SLI와 벡터 지도 간 합성을 위한 대응 건물 객체 탐색에 관한 연구 A Study on the Building Object Correspondence Between SLI and
Vector Map for Conflation
*
가칠오*ㆍ노건일**ㆍ허 용***ㆍ이정호****ㆍ유기윤*****
Ga, Chill OㆍRho, Gon Il Huh, YongㆍLee, Jeung HoㆍYu, Ki Yun
要 旨
실세계 거리에 대하여 풍부한 시각적 정보를 포함하고 있는 구글 스트리트뷰 등의 위치기반 파노라마 영상 (Street-Level Imagery, SLI) 서비스는 타 공간정보 데이터셋과 합성을 통하여 그 활용성이 더욱 향상될 수 있다. 본 연구에서는 이러한 목적을 위해 주요 공간 객체인 건물을 대상으로 보다 정확한 정보 결합을 위하여 가시 건물 단 위의 대응을 향상시키는 기법을 제안하였다. 우선, 교차로 매칭을 이용한 위치 조정으로 SLI와 벡터 지도 간에 존 재하는 위치 편차를 제거한다. 그리고 건물에 대한 가시 영역을 위치 편차가 제거된 벡터 지도상에서 탐색한 후, 이를 초기 정보로 활용하여 역으로 SLI scene상에서 대응 건물 영역을 탐색하여 최적의 대응 관계를 결정한다. 실 험을 통하여 단순히 위치 편차만을 제거한 경우에 비하여 대응 건물 객체들 간에 일치 정확도가 약 8% 향상되는 것을 확인하였다. 따라서 본 연구의 성과는 SLI와 벡터 지도를 연계 활용하는데 있어 유용하게 적용될 수 있을 것 이다.
핵심용어 : SLI(Street-Level Imagery), 벡터 지도, 합성, ISOVIST
Abstract
Georeferenced SLI(Street-Level Imagery) services such as Google Streetview, which contain abundant information about the real world, can increase its applicability substantially through conflation with other spatial datasets. For this purpose, we propose a method to improve a correspondence of building region to combine building information more accurately. First, the spatial inconsistency between SLI and vector map is removed by alignment based on road intersections. Then, visible building regions are searched from the spatial inconsistency-removed vector map, and the optimal corresponding building areas are determined in the SLI scene using the visible regions as seed information.
The experimental results demonstrated that our method had improved the accuracy of building region correspondence by about 8%. Therefore, our method can be utilized effectively for enhancement of conflation service based on the SLI.
Keywords : SLI(Street-Level Imagery), Vector Map, Conflation, ISOVIST
1. 서 론
최근 유·무선 통신 기술의 발달과 모바일 기기가 급 속하게 확산됨에 따라 사용자들은 웹과 모바일을 통하
여 언제 어디서나 공간정보를 활용할 수 있게 되었다.
이러한 접근성 환경의 변화는 공간정보의 수요와 활용 성을 더욱 증가시키고 있으며, 이에 따라 더욱 다양하 고 풍부한 정보를 지닌 공간정보 데이터셋이 요구되고
2013년 2월 20일 접수, 2013년 4월 2일 수정, 2013년 5월 20일 채택
* 정회원ㆍ서울대학교 대학원 건설환경공학부 박사과정(Member, Department of Civil & Environmental Engineering, Seoul National University, [email protected])
** 서울대학교 대학원 건설환경공학부 박사과정(Department of Civil & Environmental Engineering, Seoul National University, [email protected])
*** 서울대학교 공학연구소 선임연구원(Seoul National University Engineering Research Institute, [email protected])
**** 정회원ㆍ서울대학교 공학연구소 선임연구원(Member, Seoul National University Engineering Research Institute, [email protected])
***** 교신저자ㆍ정회원ㆍ서울대학교 대학원 건설환경공학부 부교수(Corresponding author, Member, Member, Department of Civil & Environmental Engineering, Seoul National University, [email protected])
Vol.21 No.2 June 2013 pp.35-43 연구논문
ISSN: 2287-6693(Online) http://dx.doi.org/10.7319/kogsis.2013.21.2.035
같은 환경 하에서 효과적인 해결 방안이 될 수 있다 (Yuan and Tao, 1999; Samal et al, 2004; Chen et al., 2006).
최근 웹 포털 사이트들은 거리상에서 주행 및 보행을 통하여 실사 촬영된 위치기반 파노라마 영상(Street- Level Imagery, 이하 SLI) 서비스(Google, 2013;
Naver, 2013; Daum, 2013) 를 제공하고 있다. SLI는 사용자가 거리상에서 실세계를 바라보는 것과 동일한 영상으로 타 공간정보 데이터셋에 비하여 매우 현실감 있는 정보 제공이 가능하여 현재 SLI 서비스는 공간 및 위치 검색에 대한 시각적 부가 자료로 널리 활용되고 있다. 하지만, 이러한 장점을 갖는 SLI 역시 타 공간정 보 데이터셋과 합성을 통하여 그 활용성이 더욱 향상될 수 있다.
본 연구에서는 위와 같은 목적으로 현재 활용성이 가 장 높은 벡터 지도와 포털 사이트들이 제공하고 있는 SLI 서비스를 OpenAPI(Open Application Programming Interface)를 이용하여 주요 공간 객체인 건물을 대상으 로 정보를 결합하기 위한 대응 건물 탐색 기법 연구를 수행하였다. 이러한 기법은 건물을 중심으로 벡터 지도 의 풍부한 속성 정보를 SLI에 함께 표현함으로써 서비 스를 강화하거나 SLI의 상세한 시각적 정보를 벡터 지 도의 갱신 및 강화를 위한 실사 조사의 자료로써 활용 을 가능하게 할 수 있다.
항공 사진과 같은 래스터 영상과 벡터 지도 간 합성 연구(Juan et al., 2011)는 오랜 동안 연구가 수행되어 온 반면 최근에 서비스되고 있는 SLI와 벡터 지도 간 합성 연구는 아직 많은 연구가 이루어지지 않고 있다.
이 중 노키아는 3차원 건물의 프레임(building outline) 을 파노라마 영상에 투영시키고 이를 기반으로 건물 단 위로 분할된 3D 포인트 클라우드와 조정(alignment)를 수행함으로써 건물 객체 대응을 수행하였다(Pylvanainen et al., 2010). Hammoudi et al.(2010)은 파노라마 영상 에서 건물 단위의 전면 영역(wire-frame model of street facade)를 분리하기 위하여 3D 포인트 클라우드
서는 SLI와 벡터 지도 간 건물 객체 일치를 위한 방법 론을 상세히 설명한다. 4장에서는 실험에 대한 결과 및 분석 내용을 언급하고 마지막으로 5장에서는 결론 및 본 연구의 성과를 기반으로 향후 진행할 연구 방향을 언급한다.
2. SLI와 벡터지도 간 위치 편차 제거
SLI는 약 10m 간격으로 GPS, INS (Inertial Navi- gation System), 휠 엔코더 등의 센서에 의해 취득된 위치정보와 쌍으로 취득된다(Anguelov et al. 2010).
이에 반하여 벡터 지도는 항공사진 또는 고해상도 위성 영상으로부터 벡터라이징(vetorizing)을 통하여 구축된 다. 이와 같이 서로 다른 목적과 방법으로 구축된 공간 정보 데이터셋 간에는 위치 편차가 발생하며 이는 상호
Figure 1. Overall process
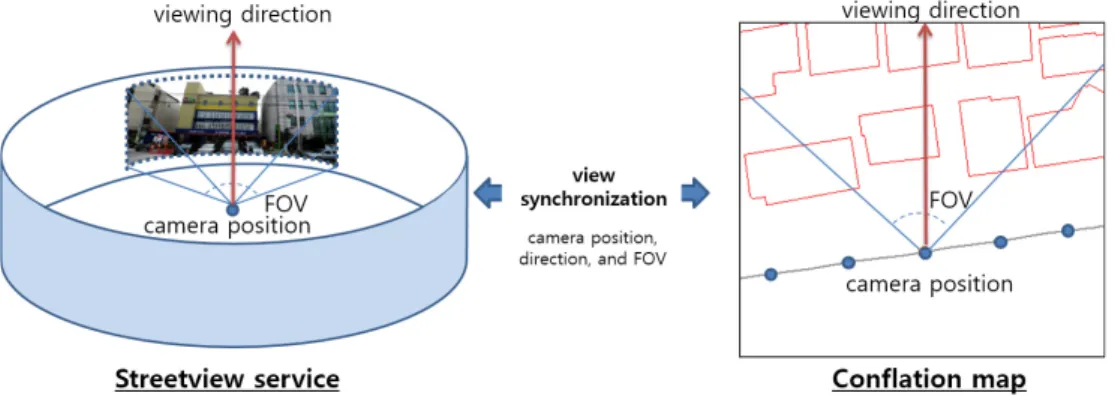
Figure 2. Visual synchronization between SLI and conflation map
간에 정보의 합성을 어렵게 하는 가장 큰 원인이 된 다(Samal et al., 2004; Chen et al., 2006). 따라서 공간 정보 데이터셋 간에 합성을 위해서는 이러한 위치 편차 가 우선적으로 제거되어야 한다. SLI와 벡터 지도 간의 위치 편차 즉, 수평적 공간 불일치의 제거 프로세스는 다음과 같이 크게 3단계로 구성(Fig. 1)되며 자세한 설 명은 본 연구의 선행 연구(Ga et al., 2012)를 참고한다.
Step1: SLI 궤적과 벡터 지도(도로 레이어)의 교차로 를 대상으로 공액점 쌍 탐색
Step2: 공액점 쌍의 패턴(방향성, 크기)을 활용한 부 정확한 공액점 쌍 필터링
Step3: 유사 패턴을 갖는 공액점 쌍을 활용한 국지적 위치 조정
위 과정의 결과물은 SLI 궤적과 벡터 지도(도로 및 건물 레이어) 간에 존재하는 수평적 위치 편차가 최소 화된 합성 지도이다. 이러한 합성 지도에서는 Fig. 2와 같이 SLI 촬영 위치가 비교적 올바른 위치에 안착됨으 로써 특정 방향과 시야각으로 촬영된 SLI scene을 합 성 지도상에서 2차원적으로 분석할 수 있다. 즉, 특정 SLI scene에서 보이는 건물에 대응하는 건물 객체들을 합성지도 상에서 탐색할 수 있는 환경이 갖춰진다.
3. SLI와 벡터 지도 간 건물 객체 일치
두 데이터셋 간에 건물 객체를 대상으로 정보를 합성 하기 위해서는 보여 지고 있는 특정 SLI scene 상의 건 물들이 벡터 지도상에서 어떤 건물 객체에 해당하는지 또는 그 역으로의 대응 관계가 결정되어야 한다. 하지 만, 객체 단위로 구성된 벡터 지도에서와 달리 많은 왜 곡과 노이즈 요소들을 포함하고 있는 SLI scene과 같 은 자연 영상에서 직접적으로 대응 건물 객체를 인지하
는 것은 매우 어려운 과정이다.
따라서 본 연구에서는 우선 위치 편차가 제거된 합성 지도상에서 건물에 대한 가시 영역을 탐색한다. 그리고 이를 초기 정보로 활용하여 SLI scene의 직선 성분을 기반으로 추출된 후보 경계선에 대하여 조정함으로써 대응 관계를 결정한다(Fig. 1).
3.1 건물 영역 초기 경계선 탐색
SLI 궤적과 벡터 지도 간 위치 조정을 통하여 생성된 합성 지도는 상호간에 존재하는 위치 편차가 상당부분 제거되었기 때문에 특정 SLI scene의 파라미터(위치, 방향, 시야각, 확대 레벨) 정보를 활용하여 합성 지도 상에서 가시 건물에 대한 경계(boundary)를 탐색한 후 이를 초기 건물 경계선(seed split line)으로 활용한다.
가시 건물에 대한 경계는 건축 공간상에서 인간의 시 각에 의한 공간 지각 및 인지를 계량적으로 모델링하기 위하여 제안된 ISOVIST(Benedikt, 1979)을 활용하여 탐색하였다. 즉 ISOVIST는 SLI scene에서 현재 보이 는 건물을 벡터 공간에서 직관적으로 인지하기 용이하 며 구현상에서 위치, 방향, 시야각 등의 파라미터에 따 른 처리가 용이한 장점을 가지고 있다. ISOVIST는 임의의 2차원 공간 내에서 특정 지점로부터 보 여 지는 모든 지점들까지 연결한 선( )들의 집합 으로 식(1)과 같이 정의되며 그 결과는 폴리곤의 형태 로 표현된다.
∈ ∩
(1)ISOVIST 공간의 탐색은 임의의 지점에서 빛이 전 방향으로 발산하는 것과 같이 방향으로 방사선 을 특정 한도의 시각적 경계(visible boundary)까지 분 사시킨다. 이렇게 분사된 방사선이 건물 경계에 닿는
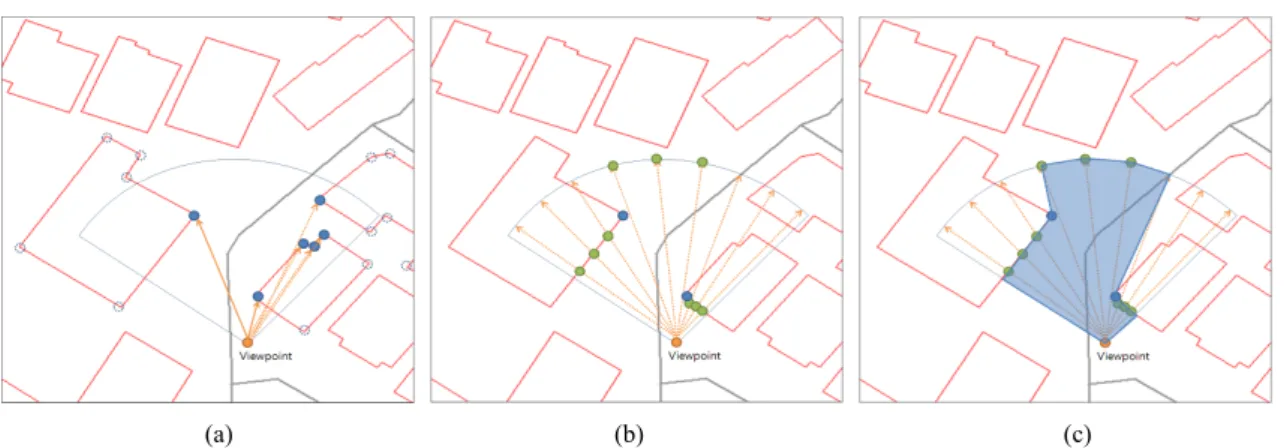
(a) (b) (c) Figure 3. The process of searching for ISOVIST
교점들과 건물 경계에 닿지 않고 방사선이 도달하는 시 각적 경계 상의 교점들을 특정 방향의 순서로 연결함으 로써 ISOVIST 공간을 결정할 수 있다. 본 연구에서는 SLI scene과 동일한 ISOVIST 공간을 탐색하기 위하여 Fig. 3의 (a)와 같이 SLI scene의 파라미터에 따라 시 각적 경계가 가변적으로 설정될 수 있도록 동적 지향 (dynamic directed) ISOVIST로 변형하였다. SLI scene 에 따른 시각적 경계까지의 영역(sector)과 중첩된 건물 들의 결절점(vertice)에 대하여 교차 연산으로 LOS (Line Of Sight)가 확보되는 결절점들을 탐색한다(Fig.
3(a)). 다음으로 가시 방사선을 일정 각도()로 스캔 을 통하여 교차점들을 모두 탐색한 후(Fig. 3(b)), 앞서 탐색된 결절점들과 함께 폐합된 폴리곤을 생성한다 (Fig. 3(c)). 이와 같이 탐색된 폴리곤은 대상 SLI scene 에서 보이는 공간과 동일한 2차원의 가시 공간 즉, ISOVIST 공간이다.
탐색된 ISOVIST 공간과 각 건물들과 접하는 라인이 가시 건물의 경계선으로 이 경계선은 SLI scene에서 보여 지는 각 건물 영역에 대응된다. 탐색된 가시 건물 의 경계선을 1차원의 가상의 라인에 투영하고 이 투영 된 구간을 대상 SLI scene의 너비(width)에 비례하여 맵핑함으로써 Fig. 4과 같이 벡터지도 상의 건물이 SLI scene에서 차지하는 범위를 알 수 있다. 하지만, 벡터 지도를 구축하는 과정에서 발생하는 형상 오차 및 위치 편차를 제거하는 과정에서 발생하는 형상 왜곡 등으로 인하여 건물 영역의 경계가 정확하게 일치되지 못함을 알 수 있다. 따라서 본 연구에서는 합성 지도로 부터 추 출한 가시 건물의 경계선을 초기 경계선으로 하여 SLI scene에서 이미지 프로세싱 기법을 적용하여 후처리 (postprocessing)함으로써 보다 정확한 건물 영역의 경 계를 탐색한다.
Figure 4. Building area mapping from an SLI scene
3.2 건물 영역 경계선 탐색 3.2.1 직선 세그먼트 추출
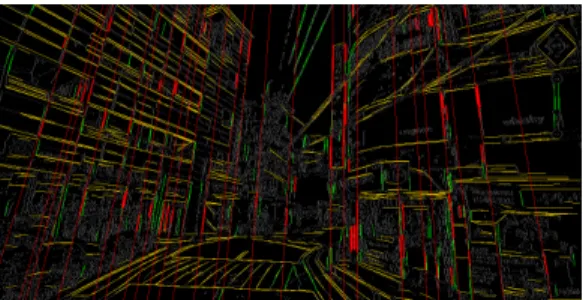
실세계에서 건물은 창문, 현관, 간판, 건물 자체의 외 벽 등으로 구성되며 이러한 구성 요소들은 영상에서 대 부분 직선으로 표현되기 때문에 에지 영상에서 직선 세 그먼트(straight line segment)는 건물 영역을 추출하거 나 분할하는데 있어 매우 중요한 요소이다. 따라서 건 물 영역에 대한 후보 분할선은 직선 세그먼트만을 대상 으로 탐색한다. 이를 위해 우선 SLI scene에 대한 에지 영상을 생성한다. SLI는 칼라 영상으로 캐니 에지 연산 자(Canny, 1986)를 다중 채널 정보를 반영할 수 있도 록 식(2)와 같이 적용하여 채널 중 가장 큰 에지 강도 ( )로 구성된 에지 영상을 생성한다.
(2)
여기서, 는 각 채널 영상에서 해당 픽셀에 대한 에지 강도로서 식(3)과 같이 계산되며, Fig. 5는 캐니 에지 영상의 결과 예시를 나타낸다.
Figure 5. Canny edge image from an SLI scene
(3)추출된 에지 영상에서 건물을 구성하는 에지 성분만 을 추출하기 위하여 직선 세그먼트 검출을 수행한다. 일반적으로 영상에서 직선을 검출하기 위해서 영상 공 간 을 매개변수 공간 으로 변환하여 동일선 상에 존재하는 화소들을 분석하는 허프 변환(Rafael and Richard, 2002)이 널리 활용된다. 하지만, 허프 변 환은 파라미터 공간에서 단순히 셀(cell)의 누적 카운트 에 의존하기 때문에 SLI 영상과 같이 복잡한 영상에서 연속성을 반영하지 못해 정확한 직선 세그먼트를 추출 하기 어렵다. 따라서 본 연구에서는 에지들의 연결 요 소(connected component of edge, 이하 CCE)를 기반 으로 직선 세그먼트를 추출하였다. CCE는 에지 영상에 서 인접한 에지 픽셀(white pixel)들로 구성된 하나의 덩어리를 의미하며, 순차적으로 확산하면서 연속된 에 지 픽셀을 탐색하는 과정을 통하여 각 CCE는 순서 (sequence) 정보를 포함하게 된다. Fig. 6는 캐니 에지 영상을 대상으로 탐색된 각 CCE의 MBR(Minimum Bounding Rectangle)을 나타낸다.
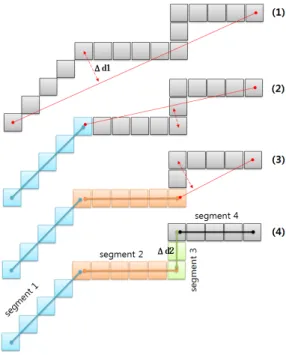
직선 세그먼트는 연속성 정보를 갖는 CCE를 순차적 으로 트래킹하면서 주어진 조건에 따라 분할함으로써 얻는다. 여기서 분할 조건은 직선 세그먼트의 분할 여 부를 결정하는 임계 거리()와 분할된 직선 세그먼 트의 최소 길이를 나타내는 임계 길이 ()가 활용된 다. 특정 CCE가 주어졌을 때, 첫 번째 픽셀(start pixel) 과 마지막 픽셀(end pixel)을 연결한 직선과 CCE를 구 성하는 모든 픽셀과의 거리를 계산한다. 그리고 가장 멀리 떨어진 픽셀과의 거리가 임계거리() 보다 크 면 첫 번째 픽셀부터 해당 픽셀까지 그리고 해당 픽셀 부터 마지막 픽셀로 구성되는 2개의 CCE로 분할한다.
분할된 모든 CCE에 대해서 더 이상 분할되지 않을 때 까지 위 과정을 반복 수행함으로써 최종적으로 모든
Figure 6. CCE image from an SLI scene
Figure 7. The process of splitting an straight line segment
CCE들은 임계거리() 보다 작은 직선 세그먼트들 로 분할된다. Fig. 7은 3번의 반복 수행을 통해서 4개 의 직선 세그먼트들로 분할된 예시를 나타낸다.
건물을 구성하는 요소들의 에지들은 다소 긴 직선을 이룬다고 가정할 수 있기 때문에 매우 짧은 직선 세그 먼트들은 노이즈로 간주할 수 있다. 따라서 최종 분할 된 직선 세그먼트의 길이가 임계 길이() 보다 짧은 세그먼트는 삭제한다. 본 연구에서는 임계 거리() 와 임계 길이()는 각각 와 10으로 설정하였다.
Fig. 8은 추출된 직선 세그먼트 중에서 건물의 수직적 경계에 의한 분할을 수행하기 위해, 수직 방향에서
Figure 8. Vertical straight line segments (green lines)
≤ ≤ 범위의 직선 세그먼트(green line) 들을 하이라이트 한 그림을 나타낸다.‘
3.2.2 후보 경계선 추출
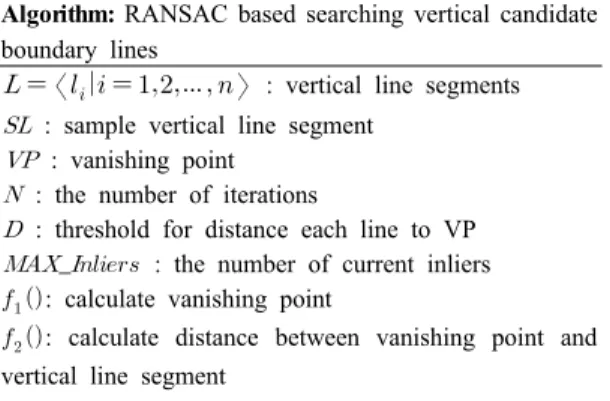
지상에서 중심투영으로 촬영된 SLI 영상은 원근 왜 곡 (perspective distortion)을 포함한다. 예를 들어 일반 적으로 직사각형의 형태를 갖는 창문의 경우 SLI에서 는 사다리꼴의 형태로 나타난다. 이러한 특성으로 SLI scene에는 수평 방향으로는 건물의 수와 배치에 따라 다수개의 소실점이 존재할 수 있으나, 수직 방향으로는 한 개의 소실점이 존재하게 된다. 따라서 본 연구에서 는 수직 방향의 직선 세그먼트들을 대상으로 RANSAC (RANdom SAmple Consensus) 모델 추정 기법을 활 용한 소실점 기반 클러스터링을 통하여 실제 건물의 경 계가 될 수 있는 후보 경계선을 탐색한다.
RANSAC(Fischler and Bolles, 1981)은 측정한 데이 터셋이 많은 노이즈를 포함할 경우 매우 강건하게 모델 을 예측할 수 있는 기법으로 전체 데이터셋 중에서 모 델을 결정하는데 필요한 최소의 데이터를 랜덤하게 선 정하고 초기 모델을 설정한 후 이와 일치하는 데이터의 집합(consensus set)을 확장하며 최적의 모델을 탐색한 다. 본 연구에서는 이 RANSAC 알고리즘을 적용하여 수직 방향의 직선 세그먼트들을 대상으로 샘플 직선 세 그먼트들을 추출하여 초기 소실점을 추정한다. 그리고 이 소실점과 수직 거리가 일정 수준 이하에 있는 직선 세그먼트들을 정상치 데이터 집합에 포함시킨다. 이 데 이터 집합에 대한 평가는 개수로 판단하며 이 전 단계 의 평가 결과보다 좋으면 새로운 정상치 데이터 집합으 로 모델을 갱신한다. 이 과정을 더욱 우수한 평가 결과 를 갖는 정상치 데이터 집합을 찾을 확률이 일정 수준 이하가 될 때가지 반복하며, 반복횟수(N)는 식(4)을 통 해 계산된다.
과정에 노이즈로 작용하기 때문이다. 또한, 영상의 60%만 활용하므로 탐색 속도는 향상되는 장점을 갖는 다. Fig. 9은 수식 방향의 직선 세그먼트들 (green line) 중 건물 단위로 분할할 수 있는 후보 경계선(red line) 을 나타낸다.
Algorithm: RANSAC based searching vertical candidate boundary lines
〈
〉
: vertical line segments : sample vertical line segment
: vanishing point
: the number of iterations
: threshold for distance each line to VP
_ : the number of current inliers
: calculate vanishing point
: calculate distance between vanishing point and vertical line segment
while iterationCnt <
{
// Hypothesis:
01. Select random sample line set ⊂
02. Estimate ← // Verification:
03. If dist← then ←
04. If _
then
Update ←, _←
Save
iterationCnt ++
else iterationCnt ++
}
Table 1. The algorithm of extracting candidate split lines for building area
Figure 9. Extracted candidate split lines(red lines) by RANSAC algorithm
3.3 건물 영역 최적 경계선 탐색
수직 방향의 소실점 기반 클러스터링을 통하여 건물 을 구성하지 않는 노이즈 요소들이 제거된 후보 경계선 들을 대상으로 실제 건물 영역의 경계선을 추출한다. 이를 위해 본 연구에서는 건물 영역 후보 경계선을 구 성하는 에지들의 길이와 에지의 양 옆으로 이웃해 있는 화소들의 색상 차 정보를 활용한다. 우선, 건물 자체의 경계는 건물 내에 포함된 다른 에지들보다 긴 특성을 보인다. 그리고 일반적으로 하나의 건물은 동일하거나 유사한 색상으로 이루어지기 때문에 Fig. 10와 같이 탐 색된 에지(red solid line)들을 대상으로 영상의 상단 (top)과 하단(bottom)으로 가상의 연장선(red dotted line)을 생성하고, 이 연장선의 좌우로 인접한 픽셀들 간에 유사도를 분석한다.
예를 들어 Fig. 10의 건물 내부의 창문에 의해 생성 된 에지(후보 경계선(B)는 해당 에지 좌우의 픽셀들의 색상 유사도는 매우 낮지만 가상으로 연장된 부분은 높 게 나타난다. 이에 반하여 건물의 경계에 의한 에지(후 보 경계선(A))는 전체적으로 픽셀 간 유사도가 매우 낮 게 나타낸다. 따라서 본 연구에서는 각 후보 경계선의 행(row)을 따라 세로 방향 (top->bottom)으로 이동하면 서 양쪽의 픽셀 쌍들 간 색상 차이로 비유사도(color dissimilarity, )를 식(5)와 같이 정의한다.
(5)
여기서 은 해당 연장선을 구성하는 픽셀 수 즉, 영상의 높이를 의미한다. 은 연장선의 각 행() 의 비유사도(dissimilarity of row)를 나타내며 식(6)와 같이 연장선으로 부터 좌 우 2 픽셀의 간격을 두고 3개 의 픽셀 쌍() 간의 색상 값 차의 평균으로 계산된다.
좌 우 2 픽셀의 간격을 둔 이유는 혼합 픽셀(mixed
Figure 10. The characteristic of candidate boundary lines
pixel)을 피하기 위함이며 픽셀 쌍의 수는 연산량을 줄 이면서 연장선을 생성한 인접 영역의 차이만을 판단하 기 위함이다.
(6)
위와 같이 계산된 연장선의 비유사도와 세그먼트의 길이를 선형 조합하여 최종적으로 건물 영역 분할을 위 한 분리도(degree of separation) 를 계산한다. 분리 도는 두 지표를 동일한 가중치로 결합하여 식(7)과 같 이 정의하였다.
(7)
와 는 연장선의 정규화된 색상 비유사도 (nomalized color dissimilarity)와 에지 자체의 정규화 된 길이(normalized length)를 의미한다. 최종적으로 건 물 영역의 경계 즉, 최적 경계선의 탐색은 합성 지도로 부터 탐색된 초기 경계선을 기준으로 영상의 너비 (width)의 10%의 버퍼 영역(좌 우) 내에서 가장 분리도 가 높은 직선 세그먼트의 위치로 조정된다.
4. 실험 결과 및 분석
실험에 적용된 SLI 서비스와 벡터 데이터는 각각 다 음의 로드뷰(Daum Roadview) 서비스와 도로명 전자 지도이다. 로드뷰는 현재 국내를 대상으로 서비스되고 있는 SLI 중 가장 넒은 범위로 상세한 도로망을 서비스
(c)
(d)
(e)
(f) 과 조정 전·후 각각의 면적(building area)과 중첩면적
(overlapped area)을 기반으로 완성도(completeness, overlapped area/reference area), 부합도(correctness, overlapped area/building area), 그리고 전체 정확도로 서 F-척도(F-measure)의 지표들로 평가를 수행하였다.
Table 2는 50개의 SLI scene을 대상으로 수행된 정량 적 평가 결과로서 평균적으로 완성도와 부합도는 각각 8.29%p, 5.04%p가 향상되어 전체 정확도가 7.14%p가 향상됨을 확인하였다.
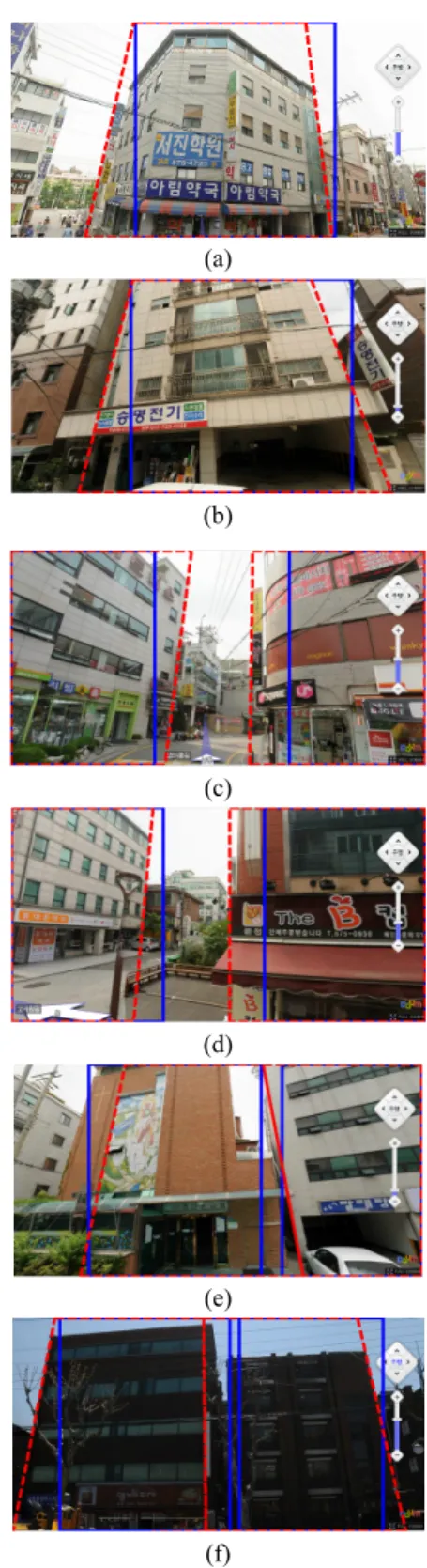
Fig. 11은 평가에 사용된 SLI scene의 예시로서 합성 지도로부터 추출된 초기 경계선(blue solid line)을 대 상으로 본 연구에서 제안된 건물 경계 조정을 통하여 최종적으로 탐색된 최적 경계선(red dotted line)의 결 과를 나타낸다. 우선, (a)(b)(c)(d)는 건물 경계 분할이 우수한 경우로 그림에서 보는 것과 같이 SLI scene에 서 대략적인 건물 영역 정보를 기반으로 실제 건물을 보다 정확하게 탐색하는 결과를 볼 수 있다. 이러한 결 과는 대응된 벡터 지도의 건물 속성 정보를 SLI scene 에 표현하거나 영상의 특징 정보로 벡터 정보를 강화하 는데 유용하게 활용될 수 있을 것으로 판단된다.
전체적으로는 향상된 결과를 보인 반면, 일부 SLI scene의 낮은 품질과 높은 복잡도 등으로 알고리즘의 한계점도 존재하였다. Fig. 11의 (e)의 경우는 실제 건 물의 경계보다 건물 외벽에 그려진 벽화로 인하여 분리 선의 비유사도가 더 높아 잘못 탐색된 예시를 나타낸 다. (f)의 경우는 건물 사이에 큰 나무가 존재하며 전반 적으로 어둡게 촬영되어 후보 경계선 탐색에 제약을 받 음으로써 세로 간판을 기준으로 건물이 분할된 결과를
seed boundary line
optimal boundary line
completeness 89.74% 98.03%
correctness 91.58% 96.62%
F-Measure 90.02% 97.16%
Table 2. The result of quantitative evaluation
(b)
Figure 11. The experiment result of adjusting building boundary
보였다. 이러한 문제를 극복하기 위해서는 건물을 구성 하는 지배적인 색상, 하늘 영역과 만나는 경계선 등을 고려하여 보다 알고리즘 강화함으로써 극복할 수 있을 것으로 판단된다. 마지막으로 SLI scene에는 건물이 존재하나 벡터 지도상에는 건물 객체가 누락되거나 그 역으로의 문제도 존재할 수 있다. 비록 본 실험 대상 지 역에서는 이러한 경우가 존재하지 않았으나 이와 같이 대응되지 않는 경우에 대한 고려가 필요할 것이다.
5. 결 론
본 연구에서는 풍부한 시각적 정보를 갖는 SLI 서비 스와 풍부한 속성 정보를 갖는 벡터 지도 간 건물 객체 를 대상으로 합성을 수행하기 위해 대응 건물 탐색 기 법을 제안하였다. 벡터 지도에서는 대상 건물을 정확하 게 추출할 수 있는 반면, 복잡한 실세계 영상인 SLI scene 상에서 대응 건물 객체를 인지하는 것은 매우 어 려운 문제이다. 따라서 본 연구에서는 두 데이터셋 간 에 위치 편차가 제거된 합성 지도로부터 대상 건물의 가시 영역을 추출하고, 이를 초기 정보로 활용하여 SLI scene 상에서 대응 건물 영역을 탐색하는 기법을 적용 하였다. 실험을 통하여 제안된 기법은 위치 편차만을 제거하였을 경우보다 완성도와 부합도가 각각 약 8%, 6% 향상되었으며, 이는 시각적으로 두 데이터셋 간 건 물 객체의 영역 일치에 있어 상당히 향상된 결과를 나 타내었다. 향후 연구에서는 본 연구의 성과를 기반으로 관심지점(point of interest) 데이터를 연계하여 현재 보 여지고 있는 건물이 포함하고 있는 상점, 음식점 정보 등을 영상에 표현하거나 역으로 간판 정보를 활용하여 관심지점의 생성 및 갱신하는 등의 보다 실용적인 연구 를 수행하고자 한다.
감사의 글
본 연구는 국토교통부 첨단도시개발사업 - Realtime Digital Map 생성 및 활용기술 개발과제의 연구비지원 (11첨단도시G10)에 의해 수행되었습니다.
References
1. Google, 2013, Google Maps, http://maps.google.co.kr.
2. Naver, 2013, Naver Map, http://map.naver.com.
3. Daum, 2013, Daum Map, http://local.daum.net.
4. Anguelov, D., Dulong, C., Filip, D., Frueh, C., Lafon, S., Lyon, R., Ogale, A., Vincent, L., and Weaver, J., 2010, Google street view: capturing the world at
street level, IEEE Computer, Vol.43, No. 6, pp.
32-38.
5. Benedikt, M. L., 1979, To take hold of space: isovist and isovist field, environment and planning B, Vol. 6, pp. 47-65.
6. Canny, J., 1986, A computational approach to edge detection, IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol. 8, No. 6, pp. 679-698.
7. Chen, C. C., Knoblock, C. A., and Shahabi, C., 2006B, Automatically conflating road vector data with orthoimagery, GeoInformatica, Vol.10, No. 4, pp. 495-530.
8. Fischler, M. A. and Bolles, R. C., 1981, Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography, Communica-tions of the ACM, Vol. 24, No. 6, pp. 381-395.
9. Ga, C., Lee, J. H., Yang, S. C., Yu, K., 2012, The removal of spatial inconsistency between SLI and 2D map for conflation, Journal of the Korean society for geo-spatial information system, Vol. 20, No. 2, pp. 63-71.
10. Hammoudi, K., Dornaika, F., Soheilian, B. and Paparoditis, N., 2010, Extracting wire-frame models of street facades from 3D point clouds and the corresponding cadastral map, IAPRS, Vol. 38, Part 3A, pp. 91-96, Saint-Mandé, France.
11. Juan J. Ruiz, F. Javier Ariza, Manuel A. Ureña, Elidia B. Blázquez, 2011, Digital map conflation: a review of the process and a proposal for classification.
International Journal of Geographical Information Science, Vol. 25, No. 9, pp. 1439-1466 (2011).
12. Pylvanainen, T., Roimela, K., Vedantham, R., Itaranta, J., Wang, R.S., Grzeszczuk, R., 2010, Automatic alignment and multi-view segmentation of street view data using 3D shape priors, In Symposium on 3D Data Processing, Visualization and Transmission, Paris, France.
13. Rafael C. Gonzales and Richard E. Woods, Digital image processing, Second Edition, Prentice Hall, 2002.
14. Samal, A., Seth, S., and Cueto, K., 2004, A featurebased approach to conflation of geospatial sources, International Journal of Geographical Information Science, Vol. 18, No. 5, pp. 459-489.
1. 15. Yuan, S. and Tao, C., 1999, Development of conflation components, The Proceedings of Geoinforma-tics'99 Conference, Ann Arbor, USA, pp.
1–13.