† 신현재, 한국기계연구원, 자기부상연구실 E-mail : [email protected]
* 한국기계연구원, 자기부상연구실
상전도 흡인식 자기부상열차 분기기 주행 시의 부상공극변동과 분기기 거더의 진동 특성
Vibration chracterastics between levitation air-gap
and switching system griders
신현재† 이종민* 최장영**
Hyeon-Jae Shin Jong-Min Lee Jang-Young Choi
ABSTRACT
EMS-type Maglev vehicle maintains constant levitation air-gap between electromagnet and guideway by using gap sensor. The other words, when Maglev vehicles levitating over the guideway, mass of the vehicle effects through 1st (electromagnetic air-gap control) and 2nd (air-spring) suspension to grider. Resonace between electromagnetic suspension and grider could be occurred, which causes instability and poor ridecomfort. This paper is to test the dymanic interaction between levitation air-gap and switching system grider that has less mass and high natural frequencies than other type of general girders.
1. 서론
상전도 흡인식 자기부상열차는 거더 위에 설치된 가이드레일을 따라 주행하게 되며, 공극센서로 측정 한 가이드레일과 부상전자석 사이의 거리를 측정하고 이를 이용해 부상제어기에서 부상전자석에 공급되 는 전류를 조절하여 공극 높이를 일정하게 유지하게 해준다. 따라서 가이드레일 및 거더의 구조적인 특 성이 자기부상열차의 부상에 영향을 주며, 차량에서 발생된 진동이 가이드레일과 거더에 영향을 미칠 수 있다. 이러한 자기부상열차와 가이드레일 및 거더의 상호영향에 대한 시뮬레이션과, 거더의 질량 및 강성에 따른 특성은 다른 논문에서 알 수 있다.[1,2] 본 논문은 자기부상열차 선로의 일반적인 특성(질 량 및 강성)보다 작은 값을 갖는 분기기 구간 특성에 관심을 두고 주행속도 변화에 따른 부상공극의 변 동과 거더의 진동을 측정하고 이를 일반적인 구간과 비교하는데 목적이 있다.
1.1 실용화 사업 자기부상열차와 분기기 시스템
2013년 인천국제공항 인근의 약 6.1 km구간을 상업운행을 하게 될 중저속용 자기부상열차를 개발하 였으며, 현재 한국기계연구원 시험노선에서 시제차량에 대한 성능 평가 및 시험이 진행 중에 있다. 이 차량의 세부사항은 표 1과 같다. 분기기 시스템은 차량의 진행 방향에 따라 노선을 설정해주는 장치이 며, 자기부상열차의 특성상 대차가 궤도를 감싸고 주행하므로 분기기의 지지구조물은 거더 형태로 구성 된다. 따라서 일반 철차륜 방식의 분기기에 비하여 무게가 많이 나가며 복잡한 구조를 갖게 된다.[2] 그 림 2는 자기부상열차 실용화 사업의 일환으로 개발된 3방향 분기기 시스템과 자기부상열차의 모습이고 분기기의 세부사항은 표 2와 같다.
항목 세부 사항 차량 구성 2량 1편성
차량 외형 길이 12 m 폭 2.7 m 높이 3.4 m 승객 수송능력 230 명/차량
최고주행속도 110 km/h
부상공극 8 mm
최소회전반경 50 mR
최대등판능력 7 %
구동 전원 DC 1,500 V 3궤조 방식 가·감속 성능 가속 : 4.0 km/h/s
감속 : 4.0 km/h/s (운행시), 4.5 km/h/s(비상시) 도표 1. 실용화 사업 도시형 자기부상열차의 특징
중량 40 ton
분기 동작시간 20 초
구성 전체길이 : 약 27 m (구동부분)
3개의 이동거더 (단 경간 2개, 장 경간 1개) 도표 2. 분기기 시스템의 특징
그림 1. 상전도 흡인식 자기부상열차의 부상원리 그림 2. 주행 중인 자기부상열차와 분기기 (한국기계연구원 시험 선로)
2. 본론
자기부상열차의 분기기 구간 주행 시의 부상 공극 변화와 수직가속도, 분기기 거더의 수직 가속도 응 답을 측정하기 위하여 시험 진행은 자기부상열차 차상 신호 측정과, 분기기 거더의 수직 가속도 측정으 로 구분하였으며, 시험 조건은 분기기 위에서 정지부상, 10, 20, 30, 40㎞/h 로 왕복주행 하였다.
2.1 자기부상열차 주행 시 부상 공극 변화
자기부상열차에 설치된 차상계측 시스템을 활용하여 부상공극과 수직가속도를 측정하였다. 자기부상 열차의 부상 공극 신호는 맴돌이 전류(eddy current) 타입의 공극 센서를 사용하며, 부상레일의 연결부 위에서 급격한 변동을 보인다. 이는 실제적인 부상전자석과 부상레일과의 간격의 변화가 아닌 부상레일 의 연결 부위에서 보이는 특성으로 이 신호의 급격한 변동을 이용하면 좀 더 정확한 차량의 주행 위치 를 알 수 있다. 이를 위하여 측정된 신호 중 선두주행차량 1번 대차의 왼쪽편의 부상 공극 신호(MC1 1LF)를 이용하여 분기기 구간 주행 시의 부상공극 변화와 대차의 수직가속도 신호를 그림3 에 나타내 었다.
56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 6.0
6.5 7.0 7.5 8.0 8.5 9.0 9.5 10.0 10.5 11.0
56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 -5
-4 -3 -2 -1 0 1 2 3 4 5
M C 1 _ 1 L _ sG a p F [m m ]
Time[s]
MC1_1L_sGapF MC1_1L_sGapR
0 10 20 30 40 50
MC1_Velocity
S p e e d [ km /h ]
M C 1 _ 1 L _ A cc F V [m /s ^2 ]
Time[s]
MC1_1L_AccFV MC1_1L_AccRV
26 27 28 29 30 31 32 33 34 35 36 37 38
6.0 6.5 7.0 7.5 8.0 8.5 9.0 9.5 10.0 10.5 11.0
26 27 28 29 30 31 32 33 34 35 36 37 38
-5 -4 -3 -2 -1 0 1 2 3 4 5
M C 1 _ 1 L _ sG a p F [m m ]
Time[s]
MC1_1L_sGapF MC1_1L_sGapR
0 10 20 30 40 50
Speed
S p e e d [ km /h ]
M C 1 _ 1 L _ A cc F V [m /s ^2 ]
Time[s]
MC1_1L_AccFV MC1_1L_AccRV
① 10km/h(직선→곡선)방향 분기기 주행 시 Bogie 1의 부상 공극 변동
② 10km/h(곡선→직선)방향 분기기 주행 시 Bogie 1의 부상 공극 변동
21 22 23 24 25 26 27 28 29
6.0 6.5 7.0 7.5 8.0 8.5 9.0 9.5 10.0 10.5 11.0
21 22 23 24 25 26 27 28 29
-5 -4 -3 -2 -1 0 1 2 3 4 5
M C 1 _ 1 L _ sG a p F [m m ]
Time[s]
MC1_1L_sGapF MC1_1L_sGapR
0 10 20 30 40 50
Speed
S p e e d [ km /h ]
M C 1 _ 1 L _ A cc F V [m /s ^2 ]
Time[s]
MC1_1L_AccFV MC1_1L_AccRV
20 21 22 23 24 25 26 27 28 29
6.0 6.5 7.0 7.5 8.0 8.5 9.0 9.5 10.0 10.5 11.0
20 21 22 23 24 25 26 27 28 29
-5 -4 -3 -2 -1 0 1 2 3 4 5
M C 1 _ 1 L _ sG a p F [m m ]
Time[s]
MC1_1L_sGapF MC1_1L_sGapR
0 10 20 30 40 50
Speed
S p e e d [ km /h ]
M C 1 _ 1 L _ A cc F V [m /s ^2 ]
Time[s]
MC1_1L_AccFV MC1_1L_AccRV
③ 20km/h(직선→곡선)방향 분기기 주행 시 Bogie 1의 부상 공극 변동
④ 20km/h(곡선→직선)방향 분기기 주행 시 Bogie 1의 부상 공극 변동
16 17 18 19 20
6.0 6.5 7.0 7.5 8.0 8.5 9.0 9.5 10.0 10.5 11.0
16 17 18 19 20
-5 -4 -3 -2 -1 0 1 2 3 4 5
M C 1 _ 1 L _ sG a p F [m m ]
Time[s]
MC1_1L_sGapF MC1_1L_sGapR
0 10 20 30 40 50
Speed
S p e e d [ km /h ]
M C 1 _ 1 L _ A cc F V [m /s ^2 ]
Time[s]
MC1_1L_AccFV MC1_1L_AccRV
22 23 24 25 26 27
6.0 6.5 7.0 7.5 8.0 8.5 9.0 9.5 10.0 10.5 11.0
22 23 24 25 26 27
-5 -4 -3 -2 -1 0 1 2 3 4 5
M C 1 _ 1 L _ sG a p F [m m ]
Time[s]
MC1_1L_sGapF MC1_1L_sGapR
0 10 20 30 40 50
Speed
S p e e d [ km /h ]
M C 1 _ 1 L _ A cc F V [m /s ^2 ]
Time[s]
MC1_1L_AccFV MC1_1L_AccRV
⑤ 40km/h(직선→곡선)방향 분기기 주행 시 Bogie 1의 부상 공극 변동
⑥ 40km/h(곡선→직선)방향 분기기 주행 시 Bogie 1의 부상 공극 변동
그림 3. 자기부상열차의 분기기 구간 주행 시 속도에 따른 부상공극과 대차의 수직가속도 변동
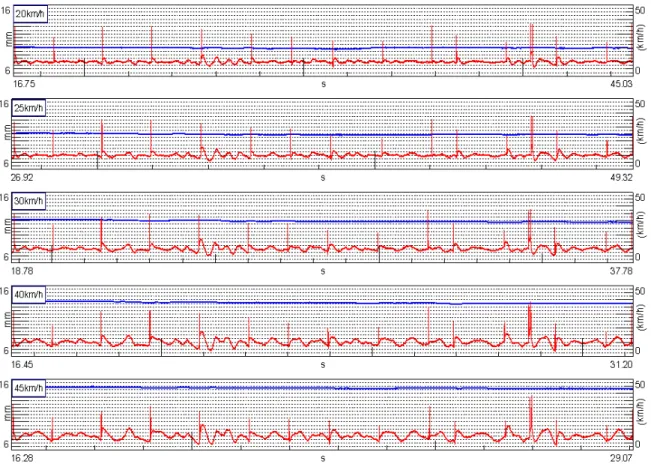
최대 공극 변동은 40㎞/h 로 곡선에서 직선방향으로 주행 시 2.27 ㎜이고, 이를 제외한 모든 값에서 2 ㎜이하의 값을 보여주므로 최대공극변동 기준인 ±3 ㎜ 이내에 해당한다. 다른 구간 주행 시의 부상 공극 변동을 비교해 보고자 그림 4에 180mR 곡선구간 주행 시의 주행속도에 따른 부상공극 변동을 나 타내었다. 분기기 이외의 구간 (180mR 곡선)에서는 44 km/h 로 주행 시 2.84 ㎜ 의 최대 공극 변동을 보여주며 속도에 따른 최대 공극 변동은 그림 5에 표시하였다. 분기기 구간과 180mR 구간 주행 시의 최대 공극 변동의 직접적인 비교는 어렵지만 분기기 구간의 부상공극변동이 다른 일반적인 선로 구간의
그림 4. 180mR 곡선부근 동일구간 주행 시 주행속도별 부상공극 변동
분기기구간
주행속도 (㎞/h) 10 20 30 40 비고
직선→곡선 방향주행
최대공극변동
(㎜) 1.04 1.46 1.73 1.88
정 지 부 상 시 최 대 공 극 변 동
:0.77mm 평균값 : 7.97mm 곡선→직선
방향 주행
최대공극변동
(㎜) 0.84 1.36 1.78 2.27 180mR
곡선구간
주행속도 (㎞/h) 20 25 30 38 44
최대공극변동(㎜) 1.61 2.03 2.38 2.76 2.84
도표 3. 자기부상열차 분기기 구간 주행 시 주행속도에 따른 최대 공극변동과 수직가속도
2.2 수직 가속도 응답
자기부상열차의 수직가속도는 각 대차에 설치된 수직가속도 신호를 이용하여 측정하였으며, 선두주행 차량 (MC1)의 각각의 rms의 평균값을 나타내었다. 이때의 최댓값은 40㎞/h로 주행 시 약 0.78 ㎨ 의 값을 보여준다.
자기부상열차 주행 시의 분기기 거더의 수직 가속도 응답은 분기기 거더의 아랫부분에 등간격으로 가속도 센서를 부착하였으며 측정된 신호를 이용하여 동일시간에 대한 대상거더의 모든 측정신호에 rms 값을 취한 뒤 그 값의 평균은 다음과 같다.
주행속도 (㎞/h) 10 20 30 40 자기부상
열차수직 가속도
직선→곡선
방향주행 수직가속도 rms (㎨) 0.637 0.6664 0.686 0.6958 곡선→직선
방향 주행 수직가속도 rms (㎨) 0.637 0.6566 0.6664 0.686
분기기 거더 수직 가속도
직선→곡선 방향주행
단 경간 거더 #1(㎨) 0.0797 0.1510 0.1317 0.1249 단 경간 거더 #2(㎨) 0.0594 0.1128 0.1013 0.1042 장 경간 거더(㎨) 0.0531 0.0668 0.0966 0.0980
곡선→직선 방향 주행
단 경간 거더 #1(㎨) 0.0632 0.1135 0.1509 0.1281 단 경간 거더 #2(㎨) 0.0458 0.0856 0.1052 0.0926 장 경간 거더 (㎨) 0.0562 0.0714 0.0908 0.0999 도표 7. 자기부상열차 분기기 구간 주행 시 주행속도에 따른 수직가속도
3. 결론
이상의 실험을 통해 얻은 결과를 그래프로 나타내어 보면 주행속도가 증가할수록 부상공극변동이 증 가하게 되며, 대차의 수직가속도 변동도 커지게 된다. 이를 분기기 구간이 아닌 다른 구간과 비교하여 보아도 특별하게 큰 값을 갖지 않음을 보여주며, 부상공극변동은 약 40㎞/h 이내 주행 시에 주행속도에 따라 비례적으로 증가하는 경향을 보여준다.
거더의 진동은 그림 6을 참고하면 주행 패턴에 따라 직선에서 곡선방향으로 주행 시에는 20㎞/h 주행 시가 크게 나타났고, 곡선에서 직선방향으로 주행 시 30㎞/h 주행 시의 진동이 크게 나타났다. 그리고 40㎞/h 주행 시에는 오히려 값이 작게 측정되는 것을 알 수 있다. 이는 거더의 진동이 작게 발생했다고 생각되며 주행속도가 빠를 때에는 분기기 구간의 통과 시간이 짧아져 진동이 발생할 수 있는 시간이 짧 아진 것도 영향을 주었다고 판단된다.
10 20 30 40
0.8 1.0 1.2 1.4 1.6 1.8 2.0 2.2 2.4 2.6 2.8
3.0
Switch system section Straight : 60mR 60mR : Straight 180mR section 180mRMaximum fluctuation air gap [mm]
Speed [km/h]
10 20 30 40
0.64 0.66 0.68 0.70 0.72 0.74 0.76 0.78 0.80
0.82
Straight : 60mR 60mR : StraightVetical Acc(RMS) [m/s2 ]
Speed [km/h]
10 20 30 40 0.04
0.05 0.06 0.07 0.08 0.09 0.10 0.11 0.12 0.13 0.14 0.15 0.16 0.17 0.18
Short span_1 Short span_2 Long span
Grider vetical Acc [m/s2 ]
Speed [km/h]
10 20 30 40
0.04 0.05 0.06 0.07 0.08 0.09 0.10 0.11 0.12 0.13 0.14 0.15 0.16 0.17 0.18
Grider vetical Acc [m/s2 ]
Short span_1 Short span_2 Long span
Speed [km/h]
60mR : Straight Straight : 60mR
그림 6. 분기기 통과시 속도 변화에 따른 거더의 수직 가속도
참고문헌
1. 이종민, 김기정, 이영신, “자기부상열차 분기기 형상에 따른 주행 안정성 해석”, 대한기계학회 CAE 및 응용역학부분 춘계학술대회, pp.218-219, 2010
2. K.J. Kim, J.M. Lee, H.S. Han and S.J. Yang, "Running safety of an EMS-type urban Maglev vehicle travelling over a segmented switch", ACMD 2010 Proceeding 2010
3. 이창영, 한영재, 이형우, 이영훈, 권혁빈, 강부병, “일본의 초전도 자기부상열차 기술 개발 및 실용화 현황”. 한국철도학회저널 pp.17-22, 2008.9