DOI http://dx.doi.org/10.7315/CADCAM.2012.312
<응용논문> ISSN 1226-0606
고감속비를 가지는 베어링일체형 구조의 2단 전위 감속기의 개발
황일규1†·최정수2·정문수2
1동양미래대학교 로봇자동화공학부, 2㈜티트론
Development of Dual Stage Profile Shifted Gear System with Bearing-Integrated Structure for High Reduction Ratio
Il-Kyu Hwang1†, Jung-Soo Choi2, and Moon-Soo Jung2
1School of Robot and Automation Engineering, Dongyang Mirae University,
2Ttron Co. Ltd., Seoul, Korea
Received 16 April 2012; received in revised form 17 July 2012; accepted 31 July 2012
ABSTRACT
Planetary gearing is a gear system consisting of one or more planet gears, revolving about a sun gear. While the planetary gear system has many advantages- for example, high power density, large reduction in a small volume, multiple kinematic combinations, pure torsional reactions, and coaxial shafting, it has not been widely used because of its high bearing loads, inaccessibil- ity, and design complexity. It is also necessary to shift several pairs of gear profiles at a same time. Therefore, designing profile shifted planetary gear system is a difficult and know-how dependent job. This study provides a practical solution to design a profile shifted gear system by the procedural design scheme, and proposes a bearing integrated structure of the dual stage profile shifted gear system with a robust output end. A dual stage profile shifted gear system with the bearing integrated structure is manufactured by the proposed design scheme in this study. This gear system is verified that it is good enough to commercialize, because it has high performance with high gear ratio and robust output end against axial and radial directional runouts in a small space.
Key words: Bearing integrated structure, Gear reduction ratio, Planetary gearing, Profile shifted gear, Robust output end supporter
1. 서 론
감속기는 엔진이나 모터 등으로부터 출력되는 고속회전을 입력으로 하여, 로봇, 자동화 및 정밀 제어기기 등에서 요구되는 안정도 및 정밀도를 구 현할 수 있도록 일정비율로 감속하여 출력시키는
장치로, 일반적으로 다수의 기어를 조합하여 기어 의 잇수 차이로 인한 감속을 도모하고 있으며, 유 성기어가 선기어의 주위를 회전하면서 감속이 이 루어지는 유성기어 시스템이 대표적인 예이다[1]. 이러한 유성기어에 관한 많은 연구가 있어 왔으
나[2-6], 유성기어를 이용한 감속기의 구조로는 보
다 큰 감속비를 도모하기 위해서 기어간의 연결이 다단으로 이루어져야 함에 따라 대소직경의 많은 기어와 다수의 축으로 인하여 부피와 무게가 커지
†Corresponding Author, [email protected]
©2012 Society of CAD/CAM Engineers
며, 베어링에 고하중이 걸리고, 설계가 복잡해지 는 등의 단점이 있었다[5,6]. 특히 직경차가 클수록 저단으로 큰 감속비를 구현할 수 있어서 기어간의 직경차를 크게 하는 것이 바람직하나, 직경이 작 은 기어와 큰 기어간의 맞물림시에는 정밀하게 가 공을 하여도 언더컷과 백래시가 생길 수 밖에 없 는 한계가 있었다.
이와 같은 한계를 극복하고자 제시된 기존 연구 로서, planetary speed reducer[7], compound epicyclic gear mechanism[8]을 포함한 다수가 제시되어 있으 며, 이러한 방법은, 구동축에 결합되는 선기어(Sun Gear)와, 선기어에 기어 결합되는 유성기어(Planetary Gear)와, 내주부가 유성기어에 결합되는 링형상의 고정링기어(Stationary Ring Gear)와, 고정링기어 와 기어잇수를 달리하여 유성기어에 기어 결합되 며 출력축이 연결되는 회전링기어(Movable Ring Gear)를 결합한 구조를 가진다. 이와 같은 구조에 따르면, 고감속비를 구현하기 위하여 고정링기어 와 회전링기어 중 적어도 어느 하나는 전위(Profile Shifted)치형을 가져야만 한다.
그러나 이러한 기어의 전위에 관한 연구들[9-11]에 있어서는, 기어들을 전위시켜 감속기로 제작 설계 하는 구체적인 설계 방법의 제시가 미흡하다 하겠 다. 즉, 일반적으로 전위 감속기에는 선(Sun) 기 어, 유성(Planetary) 기어, 고정링(Stationary Ring) 기어, 회전링(Movable Ring) 기어의 4가지 기어가 동시에 물려 있어 전위계수를 한번에 구하기가 쉽 지 않다. 또한 출력축이 연결되는 회전링기어를 정 위치에 회전가능 하도록 구속하기 위해서는, 베어 링이나 베어링 전동체를 회전링기어의 직선형 종 단면 형상을 가지는 외주부 또는 내주부 상에 선 택적으로 접속 설치하는 일반적인 회전축 지지구 조를 그대로 적용하고 있으며, 회전링기어에 대해 축방향으로 결합시킨 고정구를 일반적인 볼트체 결구조에 의해 고정시키고 있다. 그러므로 회전링 기어와 베어링, 이들과 접속되는 다른 구성요소들 의 가공 정밀도와 조립 정밀도에 의해 출력축 지 지구조의 견고성이 결정될 수 밖에 없는데, 이와 같은 출력축 지지구조에 의해서는, 고가의 정밀가 공기기나 정밀조립을 위한 별도의 장비를 구비하 지 않는 한, 산업상 안정적으로 이용 가능할 정도 로 정밀도를 구현하는 것이 실질적으로 매우 어려 운 일이었다.
이에 따라, 간단한 구조에 의해 우수한 감속비
를 구현할 수 있는 장점[5,6]에도 불구하고, 출력축 의 흔들림에 의해 소음이 발생되고, 출력축에 연 동되는 다른 기기들의 작동이 신뢰성있게 이루어 지지 못하여 생산효율 및 작업효율이 저하되는 문 제점으로 인해 전위감속기의 상용화가 제대로 이 루어지지 못하고 있는 실정이다.
따라서 본 연구에서는 서로 다른 잇수를 가지고 유성기어에 기어 접속되는 고정링 기어와 회전링 기어를 구비한 2단 전위 감속기를 제작 설계하는 실제적이고 체계적인 방법을 제시하고, 흔들림이 없이 동력을 전달하는 베어링 일체형(Bearing- integrated) 구조를 제안한다.
2. 전위감속기와 출력축 지지구조
2.1 기존 유성 기어 감속기의 구조
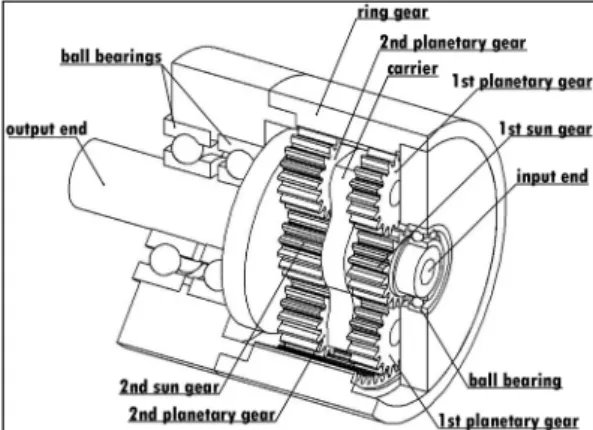
유성기어를 이용하는 유성기어 감속기는 일반 적으로 Fig. 1에 도시된 구조를 가지며, 이러한 유 성기어 감속기는 제1선기어, 제1유성기어, 링기 어, 캐리어, 제2선기어, 제2유성기어, 출력축으로 이루어진다.
제1선기어는 모터 등의 구동축에 연결되어 회 전되고, 제1유성기어는 제1선기어와 외측의 링기 어 사이에서 제1선기어에 연동회전하며 자전과 공전을 하게 되고, 캐리어는 제1유성기어의 회전 축에 결합되어 제1유성기어의 공전각속도로 회전 된다. 제2선기어는 캐리어의 회전중심에 축결합 되어 1차로 감속된 캐리어의 회전속도로 회전되 고, 제2유성기어는 제2선기어와 링기어 사이에서 제2선기어에 연동회전하며 자전과 공전을 하게
Fig. 1 Structure of conventional dual stage planetary gear system
되고, 출력축은 제2유성기어의 회전축에 결합되 어 제2유성기어의 공전각속도로 다시 감속되어 회전된다.
그러나, 이와 같은 구조의 유성기어 감속기는 높 은 감속비를 얻기 위해 선기어 잇수에 대한 링기 어의 잇수 비를 크게 형성시켜야 한다.
그러나 구동력을 직접적으로 전달받게 되는 선 기어의 강도를 안정되게 만들기 위해 실제로 그 비를 10:1 이상 구현하기 어렵다는 문제점이 있었 다. 그리고, 유성기어 감속기는 제1선기어와 제1 유성기어, 제2선기어와 제2유성기어에 의해 2단감 속되는 구조를 가지나, 100:1이상의 감속비를 얻 기 위해서는 3~4단의 구조를 가지는 유성감속기 를 사용하여야 하므로 체적과 중량이 증가되고 축 연결구조가 약화되어 그 적용이 한정될 수 밖에 없다는 다른 문제점이 있었다. 또한, 제1, 2유성기 어는 제1, 2선기어와 링기어의 기어치면으로 움직 임이 제한되어 축방향 이외의 모멘트에 취약한 구 조를 가지며, 각각의 기어 및 캐리어가 외팔보의 축 연결구조를 가짐에 따라 출력축에 작용하게 되 는 비틀림 하중에 의해 파손, 변형되기 쉽다는 다 른 문제점이 있었다.
유성기어 감속기의 감속비는 (1 + zR/zS)으로 높 은 감속비를 얻기 위해 링기어 잇수(zR)를 많게 하 고 선기어의 잇수(zS)를 적게 하여야 하는데 이로 인해 선기어의 강도가 약해져 감속기의 허용 출력 이 줄어들게 된다. 또한 이러한 감속기의 다단구 조로 인해 부품수가 증가하여 부피가 커지고 중량 이 늘어나게 된다.
따라서 유성기어 감속기의 구조상, 여러 기어들 이 맞물려야 하고, 같은 모듈에서 중심거리가 다 르므로 이의 조정을 위하여 전위 기어를 사용하여 야 한다.
2.2 전위감속기의 구조
일반적으로 전위기어(Profile Shifted Gear)는 표 준 피치원에서 반경방향으로 공구를 이송하여 가 공한 기어로서, 다음의 3가지 목적을 가진다. 첫 째, 언더컷(undercut)의 방지이다. 인볼루트 곡선 이 기초원의 안쪽에 존재하지 않아서 기어의 이 모양이 기초원의 내부까지 파고 들어가게 된다.
즉, 기어의 잇수가 적은 경우에는 이가 맞물릴 때 인볼루트 곡선의 일부를 깎아먹는 현상이 생기고 이러한 언더컷을 방지하기 위해 전위를 하게 된
다. 둘째, 전위를 하게 되면 기어의 이 두께가 넓 어지게 되고, 기어 굽힘 강도가 증가하게 된다. 셋 째, 중심간 거리조정이 필요할 때 전위를 하게 된 다. 즉, 기어의 잇수와 비틀림각만으로는 중심거 리 조정이 어려우므로 전위를 통하여 이 문제를 해결하고자 할 때 사용된다.
유성기어시스템에서는 선기어와 유성기어의 잇 수는 고정되어 일체로 되어 있으나 고정링기어와 회전링기어는 잇수가 다르면서 유성기어와 치합 하여야 한다. 이런 구조로 인하여 최소한 고정링 기어 혹은 회전링기어의 치형이 전위되거나 모든 기어들이 전위가 되어야 한다. 즉, 위의 Fig. 2에서 보는 바와 같이 전위가 되지 않으면 선기어와 유 성기어, 유성기어와 링기어들이 서로 떠있거나 부 딪히게 된다.
2.3 전위감속기의 견고한 출력축 지지구조 이러한 전위감속기는 몇가지 문제점을 가지고 있다. 우선, 2단 이상의 기어들이 맞물려 동시에 전위해야 할 기어열들이 많아지게 되면 최적값을 가지는 각 기어들의 전위계수 값을 구하기가 어렵 게 된다. 또한 출력측 회전링기어의 지지구조가 불 안정하게 된다.
Fig. 3에 나타난 바와 같이, 전위감속기는 선기 어, 유성기어와 캐리어, 고정링기어, 회전링기어, 베어링 블록의 순서로 조립되므로, 조립점에서의 치수에 변화가 있게 된다. 즉, 설계된 전위기어시 스템의 조립을 위한 조립점들에 있어서 각 조립점 마다 각 부품들의 치수에 공차가 있으므로 각 조 립점의 정확한 위치(높이)가 달라지게 되고 회전 Fig. 2 Dual stage planetary gear system without profile
shifted gears
링기어의 지지구조가 불안정하게 된다. 이는 조립 후 흔들림 또는 부하가 발생하는 원인이 된다.
이러한 문제의 해결을 위해 본 연구에서는 선기 어, 유성기어, 고정링기어, 회전링기어, 유성기어 캐리어로 구성되며, 서로 다른 잇수를 가진 링기 어 또는 선기어를 이용해 회전속도 차이를 최소화 하여 높은 감속비를 얻을 수 있는 방식의 2단 전 위 감속기를 제안한다.
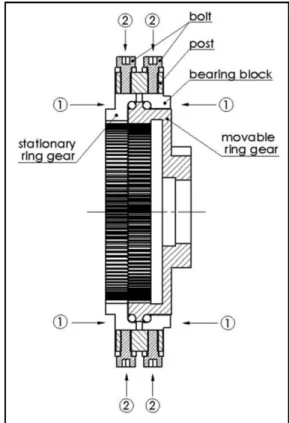
특히, Fig. 4와 Fig. 5에 나타난 바와 같이 수평 형 출력축 지지구조를 가지는 베어링과 일체화된 전위감속기의 구조를 제안한다. 이 구조에서는 고 정링 기어, 2열 볼 베어링, 회전링기어, 그리고 베 어링블록이 순차적으로 일체화되어 있다.
Fig. 4에 나타난 바와 같이 이러한 구조를 적층 조립할 때 수평으로 배치된 나사로 조인다. 즉, 축 방향(Axial direction)이 아닌 반경방향(Radial direction)으로 조립하게 된다. Fig. 5에서와 같이
고정링기어, 볼, 회전링기어, 볼, 베어링블록의 순 으로 조립을 하게 된다.
또한 2열의 베어링 볼의 흔들림을 최소화하기 위하여 ①의 축방향에서 가압한다. 가압의 상태를 유지한 상태에서 지지기둥(Post)을 고정링기어와 회전링기어의 구멍에 동시에 걸쳐 끼운 후, 볼트 로 ②의 반경 방향에서 체결한다.
만약 ①의 축방향에서 지지기둥(Post) 대신 볼트 로 조립을 하게 되면 볼트 조립시의 토크에 따라 각각의 볼트부위의 밀착 정도가 달라질 수 있게 된다. 그러나 ②의 반경 방향에서 조립을 하면 볼 트 조립시의 토크와 관계없이 원주방향으로의 동 일한 밀착 상태의 유지가 가능하게 된다.
이 구조는 2개의 앵귤러 컨택트 볼 베어링(Angular Contact Ball Bearing)을 사용한 것과 같은 효과를 나타내게 되고, 각 조립점마다의 높이 차이에 의 한 간격(Gap)이 없게 된다. 따라서 출력축 지지구 조의 흔들림이 감소하게 되고, 출력단의 축방향과 반경방향 모두 모멘트(Moment)에 의한 하중과 흔 들림에 강하게 된다. 또한, 일반 볼베어링 사용시 Fig. 3 Assembly of proposed profile shifted gear system
Fig. 4 Assembly of horizontal type output end supporter of proposed profile shifted gear system
Fig. 5 Section view of horizontal type output end supporter of profile shifted gear system (①: Axial direction, ②: Radial direction).
와 비교하면, 그 구조상 베어링의 리테이너가 필 요없게 되고 베어링의 수를 최대로 넣을 수 있어 면압 강도가 증가하게 되고, 흔들림에 강한 견고 한 구조를 가지게 된다. 특히, 감속기의 전체적인 크기가 현격하게 줄어들게 됨으로써, 휴머노이드 로봇과 같이 좁은 공간에서 고출력 고효율이 필요 한 소형 감속기에 적합하다.
3. 전위감속기의 설계
3.1 제안된 전위감속기의 설계
2장에서 제안한 흔들림에 강하고 견고한 수평형 출력축 지지구조를 가지는 베어링과 일체화된 감 속기의 설계를 위해서는 각 치형의 전위가 필요하 게 된다. 즉, 선기어와 유성기어의 잇수는 고정되 어 일체로 되어있으나, 고정링기어와 회전링기어 는 잇수가 다르면서 유성기어와 함께 맞물려야 한 다. 이런 구조로 인하여 최소한 고정링기어 혹은 회전링기어의 치형이 전위되거나 모든 기어들이 전위가 되어야 한다.
실제로 본 연구에서 제안하고 있는 베어링 일체 형 2단 전위감속기의 경우에는 동시에 전위해야 할 기어의 쌍이 선기어와 유성기어(Sun + Planetary Gears), 유성기어와 고정링기어(Planetary + Stationary Ring Gears), 유성기어와 회전링기어(Planetary + Movable Ring Gears)의 3가지 쌍으로 선기어, 유 성기어, 고정링기어, 회전링기어의 4가지 기어가 동시에 물려 있어 전위계수를 동시에 구하기가 쉽 지 않다.
또한 기어 혹은 기어들의 치형에 전위를 주게 되면, 기어의 성능이 향상되거나 저하되는 여러 현 상이 발생한다. 양(+)의 전위가 심하면 기어의 이 끝이 뾰족해지고 (링기어인 경우는 반대), 링기어 의 경우에는 인벌루트간섭, 트리밍간섭, 우육간섭 등이 발생한다.
따라서 전위 감속기의 설계는 이론적인 내용뿐 만 아니라 설계자의 실제적인 경험과 노하우가 포 함되는 고도의 창작 작업이라 하겠다. 그러므로 본 연구에서는 이러한 전위 감속기를 제작하기 위한 실제적인 설계 절차를 제시하고, 제안된 절차에 따 라 설계 및 제작된 전위감속기를 검증한다. 제안 된 절차에 따라 설계된 전위감속기는, 고정링기어 와 회전링기어의 2단구조에 의해 100:1 이상의 감 속비를 무리없이 얻을 수 있을 정도로 우수한 감
속성능을 구현할 수 있다.
전체적인 설계절차를 살펴보면, 우선 각 기어들 의 전위 값에 범위를 주어 반복 계산(Iteration)을 하면서 인벌루트간섭, 트리밍간섭, 우육간섭등의 간섭을 가지는 경우의 수는 일차적으로 배제한 다. 이어서, 기어의 강도를 결정짓는 영역계수(ZH) 와 물림율계수(Zε)를 계산하여 성능이 나쁜 경우 의 수는 2차적으로 배제한다. 다음으로 외부 부하 토크에 의해 각 기어에 걸리는 하중을 고려하여 모든 기어 쌍의 강도가 비슷한 경우를 선택하여 어느 정도 최적화된 범위의 경우의 수를 산출하여 강도 계산을 실시한다.
상용 감속기의 제작을 위한 자세한 설계 절차는 다음 절에 나타나 있다.
3.2 전위감속기의 설계 및 절차
본 연구에서 제안하는 전위 감속기의 설계에서 는 동시에 전위해야 할 기어의 쌍이 선기어와 유 성기어, 유성기어와 고정링기어, 유성기어와 회전 링기어의 3가지 쌍이 되고, 기어 시스템의 초기 입 력 요소들은 압력각(α), 모듈(m), 그리고 기어의 잇수이다. 제안된 설계 절차가 종료되면 면압 강 도가 우수한 각 기어들의 전위계수가 결정되고, 이 전위 계수들에 따라 각 기어들의 피치원과 선기어 와 유성기어간의 중심거리, 그리고 전체 크기가 결 정되게 된다.
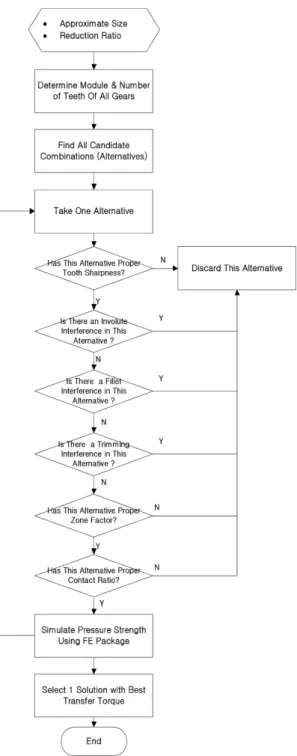
전체적인 설계 절차가 Fig. 6의 흐름도에 나타 나 있다.
우선 감속기의 대략적인 전체 크기와 필요한 감 속비(Reduction Ratio)가 주어지면, 선기어, 유성기 어, 고정링기어, 회전링기어의 잇수 (z1, z2, z3, z4) 와 모듈(m) 값을 결정한다.
다음에는 이끝의 형상인 이끝 뾰족함(Tooth Sharpness)의 한계를 고려한다. 이끝 뾰족함(Sa)은 식 (1)에 의해 계산되며[12], DIN에서는 0.2 m 이 상, ISO에서는 0.3 m 이상을 규정하고 있다.
(1)
Where, S is the tooth thickness at pitch circle, da
is the diameter of addendum, d0 is the pitch diameter, invα0 is the involute value of pressure angle, and invαa is the involute value of pressure angle at tip.
Sa da s d0
--- invα+ 0–invαa
⎝ ⎠
⎛ ⎞ 0.3m≥
=
식 (1)을 만족하는 조합들이 결정되면, 다음 단 계로 기어들간의 간섭(Interference) 체크를 해야 한다.
전위기어 시스템에서 발생하는 간섭에는 인벌 류트(Involute) 간섭, 우육(Fillet) 간섭, 그리고 트
리밍(Trimming) 간섭이 있다. 만약 간섭 체크를 하 지 않으면, 기어들이 원활히 맞물려 돌아가는 것 이 아니라, 내기어(고정 또는 회전링기어)의 이끝 과 외기어(선기어와 유성기어)의 이뿌리가 간섭되 어 약한 쪽의 기어 이(또는 맞물리는 양쪽 기어 모 두)가 손상되거나 원활한 회전이 이루어지지 않게 된다.
내기어(Internal Gear)의 작용선(Path of Contact) 이, 유성기어가 링기어와 접촉해서 회전할 때 유 성기어의 인벌루트 치형과 링기어의 이끝이 그리 는 트로코이드곡선(Trochoid Curve)이 서로 닿는 것을 인벌류터 간섭이라고 하며 반드시 방지하여 야 한다. 인벌류트 간섭은 아래의 식 (2)를 만족할 때 피할 수 있게 된다[12].
(2)
Where, z1 and z2 are the number of the teeth of external and internal gears respectively, αw is the working pressure angle and αa2 is the pressure angle at a tip of the internal gear tooth.
우육(Fillet) 간섭은 내기어의 우육부분에 피니언 의 이끝이 충돌하여 회전이 안될 때를 말한다. 즉, 링기어의 이뿌리원 부분 중 필렛(Fillet) 부분이 유 성기어의 이끝 부분과 닿는 부분이 없도록 간섭 체크를 해야 한다. 우육 간섭의 점검은 아래의 식 (3)를 만족하면 된다[12].
(3)
Where, αa1 is the pressure angle at a tip of the external gear tooth, αac is the pressure angle at a tip of the pinion cutter, is the working pressure angle during machining, and zc the number of the teeth of pinion cutter.
피니언 커터로 절삭이 끝났을 때 반경방향으로 커터를 되돌리려고 하면 커터의 날 끝이 내기어의 이 끝부분을 칠 때가 있다. 이러한 간섭을 트리밍 (Trimming) 간섭이라고 한다[13]. 트리밍 간섭 체크 를 반드시 해야 하는 이유는 내기어에 피니언을 치합할 때 반경 방향에서는 조립과 분해가 불가능 하기 때문이다[12]. 트리밍 간섭 체크를 위한 관계
z1
z2
---- 1 tanαa2 tanαw ---
≥ –
z1(tanαw–tanαa2) z+ 2(tanαw′ tanα– w) z+ c(tanαac–tanαw′) 0≥
αw′
Fig. 6 Flowchart of proposed design procedure for profile shifted gear system
가 다음의 식 (4)~(6)에 나타나 있다.
(4)
(5)
(6)
Where, αa1 is the pressure angle at a tip of the external gear tooth, αa2 is the pressure angle at a tip of the internal gear tooth, and invαw is the involute function of αw.
이들 세가지 종류들간의 간섭체크는 그 순서를 서로 바꾸어도 같은 결과가 나온다. 다만, 인벌류 트 간섭을 최우선적으로 할 경우 최적화를 위한 계 산시간이 가장 단축되게 된다. 그 이유는 인벌류트 간섭 체크가 우육 또는 트리밍 간섭보다 체크범위 가 넓어, 1차로 인벌류트 간섭에서 통과될 수 없는 다수의 후보군을 제외시켜, 소수의 후보군으로 우 육과 트리밍 간섭체크를 하게 되기 때문이다.
다음 단계로 고려해야 할 사항은 영역계수와 물 림율계수이다. 영역계수(Zone Factor, ZH)는 피치 점에서의 치면의 곡률을 고려하고 기준 원통상의 접선력을 피치 원통상의 법선력으로 바꾸어 준 다. 영역계수는 기존 원통상의 비틀림각이 주어질 때 전위계수와 기어 잇수로 이루어진 함수에 대한 그래프[14]로 구해진다. 이 계수는 기어의 강도에 영 향을 주는 요소이다.
기어에 있어서 접촉점의 궤적을 양 기어의 치선 원으로 서로 구획지은 범위인 물림길이를 이웃 이 까지의 거리로 나눈 값을 물림율(Contact Ratio) 이 라고 한다. 물림율계수(Contact Ratio Factor, Zε)는 정면 물림율과 중첩물림율이 기어의 치면 하중 용 량에 미치는 영향을 고려한 것이다. 물림율계수 (Zε)는 다음의 식 (7)로 계산할 수 있다[14].
(7)
Where, εα is the transverse contact ratio.
마지막 단계로서 주어진 전위계수를 이용하여 감속기의 강도와 전달 허용 토크를 계산한다.
동력 전달용 기어의 설계에 있어서 가장 중요한 것은 이뿌리에 생기는 응력에 의한 피로파괴와 관 련된 굽힘강도(Bending Strength)와 기어의 이 접 촉면에 생기는 응력에 의해 기어의 이가 손상되는 것과 관련된 면압강도(Surface Durability)의 계산 이다.
일반적으로 유성기어는 단이 증가할수록 토크 가 증폭된다. 특히, 선기어와 유성 기어의 면압강 도에서 감속기의 정격 토크가 결정된다. 굽힘강도 는 기어의 이뿌리가 균열이나 휨이 없이 견딜수 있는 최대 강도를 의미하는데, 이 두께에 많은 영 향을 받으므로 전위계수와 밀접한 관련을 가지고 있다. 면압강도의 계산은 피치점이나 한쌍의 이물 림의 안쪽점(Inner Point of Single Pair Tooth)에서 의 접촉 응력을 근거로 계산한다[14]. 이들 강도의 계 산을 위한 식으로서 수십년 전부터 알려진 루위스 (W. Lewis), AGMA(American Gear Manufacturers Association), ISO 등의 여러가지 공식들이 있다.
그러나 이들 계산식들이 복잡하고, 기어의 형상, 재질, 열처리 방법등에 따라 각 식에 사용되는 계 수나 그 결과 값이 달라져 특별하게 어느 한 공식 을 적용하기가 쉽지 않다.
따라서 근래에는 이와 같은 기어 강도의 계산을 위한 해석 소프트웨어들이 개발되고 있고, 본 연 구에서는 이 단계의 설계를 위해 보다 실증적인 전용 해석 소프트웨어를 사용한다. 즉, 주어진 전 위계수들을 사용하여 각 기어 쌍들의 면압강도와 전달허용토크를 계산하여 가장 좋은 성능을 가지 는 전위계수들을 선택한다.
3.3 실제 전위감속기의 설계 및 제작
앞에서 살펴본 전위기어의 설계절차에 따라 2장 에서 제안한 2단 전위 감속기를 다음과 같은 과정 을 거쳐 설계를 진행하였다.
우선 초기 설계 조건으로 감속기의 전체 크기가 90 mm× 90 mm로 하였고, 감속비는 200:1이상으 로 가정하였다. 따라서 선기어의 잇수를 z1, 유성 기어의 잇수를 z2, 고정링기어의 잇수를 z3로 하면 회전링기어의 잇수 z4와 감속비는 다음과 같다.
■z4 = z3 + n, n = 3: 유성기어의 개수
■감속비 = (1 + z3/ z1) * (z4/(z4 − z3)) θ1 invαa1 invαw z1
z2
----(θ2+invαa2–invαw)
≥ – +
θ1 sin–1 1–(cosαa1/cosαa2)2 1 z1
z2
⎝ ⎠----
⎛ ⎞2 –
---
=
θ2 sin–1 (cosαa1/cosαa2)2–1 z1
z2
⎝ ⎠----
⎛ ⎞2–1 ---
=
Zε 4–εα ---3
=
이어서, 전체 크기가 90 mm 이내이므로,
■회전링기어의 외경
=기어의 이뿌리원 직경 + 림두께 + 기타 < 90 이어야 한다. 여기서,
■m: 모듈(Module)
■회전링기어의 이뿌리원(Root Circle)직경
=기준피치원직경 + 2 * Dedendum + 2 * 전위량
■기준피치원(Reference Pitch Circle) 직경
= m * z4
■Dedendum = 1.25 * m
■전위량(Profile Shift) = x * m
■림두께(t, Rim Thickness) ≥2.25 * 1.2 * m (AGMA 기준[15])
■기타 = 2 * (볼 안착용 홈 + 최소 살두께) 다음으로, 우선 x4= 0으로 가정하면, z4= 115개, m = 0.6인 경우, 전체 크기를 확인한다.
■회전링기어의 외경
= m * z4+ 2 * 1.25 * m +2 * 2.25 * 1.2 * m +기타
= 83.74 (≤90 mm)
z1= 26개, z2= 44개인 경우의 감속비는
■감속비 = (1 + z3/ z1) * (z4/ (z4− z3))
= 203.46 (≒200)
그러므로, 주어진 조건을 만족하는 각 기어의 잇 수와 모듈값이 z1 = 26, z2 = 44, z3 = 112, z4= 115, Module(m) = 0.6으로 결정되었다.
이 조건을 만족하는 전위계수들의 후보군을 x3
와 x4에 대해서 임의로 범위를 −1.5~1.5(증분
∆ = 0.1)로 결정하면, 전체 900건의 후보군이 준 비된다.
먼저 각 후보군에 대해서 이끝뾰족함을 고려하 면, 40건이 후보로 선택되고 나머지 후보군들은 버려진다.
다음으로 인벌류트와 우육, 트리밍 간섭 조건을 고려하면 38건으로 추려진다.
영역계수와 물림률 계수를 고려하면 26가지의 후보군이 선택된다.
선택된 26건의 후보군을 대상으로 주어진 전위 계수들을 이용하여 기어 강도와 전달 토크를 계산 한다. 본 연구에서는 상용 기어 해석용 소프트웨
어(KISSsoft[16])를 사용하여 이 단계를 수행하였 다. 26건 중 고정링기어와 회전링기어의 강도가 함께 가장 높은 경우의 전위계수를 주어진 설계조 건에 적합한 전위계수로 결정하였다. 그러나 이때 각 기어들의 전위계수 값이 −1 이하 또는 +1 이상 인 것은 제외시켰다.
이는 설계자의 경험적 판단기준으로서 이끝이 너무 뾰족해지거나 이뿌리가 가늘어서 서로 맞물 릴 때 기어 이가 손상될 우려가 있어서이다.
또한 처음부터 x3와 x4의 범위를 −1~+1로 결정 하지 않은 이유는 −1부근과 +1부근의 기어형상이 아주 불만족스러운 것은 아니므로, 일단은 x3와 x4
의 값을 최대한 넓은 범위(DIN규격을 따르는 KISSsoft에서는 x는 −1.2~+1.5 임.)로 결정한 것이 다. 최종적으로는 허용전달토크가 가장 좋은 경우 를 전위값으로 결정하였다.
Fig. 7에 설계 완료된 2단 전위기어가 나타나 있 다. 여기서 선기어와 유성기어의 중심간 거리는 21.05 mm이며, 확정된 각 전위계수는 x1= 0.44, x2= −0.35, x3= 0.85, x4= −0.75이다. 그림에 나타 난 바와 같이 선기어와 유성기어, 유성기어와 링 기어들의 맞물림이 일치하고 있다.
4. 제작 및 검증
4.1 전위감속기의 제작
앞장에서 설계된 베어링 일체형 2단 전위기어시 스템을 실제로 제작하였다. 치차가 안쪽에 있으므 로 내치차는 호브로 가공이 힘들고, 셰이핑 또는 브로우칭 가공을 주로 한다. 셰이퍼 가공을 하려 Fig. 7 Bearing integrated dual stage profile shifted gear
system
면 피니언 커터의 형상 설계를 별도로 해야 한다.
즉, 내기어의 모듈, 잇수, 형상이 결정되면 셰이퍼 가공용 피니언 커터(Pinion Cutter)의 바디 형상이 결정된다. 또한 내기어의 재질 및 정밀도에 따라 피니언 커터의 재질 및 후처리가 결정된다.
Fig. 8과 Fig. 9에 제작된 전위감속기의 부품들 과 조립 후 완성된 모습이 나타나 있다.
본 연구에서는 감속기의 기어 재질은 SCM440 을 사용하였으며, 선기어와 유성기어에는 570oC 전후의 처리온도에서 암모니아 가스를 주성분으 로 한 혼합 가스를 첨가하여 가공재료의 표면에 탄화물과 질화물의 화합물층을 형성시키고 그 안 쪽에 확산층을 생성시키는 가스연질화 방법을 사 용한 열처리를 시행하였다.
Fig. 9에는 베어링 일체형 2단 전위감속기의 내 부 형태가 확대도와 함께 나타나 있다. 링기어의 원주를 따라 볼베어링이 삽입되어 있는 것을 알 수 있다.
4.2 전위감속기의 성능 분석 및 검증
감속기의 성능을 파악하기 위해서는 감속비, 출 력토크, 흔들림 량, 백래시등을 측정하여야 한다.
이들 중 감속비는 이미 계산에 의하여 결정되었 다. 본 연구에서는 원주 방향과 축방향의 흔들림 량과 백래시를 직접 측정하였다.
또한 출력 토크의 경우에는 설계단계에서 활용 하였던 전용 해석 프로그램을 이용하여 검증하였다.
4.2.1 흔들림량 측정
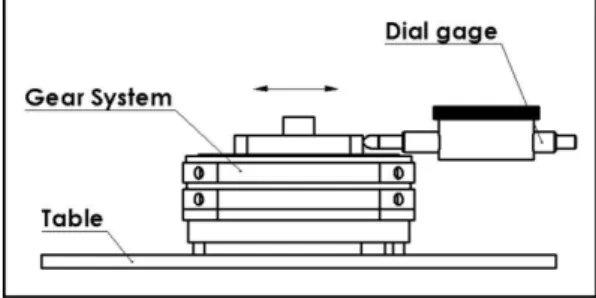
감속기 몸체가 테이블에 고정되어 있을 때, Fig.
10의 화살표 방향처럼 출력 링기어를 잡고, 좌우 어느 한쪽으로 밀착시킨 상태에서 반대방향으로 밀착시켰을 때 다이얼게이지(dial gage)에서 확인 된 움직인 양을 원주방향의 흔들림(Runout) 량으 로 본다.
이 때 출력 링기어의 이는 이론적으로 둥근 원 주방향으로 형성되어 있어야 하지만, 실제로는 동 심이 아닐 수도 있고, 원이 아닌 타원일 수도 있 으며, 치형이 찌그러져 있을 수도 있으므로, 출력 링기어를 원주 방향으로 돌아가면서(360o/5회 = 72o) 여러 번 흔들림 량을 측정하여 평균값을 구하였 다. Table 1에 그 결과값이 나타나 있다.
Fig. 8 (a) Parts and (b) Assembly of proposed profile shifted gear system
Fig. 9 Internal view of proposed profile shifted gear system
Table 1 Results of runout estimation at output end in the radial direction
1회 2회 3회 4회 5회 평균 Runout
(mm) 0.015 0.021 0.020 0.018 0.018 0.018 Fig. 10 Runout estimation of the gear system at output
end in the radial direction
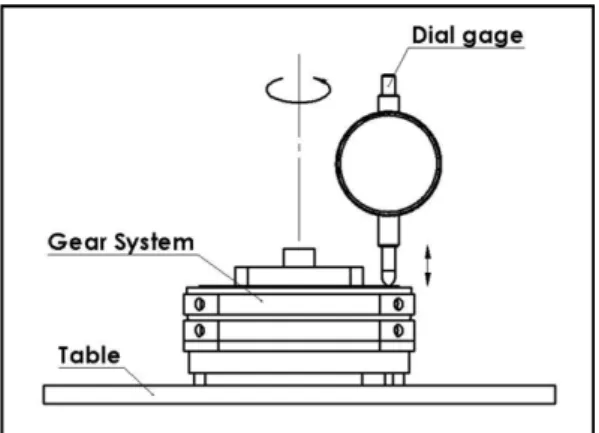
감속기 몸체가 테이블에 고정되어 있을 때, 다 이얼게이지가 측정하는 근방을 누른 상태와 180o 반대쪽을 누른 상태의 높이 차이를 다이얼게이지 의 눈금으로 확인하여 이를 축방향 흔들림량으로 본다(Fig. 11).
이 때도 볼의 외경공차, 볼과 접촉되는 홈(고정 링기어의 홈, 출력 링기어의 양쪽 홈, 베어링블록 의 홈)의 가공오차의 발생 우려를 감안하여 출력 링기어의 원주방향으로 돌아가면서 5회 측정을 하 여 흔들림량의 평균값을 구한다.
Table 2에 그 결과값이 나타나 있다.
4.2.2 백래시(Backlash)의 측정
테이블에 감속기가 고정되고 선기어도 회전하 지 못하도록 선기어축을 고정한 상태에서, 출력 링 기어와 결합된 링크를 아래로 내려 출력 링기어의 이와 유성기어의 이를 밀착시킨 상태에서 위로(반
대방향) 올려 다시 이를 밀착시켰을 때의 다이얼 게이지 상의 변화된 수치를 읽는다. 실제로는 호 의 형태로 움직이나 링크길이가 500 mm로 충분 히 길어서 움직인 호와 호의 양끝 점을 이은 직선 의 거리 차를 무시하여 직선길이로 가정하고 백래 시각도를 구한다.
즉, 백래시(Backlash)(o)=
4.2.3 출력토크의 측정
출력토크 측정은 전용 해석 프로그램[16]을 이용 하여 검증하였다. 이 결과에 의하면 선기어는 18.1 Nm, 고정링기어는 78.1 Nm, 회전링기어는 90.1 Nm, 유성기어는 96.244 Nm의 출력 토크를 가 진다. 즉, 선기어의 토크가 가장 낮으며, 출력단에 힘을 가했을 때 선기어가 최초로 손상 또는 절단 됨을 의미한다.
5. 결 론
일반적으로 유성기어는 단이 증가할수록 토크 가 증폭된다. 특히, 선기어와 유성 기어의 면압강 도에 의해서 감속기의 정격 토크가 결정된다. 또 한 감속기의 구조상, 여러 기어들이 맞물려야 하 고, 같은 모듈에서 중심거리가 다르므로, 이의 조 정을 위하여 전위 기어를 사용해야 한다. 그러나 2단 전위감속기의 경우에는 동시에 전위해야 할 기어의 쌍이 여러 가지가 되고, 선기어, 유성기 어, 고정링기어, 회전링기어의 4가지 기어가 동시 에 물려 있어 전위계수를 동시에 구하기가 쉽지 않다. 또한 설계된 전위기어시스템의 조립을 위한 조립점들에 있어서 각 조립점 마다 각 부품들의 치수에 공차가 있으므로, 조립 후 흔들림 또는 부 하가 발생하는 원인이 된다.
높은 감속비를 얻기 위해 링기어의 잇수는 많게 하고 선기어의 잇수는 적게 하여야 하는데 이로 인해 선기어의 강도가 약해져 감속기의 허용 토크
tan–1 1.44 ---500
⎝ ⎠
⎛ ⎞ 0.165= o Fig. 11 Runout estimation of the gear system at output
end in the axial direction
Table 2 Results of runout estimation at output end in the axial direction
1회 2회 3회 4회 5회 평균 Runout
(mm) 0.010 0.012 0.015 0.012 0.016 0.013
Fig. 12 Estimation of backlash of gear system
Table 3 Results of backlash at 500 mm link length 1회 2회 3회 4회 5회 평균 Runout
(mm) 1.5 1.4 1.4 1.5 1.4 1.44 Backlash
(o) 0.171 0.160 0.160 0.171 0.016 0.065
가 줄어들게 된다. 특히, 감속기의 다단구조로 인 해 부품수가 증가하여 부피가 커지고 중량이 늘어 나게 된다.
이러한 문제점들의 해결을 위해 본 연구에서는 선기어, 유성기어, 고정링기어, 회전링기어로 구성 되며, 서로 다른 잇수를 가진 링기어 또는 선기어 를 이용해 회전속도 차이를 최소화하여 높은 감속 비를 얻을 수 있는 방식의 2단 전위 감속기를 제 안하였다. 특히, 설계자의 경험과 노하우에 크게 의존하는 2단 전위 감속기를 설계하는 체계적인 방법을 제시하고, 흔들림이 없이 동력을 전달하는 베어링 일체형(Bearing-integrated) 구조를 제안하 였다. 이 구조는 2개의 앵귤러 컨택트 볼 베어링 을 사용한 것과 같은 효과를 나타내게 되고, 출력 축 지지구조의 흔들림이 감소하게 되어, 출력단의 축방향과 반경방향 모두 모멘트에 의한 하중과 흔 들림에 강하게 된다. 또한, 일반 볼베어링과 대비 하여, 베어링의 리테이너가 필요없게 되고, 면압 강도가 증가하여 흔들림에 강한 견고한 구조를 가 지게 된다. 특히, 감속기의 전체적인 크기가 현격 하게 줄어들게 됨으로써, 휴머로이드 로봇과 같이 좁은 공간에서 고출력 고효율이 필요한 소형 감속 기에 적합하다.
또한 제안된 절차에 따라 설계 제작된 전위감속 기는, 고정링기어와 회전링기어의 2단구조에 의해 100:1 이상의 감속비를 무리없이 얻을 수 있을 정 도로 우수한 감속성능을 구현하였다. 특히, 작은 공간에서도 높은 감속비를 가진 고출력의 소형 상 용 감속기로의 성능을 가지고 있음을 검증하였다.
감사의 글
본 연구는 2009년도 동양미래대학교 학술연구 지원사업의 지원을 받아 연구되었음을 밝히며, 이 에 감사드립니다.
참고문헌
1. Planetary Gearing from Wikipedia, http://en.wiki- pedia.org/wiki/Epicyclic_gearing
2. Cabral, E., Nagahashi, F., Marcos Hunold, C., Design, Construction and Test of a Two-Stage Planetary Traction Speed Reducer, ABCM Sym- posium Series in Mechatronics, 1, pp. 444-453.
3. Song, Y., Zhang, J., Zhang. C., 2007, Researches on Key Technologies in Optimization Design Of Ring-Plate Gear Reducer, 12th IFToMM World Congress, Besançon (France), June 18-21.
4. Taldenko, Y.K., 1994, Mathematical Model of Planetary Roller-Tooth Reduction Gears, Chem- ical and Petroleum Engineering, 30(4), pp. 145- 153.
5. Lynwander, P., 1983, Gear Drive Systems: Design and Application. Marcel Dekker, New York.
6. Smith, J.D., 1983, Gears and Their Vibration:
A Basic Approach to Understanding Gear Noise.
Marcel Dekker, New York and MacMillan, Lon- don.
7. Heller, W.H., Planetary Speed Reducer, UMC Industries, Inc., US Patent No. 4,429,594.
8. Duer, M.J., Compound Epicyclic Gear Mecha- nism, General Motors Corporation, US Patent No. 3,081,648.
9. Baira, B.-W., Tsayb, C.-B., 2001, Effects of Profile Shifted Factor and Pressure Angle on the ZK-type Dual-lead Worm Gear Drives, Jour- nal of Materials Processing Technology, 112(1), pp. 29-36.
10. Tsai, S.-J., Wu, S.-H., 2007, Geometrical Design of Conical Gear Drives with Profile-shifted Transmission, 12th IFToMM World Congress, Besançon, France, June 18-21.
11. Nadano, H., Terauchi, Y., Nohara, M., 1982, On The Effect of the Tooth Profile Modification on the Dynamic Load and the Sound Level of the Spur Gear, Bulletin of JSME, 25(207), pp. 1474- 1481.
12. Kim, J.H., 2007, Gear and Hobbing Operation, Gijeon Publishing Co., Seoul, pp. 60-99.
13. Gear Technical Reference, http://www.khkgears.
co.jp, pp. 19-20.
14. KS B ISO 6336-2, Calculation of Load Capacity of Spur and Helical Gears – Part 2: Calculation of Surface Durability, pp. 2-15.
15. AGMA American Gear Manufacturers Associ- ation, http://www.agma.org/
16. KISSSOFT User Manual Release 03/2011, http://
www.kisssoft.ch/english/home/index.php
황 일 규
1988년 서울대학교 조선공학과 학사 1990년 한국과학기술원 산업공학
과 석사
1990년~1994년 삼성종합기술원 주임연구원
2002년 University of Wisconsin- Milwaukee 기계공학과 박사 1994년~현재 동양미래대학교 자동
화시스템과 교수
관심분야: CAD/CAM, Computa- tional Geometry, Automation Systems
정 문 수
1998년 동국대학교 기계공학과 학사 2000년~2005년 ㈜피앤에스미캐닉
스 연구부 2007년~현재 ㈜티트론 관심분야: Robotics, CAD/CAM
최 정 수
1988년 서울대학교 조선공학과 학사 1990년~1994년 ㈜신도리코 중앙
연구소
1994년~1998년 ㈜아람전자 개발부 1998년~2000년 ㈜인터메드 연구부 2000년~2002년 베스텍
2002년~2006년 ㈜피앤에스미캐닉 스 연구부
2007년~현재 ㈜티트론 대표 관심분야: Mechanical Design,
CAD, Robotics