Copyright
Ⓒ2009 KSAE 1225-6382/2009/097- 01 Transactions of KSAE, Vol. 17, No. 1, pp.1-11 (2009)
에지 분석과 에이다부스트 알고리즘을 이용한 차량검출
송 광 열․이 기 용․이 준 웅*
전남대학교 산업공학과 자동차 연구소
Vehicle Detection Using Edge Analysis and AdaBoost Algorithm
Gwangyul Song․Kiyong Lee․Joonwoong Lee*
Department of Industrial Engineering, Automobile Research Center, Chonnam National University, GwangJu 500-757, Korea
(Received 5 October 2007 / Accepted 8 September 2008)
Abstract : This paper proposes an algorithm capable of detecting vehicles in front or in rear using a monocular camera installed in a vehicle. The vehicle detection has been regarded as an important part of intelligent vehicle technologies.
The proposed algorithm is mainly composed of two parts: 1)hypothesis generation of vehicles, and 2)hypothesis verification. The hypotheses of vehicles are generated by the analysis of vertical and horizontal edges and the detection of symmetry axis. The hypothesis verification, which determines vehicles among hypotheses, is done by the AdaBoost algorithm. The proposed algorithm is proven to be effective through experiments performed on various images captured on the roads.
Key words : Vehicle detection(차량 검출), Edge analysis(에지 분석), AdaBoost algorithm(에이다부스트 알고리즘), Hypothesis generation(가설 형성), Hypothesis verification(가설 검증)
1.
서 론1)최근, 운전자의 부주의나 실수로 일어날 수 있는 사고를 예측하여 사고를 미연에 방지하거나 사고피 해를 경감시켜 운전자를 보호하는 지능형 자동차에 대한 연구가 활발하다. 머신비젼은 차량에 장착한 카메라를 이용하여 자차량 근방의 차량을 검출하여 추돌 가능성이 있는 차량을 운전자에게 미리 알려 주거나, 추돌에 대비하는 시스템으로 활용된다. 따 라서 머신비젼은 도로상의 자연환경에서 다양한 차 종을 검출할 수 있어야 한다. 본 논문은 차량에 장착 된 단안 카메라를 이용하여 자차량 근방의 차량을 검출하는 알고리즘을 제시한다.
머신비젼 기반의 차량 검출 알고리즘은 일반적으
*
Corresponding author, E-mail: [email protected]
로 2단계로 구성된다. 첫 단계는 “가설의 형성 (Hypothesis generation)” 단계로서 영상에서 차량이 존재할 것으로 기대되는 영역을 추출하는 것이다.
둘째 단계는 “가설의 검증 (Hypothesis verification)”
단계로서 첫 단계에서 추출된 영역을 대상으로 이 영역이 실제 차량일지를 검증하는 것이다.
가설의 형성 단계는 다음과 같은 세 가지 방법이 있다. 1) 지식기반 방법, 2) 스테레오기반방법, 3) 모 션기반 방법이 그들이다.1)
지식기반 방법은 차량이 가지고 있는 모양이나 색 등을 이용하여 영상에서 차량일 가능성이 있는 영역을 추출하는 방법으로 그림자(Shadow), 에지 (Edge), 엔트로피(Entropy), 대칭축(Symmetry) 등이 이용된다.2-8)이 방법은 차량 검출에 효과적이지만, 실시간 검출시 설정된 임계값에 따라 검출이 실패
송광열․이기용․이준웅
하는 경우도 존재한다.
스테레오기반 방법은 기본적으로 두 대의 카메라 를 이용하여 한 쌍의 영상을 획득하고, 이 두 영상으 로부터 3차원 복원을 함으로써 차량 또는 주행 가능 도로를 분리한다.9,10)
모션기반 방법은 연속된 영상에서 광류(Opti- cal-flow)를 추출하여 차량을 검출하는 방법이다. 이 방법은 많은 연산량이 필요하기 때문에 실시간 차 량 검출에 어려운 점이 있다. 또한 움직임을 이용하 여 차량을 검출하기 때문에 움직임이 없거나 멀리 있는 차량은 검출하기 어려운 점이 있다.11)
형성된 가설이 차량인지의 여부를 검증하는 방법 은 다음과 같이 크게 두 가지로 나눌 수 있다. 1) 템 플레이트기반(Template-based)방법, 2) 외관기반 (Appearance-based)방법이 그들이다.1)
템플레이트기반 방법은 미리 정해놓은 차량의 템 플릿으로 차량과 비차량을 판별한다. Betke 등은12) 변형되는 차량 템플릿영상을 이용하여 차량을 판별 하였고, Ferryma 등은13) 주성분 분석(Principal com- ponent analysis)을 이용하여 차량의 변형되는 모델 을 만들어 차량을 판별하였다.
외관기반 방법은 다양하게 차량과 비차량의 영 상을 준비하여 학습시킨 후 학습된 결과를 이용하 여 차량을 판별하는 방법이다. 이 때, 학습은 신경 망과 같은 학습 분류기를 이용하거나 차량의 특징 을 확률분포로 모델링하는 방법이 있다. Goerick 등은14) LOC(Local orientation coding)을 이용하여 에지 정보를 추출하고, 관심 영역의 LOC 히스토 그램을 미리 학습된 신경망을 이용하여 차량과 비 차량을 판별하였다. 또 다른 논문에서는 Gabor filters15)와 웨이블릿 변환16)을 이용하여 차량을 판 별하였다.
본 논문의 차량 검출 알고리즘은 위와 같이 차량 의 후보영역 검출 부분과 후보 영역 중 차량의 유무 를 판별하는 부분으로 나뉜다. 차량의 후보 영역 검 출은 Sun 등이7) 했던 것처럼 수직/수평에지의 프로 파일을 누적하여 찾은 피크를 이용한다. 하지만 Sun 등의 방법은 영상의 전체 영역을 누적하기 때문에 원거리의 차량의 에지는 노이즈가 섞여 차량후보에 서 제외될 가능성이 높다. 하지만 본 논문에서는 역
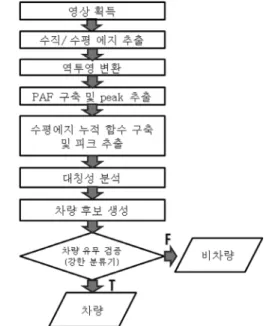
투영 변환18)을 이용하여 수직 에지 검출을 하고, 검 출된 수직에지를 기반으로 수평에지를 분석함으로 써 차량이 원거리에 존재하여 영상에서 차량이 차 지하는 영역이 작더라도 검출이 가능하다. 그리고 후보영역 중 차량의 유무 판정은 얼굴인식에 쓰인 Paul Viola17)의 에이다 부스트 알고리즘(AdaBoost algorithm)을 이용한다. 이 알고리즘을 사용한 이유 는 Paul Viola17)가 밝혔듯이 신경망 또는 SVM (Sup- port vector machine)을 이용한 연구보다 약 15배나 빠른 연산속도를 보이고 있으며, 높은 정확도를 가 지고 있기 때문이다. 아래의 Fig. 1은 알고리즘의 전 체적인 흐름도이다.
본 논문의 구성은 다음 같다. 2절은 차량후보검 출에 대해 소개한다. 3절은 검출된 차량후보로부 터 차량을 결정하는 내용을 기술한다. 4절은 여러 가지 상황에서 차량을 검출하는 실험결과를 보이 고 마지막으로 5절은 제안된 알고리즘에 대해 결 론이다.
Fig. 1 Overview of vehicle detection method
2.
차량후보 검출(Hypothesis generation)2.1
수직 에지 분석차량의 경계를 표현하는 수직 에지 검출은 Lee 등 이18) 제안한 역투영 변환을 이용한다. Fig. 2(b)는 카
에지 분석과 에이다부스트 알고리즘을 이용한 차량검출
(a) Original image (b) Inverse perspective transformed image
Fig. 2 Inverse perspective transformation메라와 노면사이의 기하학적인 관계를 이용하여 Fig. 2(a)의 원영상을 역투영 변환시킨 영상이다. 역 투영 변환 영상에서 장애물의 수직성분의 에지는 Fig. 2(b)에 보인 바와 같이 원영상의 수직 에지보다 훨씬 길게 늘어난다. 바로 이 현상을 이용하기 위해 본 논문에서 역투영변환을 한 것이다.
역투영 변환된 영상으로부터 차량의 수직 경계 로 가정할 수 있는 위치를 검출하기 위해 먼저 변 환된 영상으로부터 Fig. 3(a)에 보인 바와 같이 수 직에지를 추출한다. 그리고 Fig. 3(b)에 보인 바와 같이 카메라 원점 C를 기준으로 원주방향으로 일 정하게 각도를 변화시키면서 정의된 스캔라인 (Scanline)을 따라 에지픽셀들의 크기(Norm)의 합 을 구하면 Fig. 3(c)와 같은 함수를 얻게 된다. 이 함
(a) Vertical edges (b) Vertical edges and a scanline
(c) Polar accumulation function (PAF)
Fig. 3 PAF and peak detectionFig. 4 Candidates of vehicle's vertical boundaries
수를 PAF(Polor accumulation function)라 한다.18) PAF에서 이웃하는 값들보다 큰 위치를 피크(Peak) 라고 정의하고, 피크를 추출하여 차량의 경계를 나 타내는 위치를 찾는다.
PAF에서 추출된 피크는 PAF 구축시 정의된 스캔 라인(Scanline)과 역투영 영상의 수평인 x축이 만나 는 점을 얻고, 이 점을 원영상의 좌표로 변환함으로 써 Fig. 4에 보인 수직선들을 얻는다. 이 수직선들이 차량의 수직 경계로 고려된다.
2.2
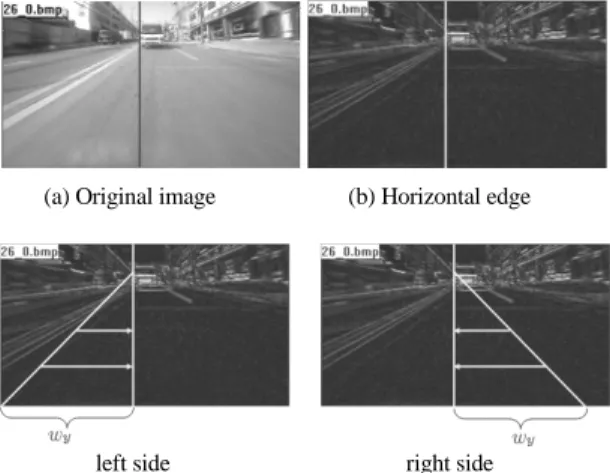
수평 에지 분석차량과 노면이 접하는 부분은 수평에지 성분을 이용하여 검출한다. Fig. 5는 Fig. 4에서 수평에지의 크기(Norm)를 추출한 것이다. 가운데 사각형으로 표시한 부분은 차량이 존재하는 영역으로 차량과 노면이 접하는 부분에서 수평에지가 나타나는 것을 볼 수 있다. 따라서 차량과 노면이 접하는 경계를 찾 기 위해서 각 행별로 수평에지의 크기를 누적하여 피크(Peak)를 찾는다.
Fig. 6(a)에 표시한 수직선은 Fig. 4에서 검출된 차 량의 수직 경계 후보로 실제 차량의 수직경계와 일 치하는 경우이다. Fig. 6(b)는 이 수직 경계를 기준으
Fig. 5 Horizontal edges of Fig. 4
Gwangyul Song․Kiyong Lee․Joonwoong Lee
(a) Original image (b) Horizontal edge
left side right side (c) Accumulation range of horizontal edge
left side right side (d) Horizontal accumulation function
left side right side (e) Horizontal part of vehicle
(f) Candidates of horizontal vehicle boundaries
Fig. 6 Horizontal part detection procedure로 수평에지를 누적하기 위해서 소벨 연산자(Sobel operator)를 이용하여 밝기차가 존재하는 수평에지 (크기:
)를 추출한 영상이다.Fig. 6(b)에 보인 차량의 수평경계를 추출하기 위 해서 각 행(Row)별로 수평에지의 크기를 누적한다.
이때 검출된 수직 경계에서 좌측 또는 우측에 차량 이 존재할 수 있으므로 Fig. 6(c)와 같이 수직경계의 좌측과 우측을 모두 고려한다. 누적시에는 노이즈
의 영향을 줄이기 위해 Fig. 6(c)와 같이 이미 검출된 차량의 수직경계 부분과 영상의 행(Row)별 차량 폭 의 절반(
;약 0.8m에 해당하는 폭) 정도로 이루어 진 삼각형 안에서 누적을 취한다. 그 후 식 (1)과 같 이 평준화(Normalization)를 하기 위해서 고려한 폭 (
)으로 나누어주면 Fig. 6(d)에 프러파일로 나타낸 바와 같은 수평에지 누적함수가 얻어진다. 이 누적 함수의 평균(
)과 표준편차(
)를 이용하여 최소한 의 노이즈를 제거한 후 피크를 추출하여 피크의 위 치를 차량의 수평경계로 고려한다.
∈
(1) Fig. 6(e)는 검출된 차량의 수평 경계 후보를 검출 된 수직 경계에서부터 차량 폭의 절반만큼의 길이 (
)로 표시한 것이다. 그리고 Fig. 6(f)는 Fig. 4의 모 든 수직경계후보에 대해 위와 같은 과정을 거쳐 검 출된 차량의 수평경계 후보를 표시한 것이다.2.3
차량 후보 영역 결정후보 영역을 검출하기 위해서는 차량의 좌우경계 가 필요하다. 따라서 수직 에지 분석 단계에서 검출 한 차량의 수직경계와 짝이 되는 수직 경계가 필요 하다. 보통 차량이 정면에서 보이는 경우는 차량의 좌우 경계에서 수직 에지 성분이 잘 나타나 차량의 좌우 경계가 잘 검출된다. 하지만 Fig. 7과 같이 차량 의 측면이 같이 보이는 경우 차량의 수직 에지 성분 이 줄어들어 수직 경계 검출이 어렵다. 이러한 문제 를 해결하기 위해서 “차량의 중심부를 기준으로 차 량의 좌우는 비슷한 형태를 갖는다.”라는 성질인 대 칭성을 이용하여 차량의 경계를 검출한다.
Fig. 7 A detection problem of vertical edge
2.3.1
띠의 선택차량의 전면이나 후면은 좌우대칭의 구조를 가지
Vehicle Detection Using Edge Analysis and AdaBoost Algorithm
Fig. 8 Evaluation region
고 있다. 하지만 영상에서 밝기 분포는 글라스 재질 의 경면성 때문에 자주 대칭 불균형이 발생한다. 따 라서 대칭성 검사 전에 대칭성을 보다 뚜렷하게 나 타내기 위한 방법으로 Fig. 8과 같이 소실점 높이 (R2)에서부터 차량의 수평 경계 후보(R1) 행까지 폭 ( )을 선택하여 식 (2)와 같이 누적을 취한다.
∈
⋯
(2) 여기서
는
좌표에 있는 픽셀의 값을 나 타내고, col는 영상의 가로 크기이다.2.3.2
대칭성 분석대칭축 검사는 “어떤 함수
는 우함수
와 기함수
의 합으로 표현되고, 우함수가 축대 칭성을 나타낸다.”고 하는 논리를 바탕으로 Zielke8) 등이 제안한 대칭성 척도를 이용한다. 이를 위해 다 음과 같은 식 (3)으로 나타낼 수 있다.
∈
∈
(3) 여기서
는
로 원점 이동된 함수가 정의 되는 구간으로 캘리브레이션에 의해서 계산된 차폭 (
)이다. 그리고
는 대칭성을 탐색하는 위 치로 식 (4), (5)와 같이 검출된 수직 경계의 위치(
) 에서 차폭의 절반 만큼(
)떨어진 영역으로, 차량의 피치운동에 의해 생기는 차량폭의 계산 오차와 차 종마다 차폭이 다르므로 차폭에 비례하는 여유폭 (
∈
)을 넣어준다. 식 (4)는 수직 경계의 오른쪽에 수평 경계 후보가 있을 때의 구간이고, 식(5)는 수직경계의 왼쪽에 수평 경계 후보가 있을 때 의 구간이다.
≤
≤
(4)
≤
≤
(5) 대칭성 평가를 위해 식 (6)과 같은 대칭성 척도를 사용한다.
(6)
≤
≤
Fig. 9 Intensity profile(
) and symmetry profile(
)Fig. 9의
는 차량의 수평 경계후보(R1)에서 누적한 밝기값이고,
는 검출된 수직에지의 오른쪽에서 대칭성 검사를 하기 때문에 식 (4)의 구 간에서 대칭성을 계산하여 표시 것이다. 여기서
의 값이 1에 가까우면 그만큼 대칭성이 크 다. 하지만 값이 -1에 가까우면 대칭성이 낮다. 따라 서 Fig. 8과 같이
의 값이 0이상의 가장 큰 값인
의 위치를 대칭축으로 정한다.2.3.3
후보 영역 설정차량 유무 검증을 위한 후보 영역의 폭과 높이 설 정은 다음과 같이 한다. 후보 영역의 폭(
)은 수직 에지 분석 단계에서 검출된 차량의 수직 에지 후보송광열․이기용․이준웅
(
)와 검출된 대칭축(
)을 이용하여 계산 한다.
(7)후보 영역의 높이(
) 설정은 후보영역의 폭과 비 례하게 설정한다. 본 논문에서는 승용차뿐만 아니 라 트럭과 같은 대형차를 고려하기 위해서 폭과 같 은 비율(
)이 되도록 설정하여 계산한다.
(8)후보영역으로 검출된 결과는 Fig. 10과 같다. 그 림에서 점선으로 표시된 부분은 검출된 대칭축이 고, 사각형으로 표시된 영역은 차량의 후보영역으 로 검출된 결과이다.
Fig. 10 Hypothesis generation
3.
차량 유무 검증(Hypothesis verification) Fig. 10에서와 같이 검출된 차량의 후보 중에는 차량이 아닌 영역도 포함된다. 따라서 본 논문에서 는 이러한 검출에러를 해결하기 위해 Paul Viola17)의 Haar-like 특징과 에이다부스트(AdaBoost) 알고리즘 을 이용한다.3.1 Haar-like 특징
기본적으로 Haar-like 특징은 Fig. 11에 보인 바와 같이 에지, 라인, 대각선의 세 가지다. 이 기본의 Haar-like 특징은 검출 윈도우(Search window)에서 흰 사각형과 검은 사각형의 픽셀 수의 비율을 유지 하면서 위치 이동과 크기 확장을 통하여 많은 수의 특징 값을 만들어 낸다. 본 논문에서는 검출 윈도우 의 크기를 24(pixel)
×
24(pixel)로 하며, 이 때 생성된 특징의 전체의 수는 162336개이고, 이를 기본 특징 별로 분류할 경우의 수는 Table 1과 같다. Haar-likeFig. 11 A set of Haar-like features
Table 1 Number of Haar-like features
Feature type Number of features
a), b) 43200
c), d) 27600
e) 20736
Total 162336
특징의 값은 식 (9)과 같이 검은 영역과 흰 영역에 속 한 픽셀들의 밝기차이다. 식 (9)의
는
좌표의 밝기값이다.
∈
∈
(9)
3.2
에이다부스트 알고리즘부스트란 도출해 내기 쉬운 선택 기준들 (약한 분 류기(Weak classifier)라 함)을 합하여 정확도가 높은 선택 기준(강한 분류기(Strong classifier)라 함)을 만 들어 주는 작업이다. 에이다 부스트 알고리즘은 이 러한 부스트 알고리즘의 한 종류로 다른 부스트 알 고리즘보다 간단하면서도 효과적인 알고리즘이다.
에이다 부스트 알고리즘의 약한분류기는 식 (10) 과 같다. 식 (10)에서
는 Haar-like 특징의 번호,
는 검출된 특징 값,
는 임계값,
는 식의 우 변이 좌변보다 크기 위한 부호로 -1 또는 1 값을 의 미한다.
⋯
(10)
에지 분석과 에이다부스트 알고리즘을 이용한 차량검출
Fig. 12 Computing of feature value
Fig. 13 Threshold value
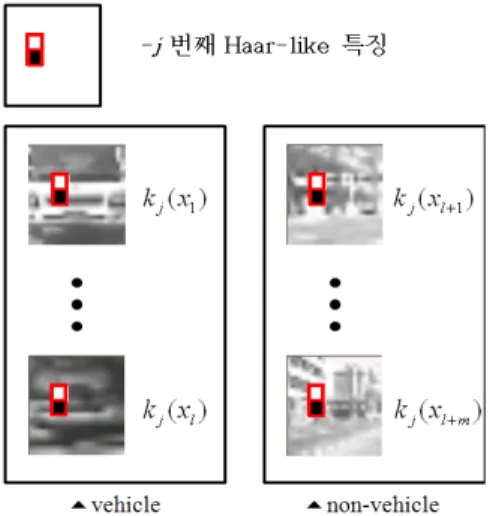
임계값
는 Fig. 12와 같이 학습 데이터 (
⋯
는 차량,
⋯
는 비차량) 가 있을 때, Haar-like 특징에 대한 값을 계산한 후 Fig. 13과 같이 가우시안 분포로 가정한 후 계산한다.식 (10)에서 알 수 있듯이 약한 분류기는 차량의 특징을 나타내 주는 Haar-like 특징에 의해서 생성된 다. 따라서 약한분류기는 특징의 전체의 수인 162,336개가 생성되고, 이렇게 생성된 약한분류기 는 에이다 부스트 알고리즘에 의해서 차량과 비차 량을 잘 구분할 수 있는 것들이 선택되어 강한분류 기를 이루게 된다.
에이다 부스트 알고리즘에 의해서 만들어지는 강 한 분류기는 식 (11)과 같다. 식 (11)에서
은 약 한 분류기,
는 약한 분류기의 가중치로 에이다 부 스트 알고리즘에 의해서 결정된다. 그리고 T는 선택 된 약한 분류기의 개수로 강한 분류기에 의해 분류 된 학습데이터의 오분류율(False alarm rate)에 의해 결정된다.
≥
(11)
3.3
학습 데이터 생성에이다부스트 알고리즘의 학습 데이터는 검출 된 차량의 후보영역을 이용하여 생성한다. Fig. 14 는 학습 데이터의 생성 과정을 나타낸 그림으로, 후보 영역으로 검출된 결과를 이용하여 사람이 직 접 차량과 비차량을 분리 후 검출 윈도우의 크기인 24
×
24(pixel)크기로 정규화하여 학습데이터를 생 성한다.Fig. 14 Subimages for training
(a) Vehicle (b) Non-vehicle
Fig. 15 Training dataFig. 15는 차량 유무 판별을 위한 식 (12)의 분류 기 생성시에 사용될 학습데이터의 예를 나타낸 그 림이다. 현재 실험에서는 학습데이터의 개수를 차 량 1100개, 비차량 1500개로 전체 2600개를 이용하 였다.
Fig. 16(a)는 식 (12)의 강한분류기를 이루는 약한 분류기의 개수(T)에 따른 학습데이터의 오분류율을 그래프로 나타낸 것이다. 이 데이터에 의해 약한 분 류기는 약 150개를 선택하였다. 그리고 Fig. 16(b)는 선택된 약한분류기의 Haar-like 특징 150개중 상위 60개를 표시한 것이다.
Gwangyul Song․Kiyong Lee․Joonwoong Lee
(a) Flase alarm rate
(b) Selected Haar-like feature
Fig. 16 Adaboost algorithm training4.
실험 및 결과 고찰4.1
차량 검출 알고리즘 평가서론에서 밝힌 바와 같이 차량 검출 알고리즘은 Sun이7)했던 것처럼 수직/수평에지을 누적하여 찾 은 피크를 이용하여 차량의 후보를 검출한다. 하지 만 Fig. 17에서 보는 바와 같이 Sun의 방법은 영상의 전체 영역을 누적하기 때문에 영상의 중앙에 있는 원거리 차량에 대한 피크가 나오지 않았다. 하지만 본 논문에서 제안된 알고리즘에 의해서는 차량의 수직 경계에 해당하는 피크와 수직경계후보
열을 기준으로 누적한 수평에지 누적함수에서 피크가 확 실히 나타나는 것을 볼 수 있다.알고리즘 평가는 Fig. 18과 같이 사람이 검출한 결과와 알고리즘에 의해 검출된 결과를 비교한 결 과를 이용한다. Fig. 18에서 A는 실제 사람이 검출한 결과이고, B는 알고리즘에 의해서 검출된 결과이 다. 이때 검출 성공은 식(12)와 같이 A영역과 B영역 의 면적의 합과 A영역과 B영역이 겹치는 C영역의 면적을 2배한 것의 비가 80%이상일 때로 한다.
×
×
(12)여기서
∩
이다.Table 2는 위의 평가 방법에 의해 주간 또는 야간
(a) Sun's method
(a) Proposed method
Fig. 17 Result of Sun's method and proposed method
Fig. 18 Performance check method
Table 2 Performance of proposed algorithm
True positive rate False positive rate
Day time 77.9 % 8.3 %
Night time 70.3 % 9.8 %
의 시내 도로에서 얻은 1000장의 영상에서 실험한 결과를 나타낸 것이다.
위의 실험 결과에서 주간과 야간의 인식률이 크 게 차이가 나지 않았는데, 이것은 도로 주변의 가로 등과 카메라의 오토아이리스 기능에 의한 것으로 주간과 야간의 차량검출 조건이 크지 다르지 않았 기 때문이다. 야간의 실험 결과는 Fig. 19와 같다.
Fig. 19(a)는 알고리즘에 의해 찾아진 수직 경계 후 보들과 수직 경계 후보인
열을 기준으로 좌측의 수 평에지를 누적한 결과를 보여주고 있다. 그리고 Fig.19(b)는 최종적으로 검출된 차량들을 보여주는 그 림이다.
Vehicle Detection Using Edge Analysis and AdaBoost Algorithm
(a) Hypothesis generation
(b) Hypothesis verification
Fig. 19 Result of proposed method at night주로 검출에 실패한 경우는 차량과 주변 환경의 밝기차가 확실하지 않아서 에지를 누적하여도 차량 의 경계에서 피크가 생기지 않는 경우이다. Fig. 20 은 이러한 경우의 예로 수직 경계 후보인
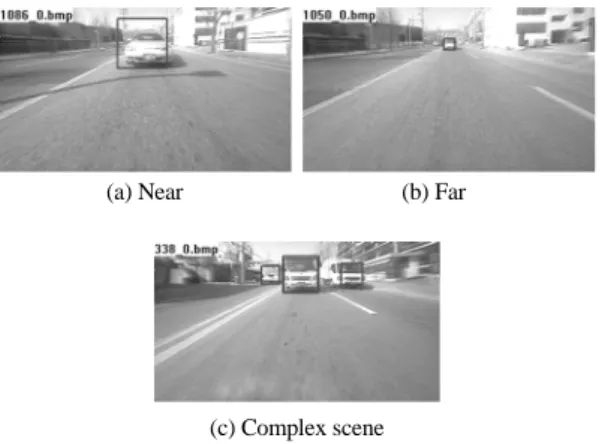
열을 기 준으로 수평에지를 누적하였지만 차량의 그림자가 길게 늘어나면서 노면과 차량의 밝기차가 확실하지 않아 차량 하단부의 검출에 실패한 경우이다.Fig. 21, 22는 제안한 알고리즘에 의해서 검출된 결과이다. Fig. 21은 후방 주차시 이용하는 후방 카 메라로 광각의 어안렌즈에 의해 얻은 영상에서 나
Fig. 20 Example of false negative
(a) Near (b) Far
(c) Complex scene
Fig. 21 Vehicle detection using a rear view camera
(a) a night scene (b) a urban scene
(c) a highway scene (d) a snow scene
Fig. 22 Vehicle detection using a front view camera온 차량 검출결과이다. 검출 결과에서 볼 수 있듯이 근거리 차량뿐만 아니라 원거리에 위치하여 영상에 서 차량이 차지하는 영역이 작더라도 검출되었다.
그리고 Fig. 22는 차량의 전방에 장착한 카메라에서 얻은 영상에서 나온 차량 검출 결과이다. 이 실험에 사용한 영상의 크기는 320
×
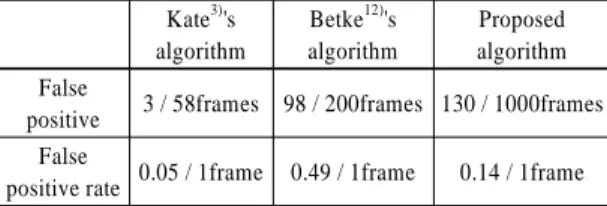
240으로 Pentium4 3.0GHz 컴퓨터에서 약 11fps를 처리하였다.제안된 알고리즘을 차량 검출 결과가 나타나 있 는 논문인 Kate3)와 Betke12)의 알고리즘과 비교하였 을 때의 결과는 Table 3과 같다. 비교 결과는 Kate의 알고리즘이 차량 검출시 오경보율이 가장 적었다.
하지만 Kate의 논문에서 테스트한 영상은 건물과 같은 인공 구조물이 적어 오경보를 일으킬 가능성 이 적은 고속도로에서 획득한 영상이고, 테스트시
송광열․이기용․이준웅
Table 3 Comparison with other algorithms Kate3)'s
algorithm
Betke12)'s algorithm
Proposed algorithm False
positive 3 / 58frames 98 / 200frames 130 / 1000frames False
positive rate 0.05 / 1frame 0.49 / 1frame 0.14 / 1frame
사용한 영상의 수도 적어서 정확한 비교가 불가능 하다. Betke의 알고리즘과 비교하였을 때 제안된 알 고리즘의 오경보율이 더 적었으며, 제안된 알고리 즘은 Fig. 22(a)에서 볼 수 있듯이 Betke의 알고리즘 에서 검출하지 못한 횡단 보도 상의 차량도 검출하 였다.
5.
결 론본 논문은 운전자의 안전을 향상시키기 위한 지 능형 자동차관련 기술의 한 부분으로 자차량 전후 방의 차량을 검출하는 알고리즘을 제안한 것이다.
제안된 알고리즘은 실험결과에서 보였듯이 차량의 크기 변화에 강인한 결과를 보였고, 처리시간도 초 당 11프레임을 처리하였다. 하지만 검출률이 약 78%정도로 차량과 주변 환경의 밝기차가 크지 않은 경우 차량 검출이 실패하는 경우가 있다. 따라서 향 후 과제로 차량검출의 신뢰도를 향상시키기 위한 트랙킹 알고리즘과, 레이져 레이더등과 같은 센서 와 결합하는 방법을 연구를 할 것이다.
후 기
본 연구는 산업자원부가 시행하는 부품소재기술 개발사업인 VISS(영상기반 지능형 조향장치)를 개 발중인 ㈜만도 과제 ‘반자동 주차 모듈개발’의 위탁 과제로 진행되었습니다.
References
1) Z. Sun, G. Bebis and R. Miller, “On-road Vehicle Detection: A Review,” IEEE Trans.
Pattern Analysis and Machine Intelligence, Vol.28, No.5, pp.694-711, 2006.
2) N. Srinivasa, “A Vision-Based Vehicle Detec- tion and Traching Method for Forward Col-
lision Warning,” Proc. IEEE Intelligent Vehicle Symposium, pp.626-631, 2002.
3) T. K. Ten Kate, “Mid-range and Distant Vehicle Detection with a Mobile Camera,”
IEEE Intelligent Vehicles Symposium, pp.72-77, 2004.
4) A. Broggi, P. Cerri and P. C. Antonello,
“Mulit-Resolution Vehicle Detection using Artificial Vision,” IEEE Intelligent Vehicles Symposium, pp.310-314, 2004.
5) C. Tzomakas and W. V. Seelen, Vehicle Detection in Traffic Secenes Using Shadows, Internal Report 98-06, Institut fur Neuroinfor- matic, 1998.
6) A. Khammari, F. Nashashibi, Y. Abramson and C.Laurgeau, “Vehicle Detection Combining Gradient Analysis and AdaBoost Classifi- cation,” IEEE Intelligent Transportation Sys- tems, pp.66-71, 2005.
7) Z. Sun, R. Miller, G. Bebis and D. DiMeo, “A Real-Time Precreash Vehicle Detection System,”
Proc. IEEE Int'l Workshop Application of Computer Vision, 2002.
8) T. Zielke, M. Brauckmann and W. V. Seelen,
“Intensity and Edge-Based Symmetry Detec- tion with an Application to Car-Following,”
CVGIP: Image Understanding, Vol.58, No.2, pp.177-190, 1993.
9) S. Nedevschi, R. Schmidt, T. Graf, R. Danescu, D. Frentiu, T. Marita, F. Oniga and C. Pocol,
“High Accuracy Stereo Vision System for Far Distance Obstacle Detection,” IEEE Intelligent Vehicles Symposium, Parma, Italy, 2004.
10) M. Bertozzi and A. Broggi, “Gold: A Parallel Real-time Stereo Vision System for Generic Obstacle and Lane Detection,” IEEE Trans. on Image Processing, Vol.7, pp.62-81, 1998.
11) A. Giachetti, M. Campini and V. Torre, The Use of Optical Flow for Road Navigation, 1998.
12) M. Betke, E. Haritaglu and L. Davis, “Multiple Vehicle Detection and Tracking in Hard Real Time,” IEEE Intelligent Vehicles Symposium, pp.351-356, 1996.
13) J. Ferryman, A. Worrall, G. Sullivan and K.
에지 분석과 에이다부스트 알고리즘을 이용한 차량검출
Barker, “A Generic Deformable Model for Vehicle Recognition,” Proceedings of British Machine Vision Conference, pp.127-136, 1995.
14) C. Goerick, N. Detlev and M. Werner, “Artifi- cial Neural Networks in Real-time Car De- tection and Tracking Applications,” Pattern Recognition Letters, Vol.17, pp.335-343, 1996.
15) Z. Sun, G. Bebis and R. Miller, “On-road Vehicle Detection Using Gabor Filters and Support Vector Machines,” International Con- ference on Digital Signal Processing, Greece, 2002.
16) Z. Sun, G. Bebis and R. Miller, “Quantized
Wavelet Features and Support Vector Machines for On-road Vehicle Detection,” The 7th Inter- national Conference on Control, Automation, Robotics and Vision, Singapore, 2002.
17) P. Viola and M. Jones, “Rapid Object Detection Using a Boosted Cascade of Simple Features,”
Proceedings IEEE Conf. on Computer Vision and Pattern Recognition, 2001.
18) K. Y .Lee and J. W. Lee, “A Proceeding Vehicle Detection Using Dynamic Programming at Road Domain Based on Stereo Vision,” ITS Symposium, KSAE, pp.1-6, 2004.