http://dx.doi.org/10.7839/ksfc.2015.12.4.060
전자유압 비례밸브와 경사센서를 이용한 농용 프론트 로더 버켓 능동수평유지 시스템 개발
Development of a self-leveling system for the bucket of an agricultural front-end loader using an electro hydraulic
proportional valve and a tilt sensor
이창주
1․하종우
2․최덕수
3․김학진
1*Chang Joo Lee, Jong Woo Ha, Deok Su Choi and Hak Jin Kim
Received: 24 Sep. 2015, Accepted: 26 Nov. 2015
Key Words:Self_leveling system(수평제어 시스템), Tilt sensor(경사센서), Electro hydraulic control valve(유압제 어밸브), Front-end loader(프론트 로더), J1939, PID controller(PID 컨트롤러)
Abstract: A front-end loader (FEL) mounted on an agricultural tractor is one of the most commonly used implements for farm work. However, when the tractor carries material using the bucket attached to the FEL on a sloping ground, the materials can spill or roll back over the operator due to the tilted body, thereby requiring the bucket surface to remain level at a constant value regardless of varying slopes. In this study, an active system for controlling the angle of the FEL bucket on a tractor based on the real-time measurement of ground slopes was developed to enable the bucket to constantly remain level. A FEL simulator operated based on an electro hydraulic proportional valve (EHPV) was constructed in the laboratory to develop a proportional-integral-derivative (PID) controller forming a virtual electronic control unit (ECU) on the computer, which could automatically adjust the bucket angles depending on varying input angles while sending SAE-J1939 associated messages via CAN BUS to the EHPV. The different parameter values for the PID controller due to the gravity effect of the bucket were determined using a manual PID tuning method while assuming that the tractor travels on either an ascending slope or a descending slope. The developed PID control-based self-leveling system showed a mean of steady-state errors of within 1° and a mean of delayed times of ~ 0.8s when the step input of +20° was given, implying that the developed system and control algorithm would be effective in maintaining the bucket angle at a certain value. Future studies include the improvement of the control algorithm to reduce such a time delay as well as the application of the developed algorithm to the FEL mounted on a tractor tested at a testing ground.
* Corresponding author: [email protected]
1 Department of Biosystems Engineering, Seoul National University, Seoul 08826, Korea
2 KSF Co.,ltd. Ik-San si, Jeon-Bkuk, Korea
3 TAESUNG Co.,ltd. Yang-Ju si, Gyeonggi-do, Korea Copyright Ⓒ 2015, KSFC
This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License(http://
creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
기호 설명
: response angle signal, V
: output angle signal, V
: set horizontal bucket angle, deg.
: bucket angle variation, deg.
: flow rate of cylinder(head), l/min
: flow rate of cylinder(rod), l/min
: flow coefficient
: open area of valve, cm
2
: area of piston(head), cm
2
: area of piston(rod), cm
2
: supply pressure, kgf/cm
2
: hydraulic oil tank pressure, kgf/cm
2
: pressure of cylinder(head), kgf/cm
2
: pressure of cylinder(rod), kgf/cm
2
: force of cylinder(head), kgf
: force of cylinder(head), kgf
: density of hydraulic oil, g/cm
3
: bucket angle, deg.
: bucket angle(rising), deg.
: bucket angle(falling), deg.
: displacement of cylinder, mm
Subscripts
ECU : electronic control unit
: receive
: transmit
TECU : tractor electronic control unit
1. 서 론
농업생산에 사용되는 트랙터, 콤바인, 방제기 등의 농업기계는 대부분 평지에서 경운하거나 수확하면서 농약을 살포하는 반복작업을 중심으로 이루어지나 과수원과 밭작물 작업의 경우 대부분 경사지에서 이 루어진다. 경사지 작업 시 작업 효율은 상대적으로 떨어지며 장시간 작업 시 작업자의 위험부담이 높아 질 수 있다. 2013년 국내의 농업기계 안전사고 실태 조사결과에 의하면 100 대당 평균 농작업 사고 건수 는 2012년 기준 트랙터의 경우 0.54건, 경운기 0.69건 등이며 전체사고의 86.3%가 인적요인과 연관되어 있 다.
1)특히, 균평하지 않은 노면 또는 경사지 조건에 서 트랙터 전방에 장착된 프론트 로더를 이용하여 토사, 퇴비 등 무거운 적재물을 담고 움직일 경우 로 더에 의한 모멘트 변동에 의한 기체안정성이 떨어지 는 문제가 있을 뿐만 아니라 빈번한 트랙터 본체 상 하각도 변화에 의해 로더 버켓에 담겨져 있는 적재 물이 지상으로 쏟아질 위험이 존재한다. 따라서, 트 랙터 본체 각도변화에 따라 버켓각도를 변경하면서 적재물이 쏟아지지 않게 가변적으로 변경하여 작업 의 효율성과 작업자 안전성을 확보하는 기술이 필요 하다. 하지만, 관행 적인 버켓각도 조절은 작업자가 본체 각도의 변화를 감지하면서 유압레버를 이용하 여 유압공급량을 조절하는 방식이기 때문에 버켓각
도의 정밀 조정이 난해한 문제가 있다.
최근 IT 기술의 발달과 농업의 자동화, 생산성 향 상, 작업 안전성에 대한 요구로 전자 제어기술을 이 용한 농용 작업기 및 트랙터의 활용이 증가하고 있 다. 또한, 다양한 농작업 부속기를 효율적으로 작동 시키기 위해서는 트랙터와 작업기 간의 통신과 다양 한 작업기들 간 통신기술이 필요하다. 이러한 작업기 간에 효율적인 상호 통신에는 전자 제어 유닛(ECU, Electro Control Unit)을 이용 고유의 식별주소를 가지 면서 CAN 버스 네트워크를 통하여 제어가 가능한 통신 기술적용이 활발히 이루어지고 있다. 최근 농업 용 트랙터와 작업기들 간의 통신 및 제어를 관리하 기 위한 국제 표준 규격인 ISO11783가 유럽과 미국 을 중심으로 제안되고 있으며 관련 제품의 적용이 확대되고 있다.
2)이 표준은 미국 자동차공학회 SAE J1939 메시지 기반 프로토콜과 유사하지만, 농업용 장비에 필요한 작업기, 작업 관리, 가상 터미널 시스 템에 고유의 표준 식별주소를 할당하여 제조사와 상 관없이 트랙터, 콤바인 등 해당 부품 모듈간에 통신 이 가능하여 작동이 원활하게 이루어질 수 있도록 하였다.
이러한, 표준 통신 네트워크를 기반으로 ECU 기반 전자 트랙터가 개발보급 되고 있으며 작업 성능과 작업자의 조작 편이를 높이는 적용 연구가 활발히 진행되고 있다. Shao 등(2005)은 유압시스템의 자동 화를 위하여 퍼지제어와 PID제어를 이용해 유압시스 템의 비선형적 요소를 고려한 하이브리드 컨트롤러 를 개발하였다.
3)Ganesh Kothapalli 등 (2011)은 프론 트 로더의 위치제어 시 버켓의 하중 변화에 따라 달 라지는 오차를 Type-2 퍼지를 이용해서 무게보상 컨 트롤러를 연구하였다.
4)Nguyen 등 (2000)은 굴삭기 유압 시스템의 비선형 요소를 고려하여 버켓의 움직 임에 따른 붐대의 위치 오차 제거를 위한 슬라이딩 모드 제어기술을 개발하였다.
5)Lee 등 (2004)은 콤바 인 작업 시 습지 적응성 및 토양 침하로 인한 작업 성능저하를 해결하기 위하여 솔레노이드밸브를 이용 한 차체 수평제어 장치를 개발하였다.
6)Ha 등 (2015) 은 전자유압밸브의 램프시간 기능을 이용하여 붐대 의 충격 흡수 알고리즘 개발하였으며
7), 연구에서 개 발된 H/W 시스템을 본 연구에 그대로 적용하여 제 어기를 설계하였다.
본 연구의 최종 목적은 경사지에서 프론트 로더를
이용 적재물을 운반시 트랙터 본체의 경사각을 실시
간으로 감지하여 버켓각도를 능동적으로 변경하는
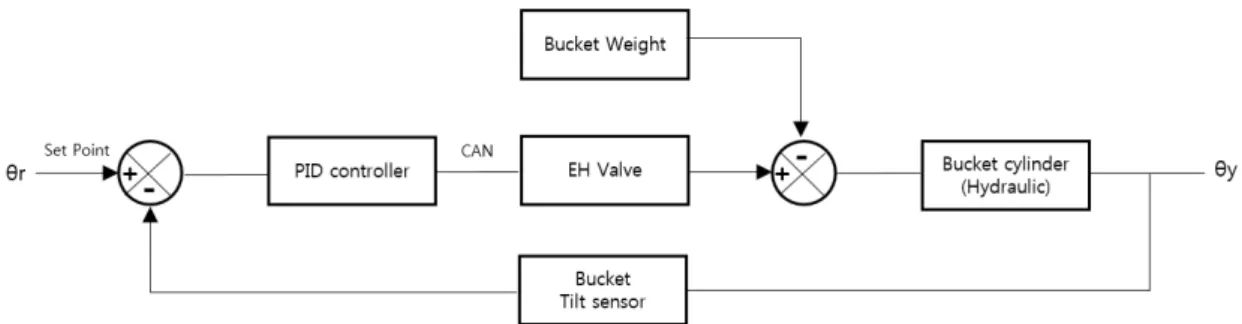
Fig. 2 Block diagram of the self_leveling system 제어 알고리즘을 개발하는 것이었으며 개발 알고리
즘은 ECU 기반 독립분산 제어방식의 전자 제어밸브 에 적용될 수 있도록 CAN 메시지로 구성된 유압제 어 플랫폼을 구성하고자 하였다. 본 연구에서는 개발 기술의 적용성을 높이기 위하여 종래의 컴퓨터 시뮬 레이션과 검증 기법을 이용하는 이론적 접근방식이 아닌 프론트 로더와 유압팩으로 구성된 유압시뮬레 이터를 실내에 설계·제작하여 다양한 제어 조건에 따 른 유압 압력과 로더 실린더의의 변위를 계측하면서 개발 알고리즘의 효용성을 실험적으로 검증하는 방 식을 이용하였다.
2. 버켓 각도 자동제어시스템 개념설계
트랙터의 주행 노면에 대한 차체의 각도 변화는 주로 불균일한 주행 노면, 경사면에서의 작업 등으로 인해 발생되며, 버켓을 수평으로 제어하기 위한 경사 각은 다음 식으로 나타낼 수 있다. Fig. 1은 경사면에 서의 수평제어 시스템을 위한 버켓 각도의 정의를 나타낸다.
Fig. 1 Conceptual design of Self_leveling system
(1)
여기서 Θ
set: 버켓의 수평설정 경사각 Θ
bucket: 버켓에 대한 변화 경사각
버켓이 항상 주행 노면에 대해 수평을 유지하기 위해서는 트랙터 차체의 경사각 변화분 만큼 버켓의 각도를 보상해야 한다. 이러한 원리를 기반으로 Fig.
2에 나타난 바와 같이 각도제어의 개념은 수평상태 의 버켓 초기 각도를 설정하고 경사각 변화에 의해 버켓의 각도가 변화가 되면 그 차이만큼은 제어기를 통하여 전기신호가 발생하고 해당 CAN 메시지 정보 를 전자 유압밸브에 전송되면서 유압실린더의 변위 가 바뀌면서 링크구조로 연결된 버켓의 각도를 변경 하는 개념이다. 자동제어에 사용된 PID 제어기의 매 개변수 값은 버켓 무게의 영향을 받을 수 있기 때문 에 Fig. 2와 같이 버켓 무게는 외란으로 간주될 수 있다. Fig. 3은 버켓실린더 움직임을 위한 스풀밸브와 연결된 버켓 각도 제어를 위한 유압시스템 회로 구 성을 나타낸다.
Fig. 3 Hydraulic circuit of the system
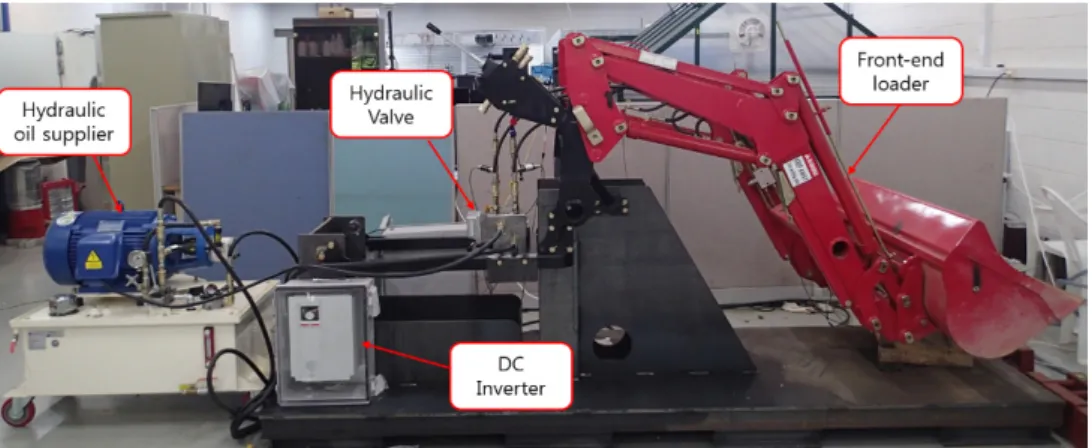
Fig. 5 Simulator of a front-end loader control system
7)복동 실린더(편 ROD형) 무부하 적용 상태일 때 밸
브내부를 통과하는 유량방정식은 다음의 식으로 나 타낼 수 있다.
(2)
(3)
여기서 Q
1은 실린더 헤드의 공급유량, C
d는 유량계 수, A
n는 스풀밸브의 개구면적, P
s는 공급압력 , P
1은 실린더 헤드의 압력,ρ는 작동유의 밀도이다. Q
2는 실 린더 로드의 유량, P
2는 실린더 로드의 압력, P
T는 유 압탱크의 압력을 나타낸다.
Fig. 4는 비례제어밸브의 스풀변위에 따른 개구면 적을 도해적으로 나타낸 것이다. 개구면적 A
n는 다음 과 같은 식으로 결정할 수 있다.
8)
cos
(4)
여기서 R은 개구면적의 반지름(mm), x는 스풀변위 량(mm)를 나타낸다.
Fig. 4 open area of EHPV
스풀밸브 이동에 의한 유량토출로 복동형 실린더 의 이동 변위는 다음의 식으로 결정될 수 있다.
×
×
(5)
×
×
(6)
여기서 L은 실린더 이동 변위(mm), t는 실린더 이 동 시간(sec)을 나타낸다.
버켓은 직선으로 움직이는 실린더와 힌지구조로 연결된 링크구조로 회전운동을 하면서 각도 변화가 발생한다. 3점 링크 구조로 연결되었기 때문에 실린 더 직선변위와 각은 선형적인 관계를 나타내게 된다.
따라서, 버켓의 각도 변화는 실린더의 행정을 조절하 면서 가능하고 실린더의 행정은 비례제어밸브의 스 풀밸브의 이동을 통하여 제어가 가능하다. 이에 본 연구에서는 작업자가 기준 값을 설정하게 되면 제어 기는 버켓에 장착된 각도센서의 값과 기준 설정값을 비교하면서 기준값을 계속 유지하도록 스풀 밸브의 변위를 능동적으로 제어하는 방식으로 설계하였다.
3. 프론트 로더 시뮬레이터 제작
본 연구에서 설계한 버켓각도의 값을 실시간으로 센싱하면서 버켓의 각도를 일정하게 유지하는 제어 시스템은 Fig. 5와 같이 실제 현장에서 사용되는 25 마력급 농용 프론트로더 (TAESUNG, Model No.
ML4260X)를 기반으로 한 로더 시뮬레이터를 제작하
여 개발 제어시스템의 적용성과 성능을 실험적으로
구명하고자 하였다. 프론트 로더 시뮬레이터의 시스
템 구성은 Fig. 6에 나타난 바와 같이, 붐과 버켓 상 하강에 필요한 유압 실린더 구동 모터펌프로 구성된 유압팩과 유량 밸브와 회로부, 버켓, 실린더, 로더 구 조부, 유량과 방향을 조절하는 밸브와 상태를 감지하 는 센서를 포함하는 전자제어부로 이루어진다. 제어 는 트랙터 본체의 자세 변화에 의한 버켓 경사각의 변화정도를 측정하고, 기준 경사각과 비교하여 유압 실린더의 필요 변위를 계산하여 해당 전기신호를 CAN 메시지로 밸브에 전달하여 유압밸브의 스풀 열 림량을 변동하는 방식이다. 실린더의 변위와 버켓의 각도의 관계는 포텐셔미터(KDC-400, MINOR, China) 와 경사센서(SA2, DAS, Korea)를 각각 실린더와 버 켓부에 장착하여 구하였다.
Fig. 6 Schematic diagram showing the components of the self-leveling system for front-end loader.
3.1 유압 회로부 및 하중조건
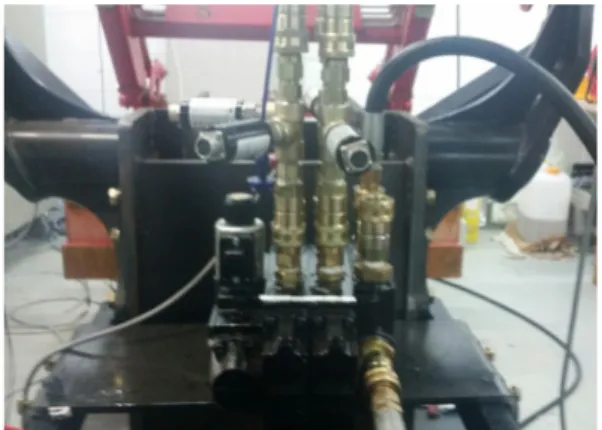
Fig. 7은 비례제어 유압밸브와 유압호스가 장착되 어 있는 모습을 나타낸다. 본 연구에서 사용한 유압 밸브는 스풀의 변위를 전자적으로 비례제어가 가능 한 밸브(SB23-EHS1, Rexroth, Germany)를 사용하였으 며, 밸브의 작동은 CAN메시지 전송을 통하여 스풀 변위값을 명령어로 전송이 가능하고 밸브에 내장된 ECU에서 자체적으로 밸브의 움직임을 피드백하면서 작동하는 구조이다. 밸브는 3개 채널로 구성되어 있 으며, 첫 번째와 두 번째 채널에는 붐 실린더와 버켓 실린더 작동을 유압공급 밸브로 사용하였으나 세 번 째 채널은 본 연구에서는 사용하지 않았다. 15-kW AC 모터를 동력원으로 사용하여 24.5L/min 유압 토 출이 가능한 기어펌프가 작동하도록 하였다. 로더 시 뮬레이터에 사용된 프론트 로더(ML426)의 적합 유량 은 17.5L/min였기 때문에 펌프의 토출량을 조절하기
위해 AC 모터 인버터(SV-IG5A110-4, LS Industrial Systems, Korea)를 장착하였다. 실험에 사용된 작동유 는 HLP-46을 사용하였다.
Fig. 7 Electro hydraulic proportional valve
다양한 하중조건을(0 ~ 200 kg) 구현하기 위해 버 켓에 20kg의 밸런스중량을 10 개 장착할 수 있는 버 켓 홀더를 Fig. 8와 같이 장착하였다. Fig. 9와 같이 버켓의 경사를 측정하기 위해 ±60° 측정 가능한 경 사각 센서(SA2, DAS, Korea)를 버켓에 부착하였으며, 실린더의 스트로크를 측정하기 위해 최대 400mm 측 정 가능한 포텐셔미터를 장착하였다.
Fig. 8 Weight holder in a bucket
7)Fig. 9 Tilt and potentiometer sensors mounted on
the front-end loader
3.2 전자 통신 및 제어부
본 연구에서는 ISO11783 표준에 기반하여 로더 ECU와 가상터미널(Virtual Terminal, VT) 및 조이스틱 ECU를 Fig. 10과 같이 구성하여 로더 ECU에서는 로 더 작동에 필요한 센서와 액추에이터의 작동을 담당 하고 VT-조이스틱 ECU는 로더 작동에 필요한 조이 스틱의 전기신호를 수집, CAN 메시지로 전송하는 역 할과 함께 로더의 작동상태 또는 작동명령 조건을 입력할 수 있는 가상터미널로 구성된다.
조이스틱 ECU에서 전송된 CAN메시지로 해당 밸 브 ECU는 솔레노이드 밸브에 의해 스풀 밸브가 움 직이면서 실린더 공급 유량을 조절하여 로더 붐의 상승하강, 버켓의 회전각을 변경하면서 적재물을 실 고 이동하는 작업이 가능하도록 하였다. 로더 ECU의 센서는 경사센서와 직선변위 센서인 포텐셔미터의 데이터를 수집하여 버켓각도 능동제어를 위한 센서 값으로 적용된다.
Fig. 10 Topology of experimental loader simulator
본 연구에서 개발한 로더 ECU와 조이스틱-VT ECU는 CANoe 프로그램(ver. 8.0, Vector Co., Germany)을 이용하여 Fig. 11과 같이 컴퓨터상에 가 상의 ECU를 구성하였으며 ECU간의 통신은 CAN 메 시지로 전송이 되도록 하였다. CAN 어댑터(VN1630,
Fig. 11 CAN message generator system
7)Vector Co., Germany)를 통하여 비례제어밸브와 CAN 메시지로 송수신 하였다. 또한 로더에 장착된 경사 센서, 포텐셔미터의 아날로그 신호를 읽기 위해 센서 신호 로깅이 가능한 VT system(VT2816, Vector Co., Germany)이 이용되었다. 또한 데이터의 노이즈 성 분, 필요 없는 신호를 제거하기 위해 저역통과필터 (Low Pass Filter)를 사용하여 신호처리를 하였다.
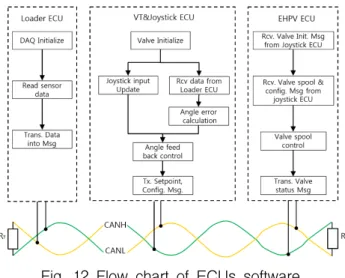
가상 ECU의 알고리즘 작성은 C언어와 유사한 CAPL 코드를 사용하였다. Fig. 12은 ECU들의 통신 알고리즘 순서도를 나타낸 것이며, Loader ECU는 경 사센서와 포텐셔미터의 아날로그 신호를 디지털로 변환된 CAN 메시지 데이터로 전송하기 위해 2개의 메시지를 만들었다. VT&Joystick ECU는 밸브(EHPV) 설명서(Rexroth, 2012)에 정의를 토대로 데이터베이스 를 구성하였으며, V1 Setpoint 메시지의 3 Byte 시그 널 데이터 값을 GUI패널을 이용해 변환하여 공급유 량조절을 하였다.
Fig. 12 Flow chart of ECUs software
4. 제어기의 매개변수 튜닝
각도 변화값을 실시간으로 인식하여 자동으로 조
절하는 제어기는 비례, 적분, 미분을 기반으로 하는
PID 방식의 능동회로로 개발하고자 하였으며 이를
위해 필요한 매개변수 값은 비례이득을 증가시켜 감
쇠진동이 일어나지 않는 시점의 임계값을 통해 각
파라미터 값은 시행착오적(trial and error) 방식을 통
해 구하였다. 즉, 비례제어밸브의 스풀 위치를 PID
(비례-적분-미분) 제어기의 매개변수 값의 결정은 우
선적으로 비례계수인 P 값을 변경하면서 과도 응답
과 안정 응답 조건에서 비례계수 값을 정하고 이후,
I 제어와 D 제어도 같은 방식으로 진행 하는 방식이
(a) (c)
(d) (b)
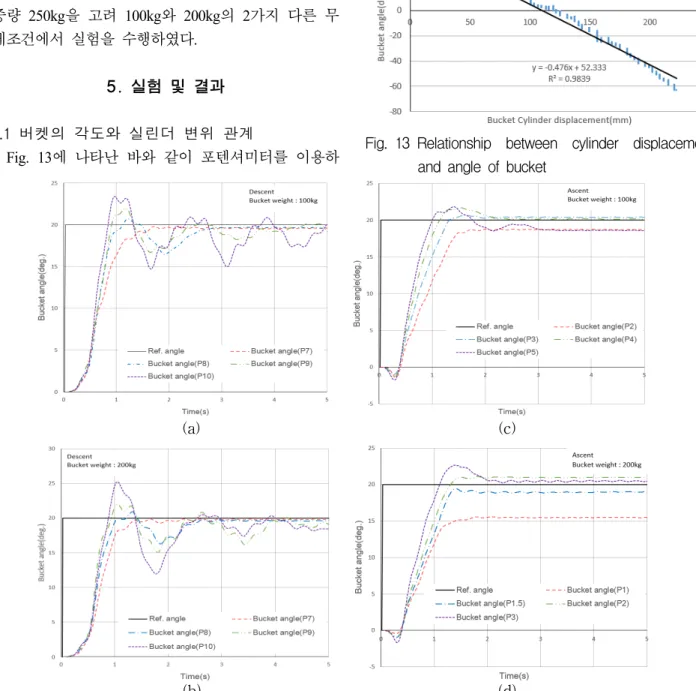
Fig. 14 Results of step response of the system obtained at 0 < Kp ≤ 10, Ki = 0, KD = 0 when the step input angles of +20° and –20° were provided.
다. 본 로더 시뮬레이터를 이용한 실내 실험에서는 트랙터 작업환경을 과수 재배 가능환경까지 고려하 여 최대 가파른 경사를 20° 수준으로 가정하고 트랙 터 본체의 경사 기울기를 가상으로 +20°, -20°의 경 사입력이 주어질 때 즉, 오르막길과 내리막길 주행으 로 가정하였을 때, 버켓의 각도는 원래 값을 기억하 여 반대 각도로 추종하도록 설계하였다. 실험은 3회 반복하였으며 버켓의 실린더 수축 및 이완 시 버켓 적재물에 걸린 무게로 인하여 밸브에 걸리는 부하가 다르기 때문에 버켓의 인가 무게에 따른 제어기 매 개변수의 영향성을 함께 고려하여 실제경사지 주행 시에 적합한 PID변수 튜닝을 실시하였다. 로더 버켓 의 인가 적재물의 무게는 사용된 25 마력급의 적재 중량 250kg을 고려 100kg와 200kg의 2가지 다른 무 게조건에서 실험을 수행하였다.
5. 실험 및 결과
5.1 버켓의 각도와 실린더 변위 관계
Fig. 13에 나타난 바와 같이 포텐셔미터를 이용하
여 측정한 버켓 실린더의 변위와 경사각 센서를 이 용하여 측정한 버켓의 각도와의 관계는 매우 높은 선형 관계를 나타내어, 버켓 각도의 능동제어는 유압 밸브의 스풀밸브의 열림량을 조절하여 실린더의 변 위를 변경하는 방법으로 구현이 가능할 수 있음을 보여주었다. 로더시뮬레이터에서 얻은 버켓각도와 실 린더 변위와의 회귀식은 다음과 같다.
(6)
Fig. 13 Relationship between cylinder displacement
and angle of bucket
(a) (c)
(d) (b)
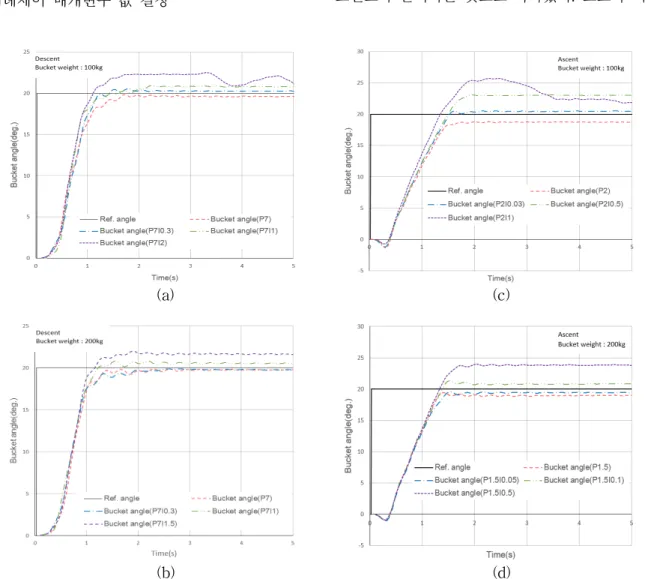
Fig. 15 Results of step response of the system with 0 ≤ Ki ≤ 2, KD = 0 and the step input angle of +20° and -20°
여기서 A
b는 버켓의 각도(Degree), D
c는 실린더 변 위(mm)를 나타낸다.
회귀분석 결과 결정계수 R
2값이 0.9839로, 버켓의 각도와 실린더 변위는 높은 상관관계를 나타냈다.
결과적으로 스풀밸브의 열림량에 따라 실린더 내 공급유량이 조절되면서 실린더 변위가 변하게 된다.
버켓 실린더에 링크와 힌지로 연결된 버켓의 각도는 조절된다. 관련 식은 앞서서 기술한 식을 식 (6)에 대 입하여 정리하면 각도변화 수식은 다음과 같이 정의 할 수 있다.
(7)
(8)
5.2 버켓 수평제어기 매개변수 튜닝 - 비례제어 매개변수 값 결정
제어기의 매개변수 값 결정은 먼저, 미분과 적분성 분은 추가하지 않고 비례 계수만을 변화시키면서 계 단입력에 대한 추종 시간영역 분석을 수행하였다.
Fig. 14은 버켓 입력 각도 +20°, -20°를 오르막과 내
리막 조건으로 가정하여 적재하중 100kg, 200kg 조건
하에서 Ki, KD를 0으로 설정하고 비례이득 값
(proportional gain)을 변화시켰을 때의 결과를 나타낸
다. Fig. 14 (a), (b)는 내리막, (c), (d)는 오르막 시 버
켓 인가하중에 따른 응답 결과를 보여준다. 내리막,
즉, -20° 계단입력에서 비례이득 값 7을 적용 하였을
때 100kg 하중에서는 제어 입력 신호에 대하여 약
0.5°정도의 정상상태 오차와 과도 응답(overshoot)은
없이 안정된 응답이 나타났으며 지연시간(delay-time)
은 약 0.67초로 나타났다. 200kg 하중에서도 제어 입
력 신호에 대하여 0.5°로 100kg의 조건과 같은 정상
상태 오차를 갖으며 과도응답 없이 안정된 응답이
나타났다. 하지만 지연시간은 약 0.73초로 100kg의
조건보다 늘어나는 것으로 나타났다. 오르막 시 비례
이득 값은 내리막의 경우보다 작은 값인 2를 적용 하였을 때 입력 신호에 대하여 약 1.3° 정도의 정상 상태 오차를 갖으며 과도응답 없이 안정된 응답이 나타났으나 지연시간은 약 0.87초로 오르막의 경우보 다 증가하는 특징을 나타내었다. 하지만, 적재하중 변화에 따른 영향성은 내리막에서의 경우보다 큰 차 이를 나타내지 않았다. 내리막 조건에서 더 높은 비 례계수가 필요한 것은 하강 시에 지구 중력의 버켓 영향성이 크게 작용하기 때문에 더 많은 유량이 공 급되어야 한다는 것을 의미한다. 비례 제어실험 결과 로부터 비례제어기는 비례값을 증가시키면서 주어진 계단입력에 대해 시간영역관점에서 만족스러운 성능 을 나타내는 것으로 확인하였다. 하지만, 지연시간은 최대 0.87초를 나타내어 급격한 경사각 변화에는 느 린 반응이 문제가 될 수 있으며 정상상태의 오차도 제거되지 않아 미분과 적분제어가 필요함을 나타내 었다.
- 적분제어와 미분제어 매개변수값 결정
Fig. 15은 경사각도(+20°, –20°)와 적재하중(100 kg 과 200kg) 조건에서 적분이득 값을 변경하였을 때 수 평제어시스템에 의한 버켓각도의 제어성능을 보여준 다. 비례이득 값은 고정하고, 적분이득 값(integral gain)은 0 < K
i≤ 2 조건에서 실험하였다. Fig. 15 (a), (b)는 내리막, (c), (d)는 오르막 시 버켓의 응답
100kg 200kg
100kg 200kg
Fig. 16 Change in percent overshoot at 0 ≤ Ki ≤ 2
200kg
100kg
100kg 200kg