1. 서 론
1)최근 기후변화 등에 따른 물리적 환경(체류시간 등) 이 급변하여 하천의 녹조현상 심각성이 사회 문제로 대두되고 있다. 특히, 다양한 조류 중에서 남조류는 잠재적인 독성을 가지고 있기 때문에 이에 대한 근본 적인 저감 대책이 필요하며 경제적, 사회적 문제를 야 기 시킨다(Teixeira et al., 2006, Figueiredo et al., 2004).
현재, 정부에서는 전국 28개 하천·호소를 대상으로 조
Received 4 April 2017, revised 4 May 2017, accepted 2 June 2017
*
Corresponding author: Tae-Mun, Hwang(Email: [email protected])
류경보제를 운영하고 있는데, 녹조 문제는 심화되고 있으나, 수질 모니터링은 보 1개의 대표지점에서 측정 하고 있어, 측정범위가 넓어지거나, 대규모 하천에 인 접한 소하천의 접합지점이 많아서 오염물질의 유입이 추가 유입하는 경우에는 샘플링 지점을 추가하여 감 시하는 등 하천 수질감시의 효율성이 떨어질 수 있다.
따라서 하천 전체에 대한 공간적 분포를 파악하기는 어렵다. 조류의 공간적 분포를 파악하기 위한 모니터 링에 관한 연구가 국내에서도 진행 중에 있다. 최근에 는 이러한 한계를 보완하고자, 조류의 감시를 위하여 위성영상을 이용한 원격탐사 기법에 대한 연구가 진
하천녹조지도 작성을 위한 무인항공기 활용 가능성에 관한 연구
Applicability of unmanned aerial vehicle for chlorophyll-a map in river
김은주1・남숙현1・구재욱1・이새로미1・안창혁1・박재로1・박정일2・황태문1*
Eunju, Kim
1・Sookhyun, Nam
1・Jae-Wuk, Koo
1・Saromi, Lee
1・Changhyuk, Ahn
1・Jerhoh, Park
1・Jungil, Park
2・ Tae-Mun, Hwang
1*1
한국건설기술연구원,
2호정솔루션
1
Korea Institute of Civil Engineering and Building Technology,
2HOJUNG SOLUTION Incoporation
ABSTRACT
This study was carried out to apply the UAV(Unmanned Aerial Vehicle) coupled with Multispectral sensor for the algae bloom monitoring in river. The study acquired remote sensing data using UAV on the midstream area of Gum River, one of four major rivers in South Korea. Normalized difference vegetation index (NDVI) is used for monitoring algae change. This study conducted water sampling and analysis in the field for correlating with NDVI values. Among the samples analyzed, the chlorophyll concentration exhibited strong and significant linear relationships with NDVI, and thus NDVI was chosen for algae bloom index to identify emergence aspect of phytoplankton in river. Aerial remote sensing technology can provide more accurate, flexible, cheaper, and faster monitoring methods of detecting and predicting eutrophication and therefore cyanobacteria bloom in water reservoirs compared to currently used technology. As a result, there was high level of correlation in chlorophyll-a and NDVI. It is expected that when this remote water quality and pollution monitoring technology is applied in the field, it would be able to improve capabilities to deal with the river water quality and pollution at the early stage.
Key words: Algae bloom monitoring, Chlorophyll-a, UAV(Unmanned Aerial Vehicle), Water quality
주제어: 조류발생 모니터링, 클로로필-a, 무인항공기, 수질분석
행 중에 있으며, 호수, 저수지, 강 및 바다의 수질 모 니터링에 광범위하게 적용되고 있다(Kuster et al., 2006; Moses et al., 2009; Zhang et al., 2003; Chen et al., 2007; Tebbs et al., 2013). 현장 측정과 결합된 원격 탐지 데이터를 이용한 클로로필-a 농도 분석은 다양한 클로로필-a 농도 추정 알고리즘이 개발되어 농도 계산 에 적용되고 있다(Gitelson et al., 2009; Choe et al., 2011; Chen et al., 2008; Tebbs et al., 2013; Brezonik et al., 2005) 그러나, 위성영상을 이용한 수질 인자 측정 기법은 측정 영상과 동시간 측정한 현장 측정 자료의 부족, 정밀한 전처리와 보정 등에 대한 한계점이 있 다. 이에 대한 단점을 보완하기 위해 최근에는 무인항 공기(UAV; Unmanned Aearial Vehicles)를 적용하는 연 구가 진행되고 있다(Watanabe et al., 2016; Flynn et al., 2014; Pajares, 2015; Su et al., 2015; Zaman et al., 2014). 특히, UAV를 이용한 모니터링 기술은 수요가 증가하면서 신속하고 정확한 공간정보를 구축하는 새 로운 기술로 각광받고 있다(Jung et al., 2010; Vega et al., 2015; Su et al., 2015). 최근, 국내에서도 UAV를 이 용한 하천 수질 모니터링에 적용하고자 하는 연구가 시도되어 왔으나, 해외 연구사례에 비하면 미미한 실 정이며, 하천의 녹조 모니터링에 대한 적용사례는 드 물다. 국내의 분광특성을 이용한 원격 추정모형 연구 결과에 의하면 클로로필-a 추정을 위해 다양한 모형으 로 원격탐사에 의한 하천 수질 모니터링에 대한 타당 성을 제시하였다(Lee et al., 2015; Moses, et al., 2014).
따라서, 본 연구에서는 금강 하천 지역을 대상으로 다 중스펙트럼 카메라(Multispectral Camera)가 장착되고, 자율비행이 가능한 고정익 타입의 UAV를 적용하여 하천의 클로로필-a 농도를 추정하였으며, 하천의 클로 로필-a 농도 모니터링의 적용성을 검토하였다.
2. 연구내용 및 방법
2.1 데이터 수집 및 처리
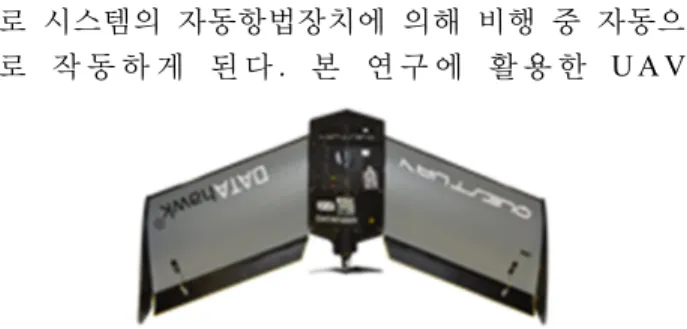
본 연구에서 사용한 UAV 장비는 영국 QUEST사의 고정익 타입의 UAV이다. UAV 무인비행기는 일정 무 게의 물체(통상 센서)를 탑재하고 사전에 비행경로 프 로그램에 의해 작성된 경로를 자율 비행하는 특징을 갖고 있다. 즉, 비행경로작성자가 사전에 측정지점에 대한 GPS 좌표지점을 설정하게 되면 의도한 바대
로 시스템의 자동항법장치에 의해 비행 중 자동으 로 작 동 하 게 된 다 . 본 연 구 에 활 용 한 U A V
Fig. 1. UAV used in this study
무인비행기의 사양은 날개길이 58∼90인치, 무게는 2.5 kg에서부터 6 kg이다. 모터의 경우 미연방항공청 (FAA)으로부터 사용이 승인된 AXI 2820/10 Max 42 AMP 모터가 장착되어 있고, APC사의 프로펠러, Skycircuits SC2 자동항법장치내장, 장착가능 센서는 RGB 카메라 (Sony A6000 미러리스), Twin NDVI 카메라(LUMIX), 다중스펙트럼 카메라(Tetracam 또는 Micasense), 실시 간 비디오촬영(GoPro), 열화상카메라 등의 장착이 가 능한 구조이다. 본 연구에서 사용된 센서는 Micasense사 RedEdge 모델의 12bit 122만 화소 다중스펙트럼 카메라를 사용하였다 . 촬영된 사진은 Orthomosaics, Georeferenced 디지털 표면 모델(DSMs) 및 3D 매핑을 작성하는 사 진 측량 소프트웨어 Pix4D에 의해 처리하였다. 정사 영상의 생성은 촬영된 다수의 이미지와 카메라 교정 변수 등 각종 변수를 상기 프로그램에 입력하여 데이 터 처리를 수행한다. 이후 개별 이미지간 정확한 특징 점을 추출하는데, 이는 동일한 특징점을 이용해 영상 을 서로 접합하는 기술이다. 이러한 처리를 상기 프로 그램에서 자동적으로 반복 수행함으로써 다수의 이미 지로부터 하나의 정사영상이 생성되게 된다.
2.2 연구대상지역
본 연구의 대상지역은 Fig. 2에서 보는바와 같이 최 근 녹조 발생으로 관심을 받고 있는 금강수계 보 전 후 지역을 대상으로 하였다. 1차는 2016년 7월 1일, 2 차는 2016년 9월 10일에 대상 하천 지역을 촬영하였다.
정사영상에 위치오차가 발생하는데, 이를 보정하기 위
하여 지상기준점 (GCP; System Arranging Ground Control
Points)을 촬영전에 사용하게 된다. 즉, 지상기준점은 이
미지 정합 후 생성되는 포인트 클라우드의 정확성을 높
여준다 . 본 연구에서 대상 하천의 수질모니터링을 위해
수립한 비행계획은 다음과 같다 . 비행고도는 150 m에
서 지상해상도 11.9 cm/pixel, 초점길이(Focal Length) 535 mm, 비행시간은 오전 10시 경부터 1회 30분간으로 약 1 km 구간에 걸쳐 lateral overlap–75 %, longitudinal–70
% 이상을 확보하기 위해 9 strip을 촬영하였다. UAV 에 장착되어 촬영된 센서는 블루(Blue)(0.45 μm), 녹색 (Green)(0.52 μm), 적색(Red)(0.66 μm) 및 근적외선 (NIR)(0.85 μm) 영역의 다중스펙트럼 이미지를 생성한 다.
2.3 수질 분석
현장 측정 클로로필-a 농도는 배를 이용해 수심 50 cm 지점의 표층수를 대상으로 온라인 형광강도계 (Multiparameter Portable Fluorometer, MODERNWATER AlgaeChek, UK)로 측정하였다. 하천의 경우 정체수역 에서 조류가 크게 번식하는 구간이 발생되는데, 하천 본 류 및 가장자리의 클로로필-a 농도를 조사하였으며 조사 지점은 Fig. 3과 같다. GPS(Global Positioning System) 장
비를 이용해 각 측정지점에 대한 위치정보를 취득하 였다. 현장 수질 측정 시간은 UAV 촬영 후 1시간 이 내에 측정하였다.
2.4 자료 분석
본 연구에서는 하천의 녹조와 간접적 연관성이 있 는 클로로필-a를 정규화 식생지수(NDVI; Normalized Distribution Vegetation Index)라는 지표와의 상관성 분 석을 통해 클로로필-a 모니터링 기법을 제시하고자 하 였다. NDVI 값은 식생의 클로로필-a 추정에 많이 사 용되는 모델이다(Tong et al., 2017, Mishra et al., 2012). 클로로필-a는 분광센서의 적색(Red) 파장대에 서 낮게, NIR 파장대에서 높게 검출되는 특성이 있다.
클로로필-a는 식물성 플랑크톤이 광합성에 필요로 하 는 빛을 흡수하는 색소로, 클로로필-a 양을 측정하면 수계 내의 식물 플랑크톤의 분포를 알 수 있기 때문 에 수계환경의 부영양화 상태를 평가하는 지표로 사
Fig. 2. Study sites
(a) 1차 (b) 2차
Fig. 3. Distribution of sampling station at each campaign in lake
용한다. 연구에 따르면 초분광센서를 이용한 이미지 로 클로로필-a 추정을 위해서는 적색과 NIR 파장대를 이용한다(Moses et al., 2014, Han et al., 1997). UAV 센 서로 측정된 값은 NDVI로 변환되는데, 식 (1)과 같다.
(1) 여기서, 정규화 식생지수는 적색 영역의 채널과 NIR 영역 채널에서 발생하는 분광차를 이용하여 측정 대상면에 존재하고 있는 식생 특성을 파악하고자 개 발된 지수이다. 가시광선 영역의 적색 밴드와 NIR 밴 드의 관측값을 이용하여 -1~+1 사이의 값을 가지며 식물의 분포 특성 및 생체량 등을 파악할 수 있는 값 으로 사용되고 있다. 음의 값은 식생이 없으며 양의 값이 높을수록 식생의 활력도가 높음을 의미한다.
3. 연구결과 및 고찰
3.1 대상지역 수질분석
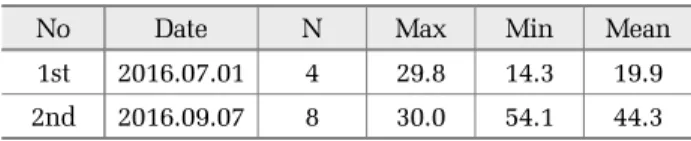
본 연구에서는 클로로필-a 추정 모형의 비교, 검증 을 위해 대상지역을 2차에 걸쳐 수질 분석을 실시하 였다. 수질 실측 결과에서 하천(1차)의 클로로필-a 농 도는 약 15~30 mg/m
3범위로 나타났다. 하천(2차)의 클로로필-a 농도는 약 30~54 mg/m
3범위로 나타났으 며, 하천 본류는 약 52 mg/m
3로 일정한 것으로 나타났 다. 1차 및 2차의 수질 결과는 Table 1과 같다.
Table 1. Chlorophyll-a concentration sampled on 1st and 2nd
No Date N Max Min Mean
1st 2016.07.01 4 29.8 14.3 19.9
2nd 2016.09.07 8 30.0 54.1 44.3
3.2 대상지역 정사영상 생성
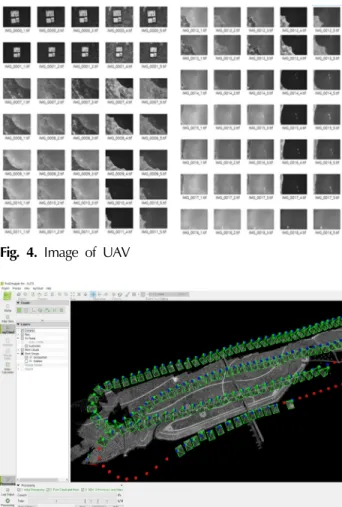
본 연구에 적용한 UAV 촬영 및 영상분석 절차는 아래와 같다. 촬영계획 수립, UAV 영상촬영, 촬영된 영상의 전처리 및 후처리, 자료 분석의 단계로 이루어 진다. 첫 번째, 촬영계획 수립 단계에서는 UAV 촬영 대상 및 촬영대상지를 선정하고, 촬영지역을 분석하 여 UAV 비행계획 등을 수립한다. 두 번째, UAV 영상 촬영 단계에서는 사진 정합시 정확한 위치보정을 위 한 기준점 측량과 사전계획 수립 단계에서 준비된 비
행계획에 따라 UAV 영상 촬영을 실시한다. 세 번째, 전처리 및 후처리 단계에서는 불필요한 사진 제거 및 사진 왜곡 보정, 지리부호화 등 전처리 작업을 실시하 고, 사진정합, 보안시설 및 개인정보 등 후처리 작업 을 실시한다. 마지막으로 자료 분석단계에서는 추출 된 UAV 영상 픽셀의 분광값을 NDVI로 전환하고 실 측 수질 자료를 매칭하여 클로로필 -a 추정식을 산출한 다. 본 연구에서는 무인항공기를 이용하여 대상 하천 지역의 정사영상 생성을 위해 Computer Vision(CV)에서 Lowe(2004)에 의해 개발된 Scale-Invariant Keypoints (SIFT) 알고리즘이 내재된 AgiSoft사의 Pix4D 프로그 램을 이용하였다. 정사영상 생성의 첫 단계로 본 프로 그램에서는 촬영된 다수의 이미지와 카메라 교정변수 등 각종 변수가 상기 프로그램에 입력함으로써 프로 그램을 셋업 시켜서 데이터 처리를 수행한다.
SIFT 알고리즘에 의하여 개별 이미지간 정확한 특 징 점을 추출하게 되는데, 이는 동일한 특징점을 이용 해 영상을 서로 접합하는 기술이다(Xie et al., 2015). 이 러한 처리를 상기 프로그램에서 자동적으로 반복 수행 함으로써 다수의 이미지로부터 하나의 정사영상이 생 성되게 된다. 이렇게 생성된 정사영상에 위치오차가 발 생하는데 , 이를 보정하기 위하여 지상기준점을 촬영전 에 사용하게 된다. 따라서, 본 연구에서도 측정범위 대 상지역 인근에서 지상기준점을 미리 설치하여 측정하 였다. 측정 대상 지역을 2016년 7월과 9월로 2차로 나 누어 측정을 실시하였으며, 1차 촬영 영상은 Fig. 4와 같다. 영상 처리는 Pix4D 프로그램을 이용하여 촬영된 사진 이미지를 각각 사진 GPS 좌표에 따라 배열한 다 음 사진의 공통점을 추출하였다 . 지도 좌표계와 통일된 정사영상을 얻기 위해 앞서 측량했던 GCP 좌표를 불 러오고 각각의 위치를 확인하여 기준점과 동일한 지역 의 지상기준점 입력을 반복하여 입력시킨다. 정렬된 사 진들은 포인트 클라우드를 생성하고, 최종적으로 영상 오류지점을 확인한 후 밴드별 정사영상을 생성하였다 . 생성된 영상의 GCP 오차범위는 X(Horizontal) 및 Y(Vertical) 모두 약 1 cm 이하로 나타났다.
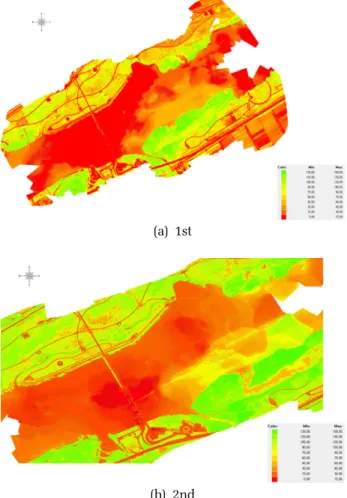
UAV를 활용하여 측정대상 영역에 대한 정사영상
편집을 실시한다 . 정사영상은 UAV를 통해 측정한 3차원
고밀도 포인트 클라우드를 통해서 DSM(Digital Surface
Model)을 생성하는데 일종의 모자이크 이미지로 볼
수 있다 . 좋은 품질의 정사영상 제작을 위해서는 인접한
두 정사영상에 존재하는 접합선 및 모자이크 접합선을
Fig. 4. Image of UAV
Fig. 5. UAV route in this study observation
반드시 확인하여야 한다. 촬영지역의 이미지 위치 정보가 알려진 경우 측정지역 영역이 정의될 수 있다 (Xie et al., 2015). 3D 포인트 클라우드의 모든 노이즈 가 측정대상의 정사영상 편집에 영향을 미칠 수 있기 때문에, 동일한 고도로 서로의 교차점을 유지하면서 최대한 측정 대상지역의 교차지점을 유지하면서 촬영 하였으며, Fig. 5와 같다. 이러한 이유로 하천 녹조 모 니터링을 위해서는 일반 회전익 타입의 UAV 무인항 공기 보다는 장시간 자율비행이 가능하면서, 분광센 서 장착이 가능한 고정익 타입의 UAV 무인항공기의 적용이 국내 하천특성에 맞는 촬영 및 영상분석이 가 능한 것으로 판단된다.
3.3 클로로필-a 추정