Manuscript received August 22, 2016, accepted December 30, 2016
ISSN 2465-8111(Print), 2466-0124(Online), DOI http://dx.doi.org/10.18770/KEPCO.2016.02.04.619
김병진
*, 강석주
*†, 박준영
***
Electronic Engineering, Sogang University, 35 Baekbeom-ro, Mapo-gu, Seoul, 04107, Korea
**
KEPCO Research Institute, Korea Electric Power Corporation, 105 Munji-ro Yuseong-gu, Daejeon 34056, Korea
†[email protected]
Abstract
In this paper, we propose a new fault diagnosis monitoring system using gyro sensor-based angular velocity calculation for blades of the wind turbine system. First, the proposed system generates the angular velocity dataset for the rotation speed of the normal blade.
Using the dataset, we estimate and evaluate the state of blades for the wind turbine by comparing the current state with the pre-calculated normal state. In the experimental results, the angular velocity of the normal state was higher than 360°/s while that of the damaged blades was lower than 360°/s and the standard deviation of the angular velocity was significantly increased.
본 논문에서는 풍력 발전 시스템에서 발생 가능한 고장 중 블레이드에 대한 고장 진단 방법으로 자이로 센서를 이용한 각속도 측정을 통해 고장 진단용 모니터링 시스템을 제안한다. 제안하는 방법은 우선 손상이 발생하지 않은 상태의 블레이드 회전에 대한 각속도 dataset을 구성한다. 블레이드 상태 판별을 위한 dataset 구성이 되었다면, 임의 의 상태에 대한 블레이드가 부착된 풍력 발전기를 일정한 힘을 가해 회전시킨 후 최종적으로 블레이드의 손상 정도 에 따라 발생하는 각속도의 차이를 비교하여 블레이드의 고장 진단에 대해 판단한다. 실험 결과 정상 상태의 블레이 드는 초당 1회 (초당 360°) 이상의 속도로 회전을 진행하며, 손상 상태의 블레이드는 초당 1회 미만의 속도로 회전하 며 표준 편차가 급격히 증가하는 것을 확인할 수 있었다.
Keywords: Wind Turbine, Gyro Sensor, Angular Velocity, Monitoring System
I. 서론
환경 파괴와 기존 에너지원의 고갈로 인해 대체 에 너지 개발의 필요성이 시간이 흐를수록 증대되고 있다.
우리 나라의 경우 국토의 삼면이 바다로 둘러싸여 있으 며 , 70%이상의 지형이 산지로 구성되어 있어 풍력이 많 이 발생한다 [1]. 이러한 환경 요소를 이용하기 위해서 태백산맥과 소백산맥을 중심으로 풍력 발전 단지가 조 성되어 있다. 최근에는 풍력을 이용한 에너지를 생산하 는 기술이 발전됨에 따라, 해상에서 발생하는 바람을 풍 력 발전에 사용하고자 하는 시도가 지속적으로 진행 중 이다 [2]. 이렇듯 대체 에너지원의 하나인 바람을 이용한 풍력 발전 기술이 발전함에 따라, 건설되는 곳의 지형적 특징이 다양해 지며, 발전 시스템의 대형화가 진행 중이 다. 발전 용량의 효율성을 극대화 하기 위해 광범위한 지역에 대형화된 풍력 발전 시스템이 구축됨에 따라, 이 를 모니터링 하기 위한 시스템의 효율성 또한 매우 중 요하다 [3]. 발전 시스템 외부 환경에 노출 된 만큼, 외 부에서 발생되는 물리적 요인 또는 자연 재해 등으로
시스템에 손상이 발생 할 수 있으며, 회전하며 가동하는 발전기에 발생한 부하로 인해, 풍력 발전 시스템의 중추 역할을 하는 블레이드에서 회전이 불가능할 정도의 손 상이 발생 할 수 있다 [4].
풍력 발전 과정에서의 사고예방을 위한 기존 모니 터링 시스템은 발전기에서 고장이 발생 할 수 있는 부 분에 대한 지점의 검출에 따라 다양하게 구분 된다. 구 체적으로 일반적 풍력 발전 모니터링은 기계적 고장에 초점을 맞추는데, 회전하는 상황에서 발생 할 수 있는 질량 불평형과 회전 축 정렬 불량이 주요 고장 원인으 로 판단한다. 이를 이용한 기존 방법 [5]은 기계적 부품 들로 구성이 되어 있는 발전기의 특성에 따라, 작동 시 기계 내부에서 발생하는 물리적 떨림 현상을 검출한다.
이러한 떨림은 일정한 형태의 wavelet을 나타내게 되는
데, 기계적 고장을 분석하는 모니터링 시스템은 풍력 발
전기의 작동 시 정상적인 상태의 wavelet 특성과 질량
불평형 및 회전 축 정렬 불량인 상태의 wavelet 특성을
비교하여 고장 진단에 사용한다. 블레이드 제작 과정에
초음파 센서 또는 광섬유 센서를 삽입하여 블레이드 회
전 시 측정되는 센서의 값을 모니터링 시스템에 제공하 는 방법이 또한 존재한다 [6]. 하지만 이러한 방법은 이 미 가동 중인 기존 시스템에 적용하기 어렵다는 문제점 을 가지며 가격이 높다는 단점이 존재한다. 센서를 이용 한 또 다른 방법으로 모든 블레이드에 대해서 특정 지 점에 자이로 센서를 부착하여 모니터링하는 방법이 있 다 [7]. 블레이드의 tip deflection이 발생하는 지점에 자이 로 센서를 부착, 회전 중인 블레이드에 deflection이 발생 함에 따라 측정되는 자이로 데이터 값을 측정해 모니터 링 시스템에 알리는 방법이다. 이 방법은 기존의 모든 블레이드에 자이로 센서를 부착하여 측정한 데이터를 모니터링 시스템에 이용할 수 있지만, 부착하는 센서의 개수와 측정해야 할 데이터의 양이 많아지는 문제점이 있다 .
본 논문에서는 이러한 상황을 고려하여 기존 풍력 발전 단지 모니터링 시스템에 사용이 가능하면서도 경 제적인 방법으로 자이로 센서를 회전하는 블레이드의 rotor 부위에 부착해 모니터링 시스템에 사용하는 방법 을 제안하고자 한다. 구체적으로 블레이드의 손상 상태 에 따른 풍력 발전기의 회전 상태를 측정하고자, 풍력발 전기의 블레이드가 위치하는 rotor부분의 nose cone(발전 기의 원추형 앞부분)에 자이로 센서를 부착한다. 이 후 손상이 발생하지 않은 블레이드를 부착했을 때의 각속 도의 통계적인 값과 손상이 발생한 블레이드를 부착했 을 때의 각속도 통계적인 값을 비교하여 고장 진단 방
법으로 제안하고자 한다. 이를 통해서 기존 방법들 대비 효율적으로 블레이드 고장 검출이 가능한 방법을 제시 하고자 한다.
II. 본론
제안한 방법의 전체 블록도는 Fig. 2와 같다. 먼저 블레이드가 손상이 가지 않은 정상 상태에 대한 각속도 측정을 진행하여 dataset을 구성한다. 구체적으로 정상 상태의 블레이드를 부착한 풍력 발전기에 일정한 힘을 가해 회전시킨다. 회전하는 풍력 발전기의 rotor에 부착 된 자이로 센서에서 데이터를 측정하며 이를 블루투스 를 이용해 무선 형태로 PC에 송신한다. 자이로 센서 데 이터를 PC에서 수신 받아 각속도를 계산하여, 블레이드 상태를 판별하기 위한 최종 dataset을 구성한다. 블레이 드 상태 판별을 위한 dataset 구성이 되었다면, 실제 모 니터링 시스템에 적용한다. 임의의 상태에 대한 블레이 드가 부착된 풍력 발전기를 일정한 힘을 가해 회전시킨 다 . 이 때 dataset 구성과 마찬가지로 블레이드가 부착된 풍력 발전기의 rotor 중심 부위에 위치한 자이로 센서에 서 블루투스를 이용하여 자이로 센서값을 PC로 송신한 후 분석한다. 계산된 각속도의 평균값이 임계값으로 지 정된 초당 360° 회전을 기준으로 하여 임계점보다 높으 면 블레이드의 상태를 정상으로, 낮으면 블레이드의 상 태를 비정상으로 간주하여 모니터링을 진행하는 것이 가능하다.
A. 자이로센서 기반 블레이드 회전 측정 및 블루투스를 이용한 무선 데이터 수신
회전하는 블레이드의 상태를 모니터링하기 위해 자 이로 센서에서 측정된 데이터를 이용하여, 각속도를 측 정한다 . 각속도를 측정하기 위한 자이로 센서는 GY-521 MPU6050모델을 사용하였다 [8]. 해당 모듈은 자이로 센 서와 가속도계가 합쳐진 모듈 형태로 x, y, z축을 기준으 로 방향에 대해 변화하는 정보를 제공한다. 물체가 회전 운동을 하는 경우 회전축에 대해 반지름이 줄어들게 되 며 , 줄어든 반지름에 대해 각속도가 변화한다. 이 때 회 전 좌표계에는 코리올리 힘이 발생하게 되는데, 실험에 사용되는 MPU6050은 MEMS 기반 자이로 센서로 이를 이용하여 전향력을 측정한다. 구체적으로 다음 수식에
Fig. 2. 제안하는 방법의 전체 블록도.
Fig. 1. 물리적 원인으로 손상된 블레이드.
의해 각 축에 대한 각속도를 계산한다.
Fig. 3에서 자이로 센서 부착 위치를 통해 알 수 있 듯이 센서가 정지 상태일 때, x, y축은 0°부터 시작하지만, z축의 경우 90°를 이루게 된다. 그렇기 때문에 기본 각 도 설정은 x, y, z축이 향하는 방향의 특성에 따라 수식과 같은 형태로 정해진다. 자이로 센서의 특성을 이용해 회 전하는 블레이드에 대한 각속도 정보를 얻기 위해 해당 센서와 아두이노를 Fig. 3와 같이 연결하여 풍력 발전기 의 rotor의 중심 부분에 부착 한다. 아두이노는 마이크로 컨트롤러 기반 오픈 소스 플랫폼 형태의 소프트웨어 개 발 환경을 위한 보드로 자이로 센서를 아두이노에 연결 하여 센서에서 측정된 데이터를 받아 올 수 있다.
센서 부착 지점을 기준으로 제안하는 방법에서는 블레이드의 회전에 따라 센서의 x, y, z축 중 z축을 기준 으로 360° 회전을 하게 된다.
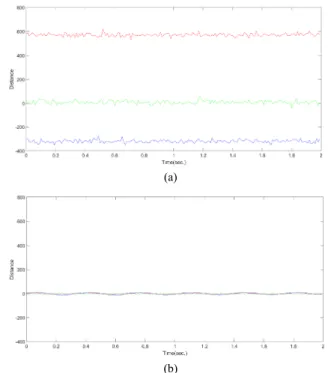
하지만 실험에 사용한 자이로 센서를 발전기에 부 착했을 때, 센서가 부착된 위치의 특성상 데이터 시작점 이 0이 아닌 값에서 시작될 수 있다. 이는 Fig. 4를 통해 확인 가능하다. 센서가 평면에 부착되어 있는 상태라면, 데이터 값의 시작 지점에 대한 값을 고려하지 않아도 되지만, 해당 실험의 경우 풍력 발전기의 rotor 부분에 수직 상태로 센서를 부착 하게 되는데, 실험에 사용된 발전기의 경우 rotor 부분이 하나의 자석 형태로 구성되 어 있기 때문에, 발전기의 대부분의 무게 중심을 차지하 는 구조적 특성이 있다. 또한 자이로 센서의 rotor 중심 부 부착의 경우, 센서의 크기와 부착되는 위치의 특성상 rotor의 가운데 부분에 정확하게 부착하기 어려운 부분 이 있다. 이러한 부분으로 인해 발전기와 기둥이 정확한 수직을 이루지 못하게 되어, 센서의 최초 값에 대한
offset 보정이 필요하다. 우선 발전기가 정지한 상태에서 센서만 부착했을 때의 센서 값은 Fig. 5(a)와 같다. 센서 가 정지된 상태이면 물리적 변화가 전혀 발생하지 않기 때문에 , 기본적으로 자이로 센서의 x, y, z축에 대한 데이 터는 0에 수렴한 형태가 되어야 한다. 하지만, 앞서 언 급했듯 , 센서가 부착된 위치의 특성으로 인해 그림과 같 이 각각의 축에 대해 데이터 값이 측정 되고 있음을 알 수 있다. 이를 보정하기 위해서 현재 상태에서 자이로 센서 데이터 값을 반복하여 측정한다. 측정된 자이로 센 서 데이터의 값이 x축은 790°/s, y축은 0°/s, z축은 –320°/s 에 수렴하는 형태로 나타난다. 해당 데이터를 이용하여 offset 보정을 진행하여 Fig. 5(b)와 같은 형태의 초기 자 이로 센서 값을 지정했으며, 이 때의 offset 값은 x축은 –140°/s, y축은 76°/s, z축은 –5°/s이었다.
자이로 센서 데이터 취득을 위해서 사용한 블루투 스는 무선 통신 방법 중의 하나로, 사용자의 접근성이 용이하고, 데이터 전송 양에 비해 배터리 소모가 적다는 장점이 있다. 회전 축에 대한 정보를 측정하기 위해 Fig.
6과 같이 실험 환경을 구성 하여 자이로 센서에서 측정
Fig. 3. 데이터 무선 통신을 위한 구성.
Fig. 4. 데이터 무선 통신을 위한 구성.
(b)
Fig. 5. 자이로 센서 offset 보정 전 (a)과 후 (b)의 변화.
(a) (b)
Fig. 6. (a) 블루투스 통신의 마스터, 슬레이브 설정. (b) 실험환경에서의 통신 환경 설정.
되는 각속도 값을 송신한 후 해당 데이터를 PC에서 수 신 받아 블레이드의 상태별 각속도 값의 변화 정도를 측정한다. 구체적으로 본 논문에서는 현재 시스템에 적 용할 수 있는 데이터 송/수신이 가능한 HC-05모델 [10]
을 이용한다. 블루투스를 이용한 네트워크에는 Fig. 6과 같이 마스터/슬레이브(Master/Slave)의 설정이 필요하다.
하나의 마스터는 여러 슬레이브와 연결하여 사용이 가 능하며 , 슬레이브 장치는 하나의 마스터와 연결이 가능 하다. 또한 마스터는 슬레이브에 데이터를 전송하는것과 요청하는 것이 가능하며, 슬레이브는 마스터와 데이터 교환이 가능하지만, 슬레이브 간의 통신은 불가능하다.
이러한 블루투스 통신의 특성상 다른 무선 통신인 지그비나 와이파이에 비해 설정의 어려움이 있다. 지그 비의 경우 블루투스와 같은 마스터 한 대와 슬레이브 여러 대의 통신은 물론 여러 마스터와 여러 슬레이브의 통신이 가능한 형태이다. 그럼에도 불구하고 블루투스를 이용하여 실험을 진행하는 것은, 저전력 구동 및 범용성 의 차원에서 본 논문에서 사용된 무선 통신을 블루투스 로 지정하여 진행하였다. 이러한 블루투스 통신의 특성 을 이용하여, 자이로 센서와 함께 부착된 블루투스는 슬 레이브로 설정, PC와 연결된 아두이노 보드에 부착된 블 루투스는 마스터로 설정한 다음, 두 블루투스 간 데이터 를 송/수신이 가능한 형태로 실험 환경을 구성하였다.
이는 Fig. 7과 같다. 두 블루투스 간의 설정이 정상적으 로 되었을 경우, 페어링이 되었다는 신호로 1초 간격으 로 각 블루투스 모듈에서 LED가 점등이 된다. 슬레이브 역할의 블루투스에서는 해당 모듈이 부착된 보드에 함 께 연결된 자이로 센서의 데이터 값을 블레이드가 회전 할 때, 실시간으로 마스터 역할의 블루투스에 해당 데이 터를 전송한다. 이렇게 취득한 데이터는 기존에 측정한 정상상태의 dataset과 비교하여 현재 시스템 상태가 정상 인지를 판단하게 된다.
B. 실험 결과
실험 환경은 Fig. 8과 같으며, 실험에 사용되는 풍력 발전기의 스펙은 Table 1과 같다. Table에서 알 수 있듯 시동 풍속이 1.5 m/s일 때 작동이 가능하며, 본 실험에서 는 원활한 회전을 위해 시동 풍속 이상의 출력이 가능 한 대형 선풍기를 사용하였다. 해당 기기의 경우 풍속이
1.8 m/s로 풍력 발전기를 회전시키기에 충분하다.
풍력 발전기의 블레이드에서 회전 운동이 진행될 때 , 발전기의 블레이드가 부착된 rotor에서는 자이로 센 서를 통해 제공되는 데이터를 블루투스 통신을 통해 PC 로 실시간 전송한다. PC에서 수신된 자이로 센서 데이터 는 MPU6050 모델의 설정값에 맞는 값으로 각속도 계산 을 진행한다. MPU6050은 표현하는 각도의 범위 설정 단 계를 0단계부터 3단계까지 구분하며 해당 실험에서는 가장 넓은 범위인 3단계로 설정하였다. 이는 센서가 부 착된 지점을 기준으로 했을 때, 원 운동의 형태로 회전 하기 때문에 scale range범위 중 가장 넒은 범위의 표현이 3단계에서 가능하기 때문이다. 이에 따라 측정되는 값은 scale range가 넓은 실제 표현되는 각속도의 범위보다 큰 값으로 측정되기 때문에 해당 데이터를 MPU6050에서 제공되는 dataset에 있는 정보에 의해 '16'을 사용하여 측 정된 값을 나눠준다. 이 후 계산된 각속도 값을 이용해 블레이드 상태별 각속도의 값을 분석하며, 계산된 값이 해당 실험에서 측정하고자 하는 각속도 값이다.
실제 가동 중인 풍력 발전기에서 블레이드에 대한 손상은 외부의 요인 없이 발전 과정 중에서 발생하는 부하로 인해 생길 때, 주로 블레이드의 끝부분에 해당하 는 tip부분에서 문제가 발생한다. 이러한 특성에 착안하 여 실험에 사용되는 블레이드의 tip부분부터 rotor에 장 착되는 부분까지 미리 정한 비율로 미리 손상을 시킨다.
Fig. 8. 풍력 발전기 각속도 측정을 위한 실험 환경.
Fig. 9. 정상 상태의 블레이드와 손상된 상태의 블레이드.
Fig. 7. 아두이노 보드 및 자이로 센서로 구성된 실험 환경.
때문에 , 미리 설계한 도면을 바탕으로 블레이드가 회전 이 가능한 범위 안에서 앞서 언급한 비율로 손상을 주 었다 . Fig. 9에서와 같이 전체 블레이드 길이에서 tip 부분 에 해당하는 부분을 일정 비율로 손상시킨다 (본 실험에 서는 15%, 30%, 45%의 비율로 진행). 손상된 블레이드를 부착한 상태에서 풍력 발전기를 가동 시킨 후, 발전기의 rotor부분에 부착한 자이로 센서를 통해 회전하는 상태 에 대한 자이로 센서의 데이터 값을 측정하여 PC로 송 신한다 . PC에서 수신된 자이로 데이터 값에 대한 각속도 계산을 진행해, 정상 상태의 블레이드를 부착했을 때 측 정한 각속도 값과 비교하는 과정을 진행한다.
실험 결과는 Table 2와 같다. 우선 블레이드에 손상 이 발생하지 않은 경우, 즉 정상 상태에서의 각속도는 최저 –375.103°/s, 최고 –384.981°/s이며, 평균 –379.160°/s 속도로 1초에 약 1회 이상의 속도로 회전함을 알 수 있 다. 하지만 블레이드에 손상이 생길 경우 각속도는 정상 상태에 비해 낮게 나타남을 알 수 있다. 블레이드의 15%
가 손상된 경우 평균 각속도는 –351.203°/s, 30%가 손상 된 경우 평균 각속도는 –320.960°/s, 45%가 손상된 경우 평균 각속도는 –304.226°/s의 속도로 회전함을 알 수 있 다 .
바람 에너지를 1.8 m/s의 힘으로 제공할 경우, 블레 이드에 손상이 발생 시 초당 1회 이하의 회전을 하고 있음이 나타난다. Table 2에서 블레이드의 손상에 따른 실 험 데이터 값의 일정한 변화를 확인 할 수 있다. 또한 동일한 바람 에너지를 지속적으로 제공하여 풍력 발전 기가 회전운동을 할 경우, 손상이 없는 상태의 블레이드 에 대한 각속도의 평균값과 손상이 있는 상태의 블레이 드에 대한 각속도의 평균값이 차이가 발생함을 알 수 있으며, 블레이드의 물리적 손상 받은 면적이 약 15%식 증가 할 때마다, 자이로 센서를 통해 측정된 각속도의 값은 계산 결과 평균적으로 24.980°/s 감소함을 알 수 있 다 . 블레이드의 손상 정도가 심할수록 회전의 차이가 발 생함은 각속도값의 표준편차에 의해서도 확인이 가능하 다 . 정상 상태의 경우 각속도에 대한 표준편차 값이 2.571°/s로 발생하지만, 손상 상태가 심화될수록 각속도 의 표준편차 값이 급격히 늘어나 손상 상태가 가장 심 한 55%의 경우 각속도에 대한 표준편차 값이 20.284°/s 로 나타남을 알 수 있다.
Fig. 10는 블레이드 손상 정도에 따른 각속도 측정값 의 평균을 그래프로 나타낸 것이다. 블레이드의 손상 정 도에 따른 각속도 값의 감소 이외, 각 실험 환경에서의 전체 각속도 평균과 각 실험에서의 각속도의 편차 변화
Fig. 10. 블레이드 손상 정도에 따른 각속도 측정 실험결과.
에 대한 특성을 알 수 있다. 블레이드의 손상 정도가 심 할수록 각속도의 측정값이 고르게 분포하지 않음을 확 인 가능하다. Fig. 11는 블레이드 손상 정도에 따른 회전 에 대한 전체 각속도 값을 나타낸 것이다. 보라색은 정 상상태, Fig. 11(a) 연두색은 15% 손상, Fig. 11(b) 검은색은 30% 손상, Fig. 11(c) 빨간색은 45% 손상을 나타낸다. 정 상 상태의 경우인 보라색의 파장 변화는 다른 파장들에 비해 비교적 고른 형태의 파장의 변화, 즉 각속도 값의 변화를 나타내고 있다. 블레이드의 손상 정도가 심화될
수록 , 측정된 각속도 값에 대한 파장의 폭의 변화가 심 해짐을 알 수 있다. 특히 가장 손상이 많이 발생한 빨간 색의 경우 각속도 측정에 대한 파장의 변화가 가장 크 게 발생하고 있으며, 각속도의 평균값도 가장 낮음을 확 인 할 수 있다.
III. 결론
본 논문에서는 바람 에너지를 이용해 회전하는 풍 력 발전 시스템에 대한 고장 발생 모니터링 방법으로 자이로 센서를 이용하는 방법을 제안하였다. 구체적으로 제안한 시스템은 풍력 발전기의 rotor 중심부에 자이로 센서를 부착하여, 무선 통신인 블루투스 모듈을 이용해 각 상황별 측정되는 각속도의 값을 PC의 시리얼 모니터 를 통해 수신 받아 데이터의 특징을 분석하였다. 실험 결과 동일한 바람 에너지를 이용하여 블레이드를 회전 시켰을 때, 정상상태, 15% 손실, 30% 손실, 45% 손실된 상태의 블레이드가 부착된 상태의 각속도를 측정한 결 과 , 손상 정도가 심할수록 블레이드 회전에 대한 각속도 가 낮게 측정되며, 각속도 값의 변화 폭이 더 넓은 파장 으로 발생함을 알 수 있었다.
ACKNOWLEDGEMENT
This research was supported by Korea Electric Power Corporation though Korea Electrical Engineering & Science Research Institute. (grant number : R15XA03-08)
이 논문은 한국전력공사의 재원으로 기초전력연구 원의 2015년 선정 기초 연구개발과제의 지원을 받아 수 행된 것임. (과제번호 : R15XA03-08)
REFERENCES
[1] Moon CHae-Joo, Cheang Eui-Heang, Shin Kwan-Shik, Jung Kwen-Sung and Chang Young-hak, “Feasibility study of wind power generation considering the topographical characteristics of Korea.”, The Korean Solar Energy Society, 28.6, 24-32, 2008.
[2] Kim Ji-Young, Kang Keum-Seok, Oh Ki-Young, Lee Jun- Shin and Ryu Moo-Sung, “Assessment of Possible Resources and Selection of Preparatory Sites for Offshore
Table. 2. 블레이드 손상별 각속도 측정 결과 블레이드 상태
정상 (100%)
블레이드 상태 손실 (85%)
블레이드 상태 손실 (70%)
블레이드 상태 손실 (55%)
각속도 표준편차 각속도 표준편차 각속도 표준편차 각속도 표준편차
Test1 -380.591 2.474 -350.478 3.973 -326.411 10.964 -320.175 20.661
Test2 -384.981 2.415 -352.203 3.892 -326.085 10.983 -310.463 19.997
Test3 -381.908 2.208 -352.869 3.955 -326.408 10.949 -314.051 19.391
Test4 -379.641 2.415 -347.185 4.751 -322.523 11.003 -310.151 19.606
Test5 -380.368 2.318 -349.268 4.051 -319.697 11.291 -303.896 20.251
Test6 -377.024 2.554 -346.620 3.972 -318.264 11.111 -301.331 20.309
Test7 -375.103 3.287 -348.750 4.661 -320.592 11.101 -295.337 20.636
Test8 -377.966 2.428 -351.371 3.986 -317.525 11.334 -297.002 20.465
Test9 -377.482 2.428 -354.568 4.261 -313.947 11.462 -294.458 20.787
Test10 -376.537 2.441 -358.714 4.014 -318.151 11.399 -295.400 20.714 평균( °/s ) -379.160 2.571 -351.203 4.152 -320.960 11.161 -304.226 20.284
(a) 블레이드 15% 손상
(b) 블레이드 30% 손상
(c) 블레이드 45% 손상
Fig. 11. 블레이드 손상 정도에 따른 각속도 측정 실험결과.