학 술 논 문
241
온도범위에 따른 비침습적 자기공명 온도측정방법의 최적화
김종민
1,2,3
·Suchit Kumar2,4
·조영승1,5
·Joshua Haekyun Park5,6
김정희
5,6
·이철현5
·오창현1,2,3,4,5
1
고려대학교 전자 및 정보공학과,2
고려대학교 한국 인공 장기 센터,3
고려대학교 건강안전진단 ICT융합기술연구팀,4
고려대학교 바이오마이크로시스템 협동과정,5
한국기초과학지원연구원,6
고려대학교 산업기술연구소Temperature-Range-Dependent Optimization of Noninvasive MR Thermometry Methods
Jong-Min Kim
1,2,3
, Suchit Kumar2,4
, Young-Seung Jo1,5
, Joshua Haekyun Park5,6
, Jeong-Hee Kim5,6
, Chulhyun Lee5
and Chang-Hyun Oh1,2,3,4,5
1 Department of Electronics and Information Engineering, Korea University
2 Korea Artificial Organ Center, Korea University
3 ICT convergence technology for Health&Safety, Korea University
4 Department of Biomicrosystem Technology, Korea University
5 Korea Basic Science Institute
6 Research Institute for Advanced Industrial Technology, Korea University
(Manuscript received 22 October 2015; revised 3 December 2015; accepted 8 December 2015)
Abstract: Noninvasive temperature monitoring is feasible with Magnetic Resonance Imaging (MRI) based on tem- perature sensitive MR parameters such as T 1 and T 2 relaxation times, Proton Resonance Frequency shift (PRFs), diffusion, exchange process, magnetization transfer contrast, chemical exchange saturation transfer, etc. While the temperature monitoring is very useful to guide the thermal treatment such as RF hyperthermia or thermal ablation, the optimization of the MR thermometry method is essential because the range of temperature measurement depends on the choice of the measurement methods. Useful temperature range depends on the purpose of treatment methods, for example, 42 o C to 45 o C for RF hyperthermia and over 50 o C for thermal ablation. In this paper, MR ther- mometry methods using T 1 and T 2 relaxation times and PRFs-based MR thermometry are tried on a 3.0 T MRI sys- tem and their results are reported and compared. In addition, the scanning protocol and temperature calculation algorithms from T 1 and T 2 relaxation times and PRFs are optimized for the different temperature ranges for the pur- pose of RF hyperthermia and/or thermal ablation.
Key words: Magnetic resonance imaging, Thermometry, Thermal therapy, Specific Absorption Rate, Proton Res- onance Frequency Shift, T 1 , T 2 ,
I. 서 론
비침습적(noninvasive) 자기공명 온도영상 촬영은 T 1 [1]
과 T 2 [2] 이완시간(relaxation time), 수소공명주파수(Proton Resonance Frequency)[3], 확산(diffusion)[4], 자화전이 (magnetization transfer)[5] 등의 온도 변화량을 반영하는 자기공명영상의 파라미터를 통하여 구현 가능하다. 자기공 Corresponding Author : Chang-Hyun Oh
R&D center room number 337, Nokji-Campus, Korea University, Anam-Dong 5-Ga, Seongbuk-Gu, Seoul, Korea Tel: +82-2-3290-3984 / E-mail: [email protected]
이 연구는 미래창조과학부(NRF-2012K1A3A1A24025536, 초고
자장 MRI 용 코일 개발을 위한 한독 공동연구 및 교육 프로그램
개설)와 산업통산자원부(100447904, 체내온도 추정 영상 기능이 있
는 고주파 온열 치료기 개발) 과제, 미래창조과학부의(NRF-2015-
M3D5A1065997, 신시장창조 차세대의료기기개발사업) 지원을 받
아 수행하였음.
242
치료하는 hyperthermia, 50 C 이상의 온도에서 치료하는 온열 ablation, 세 가지의 부류로 분류할 수 있다. 이 방법 은 최근 컴퓨터 단층 촬영(computed tomography), 초음 파(ultrasound), 자기공명영상장치(magnetic resonance imaging) 등의 진단용 영상장비와 결합하여 높은 안전성을 확보할 수 있다. 하지만 자기공명영상장치는 비침습적이며, 비 이온화 방사선(nonionizing radiation)을 사용하며, 영 상을 획득할 수 있는 자유도와, 연부 조직(soft tissue) 대 조도가 다른 영상기기보다 높기 때문에 이를 온열 치료기와 결합하는 연구가 많이 주목을 받고 있다.
자기공명영상장치를 이용한 비침습적 온도영상측정 방법 중에 수소자기공명주파수의 변화량을 측정하는 방법이 온도 에 따른 주파수의 변화가 선형적이고, 여러 가지의 조직에 서 측정 가능하다는 점에서 영상유도온열치료 및 SAR에 의 한 온도상승을 측정하는데 많이 유용하다고 알려져 있다. 그 러나 이 방법은 지방조직의 온도를 측정하지 못하기 때문에 이 경우는 T 1 과 T 2 이완 시간을 측정하는 방법 등의 다른 방법을 이용해야 한다. 즉, 수소자기공명주파수의 변화량을 이용한 자기공명 온도측정방법이 가장 우수하지만 측정하는 조직의 특성에 따라 다른 방법도 함께 고려되어야 한다.
앞서 설명하였듯이 온열치료법마다 목표 온도 범위가 다 르기 때문에 이에 따라 자기공명온도측정은 정확도의 향상 을 위해서 최적화가 필요하다.
본 연구에서는 온도 범위에 따라 온도에 따른 T 1 과 T 2 이 완 시간, 수소자기공명주파수의 변화량을 이용한 자기공명 온도측정방법을 3.0 T 자기공명영상장치를 사용하여 비교 분석하였다. 또한 추가적으로 영상획득조건을 각각 최적화 하였다.
Ⅱ. 방 법
1. 수소자기공명주파수의 변화를 사용한 자기공명 온도측정 방법
온도에 따른 수소자기공명주파수의 변화량를 측정하는 일 반적인 방법은 경사자계 에코를 이용한 방법으로서[3], 온도 변화량의 측정은 위상차이(∆Φ), 물의 수소자기공명주파수의 온도에 따른 변화 상수(α), 주자장의 세기(B 0 ) 와 에코시간 (TE) 의 비율로 계산한다. 이 경우 자기공명영상 데이터획득 방법과 온도분포의 재구성 알고리즘은 다음과 같다.
1 단계: 온도가 변화는 동안 T 1 경사자계 에코 펄스열을
Φ unwrap 식 (1)
4 단계: 기준 온도의 위상영상(Φ unwrap (T ref )) 과 측정하고 자 하는 온도의 위상영상(Φ unwrap (T)) 의 위상 차이(∆Φ)를 계 산(식 (2)).
∆Φ=Φ unwrap (T) − Φ unwrap (T ref ) 식 (2)
5 단계: 온도변화량(∆T) 계산(식 (3)).
∆T = ∆Φ / (α·γ·B 0 ·TE) 식 (3) 물의 수소자기공명주파수의 온도에 따른 변화 상수는 물 에서 −1·10 −8 / o C 이며, 이 상수는 −150 o C 부터 100 o C 의 범 위에서 유효하다[9]. 만약에 온도 이외의 영향으로 인한 위 상의 변화가 균일하다면 식(2)의 위상의 차로 인하여 이 외 부의 위상변화가 상쇄되지만, 균일하지 않다면 추가적인 위 상변화량의 보상이 필요하다.
이 자기공명온도영상방법을 이용하여 높은 공간해상도와 온도해상도의 온도영상을 획득하기 위해서는 두 가지의 고 려사항이 필요하다. 첫 번째, 경사자계 에코펄스열에서는 이완시간에 의한 신호의 감쇄가 TE가 증가함에 따라 기하 급수적(exponentially)으로 증가하고, 횡축자화의 dephase 로 인한 위상의 변화가 TE에 선형적으로 증가하므로 TE와 이완시간에 따른 신호강도의 변화량을 고려하여야 한다.
따라서 위상변화량의 신호대잡음비(SNR ∆Φ ) 와 TE, 이완 시간의 관계식은 식 (4)와 같다.
식 (4)
식 (4)의 정의에 의하여 위상변화량의 신호대잡음비는 이완시간과 TE가 비슷할 때 최대값을 보이며, 그림 1은 이 관계식을 시뮬레이션한 결과이다. 두 번째는 온도 변화량의 측정범위인데, 위상은 0부터 2π로 제한되기 때문에 이 경우 최대 측정가능 온도변화량의 범위는 2π/(α·γ·B 0 ·TE)이 며, 그림 2는 TE에 따른 최대 측정가능 온도 변화량의 범 위를 보여 주고 있다(3.0 T로 가정).
2. T 1 이완시간의 변화를 사용한 자기공명 온도측정 방법 온도의 변화는 T 1 이완시간을 변화시키는데 이 경우 T 1
이완시간과 온도 변화는 거의 선형적 관계로 볼 수 있으며 Φ wrap – 2π , Φ wrap > 2π
Φ wrap , otherwise
⎩ ⎪
⎨ ⎪
=
T 2 *
T 2 *
T 2 *
∂SNR ΔΦ
--- T ∂TE ( 2 * – TE )e
TE T2* ---
–
∝
T 2 *
243
[13], 이 때 온도와 T 1 이완시간의 관계는 식 (5)와 같이 표 현할 수 있다.
T 1 (T) = T 1 (T ref ) + m ·(T − T ref ) 식 (5) 이 때, T ref 는 기준온도이며, m은 온도에 따른 T 1 이완시 간의 변화량이다(m = dT 1 / dT). 여기서 온도에 따른 T 1 이 완시간의 변화량은 세포의 종류와 영상획득조건에 따라 달 라지기 때문에 경험적으로 획득하여야 한다.
T 1 이완시간을 측정하는 방법은 IR (Inversion Recovery) [11], SR (Saturation Recovery), LL (Look-Locker)[12]
과 VFA (Variable Flip Angle)[13]이 있다.
IR 방법은 먼저 숙임각이 180 o 인 고주파펄스를 통하여 종 축자화를 반전시키며, 반전시간동안 종축자화가 회복되는 것 을 기다리고 신호를 획득한다. 이 때 두 개 이상의 다른 반 전시간(TI n ) 에 획득한 신호(SI n ) 가 필요하다. 획득한 두 개 이상의 신호를 사용하여 Bloch equation 시뮬레이션의 결 과와 최소자승법을 이용하여 최적의 T 1 이완시간을 계산한 다(식 (6)).
SI n = 식 (6)
이 때, M 0 는 평형자화이다.
LL 방법은 첫 번째 단계로 종축자화를 반전시키는 것에 서 IR 방법과 유사하지만 종축자화가 회복되는 동안 한 개 의 신호를 획득하는데 반해, 위상간격시간(τ) 간격으로 작은 숙임각(α)을 가지는 고주파 펄스를 연속적으로 인가하여 신 호를 획득한다. 획득한 세트의 신호를 Bloch equation 시 뮬레이션의 결과와 최소자승법을 이용하여 최적의 T 1 이완 시간을 계산한다(식 (7)과 (8)).
SI n = 식 (7)
T 1 = 식 (8)
VFA 방법은 두 개 이상의 다른 숙임각(α n ) 을 가지는 T 1
경사자계 에코 펄스열을 이용하여 신호를 획득한다. 획득한 신호(SI n ) 는 식 (9)와 같다.
M 0 1 e
TIn T1 ---
⎝ – ⎠
⎛ ⎞
–
⎝ ⎠
⎜ ⎟
⎜ ⎟
⎛ ⎞
A 1 Be
τ
n T1* ---⎝ – ⎠
⎛ ⎞
–
⎝ ⎠
⎜ ⎟
⎜ ⎟
⎛ ⎞
τ τ
T
1*---- + ln ( cos α )
⎝ ⎠
⎛ ⎞
---
그림 1. TE와 에 따른 위상 변화량의 신호대잡음비, (a),와 잡음의 정도, (b). 주어진 에 대해서 TE가 와 비슷할 때, 신호대잡음비 는 최대값을 보인다. 그림에 쇄선으로 TE = 직선을 보였다.
Fig. 1. Signal-to-Noise Ratio of the phase difference, (a), and the noise level, (b), in the temperature image for various combinations of TE and , (a), and noise level in temperature image, (b). When TE is equal to relaxation time, Signal- to-Noise Ratio of phase difference is maximum for the given . The broken lines show the line, TE = .
T 2 * T 2 * T 2 *
T 2 *
T 2 * T 2 *
T 2 * T 2 *
그림 2. 수소자기공명주파수의 변화량을 통한 온도측정 방법의 측정 가능 온도 범위. 측정 범위는 TE에 반비례한다.
Fig. 2. Measurable temperature range for 360o period of PRFs-based MR thermometry. This range is inversely proportional to the TE.
244
식 (10)
식 (11)
T 1 이완시간의 변화량을 통한 온도측정 방법의 성능은 T 1
이완시간 측정의 정확도에 따라서 결정된다. 이전에 연구된 바에 따르면[14], IR과 SR 방법은 T 1 이완시간을 측정하기 위한 최적의 방법이지만 영상 획득시간이 길어 높은 시간 해상도를 필요로 하는 온도측정에는 부적합하며, VFA 방법 은 낮은 신호대잡음비를 가지고 있으므로 T 1 이완시간의 측 정이 부정확하여 높은 온도해상도를 필요로 하는 온도측정 에 부적합하다. 비록 LL 방법이 고주파 펄스가 인가되는 동 안 종축자화가 회복된다는 단점은 있지만 고주파 펄스의 길 이가 짧다고 가정한다면 높은 시간과 온도해상도를 모두 가 지게 된다. 여기서 LL 방법은 경사자계 에코 계열의 펄스 열이기 때문에 숙임각은 LL 방법을 이용한 T 1 이완시간측 정방법에 가장 중요한 고려사항이다.
3. T 2 이완시간의 변화를 통한 자기공명 온도측정 방법 온도의 변화는 T 2 이완시간도 변화시키는데 이 때 T 2 이 완시간과 온도 변화는 아래와 같이 선형적 관계로 생각할 수 있다(식 (12)).
T 2 (T) = T 2 (T ref ) + m ·(T − T ref ) 식 (12) 이 때, T ref 은 기준온도이며, m은 온도에 따른 T 2 이완시 간의 변화량이며(m = (dT 2 )/dT), 온도에 따른 T 2 이완시간 의 변화량은 세포의 종류와 영상획득조건에 따라 달라지기 때문에 경험적으로 획득하여야 한다.
T 2 이완시간의 변화량을 통한 온도측정 방법의 성능은 T 2
이완시간의 측정의 정확도에 따라서 결정되는데, 보통 mSE (multiple Spin Echo) 펄스열이 T 2 이완시간을 측정하는 데 사용된다. mSE 펄스열은 숙임각이 90 o 인 고주파 펄스를 가한 후, 숙임각이 180 o 인 고주파 펄스열을 연속적으로 인가 하며 여러 개의 echo 신호(SI n ) 를 획득하고, SI n 을 Bloch equation 시뮬레이션의 결과와 최소자승법을 이용하여 최 적의 T 2 이완시간을 계산한다(식 (13)).
SI n = 식 (13)
(Achieva 3.0 T, Philips) 와 상용 quadrature 고주파안테 나를 이용하였다. 수소자기공명주파수의 변화량을 얻기 위해 T 1 경사자계 에코 펄스열을 이용하였으며, 영상획득조건은 TR = 300 msec, field of view (FOV) = 240 mm, matrix size = 256 × 256, number of excitations (NEX) = 1, slice thickness = 5 mm, 숙임각 = 30 o 이었다. TE에 따른 온도영 상의 평가를 위하여 다양한 TE를 사용하여 영상을 획득하 였다. T 1 이완시간 측정을 위한 LL 방법의 영상획득조건은 TR/TE = 12/5 msec, τ = 37 msec, the number of images
= 22 로 숙임각에 따른 온도영상의 평가를 위하여 다양한 숙 임각들을 이용하였다. T 2 이완시간 측정을 위한 mSE 펄스 열의 영상획득조건은 TE = 30 msec, the number of echoes
= 15 로 TR에 따른 온도영상의 평가를 위하여 다양한 TR들 을 이용하였다. 열을 조직모사팬텀에 투여하기 위하여, 1100 Watt의 고주파시그널을 사용하였다. MATLAB 2013b (Mathworks, Inc.) 을 사용하여 영상복원 및 시뮬레이션을 수행하였다.
III. 결 과
수소자기공명주파수의 변화를 통한 온도측정을 위한 T 1
경사자계 에코 펄스열을 최적화하기 위하여 조직모사팬텀의 이완시간을 계산하였다. 조직모사팬텀의 이완시간은 본 실험의 경우 약 30 msec이었으며, 이 경우 TE가 약 30 msec 일 때 온도영상이 최대의 신호대잡음비값을 가지며, TE 가 각각 5/30/60 msec일 때, 예측한 측정 가능한 온도 변 화량의 범위는 각각 156.5/26/13 o C 이다. 위의 예측된 결과 의 검증으로 TE에 따른 온도영상의 신호대잡음비를 평가하 기 위하여, 조직모사팬텀을 마이크로웨이브오븐으로 가열한 후, 식는 동안 TE가 각각 5/30/60 msec인 T 1 경사자계 에 코 펄스열을 이용하여 자기공명영상을 획득하여 온도영상을 재구성하였다. 또한 자기공명영상장치에 호환되는 광섬유온 도센서(Photon Control, Inc.)를 이용하여 부분적인 온도 변화를 확인하였다. 그 결과 자기공명온도영상촬영을 획득 하는 동안 조직모사팬텀 내에서 측정 시작 온도와 비교하여 35 o C 정도가 감소하는 것까지 확인되었다. 자기공명영상으 로부터 재구성된 온도영상의 경우에는 TE가 5 msec일 때 는 위상의 wraparound가 발생하지 않았고, TE가 30 msec 일 때는 측정온도범위가 26 o C 이상으로 변화하였을 때 위 상의 wraparound가 발생하였으며, TE가 60 msec일 때는 SI n
α n ( ) sin --- E 1 SI n
α n ( )
--- M tan + 0 ( 1 E – 1 )
=
T 1 TR m ( ) ln --- –
=
M 0 e
TE
nT
2--- –
T 2 * T 2 *
245
측정온도범위가 13 o C 이상으로 온도가 변화하였을 때 위상 의 wraparound가 발생한 것을 그림 3에서 확인할 수 있 다. 그리고 온도영상의 신호대잡음비를 평가하기 위하여, 관 심영역(Region-Of-Interest)에서 온도신호의 평균값과 표준 편차의 역수를 계산하였다. TE가 이완시간과 같은 30 msec 일 때, 가장 좋은 온도해상도를 그림 4를 통해 확 인할 수 있다.
LL 방법은 경사자계 에코 계열의 펄스열이므로, 숙임각 이 T 1 이완시간의 정확도 결정에 중요한 요소이다. 최적의 숙임각을 찾기 위해서 그림 5는 숙임각에 따라서 LL 방법 을 이용하여 T 1 이완시간을 계산한 영상으로 숙임각이 7~9 o 의 범위를 가질 때, 최대의 T 1 이완시간 대 잡음비를 보였 다. 또한, T 2 이완시간은 mSE 펄스열을 이용하여 계산하므 로 TR이 충분히 길어야 최대의 T 2 이완시간 대 잡음비를 보 이지만 TR의 증가는 영상획득시간의 증가를 초래한다. T 1
이완시간이 280 msec인 조직모사팬텀의 경우, TR이 T 1 이
완시간의 약 3배 이상으로 길어져도, 측정된 T 2 이완시간의 정확도는 거의 향상되지 않는 것을 그림 6을 통해 확인 할 수 있다.
최적화된 재구성 알고리즘과 영상획득조건을 이용하여 T 1
과 T 2 이완시간, 그리고 수소자기공명주파수의 변화를 사용 한 온도측정 방법을 비교하기 위하여 마이크로웨이브오븐 으로 가열한 후 조직모사팬텀의 온도가 감소하는 동안 첫 번째 세트는 T 1 이완시간과 수소자기공명주파수의 온도에 따른 변화량을 통한 자기공명 온도측정 방법을 반복적으로 수행하였고, 두 번째 세트는 T 2 와 수소자기공명주파수의 변 화를 사용한 온도측정 방법을 반복적으로 수행하였다. 그림 7 은 첫 번째 세트의 실험으로 T 1 이완시간과 수소자기공명 주파수의 변화를 통한 자기공명 온도측정 방법의 온도 영상 을 나타내는 것이다. 이 때 두 방법을 이용하여 구한 온도 변화량의 평균값은 거의 비슷하였으나, 수소자기공명주파수 의 변화를 사용한 온도측정 방법의 경우 신호대잡음비가 5 T 2 *
그림 3. 자기공명영상의 TE가 5, 또는 30, 60 msec일 때 (각각 (a), (b), (c)), 수소자기공명주파수의 변화를 통한 온도측정 방법을 이용하 여 재구성한 온도영상. 온도영상은 TE가 5 msec일 때는 위상의 wraparound가 발생하지 않았고, TE가 30 msec일 때는 측정온도범위가 26oC 이상으로 온도가 변화하였을 때 위상의 wraparound가 발생하였으며, TE가 60 msec일 때는 기준 온도와 비교하여 측정온도범위가 13oC 이상으로 온도가 변화하였을 때 위상의wraparound가 발생하였다(흰색 화살표).
Fig. 3. Temperature map acquired using PRFs-based MR thermometry with TE = 5 (a) / 30 (b) / 60 (c) msec during cooling process. Although wrapping in temperature image by using PRFs-based MR thermometry did not occur at TE = 5 msec, wrapping occurred 26oC for TE = 30 msec, and 13oC for TE = 60 msec, respectively (white arrow).
그림 4. TE가 5/30/60 msec일 때, 수소자기공명주파수의 변화량을 통한 자기공명 온도측정 방법을 이용하여 재구성한 온도영상의 평균, (a),과 표준편차의 역수, (b). TE가 이완시간과 같은 30 msec일 때 최대의 온도 해상도를 보였다.
Fig. 4. Mean (left) and inverse standard deviation (right) of temperature map acquired using PRFs-based MR thermometry with TE = 5, 30, and 60 msec during cooling process. Inverse standard deviations of temperature images at TE = 30 msec is higher than that of temperature images at TE = 5 msec and 60 msec.
T 2 *
246
배정도 높다. 그림 8은 두 번째 세트의 실험으로 T 2 이완시 간과 수소자기공명주파수의 변화를 사용한 온도측정 방법의
온도 영상이다. 이 때 두 방법을 이용하여 구한 온도변화량 의 평균값은 거의 비슷하였으나, 수소자기공명주파수를 통
그림 5. (a) Look-Locker 방법을 이용하여 구한 다양한 숙임각으로 얻은 T1영상. (b) 숙임각에 따른 T1영상의 평균값. (c) 숙임각에 따른 T1영상의 표준편차. 숙임각이 8o일 때, 신호대잡음비는 최대가 된다.Fig. 5. (a) T1 map based on the flip angle in Look-Locker method. (b) Mean of T1 map based on the flip angle. (c) Standard deviation of T1 map based on the flip angle. In the Look-Locker method, 8o flip angle gave the best Signal-to-Noise Ratio in T1 measurement.
그림 6. T1의 평균값이 290 msec인 조직모사팬텀의 T2이완시간의 평균값, (a),과 표준편차, (b). TR이 T1이완시간의 약 3배 이상이라면, 측 정된 T2이완시간의 정확도는 거의 증가하지 않는 것을 확인할 수 있다.
Fig. 6. Mean, (a), and standard deviation, (b), of T2 map on TR (mean value of T1 = 290 msec). There is a trade-off between the Signal-to-Noise Ratio and the scan time. Because the net magnetization is almost recovered if TR is more than 3. T1, it is not necessary to use TR longer than 3. T1.
247
한 온도측정 방법의 경우 신호대잡음비가 3배정도 높다.
온도의 변화에 따른 T 1 이완시간의 변화량은 25~45 o C 의 좁은 온도범위에서 낮은 편차로 선형성을 보였지만 그 이상 의 온도에서는 편차가 크게 발생하는 것을 확인할 수 있고, 온도의 변화에 따른 T 2 이완시간의 변화량은 45 o C 이상의 넓은 온도범위에서 선형성을 보였지만 전체적으로 편차가 크게 발생하는 것을 확인할 수 있다(그림 9).
Ⅳ. 토 론
본 논문에서는 T 1 이완시간과 T 2 이완시간, 수소자기공명 주파수의 변화량을 통한 온도측정 방법의 영상획득조건과 재구성알고리즘을 최적화하였고, 이를 이용하여 T 1 과 T 2 이 완시간, 수소자기공명주파수변화를 통한 온도측정 방법의 온 도 해상도, 시간 해상도, 측정가능 온도변화량 범위에 대해 서 이론적 분석을 하였으며, T 1 /T 2 / 이완시간이 280/88/
30 msec 인 조직모사팬텀을 이용하여 열이 투여되지 않을 경 우의 온도변화를 이론적인 예측과 실험측정을 통해 비교 및 분석하였다.
수소자기공명주파수의 변화량을 통한 온도측정 방법에서 는 이완시간과 TE가 거의 같은 값일 경우 최적의 온도
변화량 대 잡음비를 보였다. 또한 이 경우 위상이 0부터 2π 로 제한되어 있기 때문에 TE에 따라서 위상의 wrap 에 의 한 측정가능 온도 변화량 범위의 제한성이 존재한다. 또한, 이 방법은 지방 세포에서는 측정이 불가능하다는 단점이 있 어 이 경우는 T 1 과 T 2 이완시간 등의 변화량을 통한 온도 측정 방법을 이용하는 것이 효과적이다. T 1 이완시간의 온 도에 따른 변화량을 통한 자기공명 온도측정 방법의 경우, 숙임각이 8 o 일 때 최적의 T 1 이완시간 대 잡음비를 보였으 며, 25~45 o C 의 범위에서 강한 선형성을 보였으나 그 이상 의 범위에서는 높은 편차를 보여 측정온도범위는 20 o C 이 내이다. T 1 이완시간의 변화량을 통한 온도측정 방법의 경 우, TR이 T 1 이완시간의 약 3배 이상일 경우, 공간해상도 와 T 2 이완시간 대 잡음비가 최적의 균형을 이루고 있으며, 45 o C 이상의 넓은 범위에서 선형성을 보이므로 넓은 범위 의 온도를 측정할 때 사용이 가능하다.
지방세포를 제외한 온도영상에서는 수소자기공명주파수의 변화량을 통한 온도측정 방법이 효과적이지만, 이 방법은 지 방세포의 경우 온도측정이 어려우므로 T 1 이완시간과 T 2 이 완시간의 변화를 사용한 온도측정 방법을 사용되어야 한다.
T 1 이완시간과 T 2 이완시간, 수소자기공명주파수의 변화량 을 통한 온도측정 방법은 서로 측정 가능한 온도의 범위가 T 2 *
T 2 *
그림 7. (a) 수소자기공명주파수의 변화를 통한 온도측정 방법을 통해 구한 온도 영상. (b) T1이완시간 변화를 통한 온도측정 방법을 통해 구한 온도 영상. (c) 온도영상의 평균값 (d) 온도영상의 표준편차. 두 방법을 이용하여 구한 온도변화량의 평균값은 거의 비슷하였으나, 수소 자기공명주파수의 변화를 사용한 온도측정 방법의 경우 신호대잡음비가 5배정도 높은 것을 볼 수 있다.
Fig. 7. (a) Temperature map using PRFs-based MR thermometry. (b) Temperature map using T1-based MR thermometry.
(c) Mean of temperature maps. (d) Standard deviation of temperature maps. Compared with the PRFs-based MR thermometry, although the temperature change obtained by using T1-based MR thermometry is very similar with that obtained by using PRFs-based MR thermometry, the noise for T1-based MR thermometry is about 5 times higher than that for PRFs-based method.
248
그림 9. 온도의 변화에 따른 T1이완시간의 변화량, (a),과 온도의 변화에 따른 T2이완시간의 변화량, (b). 온도의 변화에 따른 T1이완시간 의 변화량은 특정 온도범위(25~45oC)에서 낮은 편차로 선형성을 보였지만 그 이상의 온도 즉, 45oC 이상에서는 편차가 크게 발생하는 것 을 확인할 수 있다. T2이완시간은 넓은 온도범위에서 선형성을 보였지만 전체적으로 편차가 크게 발생하는 것을 확인할 수 있다.
Fig. 9. The relationship between T1 change and temperature change, (a). The relationship between T2 change and temperature change, (b). In a narrow temperature range under 45oC, T1 relaxation time increases in a linear fashion with reasonable accuracy. Beyond 45oC, there is no correlation between T1 and the temperature. T2 relaxation time increases in a linear fashion in a wide temperature range with less Signal-to-Noise Ratio.
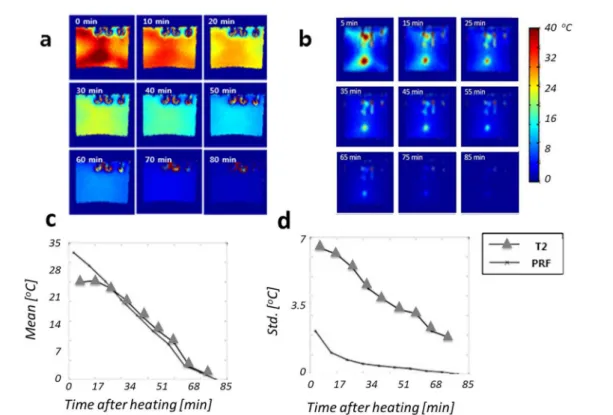
그림 8. (a) 수소자기공명주파수의 변화를 통해 구한 온도 영상. (b) T2이완시간 변화를 통해 구한 온도 영상. (c) 온도영상의 평균값 (d) 온 도영상의 표준편차. 이 때 두 방법을 이용하여 구한 온도변화량의 평균값은 거의 비슷하였으나, 수소자기공명주파수를 통한 온도측정 방법 의 경우 신호대잡음비가 3배정도 높은 것을 볼 수 있다.
Fig. 8. (a) Temperature map using PRFs-based MR thermometry. (b) Temperature map using T2-based MR thermometry.
(c) Mean of temperature maps. (d) Standard deviation of temperature maps. Compared with the PRFs-based MR thermometry, although the temperature change obtained by using T2-based MR thermometry is very similar with that obtained by using PRFs-based method, the noise level of temperature map by using T2-based MR thermometry is about 3 times higher than that of temperature map by using PRFs-based method.
249 다르므로 측정온도범위가 20 o C 이내인 응용에서는 T 1 이완
시간의 변화를 통한 온도측정 방법과 측정온도범위가 20 o C 이상인 응용에서는 T 2 이완시간의 변화를 통한 자기공명 온 도측정 방법을 사용하여야 한다(표 1).
본 연구 결과에 따르면 응용분야에 따른 최적의 온도영상 방법은 다음과 같다. 36.5~45 o C의 온도 범위에서 활용하는 RF hyperthermia 의 경우 최적의 온도 측정 방법은 수소 자기공명주파수의 변화량을 이용하는 방법이다. 따라서 최 적화된 영상획득조건과 재구성 알고리즘의 수소자기공명주 파수의 변화량을 통한 온도측정을 이용하여 고주파 온열기 를 치료하는 동안 높은 시간해상도와 온도해상도의 온도영 상을 얻을 수 있다[15]. 하지만 지방조직이 포함되어 있는 인체에 적용할 경우 수소자기공명주파수의 변화량을 이용하 는 방법은 사용에 제한이 있으므로 T 1 이완시간과 수소자기 공명주파수의 변화를 통한 온도측정 방법을 이용하였을 때 더 정확한 온도 추정이 가능할 것으로 예상된다. 50 o C 이 상의 온도 범위에서 임상에 적용되는 고강도 집속초음파치 료 기술의 경우에는 T 2 이완시간과 수소자기공명주파수의 변화를 통한 온도측정 방법을 이용하여 온도를 추정하였을 때, 최적의 온도 추정이 가능할 것으로 예상된다.
온열치료 동안 환자의 안전을 보장하기 위해서는 국부적 온도의 측정이 가능해야 하는데 자기공명온도영상 방법은 온도의 변화량을 측정하는 것이 가능하게 해준다. 이 때, 정 확한 온도 변화량을 측정하기 위해서는 최적의 자기공명온 도영상이 필요한데, 유한요소해석법이나 Pennens-Bioheat 공식을 이용한 시뮬레이션을 통해 예상 온도의 범위를 측정 하고 이에 맞는 최적의 자기공명온도영상을 선택할 경우 높 은 온도와 시간 해상도의 온도 측정이 가능할 것으로 예상 된다.
V. 결 론
본 연구에서는 T 1 이완시간과 T 2 이완시간, 수소자기공명 주파수의 온도에 따른 변화량을 통한 온도측정 방법을 온도 의 범위에 따라서 최적화하였다. 영상획득조건과 재구성 알 고리즘의 선택을 고려하여 최선의 영상촬영 파라미터와 프 로토콜을 선택하였다. 이론적 예측과 이를 실험적으로 확인
하였다. 온도의 범위에 따라 최적화된 자기공명온도영상방 법은 고주파 온열기와 집속초음파 등의 자기공명영상유도 온열치료의 안전성 확보에 기여할 것으로 예상된다.
Reference
[1] C.J. Lewa, and Z. Majewska, “Temperature relationships of proton spin-lattice relaxation time T1 in biological tissues,”
Bulletin Du Cancer, vol. 67, no. 5, pp. 525-530, 1979.
[2] S.J. Graham, M.J. Bronskill, and M. Henkelman, “Time and temperature dependence of MR parameters during thermal coagulation of ex vivo rabbit muscle,” Magn Reson Med, vol. 39, no. 2, pp. 198-203, 1998.
[3] Y. Ishihara, A. Calderon, H. Watanabe, K. Okamoto, Y.
Suzuki, K. Kuroda, and Y. Suzuki, “A precise and fast tem- perature mapping using water proton chemical shift,” Magn Reson Med, vol. 34, no. 6, pp. 814-823, 1995.
[4] M.E. Moseley, Y. Cohen, J. Mintorovitc, L. Chileuitt, H.
Shimizu, J. Kucharczyk, M.F. Wendlan, and P.R. Weinstein,
“Early detection of regional cerebral ischemia in cats: com- parison of diffusion?and T2?weighted MRI and spectros- copy,” Magn Reson Med, vol. 14, no. 2, pp. 330-346, 1990.
[5] I.R. Young, J.W. Hand, A. Oatridge, and M.V. Prior, “Mod- eling and observation of temperature changes in vivo using MRI,” Mag Reson Med, vol. 32, no. 3, pp. 358-369, 1994.
[6] V. Rieke, and K.B. Pauly, “MR thermometry,” J Magn Reson Imag, vol. 27, no. 2, pp. 376-390, 2008.
[7] S. Oh, Y.C. Ryu, G. Carluccio, C.T. Sica, and C.M. Collins,
“Measurement of SAR?induced temperature increase in a phantom and in vivo with comparison to numerical simula- tion,” Magn Reson Med, vol. 71, no. 5, pp. 1923-1931, 2014.
[8] R.M. Goldstein, H.A. Zebker, and C.L. Werner, “Satellite radar interferometry: Two-dimensional phase unwrapping,”
Radio Sci, vol. 23, no. 4, pp. 713-720, 1988.
[9] J.D. Poorter, “Noninvasive MRI thermometry with the pro- ton resonance frequency method: study of susceptibility effects,” Mag Reson Med, vol. 34, no. 3, pp. 359-367, 1995.
[10] P.A. Bottomley, T.H. Foster, R.E Argersinger, and L.M. Pfe- ifer, “A review of normal tissue hydrogen NMR relaxation times and relaxation mechanisms from 1-100 MHz: depen- dence on tissue type, NMR frequency, temperature, species, excision, and age,” Med Phys, vol. 11, pp. 425-448, 1984.
[11] A.P. Crawley, and R.M. Henkelman, “A Comparison of One- Shot and Recovery Methods in T1 Imaging,” Magn Reson Med, vol. 7, no. 1, pp. 23-24, 1988.
[12] I. Kay, and R.M. Henkelman, “Practical Implementation and Optimization of One-Shot T1 Imaging,” Magn Reson Med, 표 1. T1이완시간과 T2이완시간, 수소자기공명주파수의 온도에 따른 변화량을 통한 자기공명 온도측정 방법의 비교표.
Table 1. Comparison table between PRFs, T1, and T2-based MR Thermometry.
Methods Temperature resolution Temporal resolution Measurable temperature range Fat component
PRFs +++ +++ ++ +
T1 ++ +++ + ++
T2 + + +++ +++