Actuator Gear C : Idle Gear
Fig. 1 Modeling of Multi-mode Hybrid System
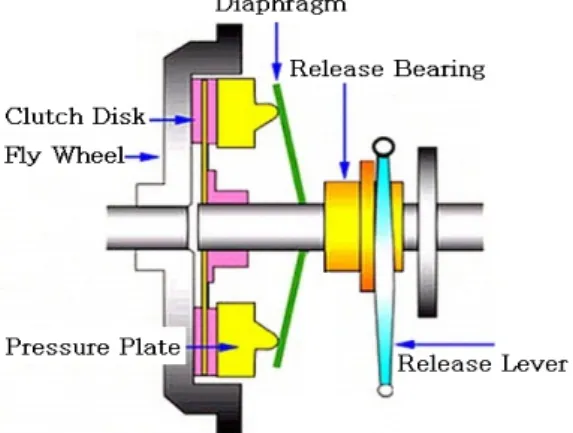
Fig. 2 Configuration of Clutch
1. 서 론
지구 온난화에 따른 여러 문제점이 발생되고, 유가 상승에 의한 연비저감의 필요성이 나날이 높아지고 있다. 온실가스 배 출량 세계 6위, 1인당 배출량 기준 세계 9위인 우리나라 역시 온실가스 강제 의무 감축국에 포함될 것을 예측하는 분위기 이 다. 이와 같은 분위기에서 온실가스 배출의 17%를 차지하는 자동차에 대한 관심 또한 높아질 수 밖에 없다.
차량의 온실가스 감축을 위한 일환으로 디젤기관과 같은 고 효율 엔진 차량과 전기차와 같은 배기가스 저배출 차량에 관한 연구가 이루어지고 있다(1). 그러나 디젤기관의 경우 연소 특성 상 NOx와 PM의 발생을 동반하며, 전기차의 경우 충전 등의 불편한 점을 갖고 있다. 이에 따라 엔진과 모터를 구동원으로 하는 하이브리드 차량에 대한 필요성이 더욱 대두되고 많은 연 구가 이루어지고 있다(2,3).
하이브리드 차량은 병렬형, 직렬형, 동력분기형 등 다양한 형 태로 발전되어 왔는데, 본 연구에서는 두 개 이상의 모드를 구 현할 수 있는 멀티모드 하이브리드 구동 시스템을 연구대상으 로 고려하였으며, Fig. 1에 멀티모드형 차량의 개략도를 나타 내었다. Fig. 1에서와 같이 동력분기 변속시스템에는 엔진 또 는 모터로부터 독립된 동력을 공급받도록 설계되었다. 본 연구 에서는 엔진과 동력분기변속시스템의 사이에 장착되어 있는 클러치 시스템의 제어메카니즘에 대해 고찰하고자하며 변속시 스템 내부의 구체적 형상과 기능은 고려하지 않기로 하였다.
멀티모드 하이브리드 차량은 저속과 고속에서 각각의 효율이
우수한 구동시스템을 작동시키도록 설계되어 있다. 즉, 저속에 서는 모터를 구동시키고, 고속에서는 엔진을 클러치와 브레이 크의 조합을 통하여 모드 변환을 하고 있어 엔진 클러치의 작동 이 빈번히 발생이 된다. 이와 같은 클러치의 분리/결합 과정에 서 발생하는 충격이 승차감을 저해하는 원인이 된다. Fig. 2에 기존의 다이어프램식 클러치 구조를 나타내었다.
클러치 페달을 밟게 되면 릴리스 레버가 좌측으로 이동하여 릴리스 베어링을 좌측으로 이동시켜 다이어프램을 누르게 되 고, 다이어프램에 의해 구속되어 있던 압력판이 클러치 디스크 로부터 분리되어 엔진의 동력이 차단되게 된다. 동력 전달은 반대의 방향으로 릴리스 레버가 우측으로 이동하면서 다이어 프램이 압력판을 누르게 되고, 클러치 디스크가 플리이 휠과 결합하게 된다. 이 과정에서 클러치 분리/결합시 필요한 다이어 프램의 이동거리에 따른 힘이 직선적이지 않고 곡선의 형태를 갖기 때문에 클러치 분리/결합에 따른 충격이 따르게 된다. 특 히 클러치 분리시보다 결합시 발생하는 충격이 승차감 저해 요 인이 된다. 클러치 성능 분석에 관한 연구는 다수 이루어 졌으
나(4~7) 클러치에 의해 발생하는 충격 저감 연구는 미흡한 상황
이다. 따라서 본 연구에서는 클러치의 결합과 분리를 자동화 하여 클러치 결합/분리시 충격을 저감하기 위한 자동화 메카니 즘을 제안 하고자 한다. 특히 엔진과 동력분기 변속기어열 사이 에 존재하는 건식클러치의 자동화 메카니즘의 제어특성에 대 해서 자세히 분석하고자 한다.
2. 시스템 모델링
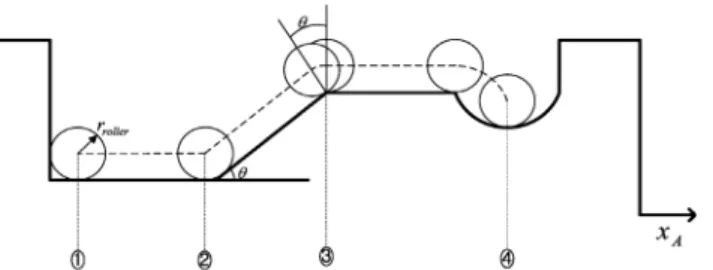
클러치 자동화 작동원리는 다음과 같다. 모터 액추에이터를 구동시켜 릴리스 포크 플레이트를 회전하여 스터드 베어링을 작동시키게 된다. 스터드 베어링이 릴리스 플레이트 경사면을 따라서 이동하면서 릴리스 플레이트를 누르게 된다. 릴리스 플 레이트가 눌리고 클러치가 분리되면서 동력을 차단하게 된다.
건식 클러치 결합/분리시 충격이 발생하여 운전자에게 불쾌 감을 느끼게 할 수 있다. 따라서 클러치 결합/분리시 충격 저감 을 위하여 감속기가 장착된 DC모터를 사용하여 결합되는 순간 에 릴리스 플레이트 액튜에이터의 작동 속도를 제어함으로써 충격을 저감시킨다.
Fig. 3은 앞서 설명한 클러치 자동화 시스템의 스터드 베어링 이 릴리스 플레이트의 위를 움직이는 형상을 모델링 한 것이고, Fig. 4는 본 연구 대상 클러치의 릴리스 플레이트의 리프트 양 의 변화를 표현하고 있다.
Fig. 4에서 ➀ ~ ➃구역의 운동에 대한 시간에 따른 변위를 나타내었다. ➁ ~ ➂구역은 릴리스 하중이 가해지며 릴리스 플레이트가 압축 변형되는 구역이라고 할 수 있다. ②→③ 구 역은 릴리스 하중에 의하여 릴리스 플레이트를 압축 변형시키 고 클러치를 분리하는 영역이고, ③→② 구역은 릴리스 하중
Fig. 3 Movement of Stud Bearing on the Release Plate
Fig. 4 Operation Diagram of Release Plate
Fig. 5 Mathematical Modeling of Release Operation Diagram
Fig. 6 Release load of Actuator
Fig. 7 Dynamic Modeling of Gears 을 감소시켜 릴리스 플레이트를 복원시키고 클러치를 결합하
는 영역이다. 따라서 클러치가 분리되는 ②→③ 구역의 제어 특성은 연구 범위에서 제외하고 주로 클러치가 결합하는 ③→
② 구역에서의 클러치 제어에 대하여 고려하였다.
➁↔➂구역에서 나타나는 클러치의 분리 및 결합 특성을 묘 사하기 위해 클러치 슬립 속도의 제어 목표를 Fig. 5와 같이 고려하였다.
Fig. 5의 x와 y는 정규화된 시간과 정규화된 릴리스 변위를 나타내고 있다. x는 시간 와 연동되고, y는 실제 릴리스 변위
∆와 연동된다고 생각한다. Fig. 5에 나타나 있는 릴리스 작 동 선도의 개형은 다음과 같이 3차 함수로 표현될 수 있다. 이 특성 선도는 식 (1)과 같은 조건식을 만족하여야 한다.
≤ ≤
′ ′
′ ′
(1)
본 연구에서는 슬립 영역의 양끝에서의 슬립목표 속도를 입 력받아 클러치 슬립 속도 목표 패턴을 결정하는 방식을 사용하 였다.
앞에서 제시되는 제어목표를 달성하기 위해서 감속기를 내장 한 모터 구동부를 설계하였다. 이때 제어구동부의 필요 구동력 을 선정하기 위하여 먼저 클러치의 클램프 하중 특성을 Fig.
Fig. 8 Performance Simulator of Clutch-Automation System
Fig. 9 Subsystem for the Modeling of Clamp-Release Motion
Fig. 10 Subsystem for the Setting Motor Speed
Fig. 11 Subsystem for the Setting Force and Torque of Gears
Table 1 Input Value of Control Parameter
No Input Value
1 Actuator operation time, 1.4sec
2 Initial release lever speed(disengaging), variable 3 Final release lever speed(disengaging), variable 4 Initial release lever speed(engaging), variable 5 Final release lever speed(engaging), variable 6 Release travel increment(disengaging), 7mm 7 Release travel increment(engaging), 7mm 8 Release gap, 0.2mm
9 Rotational speed of plate A at no load, variable 6과 같이 고려하였다.
감속기를 포함한 모터 구동부의 작용력을 결정하기 위하여 Fig. 7과 같이 기어 작동부를 자세히 모델링하였다.
그림에서 액추에이터 기어 (B), 이이들 기어 (C), 릴리스 기 어 (A)에 걸리는 힘들(FA, FB)이 잘 표현되어 있다. 또한 기어 들의 잇수와 속도 그리고 관성들도 그림에 표현되어 있다. 기어 들은 압력각이 존재하므로 물려 돌아가는 한 쌍의 기어들은 서 로 미는 힘들(FAn, FBn)이 작용한다. 이상의 기어들에 작용하는 운동 방정식을 정리하면 다음과 같다.
tan, tan (2)
,
(3)
(4)
(5)
(6)
3. 성능 분석
클러치 자동화를 위하여 제안된 기구의 제어 특성을 분석하 고 최적의 제어 알고리즘을 개발하기 위하여 Matlab/Simulink 환경의 건식클러치의 성능 시뮬레이터를 구축하였다.
3.1 건식클러치의 성능 시뮬레이터 구축
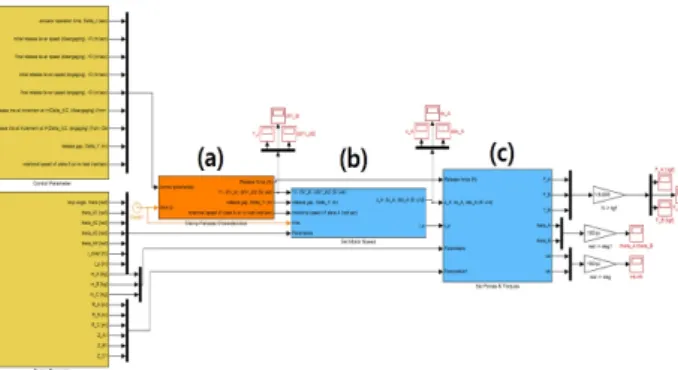
모터 토크를 계산하기 위하여 시뮬레이터를 구축하였으며, Matlab/Simulink을 이용하여 구현된 클러치 자동화 성능 시뮬 레이터의 전체 모델링을 Fig. 8에 나타내었고, Fig. 8의 (a)는 클램프 릴리스의 형상 모델링을 위한 서브시스템이고, (b)는 모 터 속도를 설정하기 위한 서브시스템 이며, (c)는 각 기어에 걸 리는 힘과 토크를 결정하기 위한 서브시스템 이다. 각각의 서브
시스템을 Fig. 9, 10, 11에 나타내었다. Table 1, 2에는 Fig.
8의 시뮬레이터에 입력할 수 있는 변수를 나열하였다.
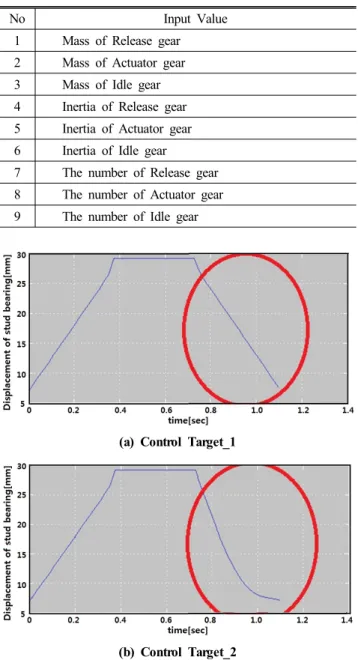
Table 2 Input Value of Design Parameter
No Input Value
1 Mass of Release gear 2 Mass of Actuator gear 3 Mass of Idle gear 4 Inertia of Release gear 5 Inertia of Actuator gear 6 Inertia of Idle gear
7 The number of Release gear 8 The number of Actuator gear 9 The number of Idle gear
(a) Control Target_1
(b) Control Target_2
Fig. 12 Control Target According to Release Displacement
(a) Control Result_1
(b) Control Result_2
Fig. 13 Motor Driving Torque According to Release Displacement
3.2 시뮬레이터 결과 분석
Fig. 12(a)는 클러치 결합 과정시(Fig. 4의 ③→②), 거의 일 정한 속도로 릴리스 플레이트를 결합하는 경우 나타나는 값의 거동을 표현하고 있다. 이와 비교하여 Fig. 12(b)는 클러 치 결합 과정시(Fig. 4의 ③→②), 결합 직전의 속도를 줄여 클러치를 부드럽게 결합하고자 하는 경우 나타나는 값의 거동을 표현하고 있다.
이 두 경우의 거동을 목표로 구동 모터가 제어되는 경우 필요 로 하는 모터 토크의 값이 Fig. 13(a)와 Fig. 13(b)로 나타나 있다. 결과를 통해 클러치를 부드럽게 결합하는 경우 모터 토크 의 값 또한 비례적으로 줄어드는 것을 확인할 수 있다. 본 연구
에서 개발한 성능 시뮬레이터를 이용하면, 클러치를 부드럽게 결합하기 위하여 릴리스 변위의 목표 패턴을 임의의 모양으로 변경하는 경우, 목표 변위를 추종하기 위한 모터 구동 토크의 구체적인 값을 신뢰성 있게 구할 수 있다.
4. 결 론
본 연구에서는 두 개 이상의 모드를 구현할 수 있는 멀티모드 하이브리드 차량용 건식클러치 자동화를 위한 모터 토크를 계 산하기 위하여 Matlab/Simulink를 통해 메카니즘 특성을 분석 하였다.
(1) 2개 이상 모드를 구현 할 수 있는 멀티모드 하이브리드 차 량에 빈번한 클러치 사용으로 인하여 발생되는 충격을 감 소할수 있는 제어 시뮬레이터를 제안하였다.
(2) 개발된 성능 시뮬레이터를 이용하여 클러치가 결합 되는 슬립 영역에서의 슬립 목표 속도를 제어함으로써 모터에 가해지는 부하 토크를 줄이는 결과를 도출할 수 있었다.
본 연구의 결과는 멀티모드 하이브리드 자동차의 클러치 결 합 충격을 감소 시켜 자동차의 제어 전략 개발에 활용 될 수 있을 것으로 사료된다.
후 기
이 연구는 서울과학기술대학교 교내 학술연구비 지원으로 수 행되었습니다.
References
(1) Kil, B. S., Cho, C. P., Pyo, Y. D., and Kim, G. C., 2010, “Optimized Strategy of Neighborhood Electric Vehicle with Driving Schedules,” Transaction of KSAE, Vol. 18, No. 3, pp. 53~59.
(2) Park, S. M., Park, J. N., and Lim, H. S., 2006,
“Experimental Investigation for Fuel Efficiency and Performance of Diesel Hybrid Electric Vehicle,” KSAE 2066 Fall Conference, pp. 1603~1610.
(3) Yasuhiro, M., Hideo, K., Hiroki, I., and Takayuki, O., 2004, “Development of New Generation Hybrid System,”
SAE paper, No. 2004-01-0643.
(4) Kim, S. M., Kim, M. S., Shin, C. W., Lim, W. S., and Cha, S. W., 2011, “Development of Contact Point Estimation Algorithm of Dry type Clutch with Considering the Friction Pad Wear,” Korea Society of Manufacturing Technology Engineers, Vol. 20, No. 6, pp. 692~696.
(5) Kim, M. S., Shin, C. W., Zheng, C. H., Lim, W. S., and Cha, S. W., 2011, “Development of Clutch Contact Point Estimation Learning Control with Dry Clutch Characteristics,” KSAE 2011 Conference, pp. 773~776.
(6) Kim, B. S., Kim, Y. S., Lim, W. S., Cha, S. W., Ahn, S. H., and Jang, J. D., 2009, “Slip Control Methods of Torque Converter Clutch for Improving Fuel Consumption,”
KSAE 2009 Conference, pp. 730~734.
(7) Kim, O. H., Kim, S. K., and Lim, W. S., 2010, “A study on the Performance Model of Dry-type Clutch with considering the Wear Effect of Friction Plate,”
KSAE 2011 Conference, pp. 1659~1662.