301
책임저자: 김민찬, 부산시 서구 동대신동 3가 1번지
602-715, 동아대학교 의과대학 외과학교실 Tel: 051-240-2643 Fax: 051-247-9316
E-mail: [email protected]
접수일:2008년 11월 26일, 게재승인일:2009년 1월 28일 이 논문은 동아대학교 학술연구비 지원에 의하여 연구되었음.
위암 환자에서 da Vinci
ⓇSurgical System을 이용한 위절제술의 초기 경험
동아대학교 의과대학 외과학교실, 1내과학교실
허건웅ㆍ김민찬ㆍ정갑중ㆍ최석렬
1Robotic Gastrectomy for Gastric Cancer: Preliminary Results
Geon-Ung Heo, M.D., Min-Chan Kim, M.D., Ghap-Joong Jung, M.D., Seok Reyol Choi, M.D.1 Departments of Surgery and 1Internal Medicine, Dong-A University College of Medicine, Busan, Korea
Purpose: To assess the feasibility of the da VinciⓇ surgical system in performing gastrectomies for gastric cancer.
Methods: Between 31 December 2007 and 30 June 2008, twenty patients underwent robotic gastrectomies using the da VinciⓇ surgical system for gastric cancer. Retrospectively, clinicopathologic and postoperative surgical out- comes were retrieved from the Stomach Cancer Database at Dong-A University Medical Center.
Results: Two patients with serosa invasion required conversion to laparotomy. Seventeen robotic distal gastrec- tomies and one robotic total gastrectomy were performed. Most patients underwent D1+β or D2 lymph node dissection. The average number of retrieved lymph nodes was 41. Mean operative time was 271 minutes. Estimated blood loss was 30 ml and mean postoperative hospital stay was 5.1 days. No postoperative complications were reported.
Conclusion: While application of robotic technology for gastric cancer is technically feasible, problems of long operative times and extremely high costs remain. More randomized studies comparing long-term surgical outcomes between robotic, conventional open, and laparoscopic surgery are needed. (J Korean Surg Soc 2009;76:301-306) Key Words: da VinciⓇ surgical system, Robotic gastrectomy, Gastric cancer
중심 단어: da VinciⓇ surgical system, 로봇 위절제, 위암
서 론
최근 우리나라에서는 일반인의 수명 연장과 내시경의 발 전 및 원활한 건강 검진 시스템의 구축으로 인하여 위암의 조기 진단이 늘고 있다.(1) 더욱이 조기 위암은 수술적 치료 만으로 90% 이상을 상회하는 완치율을 보임으로 수술 후 환자의 삶의 질에 대하여 환자와 외과의사 모두 큰 관심을
갖게 되어 환자의 삶의 질을 고려한 최소 침습적 수술이 각광을 받고 있다.(2-5)
최소 침습 수술로 대표되는 복강경 수술은 현재 전 외과 영역에 가히 혁명적 변화를 일으키고 있는데 담낭 결석에 서는 복강경 담낭 절제술이 개복 담낭 절제술을 대신하여 표준화 수술로 인정되었으며 양성 질환 뿐만 아니라 위암 을 포함한 악성 질환에서도 복강경 수술이 일부 환자에서 가능하게 되었다.(6-8) 국내에서는 1990년에 들어서 양성 위장 질환에서 복강경 위 수술이 시작되었고 Hwang 등(9) 에 의해 처음으로 조기 위암에서도 시행되었다. 복강경 위 장관 연구회의 발족과 함께 2002년 이후 국내에서 급속히 확산되어 2007년 한해 2,000예 이상의 복강경 위절제술이 시행되었으며,(10) 2006년부터 국내 연구자들에 의해 전 세
Fig. 1. Arrangement of the operating room and robot.
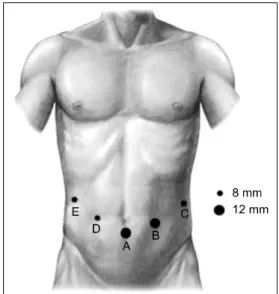
Fig. 2. The locations of port in robotic gastrectomy. (A) Camera port, (B) Assist port, (C) First arm, (D) Second arm, (E) Third arm.
계에서 처음으로 위암에서의 개복 수술과 복강경 수술의 다기관 전향적 연구가 시행 중이다.
또한 복강경 수술 환경이라고 할 수 있는 기복(pneumo- peritoneum) 하에서 투관침을 이용하여 복강경 수술 기구 대 신 원격 조절과 관절 운동이 가능한 수술 기구를 이용한 수술, 즉 로봇 수술이 1990년부터 소개되기 시작하여 최근 da VinciⓇ surgical system (Intuitive Surgical Inc, Sunnyvale, CA, USA)에 이르렀다.(11) 전립선암에서 주로 이용되던 da VinciⓇ surgical system은 림프절 절제술과 같이 섬세하고 복 잡한 조작이 필요한 위암 수술에서 복강경 수술보다 편리 할 수 있다는 보고 이후 몇몇 연구자들에 의해 수술 경험들 이 보고되었으나 미흡한 상태이다.(12-16)
이에 저자들은 위암 환자에서 da VinciⓇ surgical system을 이용한 위절제술의 가능성을 알아보기 위하여 초기 경험을 분석하여 보고하고자 한다.
방 법
1) 대상
2007년 12월 31일부터 2008년 6월 30일까지 동아대학교 의료원에서 da VinciⓇ surgical system으로 수술 받은 20명의 위암 환자를 대상으로 위암 데이터 베이스를 이용하여 수 술 결과들에 대한 후향적 분석을 시행하였다.
수술의 적응증은 최근 복강경 수술의 적응증과 동일하게 cT2N1M0이하의 위선암 환자를 대상으로 하였으며, ASA score 3초과 환자와 동반 질환이 3개 이상인 환자, 이전 복
부 수술의 병력이 있는 자는 제외하였다. 수술팀은 로봇 교 육을 완료한 4명의 수술실 간호사들 중 한 명과 위암 전임 의가 주로 수술에 참여하였지만 때에 따라 3년 차 전공의가 제1조수로 참여하기도 하였다.
2) 수술 방법
수술실의 로봇과 수술대 및 마취의 배치는 Fig. 1과 같으 며 수술 중 환자의 자세는 다리를 벌리지 않고 머리를 약 30도 가량 높인 상태이다. 수술 시 출혈량은 거즈 무게와 흡입기의 양으로 계산하였다.
(1) 투관침 삽입: 투관침의 위치는 Fig. 2와 같으며 하나의 복강경용 카메라 투관침(12 mm)과 세 개의 로봇팔을 위한 로봇 전용 8 mm 투관침이 필요하며 제1조수를 위한 하나의 보조 투관침이 필요하였다. 각 투관침의 거리는 최소 5∼6 cm이어야 하고 7∼8 cm 이상이면 로봇팔의 움직임이 용이 하다. 로봇을 장착시키기 전 Prolene 2-0 직침을 이용하여 간 좌엽을 찔러 복벽으로 견인하였다.
(2) 로봇 장착:최신 da Vinci-SⓇ surgical system은 전동 바 퀴가 장착되어 있어 로봇의 이동이 비교적 쉽지만 정확한 위치로 움직이기 위해서는 환자의 침대를 움직이는 것이 조금 더 용이하다. 로봇 본체의 좌우와 환자의 머리와 다리 의 축이 직각이 되도록 하여야 하며 로봇 장착 후 수술 테 이블의 변화가 불가능하므로 이를 감안하여 로봇 장착 전 수술 테이블의 높이와 기울기를 한 번 더 확인하여야 한다.
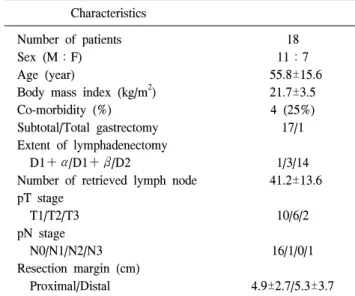
Table 1. Clinicopathologic characteristics of patients Characteristics
Number of patients 18
Sex (M:F) 11:7
Age (year) 55.8±15.6
Body mass index (kg/m2) 21.7±3.5
Co-morbidity (%) 4 (25%)
Subtotal/Total gastrectomy 17/1
Extent of lymphadenectomy
D1+α/D1+β/D2 1/3/14
Number of retrieved lymph node 41.2±13.6 pT stage
T1/T2/T3 10/6/2
pN stage
N0/N1/N2/N3 16/1/0/1
Resection margin (cm)
Proximal/Distal 4.9±2.7/5.3±3.7
Values are mean±standard deviation.
Table 2. Postoperative outcomes
Value Estimated blood loss (ml) 30.3±15.1 Operation time (min.)
Docking time 6.9±4.3
Console time 166.1±38.2
Total time 271.6±51.3
Postoperative hospital stay (days) 5.1±0.3 First flatus time (days) 3.2±1.1
Postoperative complication 0
Values are mean±standard deviation.
(3) 기구 삽입: 처음으로 카메라를 삽입하고 카메라 및 로 봇 수술 기구를 수동으로 조정하여 복강 내 장기 손상을 방지하면서 로봇 수술 기구를 복강 내로 삽입한다.
(4) 주조절장치(surgeon console)에서의 수술: 복강 내 수술 의 전반적인 과정은 복강경 수술과 동일하며 초음파 절단 기의 위치가 복강경 수술에서는 술자의 오른손이지만 로봇 수술에서는 왼손으로 수술하였다. 위 혹은 췌장의 견인이 나 클립 및 자동절단기(stapler)의 조작과 거즈 출입을 위한 제1조수의 도움이 필요하다.
(5) 로봇의 분리: 십이지장 절단과 림프절 절제가 끝난 후 로봇을 환자로부터 분리한다.
(6) 재건술: 복강경 보조 수술과 마찬가지로 상복부에 4∼
5 cm의 복부를 절개하여 위를 절제하고 문합술을 시행하였 고 13번째 환자부터는 문합술을 전복강경 하 위공장문합을 시행하고 검체를 비닐 백에 담아 제대 투관침을 조금 더 절개하여(약 2.5∼3.5 cm) 검체를 몸 밖으로 제거하였다.
(7) 수술 후 환자 관리: 본원에서 위암 수술 후 환자 관리는 개복 및 복강경 수술 방법에 상관없이 일정한 임상 경로 (clinical pathway)가 적용되는데 수술 후 만 48시간에 물, 3 일째 미음, 4일째 죽으로 식이 진행을 시키고 5∼6일째 퇴 원을 권유하였다. 전위절제술인 경우 하루씩 늦게 진행하 였고, 수술 후 통증은 정맥 자가통증조절기로 조절하였다.
결 과
총 20명의 로봇 수술 계획 환자 중 로봇 복강경 시야에서 장막 침윤이 의심된 2명의 환자에서는 개복 수술로 전환이 이루어졌으며 17명에서 원위부 위아전절제술을, 1명에서 전위절제술을 로봇을 이용하여 시행하였다. 로봇 수술 도 중 개복술 혹은 복강경 수술로의 전환은 없었다.
로봇 수술이 성공적으로 시행된 18명의 환자 중 남자는 11명, 여자는 7명이었으며 평균 나이는 55.3세이었다. 평균 비만도는 21.7 kg/m2였고 4명(25%)의 환자는 동반 질환을 가지고 있었다.
수술 후 병리조직 검사 결과에서는 제거된 림프절 수는 41.1 (16∼68)개였고, 원위부 및 근위부의 절단면의 길이도 각각 평균 4.9 (1.5∼9.5) cm와 5.3 (1.5∼17.5) cm였다. 원발 종양의 침습도는 T1 10명, T2 6명, T3 2명이었고 림프절 전 이는 T3 환자에서 1명, T1 환자에서 1명에서 있었다(Table 1).
수술 시간은 로봇을 장착하는 docking time이 평균 6.9분 소요되었으며 로봇을 직접 조정하여 수술하는 console time
은 평균 166분, 전체 수술 시간은 평균 271분이 소요되었다.
림프절 절제 범위는 14명의 환자에서 D2를 시행하였고 전 위절제술이 시행된 환자를 포함하여 3명의 환자에서 D1+
β, 비만도가 높았던 세 번째 환자 1명에서 D1+α를 시행하 였다. 수술 중 출혈량은 평균 30 (7∼63) ml이었고 수술 후 재원 기간은 평균 5.1일로 전위절제술 환자의 7일을 제외하 면 대부분 수술 후 5일째 퇴원이 가능하였다(Table 2, Fig.
3). 합병증 발생은 없었다. 전 예에서 수술 중 동결 조직 검 사를 통하여 절단면의 암 조직의 유무를 확인하였다.
고 찰
da VinciⓇ surgical system은 통합된 3-D입체영상모니터를 탑재한 주조절장치(surgeon console), 네 개의 로봇 팔이 있
Fig. 3. Operation time of each patient.
Fig. 4. Photograph of da VinciⓇ surgical system. (A) Surgeon console, (B) Surgical cart, (C) Vision cart.
는 로봇 본체(surgical cart), 그리고 입체 영상을 만들기 위한 장치(vision cart)의 세 부분으로 구성되어 있다(Fig. 4). 인간 의 자연스러운 손 떨림과 손놀림의 거울 효과 등의 복강경 수술의 단점을 극복하기 위하여 외과의사와 수술기구의 손 잡이가 직접적으로 연결되지 않는 주-종속 제어조작기 (master-slave manipulator)가 개발되었으며 3-D입체 영상의 기술과 사람의 손목 자유도를 능가하는 endowrist의 기능이 da VinciⓇ surgical system의 핵심 기술들이라 할 수 있다.
세계적으로 인간에서 첫 로봇 수술은 1997년 3월 Cardiere 등에 의해 담낭절제술이 보고되었다.(17) 그 후 관상동맥 우회술, 위저추벽성형술, 비만 수술, 비장 절제술 등의 외과 수술과 흉부외과, 비뇨기과, 산부인과 영역의 다양한 수술 에서 로봇이 이용되었다.(18-23)
da VinciⓇ surgical system을 이용한 로봇 수술의 도입은 기존의 복강경 수술이 가지는 한계를 극복하고자 하는 노 력에서 시작되었다고 할 수 있다. 현재 이용되고 있는 da VinciⓇ surgical system은 수술기구의 자유도 증가, 손떨림의 제거, 지렛대 현상의 극복, 인체공학적 자세를 통한 피로도 의 감소, 최소한의 장조작, 3차원 입체 영상과 감염 등의 위 험에서 수술자를 보호할 수 있는 많은 장점을 갖고 있다.
이러한 장점을 갖는 로봇 수술은 최근 외과 영역의 큰 관심 인 최소 침습 수술을 실현하는데 현재까지 개발된 장비들 중 최고라 할 수 있다.
현재까지 로봇을 이용한 위암 수술의 보고는 매우 드물 다. 가장 처음으로 2003년 일본의 Hashizume와 Sugimachi (15)가 조기 위암 환자에서 다양한 내시경 및 복강경 수술 의 소개와 함께 로봇의 유용성을 언급하였다. 특히 저자들 은 로봇을 이용한 위절제술에서 다양한 각도가 요구되는 림프절 절제술이나 출혈 시 혈관의 결찰, 문합부 봉합 등에 서 복강경 수술 보다 로봇 수술이 수월할 수 있음을 주장하 였다. 또한 위암을 포함한 외과 영역 대부분의 수술을 da VinciⓇ surgical system으로 시행하여 그 가능성을 주장한 보 고도 있다.(16) 뿐만 아니라 이탈리아와 미국 등에서도 로 봇을 이용한 위암 수술이 기술적으로 가능하며 우수한 임 상 결과를 보고하였다.(13,24)
국내에서 외과 영역에서의 로봇 수술은 Kim 등(25)에 의 해 처음으로 보고되었는데 암퇘지 5마리에서 담낭 절제술 5예, 위저부추벽형성술 5예, 총담관단단문합술 5예, 위공장
문합술 5예를 시행하여 복잡한 문합 술기에서 보다 효율적 임을 보고하였다. 임상에서 2005년 5월 처음으로 da Vinci system이 국내에 도입되어 7월 환자에서 담낭절제술이 시 행되었으며 2008년 3월까지 11개 병원에 14대의 da VinciⓇ surgical system이 도입되어 임상에 사용되고 있다. 최근 80 명 위암 환자의 로봇을 이용한 위절제술에 대한 우수한 결 과가 보고되기도 하였으나,(26) 매우 제한된 병원에서 시행 되고 있으며 점차 여러 소화기암과 갑상선 및 부인과 질환 으로 그 영역이 확대되고 있다. 본원은 2007년 11월 da VinciⓇ surgical system이 도입되어 2008년 8월 말까지 총 63 명의 환자에서 로봇 수술이 시행되었으며 질환에 따른 환 자 수는 전립선암 40명, 위암 20명, 부인과 1명, 식도암 1명, 간내결석 1명이었다.
저자의 경험으로 로봇을 이용한 위암 수술에서 최종병리 조직 검사 상 림프절 절제수는 충분하였으며 수술 중 출혈 량도 적었다. 수술 직후의 환자의 경과는 복강경 수술 환자 와 거의 유사하였으나 수술 후 재원 일수는 5.1일로 복강경 수술 환자보다는 조금 더 빠른 것으로 나타났다. 수술 후 통증이 적고, 장조작이 적음으로 인한 빠른 장회복이 이유 로 생각된다. 환자의 평균 비만도가 21.7 kg/m2로 제한된 환 자에서 시행하였는데 Hyung 등(27)의 연구에 따르면 복강 경 수술의 초기 비만도가 낮은 여자 환자에서 수술 시간이 짧은 것으로 나타나 저자들도 주로 25 kg/m2 이하의 여자 환자를 선택하고자 하였다. 또한 수술 전 환자의 동반 질환 이 복강경 수술 후 발생하는 합병증 발생에 크게 영향이 있는 것으로 나타나 ASA score가 3 이하 및 동반 질환의 수가 세 개 이하인 환자로 제한하여 수술 후 합병증 발생을 최소화 하고자 하였다.(28) 수술 시간은 평균 271분으로 복 강경 수술 시간보다는 길었으나 초기 경험을 고려한다면 그렇게 길지는 않다고 생각되며 로봇을 장착하는 시간 (docking time)은 평균 6.9분으로 빠른 시간에 가능하였다.
다만 투관침을 삽입하고 간좌엽을 찔러 복벽으로 견인하는 조작이 생각보다 쉽지 않았으며 약간의 간출혈도 초래하여 간의 크기가 큰 환자에서 간 견인의 방법은 로봇 수술에서 풀어야 할 또 하나의 숙제라고 생각된다. 최근 복강경 위암 수술에 대한 학습곡선의 연구가 많이 시행되었는데 비교적 초기 단계에서는 50명이 제안되었고 교육 시설의 발전과 저변 확대로 최근에는 대부분의 연구에서 30명으로 제안되 고 있다.(29,30) 로봇 수술의 학습곡선은 아직까지 적은 환 자 수로 분석적 증명은 힘들지만 복강경 수술에 익숙한 외 과의사의 경우 10명이라고 생각한다.
현실적으로 로봇 수술에 제기되는 문제들은 수술시간이 길고 고비용이라는 점이다. 수술시간은 경험이 쌓일수록 어느 정도 단축되리라 생각되며 복강경 수술과 비교하여 거의 두 배에 가까운 비용은 환자뿐만 아니라 외과의사에 게도 큰 부담이며 나아가 국내 의료비 상승이라는 문제를 갖게 된다. 하지만 복강경 수술 처음 당시 고비용과 종양외 과적인 많은 문제를 극복하고 오늘에 이른 것을 인식한다 면 로봇 수술의 장점에 대한 연구를 활성화 하여 환자뿐만 아니라 외과의사 측면에서도 개복과 복강경 수술에 비해 어떠한 장단점들이 있는지 밝혀야 할 것이다. 또한 da VinciⓇ surgical system과 같은 고가의 장비를 이용한 교육은 현재 의 프로그램과는 다른 형태가 필요할 것으로 생각된다.
결 론
da VinciⓇ surgical system을 이용한 위암 수술은 기술적으 로 가능하였으나 수술시간의 단축이 필요하고 고비용의 문 제가 해결되어야 한다. 향후 개복 및 복강경 수술과의 비교 연구 및 장기 생존에 대한 연구가 필요하다.
REFERENCES
1) Park KK. Laparoscopic surgery for gastric cancer. Korean J Gastroenterol 2005;45:9-16.
2) Adachi Y, Shiraishi N, Kitano S. Modern treatment of early gastric cancer: review of the Japanese experience. Dig Surg 2002;19:333-9.
3) Asao T, Hosouchi Y, Nakabayashi T, Haga N, Mochiki E, Kuwano H. Laparoscopically assisted total or distal gas- trectomy with lymph node dissection for early gastric cancer.
Br J Surg 2001;88:128-32.
4) Shehzad K, Mohiuddin K, Nizami S, Sharma H, Khan IM, Memon B, et al. Current status of minimal access surgery for gastric cancer. Surg Oncol 2007;16:85-98.
5) Adachi Y, Suematsu T, Shiraishi N, Katsuta T, Morimoto A, Kitano S, et al. Quality of life after laparoscopy-assisted Billroth I gastrectomy. Ann Surg 1999;229:49-54.
6) Cuschieri A, Dubois F, Mouiel J, Mouret P, Becker H, Buess G, et al. The European experience with laparoscopic cholecys- tectomy. Am J Surg 1991;161:385-7.
7) Baek JH, Kwak SS. Clinical review of laparoscopic cholecys- tectomy. J Korean Surg Soc 2000;58:259-64.
8) Nakajima T. Gastric cancer treatment guidelines in Japan.
Gastric Cancer 2002;5:1-5.
9) Hwang CK, Kim HH, Cho SH, Kim SS, Choi SY, Park HS.
Laparoscopic surgery for gastric and duodenal disease. J
Korean Surg Soc 2000;58:538-43.
10) Kim HH, Kim KH, Kim DH, Kim C, Kim BS, Kim YW, et al. Nationwide survey of laparoscopic gastric surgery in Korea, 2004. J Korean Gastric Cancer Assoc 2005;5:295-303.
11) Lunca S, Bouras G, Stanescu AC. Gastrointestinal robot-as- sisted surgery. A current perspective. Rom J Gastroenterol 2005;14:385-91.
12) Kakeji Y, Konishi K, Ieiri S, Yasunaga T, Nakamoto M, Tanoue K, et al. Robotic laparoscopic distal gastrectomy: a comparison of the da Vinci and Zeus systems. Int J Med Robot 2006;2:299-304.
13) Anderson C, Ellenhorn J, Hellan M, Pigazzi A. Pilot series of robot-assisted laparoscopic subtotal gastrectomy with ex- tended lymphadenectomy for gastric cancer. Surg Endosc 2007;21:1662-6.
14) Ballantyne GH. Telerobotic gastrointestinal surgery: phase 2--safety and efficacy. Surg Endosc 2007;21:1054-62.
15) Hashizume M, Sugimachi K. Robot-assisted gastric surgery.
Surg Clin North Am 2003;83:1429-44.
16) Giulianotti PC, Coratti A, Angelini M, Sbrana F, Cecconi S, Balestracci T, et al. Robotics in general surgery: personal ex- perience in a large community hospital. Arch Surg 2003;138:
777-84.
17) Cadiere GB, Himpens J, Germay O, Izizaw R, Degueldre M, Vandromme J, et al. Feasibility of robotic laparoscopic sur- gery: 146 cases. World J Surg 2001;25:1467-77.
18) Falk V, Gummert JF, Walther T, Hayase M, Berry GJ, Mohr FW. Quality of computer enhanced totally endoscopic coro- nary bypass graft anastomosis--comparison to conventional technique. Eur J Cardiothorac Surg 1999;15:260-5.
19) Cadiere GB, Himpens J, Vertruyen M, Bruyns J, Fourtanier G. Nissen fundoplication done by remotely controlled robotic technique. Ann Chir 1999;53:137-41.
20) Cadiere GB, Himpens J, Vertruyen M, Favretti F. The world's first obesity surgery performed by a surgeon at a distance.
Obes Surg 1999;9:206-9.
21) Chapman WH 3rd, Albrecht RJ, Kim VB, Young JA, Chitwood WR Jr. Computer-assisted laparoscopic splenectomy with the da Vinci surgical robot. J Laparoendosc Adv Surg Tech A 2002;12:155-9.
22) Abbou CC, Hoznek A, Salomon L, Lobontiu A, Saint F, Cicco A, et al. Remote laparoscopic radical prostatectomy carried out with a robot. Report of a case. Prog Urol 2000;10:520-3.
23) Degueldre M, Vandromme J, Huong PT, Cadiere GB.
Robotically assisted laparoscopic microsurgical tubal rean- astomosis: a feasibility study. Fertil Steril 2000;74:1020-3.
24) Pugliese R, Maggioni D, Sansonna F, Ferrari GC, Forgione A, Costanzi A, et al. Outcomes and survival after laparoscopic gastrectomy for adenocarcinoma. Analysis on 65 patients oper- ated on by conventional or robot-assisted minimal access pro- cedures. Eur J Surg Oncol 2009;35:281-8.
25) Kim HH, Sung KT. Various laparoscopic surgery using da VinciTM robotic system in pig mode--pilot study. J Korean Surg Soc 2002;63:175-8.
26) Hyung WJ. Robotic surgery in gastrointestinal surgery. Korean J Gastroenterol 2007;50:256-9.
27) Hyung WJ, Song C, Cheong JH, Choi SH, Noh SH. Factors influencing operation time of laparoscopy-assisted distal sub- total gastrectomy: analysis of consecutive 100 initial cases.
Eur J Surg Oncol 2007;33:314-9.
28) Kim MC, Kim W, Kim HH, Ryu SW, Ryu SY, Song KY, et al. Risk factors associated with complication following lapa- roscopy-assisted gastrectomy for gastric cancer: a large-scale Korean multicenter study. Ann Surg Oncol 2008;15:2692-700.
29) Kim MC, Jung GJ, Kim HH. Learning curve of laparo- scopy-assisted distal gastrectomy with systemic lymphadenec- tomy for early gastric cancer. World J Gastroenterol 2005;11:7508-11.
30) Kim JH, Jung YS, Kim BS, Jeong O, Lim JT, Yook JH, et al. Learning curve of a laparoscopy assisted distal gastrectomy for a surgeon expert in performing a conventional open gastrectomy. J Korean Gastric Cancer Assoc 2006;6:167-72.