Development of the Underwater Cleaning Robot Platform for a Higher Efficiency
11
0
0
전체 글
(2) 서진호 ․ 이정우 ․ 김종걸 ․ 최영호 ․ 최일섭. 을 걸러 내는 로봇을 의미하지만, 본 연구에서는. 일반적으로, 산업현장 내 다양한 수조바닥에는. 다양한 산업현장에서 실제적으로 물을 빼지 않고. 인체에 유해한 성분을 포함한 침전물이 많고, 이. 서는 사람이 직접 수중청소 작업을 수행할 수 없. 것을 적절히 제거해 주지 않으면 생산 공정 차질. 는 시설 등에서 수중 침전물을 직접 흡입하여 외. 및 생산품질에도 영향을 미칠 수 있기에 현장상. 부로 배출하는 방식의 로봇 개발을 의미한다.. 황에 따라서 주기적으로 침전물을 제거하기 위한. 수중청소로봇에 대한 국내외 개발 및 활용 사. 청소작업을 수행해야 하는 실정이다. 다만 이러한. 례는 일반적으로 수영장 및 물놀이 공원 등에서. 작업장 내 청소방법은 일정기간 동안 공장가동을. 사용되는 수중청소기 제품이 대부분이고 국내에. 중단하고 수조 내 물을 모두 빼고 인력을 투입하. 서는 이러한 제품을 수입하여 판매하거나 재조립. 여 청소작업을 수행하는 Fig. 1과 같은 고전적 방. 하여 공급하는 수준이다.1-3) 국외 대표적 수중청소. 법이 대부분이다.4). 로봇은 대부분 수영장 청소를 위한 제품으로서 WEDA, Mariner3S, Acuavac, iRobot 등이 있으며 각 업체별로 대표적 상용화 모델이 있고, 이러한 수영장 청소로봇 수중펌프와 주행 드라이버가 통 합형으로 내장되어 있어서 물을 흡입할 뿐만 아 니라 흡입력을 이용하여 수영장 수직벽면을 이동 하면서 가벼운 벽면청소까지 가능하도록 구성되 어 있는 특징을 가지고 있고 수영장 내에서 위치 인식, 장애물회피, 랜덤방식을 이용한 자율주행 등의 기술개발도 이루어지고 있다. 그러나 이러한 수중청소로봇은 주로 수질 오 염도가 높지 않은 환경에서 활용되는 형태이므 로 산업현장 내에서 사람이 작업하기 어려운 다. Fig. 2 Cistern environment according to water and sludge characteristics. 양한 수조 시설 내에서는 활용하기가 불가능하 며, 산업현장 내에서 활용될 수 있는 수중청소로. 그러나 이러한 방법으로는 주어진 짧은 작업시. 봇은 아직까지도 자율주행 기능이 존재하지 않. 간 내에 다량의 침전물을 청소하기는 불가능하고,. 고 대부분 작업자에 의한 원격조작 작업이 이루. 침전물 성분이 인체에 유해하거나 생산성 효율을. 어지고 있다.. 위하여 시간의 제약 없이 수시로 청소작업이 이 루어져야 하는 경우에도 불가능한 작업방법이다. 더구나 수조 내의 용수 및 침전물의 특성에 따라 서 Fig. 2와 고온형 수조, 강산성 수조, 고점도 및 다량 침전물 등으로 구분할 수 있다. 고온형 수조 는 수조 내 물의 온도가 40도 이상인 경우로서, 로봇 플랫폼 제작 시 고온에서 사용가능한 수중 펌프, 수중모터, 감속기 및 고온용 재질의 방수처 리 부품 등을 고려함으로써 장시간 청소작업을 수행할 경우에도 내구성을 갖도록 함이 중요한 요소이고, 강산성 용액을 사용하는 공정 수조이기 에 작업자의 침전물 제거 작업 시 작업자에 대한. Fig. 1 General cleaning work methods. 각별한 안전사고가 요구되어진다.4). 한국동력기계공학회지 제21권 제3호, 2017년 6월 75.
(3) 고효율 수중청소로봇 플랫폼 기술 개발. 따라서 본 연구에서는 산업현장 내 밀폐형 또. ․청소로봇 운영의 효율성 향상을 위한 제어기. 는 물을 빼지 않고 청소해야 하는 수조환경을 고. 개발 및 운전자의 편의성을 고려한 HMI (Human. 려하여 현재까지 청소방법이 마땅하지 않거나 청. Machine Interface) 시스템 개발. 소작업을 위하여 추가적 수조 설비를 구축해야 하는 방법을 해결할 수 있는 고효율 수중청소로. 3. 연구개발 접근방법 및 수행내용. 봇 플랫폼 기술개발을 제안하고자 한다.. 3.1 현장 환경을 고려한 연구개발 접근방법. 2. 연구목적 및 연구범위. 제안되어진 현장 환경을 고려한 로봇 시스템은 인체에 유해한 점성형태의 침전물을 흡입하여 제. 본 연구목적은 산업현장 내 다양한 수조환경에. 거함과 동시에 고부하 상태에서도 내구성을 유지. 서 적용할 수 있는 로봇 개발을 위하여 기존방법. 할 수 있는 형태로 개발되어져야 한다. 기존의 일. 에 대비 청소성능 및 청소효율 극대화를 위한 개. 반적인 수중청소로봇은 일반용 저수조 침전물을. 발이다. 따라서 다음과 같은 현장작업자의 실제적. 청소할 경우에만 비교적 효과적이라고 할 수 있. 요구조건을 반영하고자 하였다.. 으나, 산업현장 내에서 발생하는 비중과 점성이. ․인체에 유해하고 점성이 높으며 많은 양의. 높은 대량의 침전물을 청소해야 할 경우에는 로. 침전물이 발생하는 환경에서 로봇이 침전물에 파. 봇 플랫폼의 내구성, 주행성능, 청소성능 등을 고. 묻혀 주행하는 경우에도 청소성능의 저하에 대한. 려한 연구개발이 요구되어지고, 특히 청소성능 향. 개선방안 제시. 상을 위한 고기능성 확보를 위해서는 개발 플랫. ․침전물 청소작업에 있어서 최대한의 효율과. 폼의 주요 부품들에 대한 고부하 및 고강성 등에. 최적의 청소성능을 유지하기 위한 침전물 흡입능. 적합한 로봇 플랫폼 개발이 필요하다. 따라서 본. 력 향상, 주행성능 개선, 침전물 함수율 향상 등의. 연구에서 개발되어질 로봇 플랫폼은 현장에서의. 요구조건 반영. 활용조건을 고려하여 다음과 같은 주요사항을 반. ․작업현장 내 사용자 개인 감각과 육안을 로. 영하였다.. 봇을 운영하는 기존 방법에서 벗어나 수조 내 주. 첫째로, 산업현장 내 발생하는 고비중 및 고점. 변 환경과 위치파악에 대한 종합적 자료를 활용. 성을 가지는 대량의 침전물 제거를 위해서는 펌. 하여 운전자가 효율적으로 활용할 수 있는 사용. 핑(Pumping) 능력이 향상된 수중펌프 적용이 필요. 자 기반의 통합운영시스템 구현. 하므로 Vortex Impeller 형태보다 수압성능 및 신뢰. ․로봇 운영에 있어서 청소작업의 효율성 향상. 성이 높은 Contra Block Impeller 형태를 활용한다.. 을 위하여 수조 조건 및 침전물 상태 등을 자동. Contra Block Impeller 형태는 CFD (Computational. 인지하여 침전물 흡입과 주행을 자동으로 조절할. Fluid Dynamics) 및 광범위한 유체 테스트를 통하. 수 있는 제어 시스템 개발. 여 3 inch 이하의 통로를 제공함으로써 고형물을. ․사용자의 원활한 로봇 운전과 수조 내에서 로봇의 위치 및 방향 설정 등을 위한 방향 제어 시스템 개발. 펌핑하여 이송할 수 있도록 개발되었다. 둘째로, 산업현장 내 대량의 침전물을 빠르게 처리하기 위해서는 침전물 용량에 따라서 흡입할. 따라서 본 연구에서는 이러한 사용자 요구사항. 수 있도록 흡입구를 경사식(Tilting) 구조로 설계하. 을 고려하여 산업현장 내 다양한 수조 환경에서. 여 침전물을 흡입할 수 있는 이중방식(Dual type). 적용할 수 있는 고효율 수중청소로봇 플랫폼 개. 의 전방 스크류(Forward screw) 적용이 필요하다.. 발범위를 다음과 같이 선정하였다.. 특히 개발되어질 로봇 플랫폼은 전방 부분에 쌓. ․다양한 수조 환경에서 적용가능하며 로봇 청 소성능 및 청소효율 향상을 위한 플랫폼 개발. 76 한국동력기계공학회지 제21권 제3호, 2017년 6월. 여 있는 침전물의 양에 따라 전방 스크류 자세를 변화시킬 필요가 있고, 침전물의 양에 따라서 자.
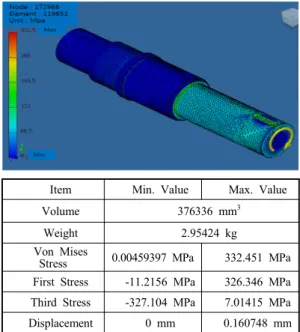
(4) 서진호 ․ 이정우 ․ 김종걸 ․ 최영호 ․ 최일섭. 세를 변형하여 대량의 침전물을 모으고 흡입할 수 있는 구조로 개발하였다.. 그 결과로, 주행성능 향상을 위하여 기존 트 랙 기반 형태가 아닌 삼각형 형태의 트랙을 적. 셋째로, 개발되어질 로봇 플랫폼은 추진력 향상. 용하여 노면 접지력 및 주행성능을 향상시켰고,. 을 위하여 로봇 접지면 확대 및 기계 강도를 향상. 캐터필러에 사용될 고무 크롤러 형태는 작업환. 시킬 수 있는 삼각형 구조(Triangle type)의 캐터필. 경 조건을 고려하여 수중 작업지면 손상 최소화,. 러(Caterpillar) 적용이 필요하다. 기존의 일반적 청. 저진동 및 저소음, 낮은 접지압, 경량화 및 고속. 소작업용 캐터필러는 바퀴가 헛돌거나 미끄러져. 이동 등을 검토하였다. 따라서 고무 크롤러는 같. 추력이 약화되는 현상이 발생할 수 있기에, 실제. 은 중량의 바퀴형 장비에 비해 2배 이상의 견인. 적으로 적용되어질 형태는 실제 활용될 작업환경. 력을 가짐으로써 탁월한 작업이 가능하도록 고. 을 고려하여 최대한 접지면적을 높이기 위한 구. 려하였다.. 조 및 방지턱 또는 경사로 주행을 위한 해결방안 제시가 필요하였다. 이러한 사항을 고려하여, 본 연구개발에서는 청 소성능 및 청소효율 향상을 위한 로봇 플랫폼 개 발 및 로봇 플랫폼 통합운영의 효율성 향상과 운 전자 편의성을 고려한 HMI 시스템 개발로 요약되 어질 수 있다.. 3.2 연구개발 수행내용 3.2.1 로봇 플랫폼 개발 1) 주행 메커니즘 설계 산업현장 내 밀도와 비중이 높은 성분이 다량 포함된 침전불 청소작업을 위한 로봇 설계에서 는 침전물이 끼거나 다량의 침전물을 밀어붙여 흡입해야 할 경우에 로봇 본체에 부하가 가해져 안정적 주행에 방해가 되거나 주행 시 본체의 취 약부분이 파손될 우려가 있으므로 이러한 부분 에 대한 개선사항을 고려함이 필요하다.6) 따라서. Item. Min. Value. Max. Value. Volume. 376336 mm3. Weight. 2.95424 kg. Von Mises Stress. 0.00459397 MPa. 332.451 MPa. First Stress. -11.2156 MPa. 326.346 MPa. Third Stress. -327.104 MPa. 7.01415 MPa. Displacement. 0 mm. 0.160748 mm. Fig. 4 The structural analysis of speed reducer. 본 연구에서는 실제적 수중로봇 작업환경을 고 려하여 Fig. 3과 같이 다양한 개념설계를 진행하. 또한 활용조건을 고려하면 로봇 플랫폼 설계 에서 굽힘과 비틀림 모멘트가 동시에 발생할 경. 였다.. 우에 과부하 적용 시 항복응력을 이기지 못하고 파손이 발생할 수도 있으므로 굽힘과 비틀림이 동시에 작용하지 않는 구조설계가 필요했다. 이 러한 구조설계 조건을 가정하여 부하용량 및 기 계강도 향상을 고려하여 Fig. 4와 같이 감속비 1/150 설계 및 해석을 수행하여 내구성이 가장 높은 구조임을 확인하였다. 추가적으로도 Fig. 5 와 같이 유성기어, 베벨기어, 감속기 출력축 등도 Fig. 3 The proposed caterpillar models. 구조 해석 결과를 통하여 로봇 플랫폼 제작에 반 영하였다. 한국동력기계공학회지 제21권 제3호, 2017년 6월 77.
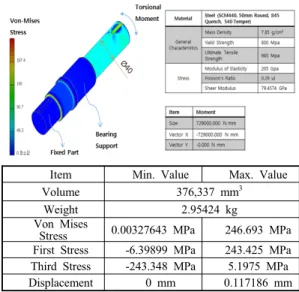
(5) 고효율 수중청소로봇 플랫폼 기술 개발 3-Step 2-Step Motor Motor Reduction Gear Motor Motor Torque Gear Torque Power Rotation (Normal) (Max.) Ratio Torque Torque [rpm] (3-Step) (Trate) (Tpeak) [W] [N-m] [N-m] [N-m] [N-m]. Spec. 750. 3,000. Item Volume Weight Von Mises Stress First Stress Third Stress Displacement. 2.43. 4.86. 75. 182.25 364.5. Min. Value Max. Value 158,338 mm3 1.24295 kg 0.017687 MPa. 401.808 MPa. -161.655 MPa -496.067 MPa 0 mm. 532.284 MPa 173.851 MPa 0.04545 mm. (a) planetary gear. Item Volume Weight Von Mises Stress First Stress Third Stress Displacement. Item Volume Weight Von Mises Stress First Stress Third Stress Displacement. Min. Value Max. Value 376,337 mm3 2.95424 kg 0.00327643 MPa. 246.693 MPa. -6.39899 MPa -243.348 MPa 0 mm. 243.425 MPa 5.1975 MPa 0.117186 mm. (c) output axis of speed reducer Fig. 5 The structural analysis results 결론적으로, 산업현장 내 다양한 수조환경 조건 에서 활용될 수 있는 수중청소로봇 플랫폼은 대 량의 침전물을 효과적으로 청소하기 위한 고강성 하드웨어 플랫폼 설계 및 모멘트가 걸리는 모든. Min. Value Max. Value 290725 mm3 2.28219 kg 0.033881 MPa. 347.811 MPa. -76.4081 MPa -267.456 MPa 0 mm. 432.203 MPa 69.788 MPa 0.0947505 mm. (b) bevel gear 3-Step 2-Step Motor Motor Motor Motor Torque Torque Reduction Gear Gear Power Rotation Ratio Torque Torque (Normal) (Max.) [rpm] [N-m] [N-m] (3-Step) (Trate) (Tpeak) [W] [N-m] [N-m]. Spec. 750. 3,000. 2.43. 4.86. 150. 364.50 729.00. Fig. 6 A structural drawing of underwater cleaning robot. 78 한국동력기계공학회지 제21권 제3호, 2017년 6월.
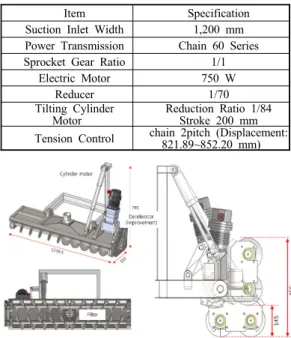
(6) 서진호 ․ 이정우 ․ 김종걸 ․ 최영호 ․ 최일섭. 구동부는 굽힘과 비틀림이 동시에 작용하지 않거 나 굽힘이 최소한으로 발생하도록 하는 구조 설 계, 침전물 청소작업에서 필요에 따라 전방부 및 하부 침전물을 교대로 청소하기 위한 스위칭 밸 브를 추가하여 흡입방향을 선택할 수 있는 구조 로 Fig. 6과 같이 설계하였다.. Item Suction Inlet Width Power Transmission Sprocket Gear Ratio Electric Motor Reducer Tilting Cylinder Motor Tension Control. Specification 1,200 mm Chain 60 Series 1/1 750 W 1/70 Reduction Ratio 1/84 Stroke 200 mm chain 2pitch (Displacement: 821.89~852.20 mm). 2) 펌핑 및 스크류 메커니즘 설계 다양한 수중 침전물의 효과적 제거를 위해서는 수동밸브를. 장착한. 듀얼. 펌핑. 메커니즘(Dual. pumping mechanism)을 적용하여 전방흡입장치와 하부흡입장치의 필요에 따라서 밸브 전환으로 펌 핑 방향을 선택할 수 있는 구조로 설계하였다.7) 이러한 설계개념은 침전물 흡입에 대한 선택과 집중으로 펌핑과 토출 효과를 극대화하기 위한 방안으로 Fig. 7과 같은 개념으로 설계되었다. 또 한 전방부 침전물의 흡입 효율을 향상시키기 위. Fig. 8 The specification and tilting angle of front screw. 하여 복열 틸팅 방식으로 전방 스크류를 설계하 였고, 설계되어진 사양 및 주요사양은 Fig. 8과 같 이 정리되어진다. 본 개발에서는 전방 침전물의 흡입 효율을 향상시키기 위하여 전방 흡입구는 복용 파쇄기형 스크류 형태로 구성하였는데, 이러 한 구조는 딱딱한 침전물을 파쇄하거나 점성이 높은 침전물을 문질러서 잘 흡입할 수 있는 구조 로 흡입구 면적이 넓어져서 다량의 침전물을 모 을 수 있는 장점을 가지도록 설계되어졌다. 전방부 복열 스크류 외에 흡입구 틸딩 방향 전 환기능이 가능하도록 구성하여 전방 흡입구 면적 이 넓어져서 다량의 침전물을 모을 수 있도록 하 였으며, 틸팅 모터 조절을 통하여 흡입구가 침전 물 면에 가깝게 닿을 수 있도록 해서 침전물 벽에. Fig. 9 Double action screw and platform type 대한 주행 극복능력이 향상될 수 있도록 구성하 였다. 개발 플랫폼의 장착 개념도는 Fig. 9와 같이 표현되어진다. 수중청소 작업상황에 따른 전방 흡입부 모듈에 대한 구조해석은 작업 시 직접적으로 부하를 받는 흡입부. 커버에. 대하여. 진행하였다.. 크기는. 300×1,200×1,600 mm이며, 20×30 mm의 사각 구조에 얇은 판은 덮은 형태이고 양 끝단에는 스크류를 고 정하기 위한 15T 판이 있다. 주요 조건은 모든 재 료의 재질은 SUS304를 사용하였다. 부하조건은 Fig. 7 Concept mapping of valve circuit. 한국동력기계공학회지 제21권 제3호, 2017년 6월 79.
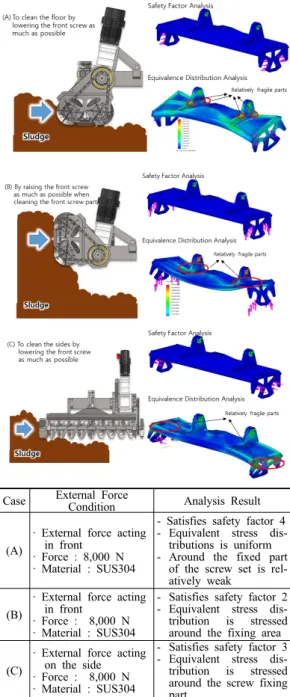
(7) 고효율 수중청소로봇 플랫폼 기술 개발. 할 때 맞닿아 있는 침전물 경사면으로부터 받게 되는 힘을 가정하였다. 구조해석은 ANSYS Tool을 사용하여 그 결과는 Fig. 10과 같이 나타내어진다. 모든 방향은 부하 조건에서 만족하였지만, 축 방향 부하에 대해서는 상대적으로 안전계수가 낮 았으며 전체적으로 4bar 링크와 연결되는 관절 부 위가 상대적으로 취약한 것으로 나타났다. 따라서 이러한 결과를 바탕으로 점성이 높은 전방부 침 전물 흡입을 위하여 플랫폼 설계 시 복열 스크류 를 적용하였고 다양한 형태의 침전물에 대응하기 위하여 리프팅 및 틸팅이 가능한 구조를 적용하 여 제작하였다. 3) 수중청소로봇 플랫폼 앞에서 언급되어진 로봇 플랫폼 개발사양을 고 려하여 최종적으로 수중청소로봇의 규격 및 주요 사양 그리고 실제 조립된 플랫폼은 Fig. 11과 같 이 구성되어진다.. Case. External Force Condition. Analysis Result. - Satisfies safety factor 4 · External force acting - Equivalent stress disin front tributions is uniform (A) · Force : 8,000 N - Around the fixed part · Material : SUS304 of the screw set is relatively weak · External force acting - Satisfies safety factor 2 in front - Equivalent stress dis(B) · Force : 8,000 N tribution is stressed · Material : SUS304 around the fixing area - Satisfies safety factor 3 · External force acting - Equivalent stress dison the side tribution is stressed (C) · Force : 8,000 N around the screw fixing · Material : SUS304 part. Fig. 10 Structural analysis of platform mechanism according to cleaning situations 약 8,000 N(로봇이 미는 힘: 7,839 N)으로 두고 ,. , 축 방향으로 작용함에 대하여 각각 해석하였다. 각 방향의 의미에서 축과 축은 각각 흡입구 커버 를 내렸을 때와 올렸을 때이고, 축은 로봇이 회전. 80 한국동력기계공학회지 제21권 제3호, 2017년 6월. Fig. 11 Standardization and specification of underwater cleaning robot.
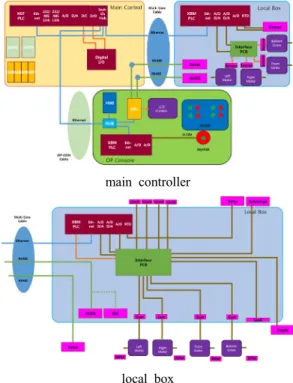
(8) 서진호 ․ 이정우 ․ 김종걸 ․ 최영호 ․ 최일섭. 3.2.2 제어기 및 HMI 시스템 개발 1) 전기회로 및 전장 시스템 개발되어질 로봇의 현장운영의 효율성 향상을 위하여 전기회로 및 전장 시스템 제작은 Fig. 12 와 같이 개발되어졌다. 시스템 구성에서, 메인 제 어기는 전면에 전원스위치 및 전원관련 조작스위 치가 배치되도록 하였으며, 하단에는 로봇과 연결 되는 전원공급, 제어신호 커넥터 등을 배치하였 다. 컨트롤러 내부에서는 메인 제어용 PLC, 컨트. main controller. 롤용 DC 전원장치, 로봇구동용 DC 전원장치 등 으로 구성하였다.. Fig.. 12. Configuration. of. inside/outside. local box. main. controller. Fig. 13 System configuration of main controller and local box. 메인 제어기의 제어시스템은 상위의 메인 제어 시스템과 하위의 운영콘솔, 로컬제어시스템으로. 2) 운영 콘솔 및 HMI 시스템. 구성하였다. 상위 및 하위 시스템은 산업용 Fast. 산업현장의 다양한 수조 환경에서 운전 가능한. Ethernet으로 연결되어 많은 양의 정보를 빠르게. 로봇 개발에서는 각 구동기별 운전상황에 대하여. 상호공유하도록 구성하여 제어성능을 향상시켰고,. 세밀한 정보를 운전자에게 실시간으로 제공하면. 운전자가 한 곳에서 여러 시스템의 제어와 정보. 서 현재의 수조 및 침전물 상태를 고려한 최적의. 모니터링이 가능하도록 구성하였다. 특히 로컬 제. 제어를. 어기 박스와 메인 제어기 사이에는 거리가 있어. console) 구현이 필요하다. 운영 콘솔에서는 로봇. 서 배선으로 연결하여 제어하는 방법은 무리가. 의 전반적 조작을 수행할 수 있으며, HMI 장치를. 있기에 산업용 필드버스 Fast Ethernet 네트워크. 통하여 로봇의 동작상태 및 기능설정 등을 변경. 방식을 적용하여 하나의 채널을 이용하여 송수신. 하거나 제어할 수 있어야 한다. 또한 운영 콘솔은. 이 주기적으로 변화되면서 통신을 수행하도록 구. Fig. 14와 같이 구성하면서, 내부에 각종 제어부. 성하였다. 메인 제어기 시스템 및 로컬 박스 구성. 품, 항법용 SBC 등이 내장되어 있기 때문에 현장. 도는 Fig. 13과 같이 표현되어진다. 또한 로컬 제. 내에서 휴대 및 운반이 쉽도록 구성하였다.. 수행하기. 위한. 운영. 콘솔(Operating. 어 박스는 로봇에 장착된 각종 센서와 구동 모터. HMI 시스템은 로봇의 동작상황을 화면상에서. 에 전원 공급 및 통신회선을 연결해 주는 것으로,. 로봇의 주행속도, 펌프 및 스크류 상태 등을 확인. 이렇게 복잡하게 연결된 단말 장치들을 몇 개의. 하고 조절할 수 있으며, 센서 데이터 모니터링,. 회선만으로 먼 거리까지 케이블을 통하여 메인. 이상상태 확인, 자동운전, 로봇과 연결된 장치 상. 제어기 캐비닛과 전원 및 통신이 가능하도록 해. 태 등을 확인할 수 있도록 Fig. 15와 같이 구성하. 주는 일종의 분배장치이다.. 였다.. 한국동력기계공학회지 제21권 제3호, 2017년 6월 81.
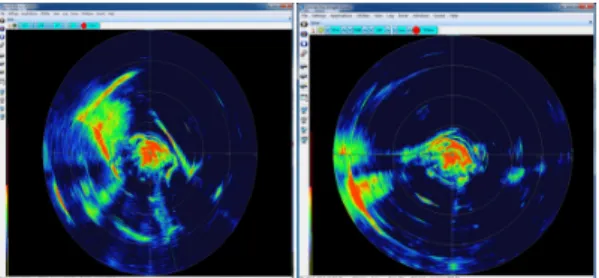
(9) 고효율 수중청소로봇 플랫폼 기술 개발. Fig. 16 Industrial underwater workplace Fig. 14 Block diagram of operating console system. 간당 5[rube] 정도를 제거할 수 있을 것임을 추정 하여 수행하였다. 본 환경에서는 수중 침전물의 점도가 높아서 수중펌프 흡입구 막힘 현상이 다수 발생했음에도 불구하고, 초기 300 m 토출 호스를 이용한 침전물 흡입 및 청소 진행은 실제적으로 현장 활용성을 보여 주었고, 특히 Fig. 17과 같이 소나센서를 이 용한 수조 내 로봇 위치 파악 및 침전물 위치를 파악할 수 있음을 확인하였다.. Fig. 15 Main screen of HMI HMI 메인 화면은 로봇동작의 전반적 상태를 한 화면에 표시하여 기본적 속도 및 모드 설정 상 태를 확인할 수 있도록 구성하였으며, 화면 구성 은 운전자의 편의성을 고려하여 로봇 주행트랙 모터 구간, 펌프 구간, 전원 및 센서 상태 구간, 스크류 구동 모터 구간으로 하는 4개 구간을 구분 하여 구성하였다. 특히 메인 화면에서 페이지 전 환은 하단의 메뉴 전환 아이콘을 눌러 원하는 화 면으로 페이지를 전환할 수 있도록 구성하였다.. 4. 현장 실험 산업현장 내 다양한 수조환경에 적용하기 위하 여 개발되어진 수중청소로봇의 유용성을 확인하 기 위하여, Fig. 16과 같은 산업체 수조를 활용하 여 실증실험을 진행하였다. 수조 내부 침전물은 수조 크기(6 m×10 m×1 m)의 약 90% 이상 정도로 고려되며, 개발되어진 로봇을 활용한 작업 시 시. 82 한국동력기계공학회지 제21권 제3호, 2017년 6월. Fig. 17 The experimental results of cistern environment using sonar sensor 본 현장실험을 통하여, Fig. 18과 같이 개발되어 진 수중청소로봇을 활용한 현장실험 완료 후 현 장 환경을 확인한 결과, 12 m×9 m 수조환경 내 평균 40 cm 침전물 상태에서 12×9×0.4=43[rube]를 처리하였고, 이러한 결과는 결과분석상의 침전물 제거량과 유사한 결과를 도출하였다. 다만, 이물질이 다량 포함된 수조환경에 대한 해결방안 및 자동제어 파라메터 튜닝 등을 통한 자동제어 알고리즘 개발 및 운용 프로세스 재정 립 등의 추가적인 개발이 필요한 사항도 확인하 였다. 또한 침전물 내에 포함되어 있는 다양한 이 물질(석면보드, 공사자재 등)이 전방 흡입구를 막.
(10) 서진호 ․ 이정우 ․ 김종걸 ․ 최영호 ․ 최일섭. 는 경우와 구동 기구부에 끼어 로봇 오동작이 발. 후 기. 생하는 경우에 대체하여 로봇 플랫폼 손상이 발 생하지 않도록 하는 제어기술의 추가적 연구개발 이 필요할 것으로 판단되어진다.. 본. ‘산업체. 연구는. 기술개발. 위탁과제. (POSROBOT Research Project)’ 지원으로 수행되었 으며 지원에 감사드립니다.. References 1. Alexander. V.. Inxartsev,. 2009,. "Underwater. Vehicles", In-Tech, Vol. 12. 2. Y. J. Hong, M. J. Lee and J. H. Suh, 2009, "Underwater Cleaning Robot", Journal of Korea Robotics Society, Vol. 6, No. 2, pp. 10-15. Fig. 19 The experimental results. 3. J. H. Suh, Y. J. Hong and S. K. Park, 2010, "The Commercialization of Underwater Robot using convergence Technologies", In Proceedings. 5. 결 론. of Korea Unmanned Underwater Vehicle, pp. 41-45.. 본 연구개발에서는 산업현장 내 다양한 수조. 4. I. S. Choi, G. Shin and J. H. Suh, 2013,. 환경에 적용하여 활용할 수 있는 로봇 플랫폼의. "Development of Underwater Cleaning Robot for. 기구부 및 전장부 개발을 수행하였다. 또한 개발. Industrial Sludge Cisterns", Journal of the Korea. 되어진 로봇 플랫폼의 유용성을 확인하기 위하. Robotics Society, Vol. 10, No. 4, pp. 33-39.. 여 적용환경 현장실험을 통한 실증실험을 수행. 5. Robot Issue Brief, Korea Institute for Robot. 하였고, 기존에 청소가 불가능한 환경에 대하여. Industry Advancement(KIRIA), 2014, "Industrial. 개발된 로봇 플랫폼 주요 성능 및 활용성을 확인. Status and Prospect of Underwater Robot", Vol. 2.. 하였다. 특히 수중 카메라 영상으로는 수중환경. 6. J. G. Kim, J. W. Park, Y. H. Choi, J. D. Lee,. 을 전혀 확인할 수 없는 산업체 작업현장에서도. J. W. Lee, H. J. Lee, S. S. Oh and J. H. Suh,. 청소작업이 가능하도록 로봇 플랫폼 개발뿐만. 2015, "Development of Driving Reducer for. 아니라 무인청소 기능을 추가하여 성능검증을. Underwater Cleaning Robot", In Proceedings of. 완료하여 다양한 작업환경에서 활용할 수 있도록. the Korean Society of Precision Engineering, pp.. 개발하였다.. 756-757.. 향후에는, 기존에 전혀 청소방법이 없었던 밀. 7. J. W Park, J. G. Kim, J. W. Lee, Y. H. Choi,. 폐형 및 고온환경 침전물 수조 등에서도 청소가. J. H. Suh, J. D. Lee, H. J. Lee and S. S. Oh,. 가능하도록 하기 위하여 기존의 로봇 플랫폼 기. 2015,. 능 이외에 작업환경 내 다양한 제약조건을 극복. Track-based Underwater Robot Intake Module. 할 수 있는 자동제어 알고리즘을 추가 개발이 필. for Various sludge Suction", In Proceedings of. 요함을 확인하였다. 따라서 추가적인 연구개발을. the Korean Society of Precision Engineering, pp.. 통하여 작업현장 내에서 활용성을 극대화하도록. 612-613.. 할 것이며, 이러한 개발업무를 통하여 실용화 및 상용화 제품개발을 추진할 예정이다.. "Design. and. Structural. Analysis. of. 8. J. W. Lee, Y. H. Choi and J. H. Suh, 2015, "Power Consumption Analysis and the Energy-. 한국동력기계공학회지 제21권 제3호, 2017년 6월 83.
(11) 고효율 수중청소로봇 플랫폼 기술 개발. Efficient Control Method of the Underwater. Robotics Society, Vol. 8, No. 1, pp. 37-42.. Robot System", In Proceedings of ICESEE. 10. ROV, URL: www.rovtech.com. 2015, pp. 68-71.. 11. Tritech, URL: www.tritech.co.uk. 9. J. H. Han, J. S. Ok and W. K. Chung, 2012, "Localization PETASUS. and System. Autonomous II. for. 12. Korea Institute of Marine Science & Technology. Control. of. Promotion(KIMST),. Manipulation. in. Insight, pp. 4-5.. Structured Environment", Journal of Korea. 84 한국동력기계공학회지 제21권 제3호, 2017년 6월. Vol.. 10,. 2016,. Ocean.
(12)
수치

+5

관련 문서
A Study on the Development of Ship’s Ballast Water A Study on the Development of Ship’s Ballast Water A Study on the Development of Ship’s Ballast Water A Study on the
A comparison of the cleaning efficacy of short-term sonic and ultrasonic passive irrigation after hand instrumentation in molar root canals.. Ultrasonic
Figure 6-15 shows a distribution for the typical cost components of OPEX for a deepwater development. The percentage of each cost component of the total OPEX varies from
The torque analysis was performed acting on the joint of robot by modeling the kinematics and dynamics of the robot.. Load torque of the joint
Development of Low - Temperature Fuel Performance Analysis Code for Micro Ultra Long Life Lead - cooled Fast Reactor. Ji Won Mun and
This bill has focused to elevate efficiency of environmental assessment for administrative plans and development projects by way of uniting the preparatory environmental
KEY WORDS: Position estimation system 위치추정 시스템; Hull cleaning robot 선체 청소로봇; Optical displacement sensor 광 변위센서; Dead reckoning
When efficiency was compared by classifying companies according to the number of employees, total asset and sales, larger companies showed higher technical efficiency
