수동형 시역전 기반의 음선 기반 블라인드 디컨볼루션 기법을 이용한 수중음향통신 성능 개선
Performance improvement of underwater acoustic communication using ray-based blind deconvolution in passive time reversal mirror
오세현, 변기훈, 김재수*†
(Se Hyun Oh, Gi Hoon Byun, and J. S. Kim*†)
한국해양대학교 해양과학기술전문대학원, *한국해양대학교 해양공학과 (Received July 18, 2016; revised August 25, 2016; accepted September 20, 2016)
초 록: 본 논문은 음선 기반 블라인드 디컨볼루션 기법을 이용한 수동형 시역전의 통신성능 향상에 대한 결과를 제시한다. 기존의 수동형 시역전에서 복원되는 신호는 수신된 탐침신호의 정합필터를 통해 구해진다. 하지만 수신된 탐침신호는 각 데이터 프레임의 채널 시변동을 반영하지 못하므로 복원된 신호의 통신 성능은 저하된다. 본 연구에서 는 음선 기반 블라인드 디컨볼루션 기법을 이용하여 각 데이터 프레임의 채널 시변동이 반영된 전달함수를 모두 추정 하고, 추정된 전달함수를 이용하여 수동형 시역전을 수행한다. 해상실험 데이터로부터 제안한 기법이 기존의 수동형 시역전보다 향상된 통신성능 결과를 보여준다.
핵심용어: 음선 기반 블라인드 디컨볼루션, 수동형 시역전, 전달함수, 비트오류율
ABSTRACT: This paper presents the results for the performance improvement of underwater communication in a passive time reversal mirror (PTRM) using ray-based blind deconvolution (RBD). In conventional PTRM, the signal to be recovered is found from matched-filtering the received probe signal. However, the communication performance is degraded because the time-varying impulse response for each data frame is not reflected in the received probe signal. In this study, the time-variant transfer function is estimated from each received data frame using RBD, and the estimated time-variant transfer function is then used to recover the data signal using PTRM.
The results from the experimental data show that the suggested method improves the communication performance when comparing with the conventional PTRM.
Keywords: Ray-based blind deconvolution, Passive time reversal mirror, Transfer function, Bit error rate
PACS numbers: 43.60.Dh, 43.60.Tj, 43.60.Fg
†Corresponding author: J. S. Kim ([email protected]) Department of Ocean Engineering, Korea Maritime and Ocean University, 727 Taejong-ro, Youngdo-gu, Busan 49112, Republic of Korea
(Tel: 82-51-410-4325, Fax: 82-51-403-4320)
http://dx.doi.org/10.7776/ASK.2016.35.5.375 eISSN : 2287-3775
I. 서 론
수중에서의 통신은 수중매질의 특성상 전달 손실 이 적은 음파를 사용하며, 음파의 전달 특성은 수심, 수온 및 염도에 따른 음속 구조에 지배적인 영향을 받는다. 또한 육상에서의 전파통신보다 가용 주파수 가 낮아 신호의 대역폭에 제한이 따르며, 해양 도파
관 구조에 따른 경계면에서의 다중경로로 인한 지연 확산과 환경적 혹은 인위적인 이동에 의한 도플러 확산이 발생한다. 이로 인하여 인접 심볼 간 간섭이 커지고 통신신호의 왜곡이 발생하여 통신성능이 저
하된다.[1-3] 이러한 문제들을 극복하기 위해서 적응
형 신호처리 알고리즘을 이용한 등화기법 등이 사용 되어 왔으나, 적응 등화기법은 정확한 채널 추정을 필요로 하므로 지연확산에 따른 탭 수 산정 및 시변 동에 따른 변수 갱신이 요구된다. 이외에도 빔 형성 기법, 공간 다이버시티 및 시역전 등의 기술을 이용
Fig. 1. A diagram of the passive time reversal mirror.
한 신호 보상에 관한 연구가 진행되어 왔다.[1,4-6]
시역전 기술은 1970년대 가역성의 원리에 근거하 여 광학분야에서 처음 도입되었고 이후 수중에 적용 되었으며,[5,6] 국내 · 외 수중음향통신 분야에서 자기 등화 기술로써 수동형 시역전 기술의 적용 연구 및 실험을 통한 검증을 수행하였다.[6-11]
수동형 시역전의 경우 탐침 신호를 이용하여 수신 채널별 임펄스 응답을 산출하며, 이를 이용하여 수 치적 정합필터를 수행함으로써 수동형 시역전 신호 를 계산한다. 따라서 신호 패킷 구성 시 전달함수 산 출을 위한 탐침 신호가 포함되어야 하며, 하나의 탐 침 신호에 여러 개의 데이터 프레임이 한 패킷을 구 성하는 경우, 하나의 탐침 신호가 모든 데이터 프레 임의 채널 시변동을 반영하지 못하므로, 수동형 시 역전 기술을 이용해 복원된 신호의 통신성능은 저하 된다.
최근 수신기 배열단에 수신된 신호만을 이용하 여 송신 신호 및 전달함수를 추정하는 음선 기반 블 라인드 디컨볼루션(Ray-based Blind Deconvolution, RBD) 기법이 연구되었으며,[12,13]국내· 외에서 RBD 기법을 기반으로 한 이론적 연구와 실험이 이루어지고 있 다.[12-15]
본 논문에서는 RBD 기법을 적용하여 각 데이터 프레임으로부터의 전달함수를 추정하고, 추정된 전 달함수를 수동형 시역전에 적용하여 통신성능 분석 을 수행하였다. 탐침 신호의 전달함수를 이용하는 기존의 수동형 시역전과 RBD 기법을 이용하여 각 데이터 프레임별로 추정된 전달함수를 이용한 수동 형 시역전의 통신성능을 비교함으로써 제안한 기법 의 성능을 검증한다.
본 논문의 구성은 다음과 같다. II장에서는 수동형 시역전 및 RBD 기법을 이용한 수동형 시역전 개념 을 검토하고, III장에서는 해상실험 및 전송신호에 대하여 설명한다. IV장에서는 실제 해상데이터를 이 용하여 기존의 수동형 시역전과 RBD 기법을 이용한 수동형 시역전의 통신성능을 비교분석하며, 마지막 으로 V장에서는 본 논문의 결론을 맺는다.
II. 시역전 기술 및 응용
2.1 수동형 시역전
수동형 시역전은 양방향 전파과정을 통하여 시공 간적 정합 필터를 수행하는 능동형 시역전과 달리 단일 방향 전파과정만 수행한다. 개의 수신 배열 을 이용한 수동형 시역전의 구조는 Fig. 1과 같다. 해 양 도파관에서 음원으로부터 송신된 신호가 배열 수 신기로 전파된다고 가정할 때, 수신기 채널별 전달 함수는 주파수 영역에서 아래의 관계식 Eq.(1)으로 표현할 수 있다.[7,9,16]
(1)
여기서 와 는 각각 번째 수신기에 수신 된 탐침 신호와 송신된 탐침 신호의 스펙트럼이다.
는 음원의 위치 로부터 번째수신기 위 치 에서의 탐침 신호로부터 구해진 전달함수이다.
탐침 신호로부터 구해진 전달함수를 이용하여 구 하고자 하는 데이터 신호의 수동형 시역전 신호는 Eq.(2)와 같이 나타낼 수 있다.
. (2)
Eq.(2)의 는 수신된 데이터 신호의 스펙트럼 이며, 는 수동형 시역전을 통해 재집속된 데이터 신호의 스펙트럼이다. 이때 는 공액복소수이다.
2.2 RBD 기법을 이용한 수동형 시역전 블라인드 디컨볼루션 기법은 수신기 배열단에서
수신된 신호만을 이용하여 음원에서 전파된 송신 신 호의 파형 및 전달함수를 추정하는 방법이며, 본 연 구에서는 음선 기반 블라인드 디컨볼루션 기법을 이 용하였다.[12]
주파수 영역에서 번째 수신기에 수신되는 데이 터 신호 는 데이터 신호의 전달함수
와 송신된 데이터 신호 의 곱으로 Eq.(3)과 같이 표현할 수 있다.
(3)
여기서 송신 신호 와 전달함수 의 정
보는 알지 못한다고 가정하며, 수신된 신호 로 부터 전달함수를 추정하기 위해 우선적으로 수신된 신호의 정규화를 수행한다.
(4)
수신 신호의 정규화 결과는 Eq.(4)와 같이 나타낼 수 있으며, 송신 신호의 세기 항 이 수신 신호로부 터 제거되었음을 알 수 있다. 하지만 정규화된 수신 신호에는 여전히 송신 신호의 위상 이 남아 있 으므로 이를 제거하기 위한 위상 보정 인자 를 다음과 같이 도입한다.
arg
arg
(5)Eq.(5)를 통해 계산된 위상 보정 인자와 Eq.(4)의 정 규화된 수신 신호의 곱을 통해 추정된 전달함수
를 Eq.(6)과 같이 나타낼 수 있으며, 적절 한 가중치 벡터 를 계산함으로써 구할 수 있다.
arg . (6)
이때 가중치 벡터 를 계산하는 방법에는 모드[17]
또는 음선 정보를 이용하는 방법[12]이 있으며, 본 논 문에서는 Eq.(7)과 같이 음선 정보를 기반으로 가중 치 벡터를 계산하였다.
∝
sin
(7)
여기서 는 센서간의 간격, 는 배열 수신기가 위치 한 곳에서의 평균 음속, 그리고 은 th경로에 해 당하는 음선의 각도를 나타낸다. 최종적으로 추정된 전달함수 를 이용하여 수동형 시역전 신 호 는 Eq.(8)과 같이 나타낼 수 있다.
(8)
는 데이터 신호로부터 추정된 전달함수를 이 용하여 수동형 시역전을 통해 재집속된 데이터 신호 의 스펙트럼으로 해석할 수 있다.
요약하면, 본 논문에서 제시하는 RBD 기법을 이 용한 수동형 시역전은 전송 신호 패킷 구성 내에 포 함된 탐침 신호의 전달함수로 사용하는 기존의 수동 형 시역전 기술과 달리 각 데이터 신호로부터 모든 전달함수를 추정하고 이를 수동형 시역전 기술에 적 용하여 데이터 신호를 복원한다.
III. 해상실험
3.1 해상실험 환경
본 실험은 2010년 10월 동해시 인근 해역에서 수행 되었으며,[7,18] Fig. 2는 실험 구성, Fig. 3(a) 실험 해역 의 음속 구조, Fig. 3(b)는 수신기가 배치된 수심에서 의 음속 구조를 나타낸다. 송신기는 수평으로 무지
Fig. 2. The geometry of the sea-going experiment.
(a) (b)
Fig. 3. The sound speed profile in the experiment.
Fig. 4. Configuration of the transmitted signal packet.
Fig. 5. The received LFM signal at the VLA.
향성, 수직으로는 ±40°의 유효 빔 폭을 가지며 수심 60 m에 위치한다. 수신기는 수직 선 배열(Vertical Line Array, VLA)을 사용하였으며 수심 92.5 m ~ 107.5 m에 24개의 센서가 비 균등 간격으로 구성되고,[7] 수신기 의 채널당 수신 샘플링율은 65536 Hz이다. 송/수신기 사이의 거리는 약 470 m, 해역의 수심은 약 350 m이 며, 당시의 음속은 XBT(eXpendable Bathy Thermograph) 를 이용하여 측정을 수행하였다.
3.2 전송 신호 패킷 구성
전송 신호의 패킷 구조는 Fig. 4와 같으며, 채널 임 펄스 응답(Channel Impulse Response, CIR) 분석을 위 한 탐침 신호와 통신용 데이터 신호로 구성된다. 탐침 신호는 주파수 대역 4 ~ 8 kHz를 가지는 m-시퀀스 k4 (15 chips), m-시퀀스 k9(511 chips), LFM(Linear Frequency Modulation) 신호로 구성되며, 본 논문에서는 LFM 신 호를 사용하여 분석을 수행하였다. 통신용 데이터 신
호는 총 40프레임으로 구성되며, 각 프레임은 중심 주파수 6 kHz, 대역폭 4 kHz를 가지는 QPSK(Quadrature Phase Shift Keying)로 변조된 16개 프리앰블 심볼과 BPSK(Binary Phase Shift Keying)로 변조된 1632개 데 이터 심볼로 구성된다. 또한 데이터 신호는 인접 심 볼 간 간섭을 최소화하기 위하여 roll-off 인자가 0.25 인 RRC(Root-Raised Cosine) 필터를 각각 변조와 복조 과정에서 정합필터로 사용하였다. 무음 구간의 길이 는 50 ms, 한 데이터 프레임의 길이는 약 520 ms이다.
IV. 실험 결과
4.1 수동형 시역전
본 절에서는 BER(Bit Error Rate) 산출을 통해 수동 형 시역전 신호의 통신성능을 확인하고자 한다.
Fig. 5는 각 채널에 수신된 탐침 신호 중 LFM 신호 를 나타내며, Fig. 6은 송 · 수신 LFM 신호 간의 정합 필터를 통해 구해진 채널 임펄스 응답을 나타낸 것 이다. 총 24개의 채널 중 시스템 문제로 인해 1번 채 널은 분석에서 제외하였으며, 22번 채널은 수신 감 도가 약한 것을 확인할 수 있다.
LFM 신호로부터 구해진 전달함수를 이용하여 총
Fig. 6. Depth-stacked CIR from LFM signal.
(a) PTRM (b) PTRM + PLL Fig. 7. Constellation results of 2nd frame.
(a) PTRM (b) PTRM + PLL Fig. 8. Constellation results of 35th frame.
40프레임 데이터 신호의 수동형 시역전을 수행하였 으며, 최대 우도(Maximum Likelihood, ML) 함수 기반 의 위상고정루프(Phase Locked Loop, PLL)를 적용하 여 위상을 보정하였다.[3,7]
Fig. 7은 수동형 시역전을 통해 복원된 2번째 프레 임의 성상도로, Fig. 7(a)와 (b)는 각각 위상고정루프 적용 전후를 나타낸 것이다. 위상 보정 결과 BER이 0.6532에서 0으로 통신성능 향상을 확인할 수 있다.
Fig. 8은 수동형 시역전을 통해 복원된 35번째 프레 임의 성상도로, Fig. 8(a)와 (b)는 각각 위상고정루프 적용 전후를 나타낸 것이다. 위상 보정 결과 BER이
0.5025에서 0.4859로 통신성능 향상이 이루어지지 않는 것을 확인할 수 있다. 이러한 문제가 발생하는 이유는 2번째 프레임의 경우, 탐침 신호와 프레임 사 이의 시간 차가 작아 채널 시변동이 크게 발생하지 않으므로 수동형 시역전 신호의 통신성능이 우수하 다. 하지만 35번째 프레임의 경우, 탐침 신호와 프레 임 사이의 시간 차가 커져 채널 시변동 영향으로 수 동형 시역전 신호의 통신성능이 저하된다.
4.2 RBD 기법을 이용한 수동형 시역전 본 절에서는 BER 산출을 통해 RBD 기법을 이용한 수동형 시역전 신호의 통신성능을 확인하고자 한다.
RBD 기법을 이용한 수동형 시역전은 각 프레임별로 전달함수를 추정하고, 이를 이용하여 수동형 시역전 을 수행한다.
RBD 기법을 통해 각 프레임별 전달함수를 추정하 기 위해 각 채널에 수신되는 데이터 신호를 Eq.(4)와 같이 정규화 과정을 수행한다. 앞서 언급한 바와 같 이 정규화된 수신 신호는 여전히 송신 신호의 위상 을 포함하기 때문에 위상 보정 인자를 통해 송신 신 호의 위상 항을 제거한다. 위상 보정 인자에서의 가 중치 벡터 를 계산하기 위해 Eqs.(9)와 (10)을 이용 하여 해당 주파수 대역폭에 대해 빔형성을 수행한 후, 해당 주파수에 대해 비상관 합산 처리를 통해 빔출 력 각도를 계산한다.
sin (9)
. (10)
Fig. 9는 2번째 프레임으로부터 구해진 해당 주파 수 대역에 해당하는 빔출력을 나타내며, Fig. 10으로 부터 -9.5°에서 높은 에너지에 해당하는 빔 출력 값이 나타나는 것을 확인할 수 있다. 출력된 각도를 이용 하여 Eq.(7)로부터 가중치 벡터 를 계산할 수 있으 며, Eq.(6)에 대입하여 2번째 프레임에서 각각의 수 신기에 대한 전달함수 를 계산할 수 있다.
최종적으로 구해진 전달함수를 이용하여 Eq.(8)로부
Fig. 9. Beamformed output of 2nd frame from the VLA at frequency range of 4000-8000 Hz.
Fig. 10. Beamforming results incoherently summed over the frequency band of 2nd frame.
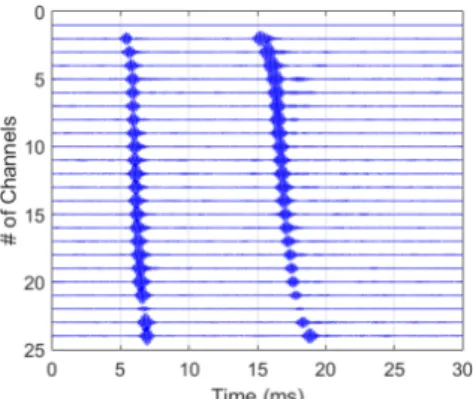
Fig. 11. Depth-stacked CIR from 2nd frame using RBD.
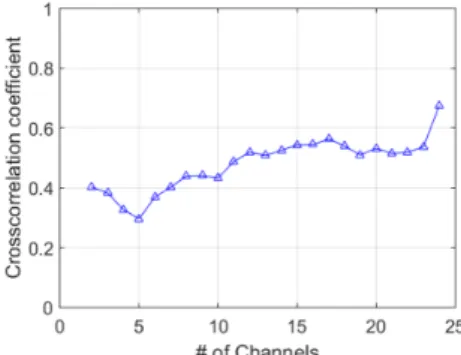
Fig. 12. The cross correlation coefficient between the estimated CIR of 2nd and 35th frame at each channel.
(a) PTRM + RBD (b) PTRM + RBD + PLL Fig. 13. Constellation results of 2nd frame using RBD.
(a) PTRM + RBD (b) PTRM + RBD + PLL Fig. 14. Constellation results of 35th frame using RBD.
터 RBD 기법을 이용한 수동형 시역전 신호를 복원 할 수 있다.
Fig. 11은 RBD 기법을 통해 추정된 2번째 프레임의 채널 임펄스 응답을 나타내며, 모든 프레임에 대하 여 동일한 과정을 수행하여 채널 임펄스 응답을 추 정한다.
Fig. 12는 RBD 기법을 통해 추정된 2번째 프레임의 채널 임펄스 응답과 35번째 프레임의 채널 임펄스 응답의 각 채널별 상호상관 계수의 최대치를 나타낸
다. 본 결과를 통해 2번째 프레임과 35번째 프레임 사 이에서 채널 시변동이 발생함을 확인할 수 있다.
Fig. 13은 추정된 전달함수를 이용하여 수동형 시 역전을 통해 복원된 2번째 프레임의 성상도로, Fig.
13(a)와 (b)는 각각 위상고정루프 적용 전후를 나타 낸 것이다. RBD 기법을 이용한 수동형 시역전에서 도 수신된 신호로부터 신호를 복원하기 때문에 기본 적으로 발생하는 위상 왜곡 문제는 해결되지 않으 며, 이를 해결하기 위한 위상고정루프를 동일한 방 법으로 적용한다 . 위상 보정 결과 BER이 0.2972에서 0으로 통신성능 향상을 확인할 수 있다.
Fig. 14는 동일한 과정을 통해 복원된 35번째 프레
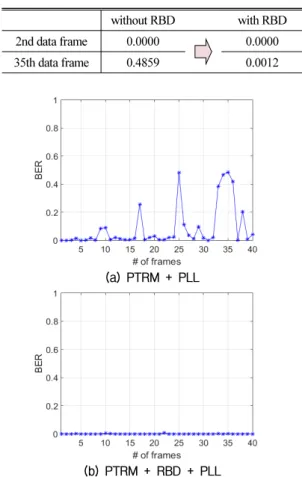
Table 1. BER comparison with/without RBD.
without RBD with RBD 2nd data frame 0.0000 0.0000 35th data frame 0.4859 0.0012
(a) PTRM + PLL
(b) PTRM + RBD + PLL
Fig. 15. BER comparison of PTRM and PTRM using RBD with PLL at each frame.
임의 성상도로, Fig. 14(a)와 (b)는 각각 위상고정루프 적용 전후를 나타낸 것이다. 위상 보정 결과 BER이 0.7525에서 0.0012으로 통신성능 향상을 확인할 수 있다.
Table 1은 기존의 수동형 시역전과 RBD 기법을 이 용한 수동형 시역전의 위상고정루프가 적용된 BER 성능 비교 결과를 나타낸다. 35번째 프레임에서 RBD 기법을 이용한 수동형 시역전의 BER 결과가 0.4589 에서 0.0012로 크게 향상되는 것을 확인할 수 있다.
Fig. 15는 총 40프레임에 대해 탐침 신호를 이용한 수동형 시역전과 RBD 기법을 이용한 수동형 시역전 의 프레임별 BER을 비교한 결과이다. Fig. 15(a)는 탐 침 신호의 전달함수를 이용한 수동형 시역전 결과를 나타낸 것으로, 채널 시변동이 반영되지 않아 각 프 레임별 BER이 0 ~ 0.5 사이에서 변화하는 것을 볼 수 있다. Fig. 15(b)는 RBD 기법을 통해 각 프레임별로
추정된 전달함수를 이용한 수동형 시역전 결과를 나 타낸 것으로, 채널 시변동이 반영되어 BER이 0 ~ 0.002 사이를 유지함으로써 성능이 개선된 것을 확 인할 수 있다.
V. 결 론
본 논문에서는 탐침 신호의 정합필터 결과를 이용 하는 기존의 수동형 시역전과 RBD 기법을 통해 각 데이터 프레임별로 추정된 전달함수를 이용하는 수 동형 시역전의 통신성능을 비교하는 연구를 수행하 였다. 전송 신호 패킷이 하나의 탐침 신호와 여러 개 의 데이터 프레임으로 구성되는 경우, 수신된 탐침 신호의 정합필터 결과는 각 데이터 프레임의 채널 시변동을 반영하지 못한다. 하지만 RBD 기법을 이 용하면 각 데이터 프레임의 전달함수를 추정할 수 있으며, 추정된 전달함수는 채널 시변동을 반영한 다. 실제 해상실험 데이터를 활용하여 통신성능을 비교한 결과, 탐침 신호의 전달함수를 이용하는 기 존의 수동형 시역전은 각 프레임별 BER이 0 ~ 0.5 사 이에서 변화하는 반면, RBD 기법을 통해 각 프레임 별 전달함수를 이용하는 수동형 시역전은 각 프레임 별 BER이 0 ~ 0.002를 유지함으로써 성능이 향상되 는 것을 보였다. 본 연구를 통해 RBD 기법을 기반으 로 전달함수 추정 및 통신신호 복원에 대한 활용 가 능성을 제시하였다.
감사의 글
본 논문은 2013년 해양수산부 재원으로 한국해양 과학기술진흥원의 지원을 받아 수행된 연구이며(해양 음향 측심 물성 모니터링기기 국산화 개발), 해상실 험은 국방과학연구소의 지원으로 수행되었다.
References
1. A. C. Singer, J. K. Nelson, and S. S. Kozat, “Signal processing for underwater acoustic communications,” in IEEE Communications Magazine, 90-96 (2009).
2. R. J. Urick, Principles of Underwater Sound, Third Edition (Mcgraw-Hill, New York, 1983), pp. 99-146.
3. J. G. Proakis, and M. Salehi, Digital Communications (McGraw-Hill, New York, 2008), pp. 160-688.
4. M. J. Eom, J. S. Park, Y. H. Ji, and J. S. Kim, “Mitigation of inter-symbol interference in underwater acoustic communica- tion using spatial filter” (in Korean), J. Acoust. Soc. Kr. 33, 48-53 (2014).
5. W. A. Kuperman, W. S. Hodgkiss, H. C. Song, T. Akal, C.
Ferla, and D. R. Jackson, “ Phase conjugation in the ocean:
Experimental demonstration of an acoustic time-reversal mirror,” J. Acoust. Soc. Am. 103, 25-40 (1998).
6. G. F. Edelmann, T. Akal, W. S. Hodgkiss, S. Kim, W. A.
Kuperman, and H. C. Song, “An initial demonstration of underwater acoustic communication using time reversal,”
IEEE J. Ocean. Eng. 27, 602-609 (2002).
7. M. J. Eom, J. S. Kim, J. H. Cho, H. Y. Kim, and I. Sung,
“Algorithm and experimental verification of underwater acoustic communication based on passive time-reversal mirror”
(in Korean), J. Acoust. Soc. Kr. 33, 392-399 (2014).
8. M. J. Eom, S. H. Oh, J. S. Kim, and S. M. Kim, “Algorithm and experimental verification of underwater acoustic communi- cation based on passive time-reversal mirror in multiuser environment” (in Korean), J. Acoust. Soc. Kr. 35, 167-174 (2016).
9. J. R. Yoon, M. K. Park, and Y. J. Ro, “Bit error parameters on passive phase conjugation underwater acoustic communi- cation” (in Korean), J. Acoust. Soc. Kr. 24, 454-461 (2005).
10. H. S. Kim, Y. S. Kwon, I. S. Lee, J. H. Chung, and S. I. Kim,
“Analysis of time reversal transmission performance for underwater communications” (in Korean), J. Acoust. Soc.
Kr. 28, 213-221 (2009).
11. K. C. Shin, Y. H. Byun, and J. S. Kim, “Theoretical develop- ment and experimental investigation of underwater acoustic communication for multiple receiving locations based on the adaptive time-reversal processing” (in Korean), J. Acoust.
Soc. Kr. 25, 239-245 (2006).
12. K. G. Sabra, H. C. Song and D. R. Dowling, “Ray-based blind deconvolution in ocean sound channels,” J. Acoust.
Soc. Am. 127, EL42-47 (2010).
13. S. H. Byun and K. G. Sabra, “Passive characterization of underwater sound channel using blind deconvolution of ship noise” (in Korean), 31th Underwater Acoustics Symposium of J. Acoust. Soc. Kr. 35 (2016).
14. S. H. Abadi, D. Rouseff, and D. R. Dowling, “Blind deconvolution for robust signal estimation and approximate source localization,” J. Acoust. Soc. Am. 131, 2599-2610 (2012).
15. G. H. Byun, S. H. Oh, and J. S. Kim, “Passive characteriza- tion of underwater sound channel using blind deconvolution of ship noise,” in Proc. the SAVEX15 Workshop of J.
Acoust. Soc. Kr. 13 (2016).
16. H. C. Song, W. S. Hodgkiss, W. A. Kuperman, W. J. Higley, K. Raghukumar, T. Akal, and M. Stevenson, “Spatial diversity
in passive time reversal communications,” J. Acoust. Soc.
Am. 120, 2067-2076 (2006).
17. K. G. Sabra and D. R. Dowling, “Blind deconvolution in ocean waveguides using artificial time reversal,” J. Acoust.
Soc. Am. 116, 262-271 (2004).
18. S. H. Oh, H. S. Kim, J. S. Kim, J. H. Cho, J. H. Chung, and H.
C. Song, “Performance analysis of underwater acoustic communication systems using underwater channel simulation tool” (in Korean), J. Acoust. Soc. Kr. 31, 373-383 (2012).
저자 약력
▸오 세 현 (Se Hyun Oh)
2010년 8월: 한국해양대학교 해양공학과 공학사
2012년 8월: 한국해양대학교 해양공학과 공학석사
2012년 8월 ~ 2014년 10월: 소나테크(주) 기술연구소 연구원
2014년 11월 ~ 2016년 1월: 한국해양과학 기술원 부설 선박해양플랜트연구소 연구원
2016년 3월 ~ 현재: 한국해양과학기술원- 한국해양대학교 해양과학기술전문대 학원 박사과정
▸변 기 훈 (Gi Hoon Byun)
2013년 2월: 한국해양대학교 해양공학과 공학사
2015년 2월: 한국해양대학교 해양공학과 공학석사
2015년 9월 ~ 현재: 한국해양과학기술원- 한국해양대학교 해양과학기술전문대 학원 박사과정
▸김 재 수 (J. S. Kim)
1981년: 서울대학교 조선공학과 공학사 1984년: 미국 University of Florida, 해양공학
공학석사
1989년: 미국 MIT, 해양공학, 수중음향 공학 박사
1990년 ~ 1991년: 국방과학연구소 선임 연구원
1999년 ~ 2001년: 미국 Scripps 해양연구소 Visiting Scientist
2009년 ~ 2010년: 미국 Scripps 해양연구소 Visiting Scientist
1991년 ~ 현재: 한국해양대학교 해양공학과 교수
![Fig. 1. A diagram of the passive time reversal mirror.한 신호 보상에 관한 연구가 진행되어 왔다.[1,4-6]시역전 기술은 1970년대 가역성의 원리에 근거하여 광학분야에서 처음 도입되었고 이후 수중에 적용되었으며,[5,6] 국내 · 외 수중음향통신 분야에서 자기 등화 기술로써 수동형 시역전 기술의 적용 연구 및 실험을 통한 검증을 수행하였다.[6-11]수동형 시역전의 경우 탐침 신호를 이용하여 수신 채널별 임펄](https://thumb-ap.123doks.com/thumbv2/123dokinfo/4744212.269611/2.892.479.768.972.1088/진행되어-가역성의-근거하여-광학분야에서-도입되었고-적용되었으며-수중음향통신-수행하였다.webp)