Received 17 November 2020, Revised 08 March 2021, Accepted 16 March 2021 *Corresponding Author Nam-Ho Kim (E-mail: [email protected], Tel:+82-51-629-6328)
Department of Control and Instrumentation Engineering, Pukyong National University, Busan 48513, Republic of Korea.
https://doi.org/10.6109/jicce.2021.19.1.54 print ISSN: 2234-8255 online ISSN: 2234-8883
This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License (http://creativecommons.org/licenses/by-nc/3.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Copyright ⓒ The Korea Institute of Information and Communication Engineering
Modified Gaussian Filter based on Fuzzy Membership
Function for AWGN Removal in Digital Images
Bong-Won Cheon1 and Nam-Ho Kim2* , Member, KIICE
1Department of Smart Robot Convergence and Application Engineering, Pukyong National University, Busan 48513, Republic of Korea 2Department of Control and Instrumentation Engineering, Pukyong National University, Busan 48513, Republic of Korea
Abstract
Various digital devices were supplied throughout the Fourth Industrial Revolution. Accordingly, the importance of data processing has increased. Data processing significantly affects equipment reliability. Thus, the importance of data processing has increased, and various studies have been conducted on this topic. This study proposes a modified Gaussian filter algorithm based on a fuzzy membership function. The proposed algorithm calculates the Gaussian filter weight considering the standard deviation of the filtering mask and computes an estimate according to the fuzzy membership function. The final output is calculated by adding or subtracting the Gaussian filter output and estimate. To evaluate the proposed algorithm, simulations were conducted using existing additive white Gaussian noise removal algorithms. The proposed algorithm was then analyzed by comparing the peak signal-to-noise ratio and differential image. The simulation results show that the proposed algorithm has superior noise reduction performance and improved performance compared to the existing method.
Index Terms: Image processing, Fuzzy membership function, Noise removal, AWGN
I. INTRODUCTION
Image noise occurs for various reasons during data acqui-sition and transmission processes. This noise affects the sys-tem performance; image processing techniques are combined for various purposes. Image processing is widely used in areas such as image analysis, computer vision, and autono-mous driving vehicles. Filtering is used as a preprocessing technique to remove the noise in images for better image recognition or to improve image quality [1-6].
Additive white Gaussian noise (AWGN) is a typical noise type generated during a data communication process, named that for the characteristic that thermal noise ruins cation systems [7-9]. AWGN is generated in most communi-cation systems and all frequency bandwidths; it is the most considered noise in the noise removal process. Various
stud-ies have been conducted to remove AWGN using approaches such as the average filter (AF), edge detection wiener filter (EDWF), and fuzzy logic-based filter (FLBF) [10-12]. How-ever, existing filters have a drawback in that information is damaged when noise is removed if there are too many edge components [13-16].
This study proposes a modified Gaussian filter algorithm that calculates its output using an estimate according to the standard deviation of pixels inside the filtering mask, the input image, and fuzzy membership function [17-20]. The proposed algorithm determines a Gaussian filter coefficient according to the standard deviation, and an estimate is calcu-lated according to the membership degree after setting the fuzzy membership function. The final output is calculated by adding or subtracting the Gaussian filter output, and an esti-mate is obtained using the fuzzy membership function.
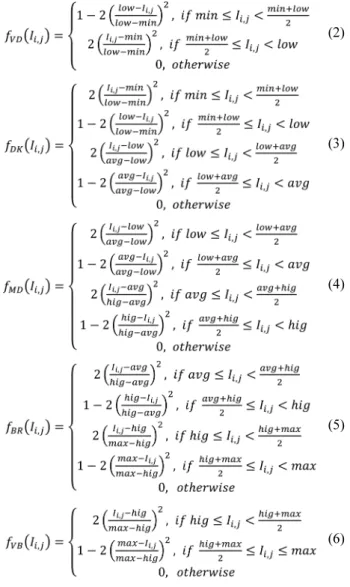
weight according to the pixel value. The membership func-tion classifies images into VD (very dark), DK (dark), MD (mid), BR (bright), and VB (very bright) according to the pixel value based on an 8-bit gray image.
The membership function in fuzzy logic refers to the membership grade for each element of the fuzzy set. The proposed algorithm calculates the fuzzy membership func-tion using a quadratic funcfunc-tion based on the maximum, min-imum, and mean values of all pixel values in the image.
(2)
(3)
(4)
(5)
(6)
Fig. 1 shows the membership function in the proposed algorithm.
The membership function is expressed as fα(Ii,j) and fβ(Ii,j). Here, α and β refer to the membership functions to which Ii,j belongs.
An estimate is calculated using the pixel values of the fil-tering mask and membership function. When the member-ship functions of the input pixel values are fα(Ii,j) and fβ(Ii,j), the estimates and βi,j of the functions can be obtained by the convolution of the filtering mask and fuzzy member-ship function as follows:
(7)
(8)
(9)
(10)
Here, ai,j and bi,j refer to the sums of the membership functions used in the convolution.
The fuzzy output hi,j, which is calculated using the esti-mate of the membership function, is as follows:
(11) αˆi j,
Fig. 2 shows the fuzzy membership function value, and Fig. 3 presents an example of the calculation of an estimate of the fuzzy membership function.
To determine the final outcome, the standard deviation of the filtering mask was calculated. The standard deviation θai,j of the filtering mask, which is set in coordinates i,j is as follows:
(12)
Here, Mi,j refers to the mean of filtering mask Mi,j. When filtering is progressed up to the coordinate i,j, assuming that the mean of the standard deviations calculated up to that coordinate is δi,j, the weight Gi,j(x, y) of the Gaussian filter is calculated as follows:
(13) (14)
The output gi,j of the Gaussian filter is calculated by the convolution of the filtering mask and Gaussian filter weight
as follows:
(15) The weight was calculated to compute the final output of the filter. The weight ωi,j is calculated by comparing θi,j and δi,j as follows:
(16)
Here, the function max[A, B] compares A and B and out-puts the larger of the two. γ is a constant that determines weight. Because the value of γ is larger, it shows better noise removal performance in images with strong noise.
The final output Oi,j is calculated by adding or subtracting the fuzzy output and Gaussian output according to the weight.
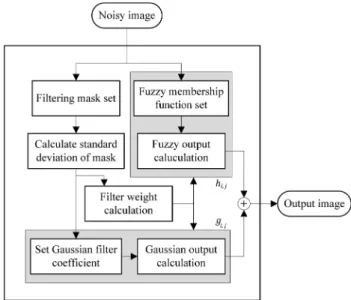
(17) Fig. 4 shows the flowchart of the proposed algorithm.
III. SIMULATION AND RESULTS
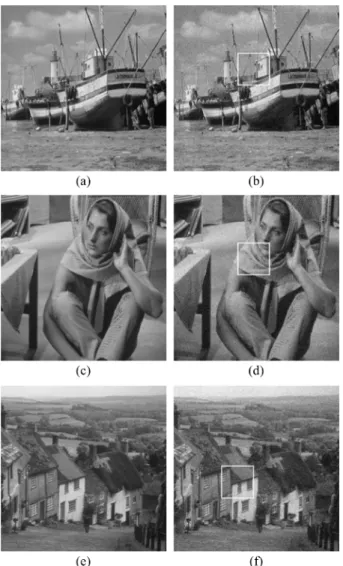
In this study, the Baboon, Barbara, and Goldhill images, which are 512 × 512 sized 8-bit gray images damaged by AWGN with σ = 10, as shown in Fig. 5, were simulated using MATLAB. Additionally, the performance of the pro-posed algorithm was compared with the existing AF, EDWF, and FLBF using different images and PSNR [21-23].
Each filter was processed with a 3×3 mask with n = 1, and Fig. 2. Example of fuzzy membership function.
Fig. 3. Membership function output calculation.
based on the simulation results under various conditions, the proposed algorithm showed the best performance when γ = 0.8. The differential image was calculated by applying the absolute value and multiple of four to the pixel value dif-ference between the two images to distinctively compare the filtering results with the original image.
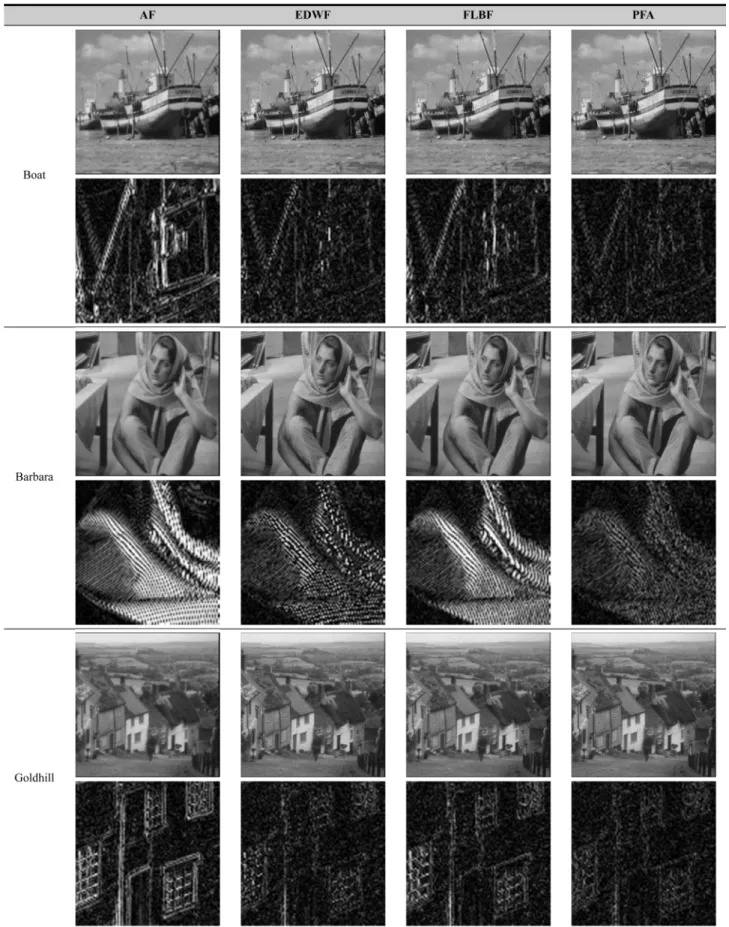
Fig. 6 shows the results processed with AF, EDWF, FLBF, and the proposed filter algorithm (PFA) on the Boat, Bar-bara, and Goldhill images as well as the differential images. Tables 1 to 3 present the PSNR of the simulation results according to the standard deviation of AWGN.
The results processed with AF showed that a differential image was significantly displayed in the boundaries of the image, particularly in the mast and boundaries of the boat image and stripe areas in the Barbara image, resulting in poor performance.
The results processed with EDWF demonstrated that supe-rior performance was displayed in the images for which the
standard deviation of AWGN was relatively low; however, the PSNR comparison results showed that as the standard deviation increased, the noise removal performance was sig-nificantly degraded.
The results processed with FLBF demonstrated that excel-lent noise removal performance was displayed in images where the image pixel value was not significantly changed, but a differential image was displayed in areas where the edge components were strongly displayed, resulting in rela-tively poor performance.
The results processed using the proposed algorithm showed that a sharp picture was verified compared to other existing methods, and the differential image was smaller even in the edge components where the pixel value was sig-nificantly changed, removing the AWGN.
The proposed algorithm produced 31.75 [dB] in the Boat image damaged by AWGN whose standard deviation was σ = 10, and the noise was improved by 2.79 [dB], 0.85 [dB], and 2.55 [dB] compared to AF, EDWF, and FLBF, respec-tively. The proposed algorithm produced 29.07 [dB] in the Barbara image, which improved the noise by 4.09 [dB], 2.43 [dB], and 4.15 [dB] compared to each existing method, respectively. In the Goldhill image, the noise was 31.95
AWGN [σ] Barbara image [dB] AF EDWF FLBF PFA 5 25.16 27.00 25.10 30.32 10 24.98 26.64 24.92 29.07 15 24.69 26.00 24.61 27.80 20 24.35 25.00 24.24 26.57 25 23.91 23.50 23.79 25.38
Table 3. PSNR comparison of Goldhill image AWGN [σ] Goldhill image [dB] AF EDWF FLBF PFA 5 30.84 31.96 31.01 33.57 10 30.21 31.03 30.25 31.95 15 29.36 29.62 29.28 30.26 20 28.35 27.54 28.20 28.56 25 27.40 25.22 27.20 27.12
Fig. 5. Test image: (a) boat image, (b) noisy boat image, (c) barbara image, (d) noisy barbara image, (e) goldhill image, (f) noisy goldhill image.
values. The final output was obtained by adding or subtract-ing the output of the space weight filter and estimation.
The simulation results demonstrated that the proposed algorithm showed excellent performance, and the compari-son results of the differential image and PSNR verified its superior characteristics.
The proposed algorithm is expected to be implemented effectively in areas that require precise noise removal.
REFERENCES
[ 1 ] T. K. Kim, I. H. Song, and S. H. Lee, “Noise reduction of HDR detail layer using a Kalman filter adapted to local image activity,” Journal of Korea Multimedia Society, vol. 22, no. 1, pp. 10-17, Jan. 2019. DOI: 10.9717/kmms.2019.22.1.010.
[ 2 ] P. S. V. S. Sridhar and R. Caytiles, “Efficient cloud data hosting availability,” Asia-pacific Journal of Convergent Research Interchange, HSST, ISSN : 2508-9080, vol. 3, no. 2, pp. 11-19, Jun. 2017. DOI: 10.21742/APJCRI.2017.06.02.
[ 3 ] S. Y. Kim, S. H. Yu, and J. C. Jeong, “Design and analysis of an image restoration using Wiener filter with a quality based hybrid algorithms,” in Conference on The Institute of Electronics and Information Engineers, Incheon : Korea, pp. 430-433, 2018. [ 4 ] G. Thanakumar, S. Murugappriya, and G. R. Suresh, “High density
impulse noise removal using BDND filtering algorithm,” in 2014 International Conference on Communication and Signal Processing, Melmaruvathur : India, pp. 1958-1962, 2014.
[ 5 ] K. Chithra and T. Santhanam, “Hybrid denoising technique for suppressing Gaussian noise in medical images,” in 2017 IEEE Inter-national Conference on Power, Control, Signals and Instrumentation Engineering (ICPCSI), Chennai : India, pp. 1460-1463, 2017. DOI: 10.1109/ICPCSI.2017.8391954.
[ 6 ] S. Y. Kim, S. H. Yu, and J. C. Jeong, “A Wiener filter using edge detection for Gaussian noise reduction,” in Conference on The Institute of Electronics and Information Engineers, Incheon : Korea, pp. 430-433, 2018.
[ 7 ] M. Chowdhury, J. Gao, and R. Islam, “Fuzzy logic based filtering for image de-noising,” in 2016 IEEE International Conference on Fuzzy Systems, Vancouver, BC : Canada, pp. 2372-2376, 2016. DOI: 10. 1109/FUZZ-IEEE.2016.7737990.
[ 8 ] S. I. Jabbar, C. R. Day, and E. K. Chadwick, “Using fuzzy inference system for detection the edges of musculoskeletal ultrasound images,” in 2019 IEEE International Conference on Fuzzy Systems, New Orleans, LA : USA, pp. 1-7, 2019. DOI: 10.1109/FUZZ-IEEE. 2019.8858971.
[ 9 ] R. C. Buenoa, P. H. F. Masottib, J. F. Justoc, D. A. Andradeb, M. S.
[12] J. M. Mendel, H. Hagras, H. Bustince, and F. Herrera, “Comments on interval Type-2 fuzzy sets are generalization of interval-valued fuzzy sets: towards a wide view on their relationship,” Journal of the IEEE Transactions on Fuzzy Systems, vol. 24, no. 1, pp. 249-250, Feb. 2016. DOI: 10.1109/TFUZZ.2015.2446508.
[13] N. L. S. B. Albashah, S. C. Dass, V. S. Asirvadam, and F. Meriaudeau, “Segmentation of blood clot MRI images using intuitionistic fuzzy set theory,” in 2018 IEEE-EMBS Conference on Biomedical Engineering and Sciences (IECBES), Sarawak : Malaysia, pp. 533-538, 2018. DOI: 10.1109/IECBES.2018.8626678.
[14] A. D. Belsare, M. M. Mushrif, and M. A. Pangarkar, “Breast epithelial duct region segmentation using intuitionistic fuzzy based multi-texture image map,” in 2017 14th IEEE India Council Inter-national Conference (INDICON), Roorkee : India, pp. 1-6, 2017. [15] S. Zhang, Z. Wang, D. Ding, H. Dong, F. E. Alsaadi, and T. Hayat,
“Nonfragile H∞ fuzzy filtering with randomly occurring gain variations and channel fadings,” IEEE Transactions on Fuzzy Systems, vol. 24, no. 3, pp. 505-518, Jun. 2016. DOI: 10.1109/TFUZZ. 2015.2446509.
[16] P. Shi, Y. Zhang, M. Chadli, and R. K. Agarwal, “Mixed H-infinity and passive filtering for discrete fuzzy neural networks with stochastic jumps and time delays,” IEEE Transactions on Neural Networks and Learning Systems, vol. 27, no. 4, pp. 903-909, Apr. 2016. DOI: 10.1109/TNNLS.2015.2425962.
[17] S. K. Nguang and W. Assawinchaichote, “H∞ filtering for fuzzy dynamical systems with D stability constraints,” IEEE Transactions on Circuits and Systems I Fundamental Theory and Applications, vol. 50, no. 11, pp. 1503-1508, Nov. 2003. DOI: 10.1109/TCSI. 2003.818624.
[18] M. Wang, J. Qui, and G. Feng, “A novel piecewise affine filtering design for T–S fuzzy affine systems using past output measurements,” IEEE Transactions on Cybernetics, vol. 50, no. 4, pp. 1509-1518, Apr. 2020. DOI: 10.1109/TCYB.2018.2883476.
[19] P. Yiarayong, “On fuzzy quasi-prime ideals in near left almost rings,” Songklanakarin Journal of Science and Technology, vol. 41, no. 2, pp. 471-482, Apr. 2019. DOI: 10.14456/sjst-psu.2019.59. [20] F. Pasila, “Credit scoring modeling of indonesian micro, small and
medium enterprises using Neuro-fuzzy algorithm,” in 2019 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), New Orleans, LA : USA, pp. 1-6, 2019. DOI: 10.1109/FUZZ-IEEE.2019. 8858841.
[21] S. G. Kim and J. H. Yoon, “Fuzzy linear regression using Gaussian fuzzy numbers,” Journal of Korean Institute of Intelligent Systems, vol. 30, no. 5, pp. 386-390, Oct. 2020. DOI: 10.5391/JKIIS.2020.30. 5.386.
[22] J. Zhang, Z. Deng, K. S. Choi, and S. Wang, “Data-driven elastic fuzzy logic system modeling: constructing a concise system with human-like inference mechanism,” IEEE Transactions on Fuzzy Systems, vol. 26, no. 4, pp. 2160-2173, Aug. 2018. DOI: 10.1109/
TFUZZ.2017.2767025.
[23] K. Sato and H. Sato, “Structure preserving H2 optimal model reduction based on Riemannian trust-region method,” Journal of
IEEE Transactions on Automatic Control, vol. 63, no. 2, pp. 505-512, Feb. 2018. DOI: 10.1109/TAC.2017.2723259.
Bong-Won Cheon
received B.S., and M.S. degrees in Control and Instrumentation Engineering form Pukyong National University, Korea, in 2018 and 2020, respectively. He is currently pursuing a Ph.D. at Pukyong National University. His major research interests include digital signal processing and high-frequency measurement.
Nam-Ho Kim
received B.S., M.S., and Ph.D. degrees in electronics engineering from Yeungnam University, Korea in 1984, 1986, and 1991, respectively. Since 1992, he has been with Pukyong National University (PKNU), Korea, where he is currently a professor in the Dept. of Control and Instrumentation Eng. From 2004 to 2006, he was Vice Dean of the College of Engineering, PKNU. His research interests include circuits and systems, high-frequency measurement, sensor systems, image and signal processing with wavelet and adaptive filters, and communications theory.