A METHOD OF ACHIEVING INCREASED ACCURACY OF SHIP DETECTION FROM MULTI-LOOK SAR IMAGES BY USING
MLCC-CFAR TECHNIQUE
Seong-In Hwang, Shunsuke Taniguchi, Kazuo Ouchi
Department of Computer Science, National Defense Academy 1-10-20, Hashirimizu, Yokosuka, Kanagawa, 239-8686 Japan.
email: g46074, g47034, [email protected]
ABSTRACT ... In the small ship detection experiment in 2006 by PALSAR (Phased Array L-band Synthetic Aperture Radar) on board of ALOS (Advance Land Observing Satellite), we examined 4 ship detection algorithms including MLCC (Multi-Look Cross-Correlation) which is an useful technique to extract the images of ships embedded in heavy sea clutter. The result was that some boats were detected by thresholding MLCC coherence images under favourable conditions. However, it was also found that the threshold method was not suitable to automatically determine the threshold levels corresponding to desired FAR (False Alarm Rate) values. In order to overcome this problem and to improve the accuracy of ship detection by MLCC, we propose a new and simple technique of MLCC-CFAR (or Gamma-CFAR). In this method, CFAR (Constant False Alarm Rate) is applied to inter-look coherence images produced by MLCC. We tested this new algorithm using simulation and PALSAR data, and found substantial improvement in SNR (Signal to Noise Ratio) and FAR in comparison with the threshold method. In this letter, we summarize the MLCC-CFAR algorithm and the experimental results.
KEY WORDS: SAR, Ship detection, SNR, FAR, MLCC-CFAR
1. INTRODUCTION
After the launch of the SEASAT carrying L-band SAR in 1978, a substantial number of ship detection, classification and identification systems by spaceborne and airborne SARs have been reported [1], [2], [3]. Since SAR is a very effective means for monitoring of maritime traffic, fishing activity, ships responsible for ocean oil pollution, and illegally operating ships, in particular, for increasing marine crimes including smuggling and sea jacking by piracy. Among several current ship detection algorithms, MLCC is known to be able to extract the images of ships embedded in sea clutter [4].
During the calibration/validation stage of ALOS- PALSAR in 2006, we conducted an experiment of detecting small fishing boats whose sizes are comparable with the PALSAR resolution cells, with several algorithms including amplitude threshold, MLCC, CFAR (Constant False Alarm Rate) [5], and polarimetric analyses. It was pointed out, in the analysis based on MLCC, that when sub-aperture images contain correlated noise from sea surface, the detection probability decreases due to decreasing SNR (Signal to Noise Ratio) and increasing FAR [6]. Another disadvantage is that the method of thresholding MLCC coherence images was not adequate to automatically determine the threshold levels corresponding to desired FAR. To improve the accuracy of MLCC, we propose, in this paper, a novel method of ship detection by applying CFAR to MLCC coherence
images. The results indicate the increase of SNR up to about 12 dB and the reduction of FAR by 30% on average in comparison with those by the conventional method of thresholding the coherence images.
Section 2 presents the summary of the experiment in 2006 over the Tosa bay, Kochi, Japan. Section 3 is the main body of this paper, where the details of the proposed algorithm and the results of simulation and applications to PALSAR data are presented, followed by conclusions and suggestions for the future study in section 4.
2. SHIP DETECTION EXPERIMNT IN 2006 In the ship detection experiment in 2006, we deployed three types of small fishing boats simultaneously with PALSAR data acquisition in all ascending orbits. The hulls of all boats were made of FRP (Fiber Reinforced Plastics) with attached winches and fishing equipments on deck. The experiment was carried out as follows.
Before the time of PALSAR data acquisition, Type I
boat (Type Ia : 12.0 m, Type Ib : 14.6 m) was positioned
at 1 km away from the shoreline, followed by Type II
(Type IIa : 10.7 m, Type IIb : 11.9 m) and Type III (Type
IIIa : 8.0 m, Type IIIb : 9.2 m) boats separated by 50 m,
where the numbers inside the brackets correspond to the
boats' lengths. Type I boat started to cruise at 10 minutes
before the observation time with the cruising speed of 8
knots (4.12 m/s) in the direction away from the radar in
range direction. Then, Type II boat began to cruise followed by Type III boats with two minutes time interval with the same speed. We carried out the same experiment for 4 different PALSAR observation modes, namely FBS (Fine Beam Single) 21.5 HH, FBS 34.3 HH, FBD (Fine Beam Double) 41.5 HH/HV, and PLR (PoLaRimetric) 20.5 HH/HV/VH/VV. The numbers after the modes indicate the nominal off-nadir angles followed by the polarization modes. In the present work, we used the all 4 SAR data. The readers can view a photo of deployed small boats for instance, the parameters of 4 observation modes and meteorological data [6].
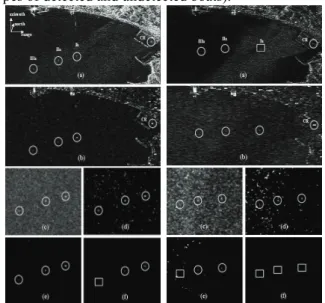
Figure 1 illustrates the results of ship detection from the FBS 34.3 HH (left side (a) to (f)) and FBS 21.5 HH (right side (a) to (f)) images respectively. In both figures, the images (a) and (b) correspond respectively to the amplitude images and the inter-look coherence magnitude images after applying MLCC to the sub- aperture images. In the figures, the image (c) indicates the enlarged coherence images of the area including boats, and the images (d) to (f) show the result after thresholding the coherence images (c) with the threshold parameter N = 2, 4, 6 respectively. The white circles indicate the detected boats; while the white square implies an undetected boat. The threshold value is calculated by
C
T= C + N × σ
c(1) where C is the mean value of coherence magnitude (or correlation coefficient), σ is the standard deviation, and
cN is the parameter of threshold value. The coherence magnitude is computed from
1
2 1
2
1
−
= A A
A
C A (2)
where A and
1A
2are the look-1 and look-2 image amplitudes respectively for the case of two-look processing. In this study, the ensemble average was taken with a moving window of size 9 X 9 pixels.
The both images (d) to (f) in Figures 1 correspond respectively to the cases of N = 2, 4, 6. In the figures, white circles indicate detected boats and white squares imply undetected boats. The image size of each (a) is approximately 3.8 km in range direction (from left to right), and 2.1 km in azimuth direction (from bottom to top).
As shown in Table 1, the SNR value increases with increasing threshold parameter N from 0 to 6 because of reduced surrounding noise levels. This trend is visualized in the both (c)-(f) of Figure 1. However, for the FBS 34.3, the image of type IIIb was also thresholded out as in image (f) when N=6. Similarly, for the FBS 21.5 data, the image of Type IIIa disappeared as in image (e) when N = 4, and the images of all boats were thresholded out when N = 6. Then, the signal amplitude becomes zero with some remaining background noise, and hence SNR also becomes zero. This is the reason for the sudden drops in SNR in Table 1.
Table 2 shows decreasing FAR values as N increases by the threshold method. The numbers inside the brackets are the number of detected boats (see also Table 1 for the types of detected and undetected boats).
Figure 1. The results of ship detection from FBS 34.3 HH and FBS 21.5 HH. Each image is explained in the text.
Table 1. Comparison of SNR [dB] by thresholding the coherence images with different threshold parameters N and the proposed non-adaptive (MLCC-CFAR N) and adaptive (MLCC-CFAR A) methods.
Boat ype N=0 N=2 N=4 N=6 MLCC-CFAR N MLCC-CFRA A
FBS 34.3
Ib 25.6 32.0 59.9 64.7 62.5 66.9 IIa 22.9 29.6 59.5 6.34 61.3 65.7 IIIa 21.6 27.6 51.0 0.0 60.9 65.4 FBS 21.5
Ia 15.6 28.6 43.8 0.0 35.8 38.4 IIa 17.4 29.9 44.1 0.0 31.8 34.8 IIIa 15.6 22.8 0.0 0.0 30.6 31.6
In the same manner as for the SNR analysis, increasing N decreases the FAR values, but at the same time the number of detected boats decreases.
Thus, by applying a simple threshold technique to coherence images, SNR can be increased and FAR can be decreased, resulting in some improvement in detecting small ships. However, it is difficult to automatically determine the threshold parameter which is optimum to individual sub-scenes and there remains the main problem of noise arising from correlated scatters from sea surface. To overcome these problems, i.e., to determine threshold values for desired FAR and to improve the accuracy of MLCC (though background noise is still a problem), we propose a new method applying CFAR to the MLCC coherence images.
Table 2. Comparison of FAR by thresholding the
coherence images with different threshold parameters N
and the proposed non-adaptive (MLCC-CFAR N) and
adaptive (MLCC-CFAR A) methods. The numbers inside
the brackets show the number of detected boats
Data N=2 N=4 N=6 MLCC-CFAR N MLCC-CFRA A FBS 34.3 (3) 2.74E-2 (3) 7.31E-4 (2) 3.56E-4 (3) 4.56E-4 (3) 2.17E-4
FBS 21.5 (3) 3.06E-2 (2) 9.83E-4 (0) 2.50E-4 (3) 1.33E-2 (3) 8.88E-3