1. 서 론
일반적으로 초월공동 수중운동체란 운동체 전두부에 위치한 캐비테이터(cavitator)의 끝단에서 발생한 공동이 몸체의 전부를 덮은 상태에서 운용되는 시스템을 지칭한다. 이때 초월공동은 고 속운동에 따른 주위 압력강하에 의해 캐비테이터 끝단에서 발생 하는 자연 초월공동(natural supercavitation)과 캐비테이터 후방 에서 인위적으로 공기를 분사시킴으로써 발생하는 인공 초월공 동(artificial supercavitation)으로 구분된다. 특히, 상대적으로 낮 은 속도에서 발생시키는 인공 초월공동은 자연 초월공동이 발생 되기 전까지 마찰저항을 줄여 추진효율을 높이고, 부분 공동이 생성되는 과정에서 발생하는 불균일한 유체력을 감쇠시켜 주행 안정성을 높이는 역할을 한다.
2차 세계대전 직후 초월공동을 이용한 수중운동체의 마찰저항
감소와 그에 따른 고속화 기술에 관한 개념이 정립되는 과정에서 자연 초월공동에 관한 기초 이론과 제한된 모형에 대한 실험연구 들이 시작되었으며, 대표적으로 Plesset and Shaffer (1948), Tulin (1953), Wu (1955), Self and Ripken (1955), Garabedian (1956), Waid (1957)의 연구가 있다. 그 후 군사목적용 기술개 발의 성격상 러시아를 중심으로 제한된 범위에서 연구결과들이 공개되어오다가 2000년대에 들어 차세대 어뢰에 적용할 수 있 고, 다양한 몰수체의 고속화에 응용이 가능한 핵심 기술로 인식 되면서 초월공동에 대한 국내외적인 관심이 다시 높아지고 있다.
국내에서는 2009년부터 관련 연구가 시작되었으며, Ahn, et al.
(2012)과 Kim, et al. (2013)은 자연 초월공동에 대한 실험 및 수 치해석법을 개발한 바 있고, Ahn, et al. (2017)은 다양한 형상의 캐비테이터를 대상으로 공기 분사량 변화에 따라 발생하는 인공 초월공동의 발생특성에 관한 실험연구를 수행하였다. 초월공동 수중운동체는 최소 100 m/s(약 200노트) 이상의 고속으로 주행
초월공동 수중운동체용 제어핀의 유체력 특성에 대한 실험연구
정소원․ 박상태․ 안병권† 충남대학교 선박해양공학과
An Experimental Study on Hydrodynamic Characteristics of a Control Fin for a Supercavitating Underwater Vehicle
So-Won Jeong
․
Sang-Tae Park․
Byoung-Kwon Ahn†Department of Naval Architecture & Ocean Engineering, Chungnam National University
This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License(http://creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Wedge-shaped fins are generally used to provide sufficient forces and moments to control and maneuver a supercavitating vehicle. There are four fins placed along the girth of the vehicle, near he tail: two of the fins are horizontal and the other two fins are vertical. In a fully developed supercavitating flow condition, a part of the fin is in a cavity pocket and the other is exposed to water. In this paper, experimental investigations of hydrodynamic characteristics of the wedge-shaped fin models are presented. Experiments were conducted at a cavitation tunnel of the Chungnam National University. We first closely observed the typical formation of wake cavitation and measured lift and drag forces acting on two different test models. Next, using a special device for generating natural and artificial supercavities, we investigated hydrodynamic forces at different cavitation number conditions. This work provides a basis for interpreting the cavity stability and hydrodynamic characteristics of the wedge-shaped control fin for a supercavitating vehicle.
Keywords :
Cavitation(캐비테이션, 공동), Natural supercavitation(자연 초월공동), Artificial supercavitation(인공 초월공동), Control fin (제어핀)에서 발생하는 공동유동과 유체력 특성에 관한 실험결과를 다루 고 있다. 이를 위해 형상이 다른 2 종의 3차원 쐐기형 제어핀을 대상으로 자연 및 인공 초월공동 상태를 모사할 수 있는 실험장 치를 고안하였다. 먼저 제어핀 단독성능 실험을 통해 각 형상별 제어핀에서 발생하는 유동 특성과 작용하는 유체력 특성을 평가 하였으며, 원판형 캐비테이터로부터 자연 및 인공 초월공동이 발 생하는 상태에서의 제어핀 주위 유동 특성과 접수면적의 차이에 따른 유체력 특성을 평가하였다.
2. 실험 장치 및 모형
실험은 충남대학교 캐비테이션 터널(CNU-CT)에서 수행되었 으며 터널 시험부의 단면 크기는 100 mm x 100 mm이고 최대 유속은 20 m/s이다(Table 1 참조). 본 캐비테이션 터널은 자연 초월공동 뿐만 아니라 인공 초월공동 실험 시 관측부에서 발생한 기포가 다시 시험부로 돌아오기 전에 포집할 수 있는 장치를 갖 추고 있으며, 그동안의 연구결과를 통해 그 성능을 충분히 검증 하였다 (Ahn, et al., 2017).
Test section (I) 100 mm x 100 mm (Contraction ratio 15:1)
Test section (II) 120 mm x 50 mm (Contraction ratio 25:1) Max. flow speed 20 m/s (I), 30 m/s (II)
Motor power 90 kW (120HP) centrifugal pump Pressure (abs) 10 kPa ~ 300 kPa Vacuum pump 5x10-4 Torr (750W) Air compressure 8 kgf/cm2 (5HP)
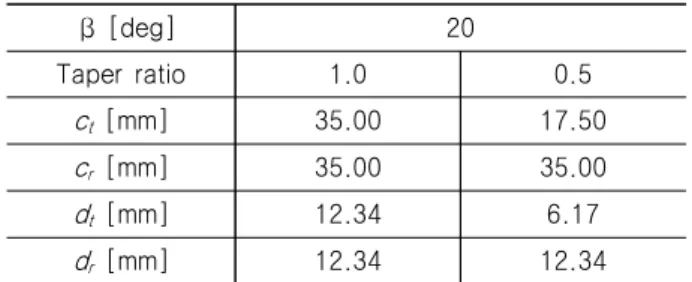
Table 1 CNU-CT Specifications제어핀은 쐐기각(β)이 20°이고 테이퍼비(Taper Ratio, TR)가 1.0과 0.5인 모형을 사용하였으며(Fig. 1 참조), 각 모형의 주요 치수는 Table 2와 같다. 앞서 설명한 바와 같이 초월공동 수중운
월공동의 절반이 모사되도록 Fig. 2와 같이 구성하였다. 여기서, 제어핀 앞날로부터 153 mm 전방에 위치한 원판형 캐비테이터 (dc=30 mm)의 끝단에서 초월공동이 생성되며, 캐비테이터 후방 에 위치한 3개의 분사홀(직경 2 mm)을 통해 압축공기를 분사시 켜 인공 초월공동이 발생되도록 하였다. 제어핀의 받음각(α)을 0 도에서 15도까지 5도 간격으로 조절하며 실험을 수행하였으며, 이때 제어핀에 작용하는 양·항력 특성을 분력계를 사용하여 계측 하였다. 또한 공동 유동의 발생과정을 보다 엄밀하게 관찰하기 위해 시험부의 정면과 상부에서 초고속 카메라(Photron Mini100, 800,000 fps)를 동기화시켜 기록하였다. 이때 자연 및 인공 초월 공동의 특성 및 유동 특성은 다음과 같이 정의되는 자연 캐비테 이션수(σn)와 인공 캐비테이션수(σc) 그리고 레이놀즈수(Rn)를 사 용하여 평가하였다.
Fig. 1 Configuration of the test model
∞
(1)
∞
(2)
(3)
Fig. 2 Schematic view of the experimental set-up
여기서, P∞ 는 터널내부 압력, Pv 는 물의 증기압, ρ 는 물의 밀 도, υ 동점성계수, Cr 은 제어핀 뿌리의 코오드 길이, 그리고 V 는 유입유속 이다. Pc 는 인공 초월공동 내부의 압력으로 본 연 구에서는 절대압력센서(Kulite ETM-200-375)를 사용하여 계측 하였다(Fig. 2 참조).
3. 실험 결과
3.1 단독 제어핀에 작용하는 유체력 특성
초월공동 상태에 놓여있는 제어핀 주위의 유동 및 유체력 특 성을 확인하기에 앞서, Fig. 2의 실험장치 중 캐비테이터 및 초 월공동 발생 장치가 없는 상태, 즉 균일 유입유동 중의 단독 제
어핀 주위의 유동 및 유체력 특성에 관한 실험을 수행하였다.
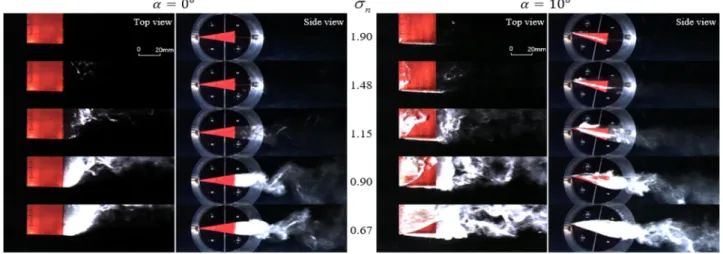
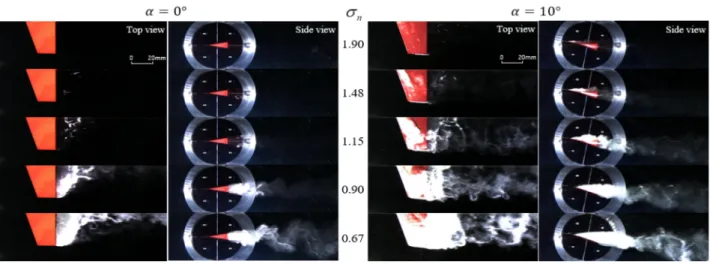
Fig. 3과 Fig. 4는 테이퍼비가 1.0과 0.5인 제어핀의 받음각이 0°인 경우와 10°인 경우 유동속도가 증가할수록, 즉 캐비테이션 수(σn)가 감소할 때 발생하는 공동의 생성 및 발달 과정을 보여준 다. 캐비테이션수가 감소함에 따라 제어핀의 뒷날에서는 무딘 몰 수체(blunt body)의 후류에서 발생하는 전형적인 공동유동 특성 이 나타난다. 제어핀의 뒷날 끝단에서 발생한 공동이 성장하여 후류의 일정 영역에서 닫힌 와류 공동을 형성하며, 그 뒤로 먼 후류 영역까지 Karman 와류가 발생한다. 제어핀의 받음각이 커 지면 윗면(흡입면)에서는 얇은층 공동(sheet cavitation)이 성장 하며, 상하면에 작용하는 압력차이로 인해 날개 끝 와류 공동(tip vortex cavitation)이 발생하고 이로 인해 윗면의 얇은층 공동은 날개의 뿌리(root) 쪽으로 비대칭 형상으로 나타나는 것을 확인 할 수 있다.
Fig. 3 Cavity formation of the control fin (TR=1.0) at different cavitation numbers
Fig. 4 Cavity formation of the control fin (TR=0.5) at different cavitation numbers
(a) Measured lift forces
(b) Measured drag forces
Fig. 5 Comparison of the lift and drag forces between different taper ratios
Fig. 5 (a)와 (b)는 두 제어핀의 받음각 변화에 따라 작용하는 양력과 항력 값을 보여준다. 유속이 증가함에 따라 제어핀에 작용 하는 양력특성은 일반적인 수중익에서와 마찬가지로 속도의 제곱 에 비례해서 커지며, 받음각이 커짐에 따라 동일 속도에서 양력의 크기가 크고 공동의 초생 속도도 빨라짐을 알 수 있다. 특히 받음 각이 10° 이상인 경우 공동 상태에서도 일정하게 증가하던 양력 값은 실속(stall) 현상이 발생하면서 급격히 감소하는 것을 알 수 있다. 항력 또한 양력과 동일한 특성을 보이지만, 제어핀 후류의 닫힌 와류 공동이 성장하여 마치 유선형 물체와 같은 역할을 함에 따라 모든 받음각 상태에서 동일하게 일정 속도 이상에서는 감소 하는 특성을 보인다.
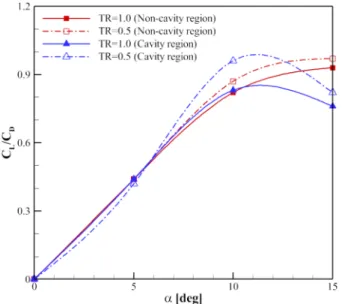
Fig. 6 (a)와 (b)는 두 제어핀의 양력계수(CL)와 항력계수(CD) 를제어핀 뿌리의 코오드 길이(cr)를 기준으로 한 레이놀즈수(Rn) 의 변화에 따라 비교하였다. 이때 양력계수의 기준 면적은 제어핀 의 스팬 길이와 코오드 길이의 곱인 평면면적(planform area)으로 정의하였으며, 항력계수는 스팬 길이와 두께의 곱인 정면면적 (frontal area)으로 정의하였다. 여기서 점선은 공동이 초생되는 지점으로 좌측은 비공동 구간을, 우측은 공동 구간을 의미한다.
비공동 구간을 거쳐 일부 공동 구간에서도 양력계수의 값은 일정 하게 유지되며, 받음각이 10° 이상인 경우 실속 현상이 발생하기 이전에 크게 증가하였다가 감소하는 특성을 보인다. 이는 Fig. 3 에서 확인할 수 있는 바와 같이 상대적으로 큰 받음각 상태에서는 강하게 발생한 날개 끝 와류가 윗면의 얇은층 공동을 날개의 뿌리 (root) 쪽으로 밀어냄으로써 공동 발생 면적을 줄이고, 윗면의 유 속을 증가시키기 때문인 것으로 판단된다. 항력계수도 유사한 경 향을 보이지만 모든 받음각에서 동일하게 특정 레이놀즈수 이상에 서 급격하게 감소하는 것을 알 수 있는데, 이는 앞서 설명한 바와 같이, 제어핀과 후류의 닫힌 와류 공동이 유선형화 되어 항력이 감소함에 따라 나타나는 특성으로 이해할 수 있다. 이때 테이퍼비 가 작은 제어핀의 경우 받음각 10° 이하에서의 항력계수 값은 거 의 동일하지만, 공동의 발생 정도에 따라 나타나는 항력계수의 증 가 특성이 차이가 있는 것을 알 수 있다.
(a) Comparison of the lift coefficients
(b) Comparison of the drag coefficients
Fig. 6 Comparison of the lift and drag coefficients between different taper ratios
Fig. 7은 테이퍼비가 서로 다른 두 제어핀에 작용하는 양항비 특성으로 비공동 유동상태의 양항비와, 공동 유동상태 중 항력 값 이 최대로 작용하는 레이놀즈수에서의 양항비 특성을 구분하여 비 교하였다. 먼저 비공동 상태의 경우 5° 이하의 받음각 상태에서는 테이퍼비에 상관없이 일정하게 타나며, 받음각이 커질수록 테이퍼 비가 작은 제어핀의 양항비가 크게 나타나는 것을 알 수 있다. 또 한 최대 항력이 작용하는 공동 상태의 경우 비공동 유동상태와 마 찬가지로 받음각이 커질수록 테이퍼비가 작은 제어핀의 양항비가 커지는 것을 알 수 있다.
3.2 초월공동 상태의 제어핀에 작용하는 유체력 특성
앞서 설명한 바와 같이 제어핀의 일부는 초월공동 속에 위치하 고, 나머지 일부는 물과 접촉하는 특수한 운용조건을 모사할 수 있는 장치를 제작하여 제어핀 주위의 공동유동 특성을 관찰하고 작용하는 유체력을 계측하였다.
Fig. 7 Comparison of the lift-to-drag ratios between different taper ratios
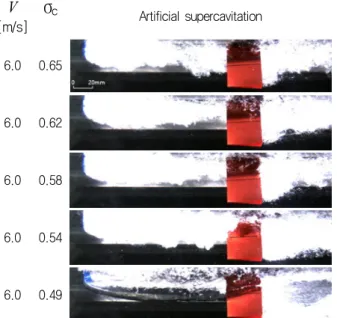
Fig. 8과 Fig. 9는 TR=1.0인 제어핀의 받음각이 0°인 상태일 때 제어핀의 전방에 위치한 직경 30 mm인 원판형 캐비테이터에 서 발생한 자연 초월공동과 인공 초월공동이 발달하는 과정을 보 여준다. 여기서, 자연 초월공동은 터널 유속이 증가할 때 자연적 으로 발생하는 초월공동이며, 인공 초월공동은 자연 공동이 발생 하지 않는 낮은 유속에서 공기 분사량을 증가시킬 때 발생하는 초 월공동이다. Fig. 8은 유입유속이 12.6 m/s에서 16.5 m/s로 증가 할 때 자연 초월공동의 생성과 발달 과정으로 유속이 증가할수록 공동이 성장하여 캐비테이션수(σn) 0.49 조건에서는 제어핀의 절 반을 덮는 초월공동이 발행하는 것을 확인할 수 있다. Fig. 9는 유 입유속이 6.0 m/s 상태, 즉 자연 공동이 발생하지 않는 상태에서 캐비테이터 후방에서 분사되는 공기의 양을 증가시킴에 따라 생성 되는 인공 초월공동의 발달 과정을 보여준다. 이 때 분사되는 공 기량은 식 (4)와 같이 정의되는 공기공급계수(Cq)로 정량화하였으 며, 여기서
는 분사되는 공기의 체적유량이다.
(4)
Cq=0.2인 분사량 조건에서 식 (2)와 같이 정의된 캐비테이션수 (σc)는 0.49인 조건이 되며, 이 때 발생한 인공 초월공동의 특성은 같은 캐비테이션수(σn)의 자연 초월공동과 동일한 크기의 공동이 생성되는 것을 확인할 수 있다.
Fig. 10은 제어핀의 받음각이 0°에서 자연 공동이 발달하는 과 정에서 작용하는 항력 값을 보여준다. 유속증가로 인해 캐비테이 션수가 낮아질수록 항력은 속도의 제곱에 비례하여 커지다가 캐비 테이션수가 0.6보다 작아지면서, 즉 제어핀의 일부가 초월공동으 로 덮이면서 급격하게 낮아지는 것을 알 수 있다. 특히 초월공동 이 발생한 최소 캐비테이션수 조건에서는 최대 항력의 약 20% 수 준으로 급감하는 것을 알 수 있다. 이와 같은 특성은 테이퍼비가 0.5인 제어핀의 경우에도 동일하게 나타남을 알 수 있다.
16.5 0.49
Fig. 8 Development of the natural supercavitation
V
[m/s]σ
cArtificial supercavitation 6.0 0.65
6.0 0.62
6.0 0.58
6.0 0.54
6.0 0.49
Fig. 9 Development of the artificial supercavitation
Fig. 10 Drag force versus natural cavitation number
Fig. 11 Comparison of the drag coefficient at different cavitation characteristics
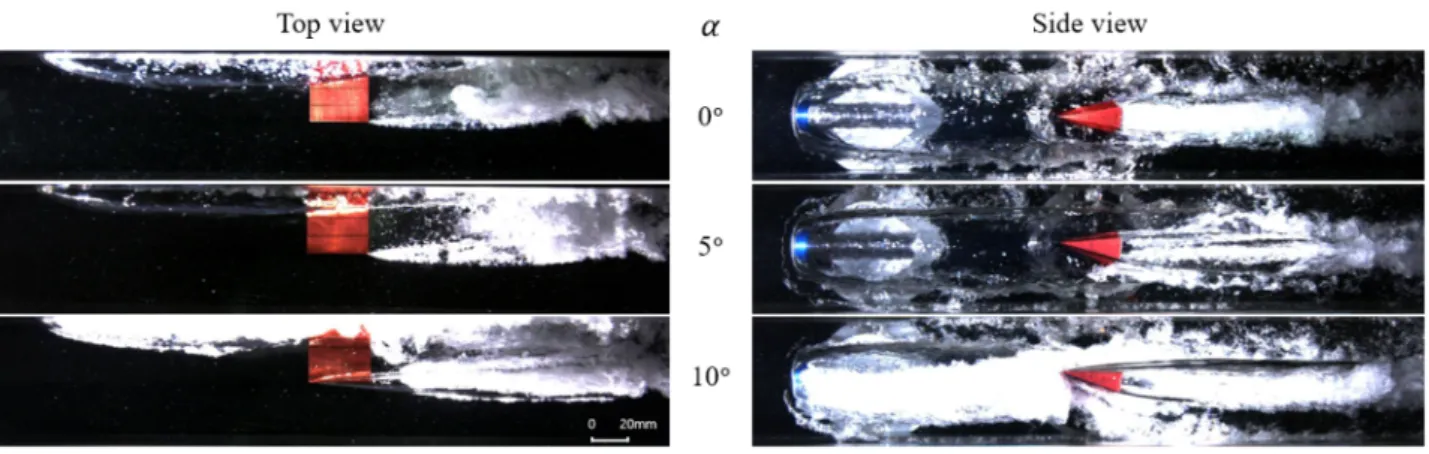
Fig. 12와 Fig. 13은 전방 캐비테이터의 직경이 30mm로 동일 하고, 제어핀의 테이퍼비가 각각 1.0과 0.5일 때 받음각 변화에 따라 발생하는 인공 초월공동의 형상을 보여준다. 두 제어핀 모 두 받음각이 0°도와 5°도인 경우 전방 캐비테이터에서 발생한 깨 끗한 초월공동이 제어핀 후류까지 지속되는 반면 받음각이 10°
에서는 초월공동의 내부가 물과 공기가 섞인 포말 형태로 발달하 는 것을 확인할 수 있다. 이는 제어핀의 받음각이 커지면서 초월 공동이 제어핀의 아랫면에 부딪히면서 깨지게 되고 이로 인해 공 동 내부로 재돌입하는 포말형태의 유동이 발생하기 때문이다. 이 는 후방의 제어핀이 초월공동 수중운동체를 제어하기 위해 과도 하게 받음각을 변경할 때 오히려 초월공동의 형성을 방해할 수 있음을 보여준다.
Fig. 14의 (a), (b)는 테이퍼비가 서로 다른 두 제어핀에 작용 하는 양력계수와 항력계수 특성을 레이놀즈수 변화에 따라 나타 내었다. 앞선 제어핀 단독 실험 결과와 비교하였을 때 비공동 및 공동 유동 조건에서 양력계수와 항력계수의 변화는 비공동 영역 에서 일정하게 유지되던 양력계수와 항력계수가 공동이 발생한 이후 실속 현상이 발생하기 이전에 크게 증가했다가 감소하는 현 상이 동일하게 나타나는 것을 확인할 수 있다. 다만 전방 캐비테
Fig. 12 Comparison of the artificial supercavitation at different angle of attack of control fin (TR=1.0)
Fig. 13 Comparison of the artificial supercavitation at different angle of attack of control fin (TR=0.5)
(a) Lift coefficients
(b) Drag coefficients Fig. 14 Lift and drag characteristics according to different angles of attack
이터에서 발생한 공동이 발달함에 따라 제어핀에 영향을 미치게 되며 이는 양력계수와 항력계수가 감소하는 정도가 제어핀 단독 실험결과보다 훨씬 크게 나타나는 것을 통해 알 수 있고 이러한 특성은 양력계수보다 항력계수에서 더 분명하게 나타남을 알 수
있다. 이는 전방 캐비테이터에서 발생한 공동이 성장하여 초월공 동으로 발생할 때 공동이 제어핀을 덮음으로써 제어핀에 작용하는 양력계수와 항력계수가 제어핀 단독 실험 결과보다 더 작게 계측 되는 것으로 이해할 수 있다.
먼저 제어핀 단독 유체력 특성 실험을 통해 제어핀 형상 및 받 음각 변화에 따라 발생하는 공동유동의 특성을 두 대의 초고속 카 메라를 동기화 시켜 관측하였으며, 비공동 및 공동유동 상태에서 작용하는 양·항력 특성을 평가하여 제어핀의 윗면과 후류면 그리 고 날개 끝에서 발생하는 공동유동에 따라 유체력 특성이 달라짐 을 확인하였다. 특히 실속이 발생하는 받음각 상태에서의 양력 특 성의 변화와 후류에서 발생하는 공동형상에 따른 항력 특성의 변 화를 정량적으로 분석하였으며, 테이퍼비 변화에 따른 양·항력 특 성을 평가하였다. 또한 고속 유동조건에서 발생하는 자연 초월공 동과 상대적으로 저속에서 인위적으로 공기를 분사시킴으로써 발 생하는 인공 초월공동은 같은 캐비테이션수 조건에서 동일함을 확 인하였다. 그리고 유체력 특성의 경우 상대적으로 낮은 레이놀즈 수 영역에서는 제어핀 단독의 결과와 동일한 경향을 보이나 전방 캐비테이터로부터 발생하는 초월공동이 제어핀의 일부를 덮으면 서 급격한 항력과 양력의 감소가 발생함을 확인하였다. 또한 과도 한 받음각 조건에서는 제어핀이 초월공동의 형성을 방해하는 것을 확인하였으며 이러한 특성이 양력과 항력에도 나타남을 알 수 있 었다.
후 기
본 연구는 한국연구재단 원천기술개발사업(NRF-2014M3C1A 9060786), 산업융합원천기술개발사업(10045337)과 산업핵심기 술개발사업(10062293)의 지원으로 수행되었다.
References
Ahn, B.K. Lee, T.K. Kim, H.T. & Lee, C.S., 2012.
Experimental investigation of supercavitating flows.
International Journal of the Society of Naval Architects and Ocean Engineering, 4(2), pp.123-131.
Ahn, B.K. Jeong, S.W. Kim, J.H. Shao, S. Hong, J. &
Arndt, R.E.A., 2017. An experimental investigation of artificial supercavitation generated by air injection
the Society of Naval Architects of Korea, 50(3), pp.160-166.
Plesset, M.S. & Shaffer, P.A., 1948. Cavity drag in two and three dimensions. Journal of Applied Physics, 19(10), pp.934-939.
Self, M.W. & Ripken, J.F., 1955. Steady-state cavity studies in a free-jet water tunnel. Washington D.C.
:
St. Anthony Falls Hydraulic Laboratory, Report No.47.
Tulin, M., 1953. Steady two-dimensional cavity flows about slender bodies. Maryland: David Taylor Model Basin(DTMB), Report No. 834.
Waid, R.L., 1957. Water tunnel investigation of two-dimensional cavities. California: The Hydrodynamics Laboratory of California Institute of Technology, Report No. E-73.6.
Wu, T.Y., 1955. A free streamline theory for two-dimensional fully cavitated hydrofoils. California:
The Hydrodynamics Laboratory of California Institute of Technology, Report No. 21-17.
정 소 원 박 상 태 안 병 권