碩士學位論文
국내도로면 특성평가를 위한 분류체계 및 성능지수 개발연구
Development of the Classification method and Performance Index for Roughness
Characteristics Evaluation of Domestic Roads
國民大學校 自動車工學專門大學院 崔 壯 漢
2002
국내도로면 특성평가를 위한 분류체계 및 성능지수 개발연구
Development of the Classification method and Performance Index for Roughness Characteristics
Evaluation of Domestic Road
指導敎授 許 昇 鎭
이 論文을 碩士學位 請求論文으로 提出함.
2002年 12月
國民大學校 自動車工學專門大學院
崔 壯 漢
崔壯漢의
碩士學位 請求論文을 認准함.
2002年 12月 日
審査委員長 金 贊 黙 ㊞ 審 査 委 員 任 弘 宰 ㊞ 審 査 委 員 許 昇 鎭 ㊞
國民大學校 自動車工學專門大學院
- i -
목 차
LIST OF FIGURE ··· ⅲ LIST OF TABLES ··· ⅵ 국문요약 ··· ⅶ
1. 서론··· 1
2. 도로면 측정 방법··· 2
2.1 도로면 프로필(road profile)의 개념 ··· 2
2.2 도로면 측정 기본원리 ··· 3
2.3 Accelerometer Established Inertial Profiling Reference (AEIPR) ··· 4
2.4 측정장비사양 ··· 7
3. 도로면 생성을 위한 신호처리··· 8
3.1 도로면생성과 관련된 오차 ··· 8
3.2 도로노면생성알고리즘 ··· 8
3.2.1 평균법(Averaging) ··· 9
3.2.2 적분(Integration) ··· 10
3.2.3 필터링(Filtering) ··· 10
3.2.4 위상보상 (Phase Compensation) ··· 11
3.3 D.I.Filter의 검증 ··· 12
3.3.1 가진실험을 통한 검증 ··· 12
3.4 도로면 생성 알고리즘검증 ··· 15
3.4.1 범프노면 생성 ··· 15
3.4.2 직선로 생성 ··· 18
3.4.3 도로노면생성 오차범위 ··· 19
- ii -
4. 도로면 측정프로그램··· 20
4.1 DAQ Mode ··· 20
4.2 Signal Processing Mode ··· 22
4.3 Evaluation Mode ··· 23
5. 기존의 도로평가 기준··· 24
5.1 IRI (International Roughness Index ) ··· 24
5.1.1 IRI의 기본개념 ··· 24
5.1.2 IRI 산출 과정 ··· 26
5.2 RN (Ride Number) ··· 27
5.2.1 RN의 배경 및 기본개념 ··· 27
5.2.2 RN 산출 과정 ··· 28
5.3 PSD 함수를 이용한 도로면 모델 분류 ··· 29
6. 국내도로 평가를 위한 새로운 분류방법··· 32
6.1 KRC(Korean Road Classicification) ··· 33
6.2 DRI(Detailde Roughness Index) ··· 36
7. 특수로 측정 및 분석··· 38
8. 일반로 측정 및 데이타베이스··· 40
8.1 대상노면 ··· 40
8.2 IRI/RN을 이용한 노면평가 ··· 41
8.3 DRI를 이용한 노면평가 ··· 46
9. 결언··· 49
참고 문헌··· 50
Abstract··· 51
감사의 글··· 52
- iii -
LIST OF FIGURES
Fig. 2.1 Concept of road profile ··· 2
Fig. 2.2 The concept of road profiling by the rod and level method ··· 3
Fig. 2.3 Hardware Configuration of a Accelerometer Establised Inertial Profiling Reference(AEIPR) ··· 4
Fig. 2.4 The Concept of the AEIPR ··· 5
Fig. 2.5 Inertial profiler using laser height sensor ··· 6
(a) Vehicle speed sensor ··· 6
(b) Height sensor and accelerometer ··· 6
Fig. 3.1 Flow chart of road profiling code ··· 9
Fig. 3.2 Frequency Response Function ··· 11
Fig. 3.3 The method of phase compensation ··· 12
Fig. 3.4 Flow Chart of Validation (Test) ··· 13
Fig. 3.5 Compare of cutoff frequency ··· 14
Fig. 3.6(a) Amplitude 40mm, Frequency 0.6Hz ··· 14
Fig. 3.6(b) Amplitude 20mm, Frequency 2Hz ··· 14
Fig. 3.6(c) Amplitude 10mm, Frequency 5Hz ··· 15
Fig. 3.7 Shape of bump road ··· 15
Fig. 3.8 Compare of datum of separating filter ··· 16
Fig. 3.9(a) Signal processing by old algorithm : Backward ··· 16
Fig. 3.9(b) Signal processing by new algorithm : Backward ··· 17
Fig. 3.10(a) Signal processing by old algorithm : Forward ··· 17
Fig. 3.10(b) Signal processing by new algorithm : Forward ··· 18
Fig. 3.11 Braking and acceleration motion on flat road ··· 18
- iv -
Fig. 3.12(a) Error range of bump road ··· 19
Fig. 3.12(b) Error range of flat road ··· 19
Fig. 4.1 Flow Chart of the DAQ Mode ··· 21
Fig. 4.2 Window of the DAQ module ··· 21
Fig. 4.3 Flow chart of the signal processing ··· 22
Fig. 4.4 Window of the signal processing module ··· 22
Fig. 4.5 Flow Chat of the Evaluation Mode ··· 23
Fig. 4.6 Window of the evaluation module ··· 23
Fig. 5.1 Concept of the IRI ··· 25
Fig. 5.2 Frequency response of the IRI filter (at 35km/h) ··· 25
Fig. 5.3 Road evaluation chart using IRI index ··· 26
Fig. 5.4 IRI calculation process ··· 27
Fig. 5.5 Correlation between RN and MPR ··· 28
Fig. 5.6 RN calculation process ··· 29
Fig. 5.7 Classification of road surface roughness by ISO ··· 30
Fig. 6.1 KRC-classification of road surface roughness by ISO ··· 34
Fig. 6.2 Domestic road evaluation using ISO ··· 35
Fig. 6.3 Domestic road evaluation using KRC ··· 35
Fig. 6.4 DRI calculation process ··· 37
Fig. 7(a) Belgian road profile and PSD ··· 38
Fig. 7(b) Washboard road profile and PSD ··· 39
Fig. 7(c) Gravel road profile and PSD ··· 39
Fig. 8.1 Measured roads ··· 41
Fig. 8.2 IRI/RN evaluation of roads ··· 41
Fig. 8.3 IRI evaluation of highway roads ··· 42
- v -
Fig. 8.4 IRI evaluation of national roads ··· 42
Fig. 8.5 IRI evaluation of local roads ··· 43
Fig. 8.6 IRI evaluation of seoul roads ··· 43
Fig. 8.7 RN evaluation of highway roads ··· 44
Fig. 8.8 RN evaluation of national roads ··· 44
Fig. 8.9 RN evaluation of local roads ··· 45
Fig. 8.10 RN evaluation of seoul roads ··· 45
Fig. 8.11 DRI evaluation of roads ··· 46
Fig. 8.12 DRI evaluation of highway roads ··· 46
Fig. 8.13 DRI evaluation of national roads ··· 47
Fig. 8.14 DRI evaluation of local roads ··· 47
Fig. 8.15 DRI evaluation of seoul roads ··· 48
- vi -
LIST OF TABLES
Table. 2.1 Specification of sensor ··· 12
Table. 5.1 Classification of road roughness proposed by ISO ··· 31
Table. 6.1 Classification of road roughness proposed by KRC ··· 34
Table. 8.1 List of measured roads ··· 40
- vii -
국문요약
도로면 측정에 관한 기술은 1960년대부터 도로의 성능 및 상황을 조사 분석하기 위해 개발되어 왔다. 개발 초기에는 토목이나 건설공사에서 이용하는 Rod 및 Level 법에 의한 정적인 방법을 이용하여 측정되어 왔으나, 이 방법은 시간과 인 력 소요가 크며 고주파수 영역을 측정하기에는 어려움이 있었다. 따라서 동적인 방법으로 고속의 노면 측정 방법들이 개발되었는데, 그중의 대표적인 방법으로서 GM에서 개발된 Accelerometer Established Inertial Profiling Reference(AEIPR) 를 들 수 있다. 이 방법은 차량에 별개의 센서를 장착한 측정 보조바퀴를 부착하 는 접촉식과 Laser 센서를 이용한 비접촉식 거리측정 방법으로 구별된다. 본 연 구에서는 측정을 위해서는 AEIPR 비접촉식 방법을 이용하였으며 도로면 특성평가 를 위해 IRI(International Roughness Index), RN(Ride Number), ISO 규격과 같은 국제적으로 통용되고 있는 지수를 적용하였다. 측정노면은 측정시스템 및 분석프 로그램의 검증을 위해 자동차부품연구원내의 아스팔트 및 특수로를 이용하였으며, 국내도로 데이터베이스 구축을 위해 고속국도, 일반국도, 지방로, 서울시내주요도 로, 및 비포장로를 측정하였다. 또한 국내도로를 분석하는 과정에서 국내도로의 특 성을 좀더 정확히 나타낼 수 있는 분류기준 및 지수의 필요성을 발견하였으며, 이 에 따라 본 연구에서는 차량 현가부품운동의 주요 가진원이 되는 신호영역을 이용 한 분류기준 및 노면의 포장상태 및 세부적인 거칠기를 평가할 수 있는 분류기준 을 제시하고자 한다. 또한 데이터베이스 S/W를 제작하여 본 연구결과의 활용 및 관리의 편의성을 높이고자 한다.
- 1 -
1. 서 론
도로면 측정에 관한 기술은 1960년대부터 도로의 성능 및 상황을 조사 분석하 기 위해 개발되어 왔다. 개발 초기에는 토목이나 건설공사에서 이용하는 Rod 및 Level 법에 의한 정적인 방법을 이용하여 측정되어 왔으나, 이 방법은 시간과 인력 소요가 크며 고주파수 영역을 측정하기에는 어려움이 있었다. 따라서 동적 인 방법으로 고속의 노면 측정 방법들이 개발되었는데, 그중의 대표적인 방법으로 서 GM에서 개발된 Accelerometer Established Inertial Profiling Reference(AEIPR)를 들 수 있다. 이 방법은 차량에 별개의 센서를 장착한 측정 보조바퀴를 부착하는 접촉식과 Laser 센서를 이용한 비접촉식 거리측정 방법으로 구별된다. 현재 국 내에서의 도로 노면 측정기술 개발과 평가 데이터베이스 구축은 미미한 실정이 다. 따라서, 이에 관련된 기술개발이 절실히 요구되고 있는 바, 본 연구에서는 도 로면 측정 신호의 처리 및 체계적인 분석 평가를 위한 통합 프로그램인 ‘Road Profiler'를 개발하고자 한다. 측정방법으로는 동적인 도로면 측정방법인 AEIPR 를 응용하며, 도로면 특성평가 지수로서는 IRI(International Roughness Index), RN(Ride Number), ISO 도로면 특성 표기법 등의 평가 방법을 적용하고자 한다.
내구시험용으로 사용되는 벨지안로, 자갈길로, 빨래판로 등과 같은 특수로와 국 내 일부 고속도로, 국도, 지방로, 시내로, 비포장로를 측정하여 데이터베이스를 구 축하고 분석하고자 한다.
- 2 -
2. 도로면 측정 방법
2.1 도로면 프로필(road profile)의 개념
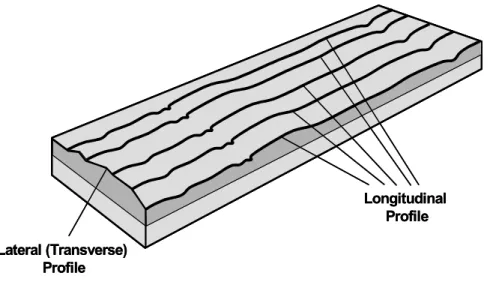
도로 노면 프로필이란 2차원 또는 3차원 도로 노면의 형상으로써, 어떤 가상의 선을 따라 움직이는 수직 방향의 변위 데이터의 집합을 의미한다. Fig. 2.1은 임 의의 도로상에서의 도로 노면 프로필의 개념도를 보이고 있다. 도로면을 구성하 는 요소로써 일반적으로 종방향(longitudinal direction)의 경사도(grade or slope), 거칠기(rouhgness), 그리고 texture등이 있으며, 횡방향(transverse direction)으로 는 횡측경사(superelevation and crown), rutting으로 정의하고 있다.
Longitudinal Profile Lateral (Transverse)
Profile
Longitudinal Profile Lateral (Transverse)
Profile
Fig. 2.1 Concept of road profile
- 3 -
2.2 도로면 측정 기본원리
도로면 측정의 기본원리는 Fig. 2.2에서와 같이 정적 측정방법인 Rod and Level법을 통하여 쉽게 이해할 수 있다. 도로 노면을 측정하기 위해 필요한 세 가 지 요소는 다음과 같다.
- 기준 높이(reference elevation)
- 기준 높이와의 상대적인 노면 수직 변위(height relative to the reference) - 가상의 선을 따른 거리 데이터(longitudinal distance)
Fig. 2.2에서 볼 수 있듯이 우선 기준점의 높이를 측정한 후, Rod를 이용하여 기준점으로부터 일정한 간격의 거리를 이동하며 Rod의 높이를 측정한다. 기준높 이와 Rod의 측정높이의 차에 의하여 노면 수직 변위를 구할 수 있는데, 이것이 곧 도로면이 된다.
1. Reference Elevation = Instrument Height
2. Height Relative to Reference = Rod
3. Longitudinal Distance Reference Point
Fig. 2.2 The concept of road profiling by the rod and level method
- 4 -
2.3 Accelerometer Established Inertial Profiling Reference (AEIPR)
도로면을 측정하는 방법은 크게 정적인 방법과 동적인 방법이 있다. 전자의 경 우는 일반적으로 Rod and Level, Dipstick, 그리고 Straightedge을 이용한 방법 등이 있다. 그러나 이러한 정적인 방법은 기준점이 고정된 상태에서 상대 변위를 한점씩 옮겨가며 측정하는 방법으로 인력과 시간이 많이 요구되는 단점이 있다.
또한 노면 측정결과를 주파수 영역에서 분석하고자 할 때 고주파영역을 측정할 수 없는 한계를 가지고 있다. 따라서 차량을 실제 고속으로 주행시키는 상태에서 노면을 측정할 수 있는 방법이 필요하게 되었고, 1966년 GMCRL(General Motors Corporation Research Laboratory) 에 의해 Dynamic Road Profiling Device(DRPD)인 Accelerometer Established Inertial Profiling Reference(AEIPR)가 개발되었다. Fig. 2.3은 AEIPR의 방법을 보여주고 있다. 시 스템 구성은 가속도계(accelerometer)와 변위계(height sensor) 그리고 속도계 (vehicle velocity sensor)로 구성되며 컴퓨터의 신호처리 과정을 거쳐 도로면이 생성된다.
H e ig h t
F ro m L a s e r H e ig h t S e n s o r F ro m A c c e le ro m e te r
F ro m S p e e d S e n s o r
H D W ith C o m p u te r
L o w P a s s
F ilte r s A /D P ro file C o m p u ta tio n
H e ig h t
F ro m L a s e r H e ig h t S e n s o r F ro m A c c e le ro m e te r
F ro m S p e e d S e n s o r
H D W ith C o m p u te r
L o w P a s s
F ilte r s A /D P ro file C o m p u ta tio n
Fig. 2.3 Hardware configuration of a accelerometer established inertial profiling reference(AEIPR)
- 5 -
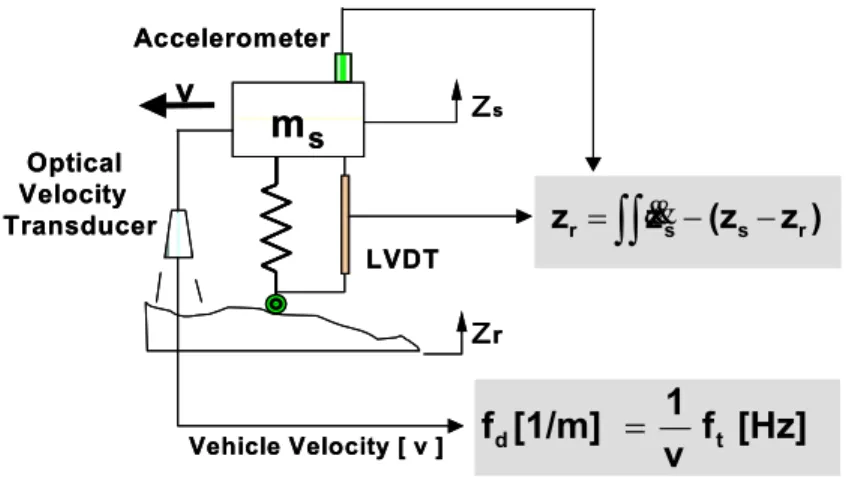
Fig. 2.4는 AEIPR의 개념을 보다 구체적으로 표현하였다. Fig. 2.4에서 보이고 있는 것은 차량에 별개의 휠을 장착하여 노면을 측정하는 방법이다. 노면의 미세 한 부분까지 측정할 수 있을 정도로 충분히 작은 휠을 이용하여, 휠과 차량사이 의 상대 변위를 변위센서(LVDT)로 측정하며, 기준변위는 변위 센서 윗부분에 장 착된 가속도 센서를 이용한다. Fig. 2.4의 오른편에 보이는 수식은 도로면
zr 의 계산식을 보이고 있다. 측정거리는 설치된 속도센서를 이용하여 측정한다.
m
sVehicle Velocity [ v ]
zs
LVDT Accelerometer
) z (z z
zr =
∫∫
&&s− s− r zrv
Optical Velocity Transducer
[Hz]
v f [1/m] 1
fd = t
m
sVehicle Velocity [ v ]
zs
LVDT Accelerometer
) z (z z
zr =
∫∫
&&s− s− r zrv
Optical Velocity Transducer
[Hz]
v f [1/m] 1
fd = t
Fig. 2.4 The Concept of the AEIPR
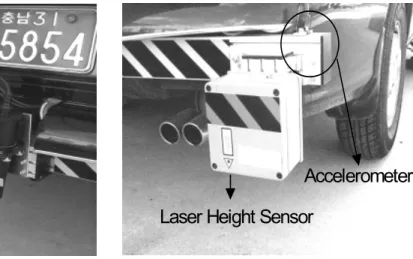
Fig. 2.5는 AEIPR방법을 이용하여 실제 실험용차량에 적용한 그림을 보여주고 있다.
- 6 -
(a) Vehicle speed sensor (b) Height sensor and accelerometer
Laser Height Sensor
Accelerometer
Fig. 2.5 Inertial profiler using laser height sensor
Fig. 2.5(a)는 차량의 후부에 장착된 속도 센서를 보여주고 있고, Fig. 2.5(b)는 비접촉식 Laser 변위계와 가속도계를 보여주고 있다. 비접촉식 센서의 부착을 통 해 차량을 고속으로 달리면서 측정 가능케 하였다.
- 7 -
2.4 측정장비사양
Table. 2.1 Specification of sensor
Sensor Name Specification
Laser Type Height Sensor
․Model: MICRO-EPSILON,inc.
ILD 2000-200
․Measuring Range : ±100mm
․Resolution : 10μm
․Sampling Rate : 10kHz
Accelerometer
․Model: B&K 4384
․MeasuringRange :0.1-12kHz
․Resolution : 0.998 pc/ms-2
Optical Speedmeter
․Model: CORREVIT-1, sensor
․MeasuringRange : 3~350km/h
․Sensitivity : 35(km/h)/V
․Linearity : ±0.2%
- 11 -
평탄함을 알 수 있다. 반면 Chebyshev 필터는 통과 대역에서 맥동이 존재하여 주파수 응답이 고르지 못함을 확인 한 바, 본 알고리즘에서는 이에 근거하여 Butter-worth filter를 사용하였다.
0 0.2 0.4 0.6 0.8 1 1.2
0 0.5 1 1.5 2 2.5 3 3.5 4
Frequency[Hz]
Amplitude
Butter-worth 8 hole High-Pass Filter Chebyshev 8th High-Pass Filter
Fig. 3.2 Frequency Response Function
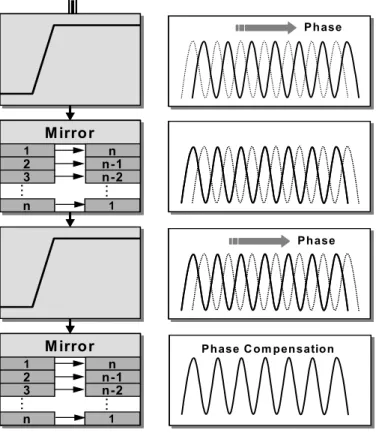
3.2.4 위상보상 (Phase Compensation)
고주파 통과 필터(high-pass filter)를 통과시킨 데이터는 필연적으로 위상변화 를 일으킨다. 본 연구에서는 고주파 통과 필터의 위상변화를 역이용하여 위상보 상을 꾀하고자 했다. Fig. 3.4는 적용된 방법을 보여주고 있다. 위상 리드(phase lead)가 발생한 데이터를 역배열 시키면 위상방향이 반대가 되고, 이를 다시 같은 주파수 대역의 고주파 통과 필터를 통과시켜 같은 양의 위상 리드(phase lead)를 발생케 함으로써 위상 보상(phase compensation)이 이루어 질 수 있다.
- 12 - M irror
1 23
n-1n .. n-2
. ...
n 1
M irror
1 23
n-1n .. n-2
. ...
n 1
Phase
Phase
Phase C om pensation
M irror
1 23
n-1n .. n-2
. ...
n 1
M irror
1 23
n-1n .. n-2
. ...
n 1
Phase
Phase
M irror
1 23
n-1n .. n-2
. ...
n 1
M irror
1 23
n-1n .. n-2
. ...
n 1
M irror
1 23
n-1n .. n-2
. ...
n 1
M irror
1 23
n-1n .. n-2
. ...
n 1
Phase
Phase
Phase C om pensation
Fig. 3.3 The method of phase compensation
3.3 D.I.Filter의 검증
3.2절에서 제시된 방법을 토대로 본 장에서는 적분알고리즘의 검증을 위한 그 방법과 결과를 제시하고자 한다.
3.3.1 가진실험을 통한 검증
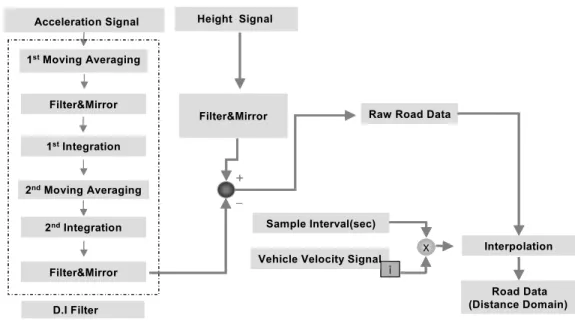
D.I.Filter(Double Integration Filter)의 타당성을 검증하기 위해 이를 보다 구 체화하기 위해 가진기에 가속도계와 LVDT를 장착하고 가진 실험을 수행하였다.
Fig. 3.4는 본 실험의 방법을 보여주고 있다. 가진기에 일정한 주파수로 변위를
- 13 -
주고, 가속도로부터 받아지는 신호를 D.I.Filter에 통과시켜 LVDT 신호와 비교하 는 방법이다.
Acceleration Signal 1stMoving Averaging
1stIntegration
2ndIntegration 2ndMoving Averaging
Raw Road Data
Road Data (Distance Domain) Height Signal
Vehicle Velocity Signal Sample Interval(sec)
i
x Interpolation
+ - Filter&Mirror
Filter&Mirror
Filter&Mirror
D.I Filter Acceleration Signal 1stMoving Averaging
1stIntegration
2ndIntegration 2ndMoving Averaging
Raw Road Data
Road Data (Distance Domain) Height Signal
Vehicle Velocity Signal Sample Interval(sec)
i
x Interpolation
+ - Filter&Mirror
Filter&Mirror
Filter&Mirror
D.I Filter
Fig. 3.4 Flow Chart of Validation (Test)
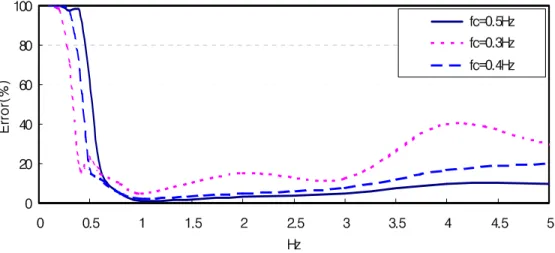
Fig. 3.5은 고주파 통과 필터의 설정주파수에 따른 오차를 비교한 결과를 보여 주고 있다. 여기서 오차는 가진 변위에서 D.I.Filter를 통해 얻은 변위를 뺀 값이 다. 설정주파수를 0.5Hz 로 했을 때 가장 작은 오차를 보였다. 가진실험 결과 Fig.
3.6과 같이 D.I.Filter를 통과한 가속도신호 적분값과 가진변위 신호가 0.6Hz 이상 에서 10%이하로 만족스런 결과를 보여주고 있다.
- 14 - 0
20 40 60 80 100
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Hz
Error(%)
fc=0.5Hz fc=0.3Hz fc=0.4Hz
Fig. 3.5 Compare of cutoff frequency
Fig. 3.6(a) Amplitude 40mm, Frequency 0.6Hz
Fig. 3.6(b) Amplitude 20mm, Frequency 2Hz
- 15 -
Fig. 3.6(c) Amplitude 10mm, Frequency 5Hz
3.4 도로면 생성 알고리즘검증
3.3절에서 검증된 적분 알고리즘(D.I.Filter)과 도로면 생성원리를 토대로 도로 면 생성 알고리즘(Road Profiling Code)을 완성하였고, 이를 증명하기 위한 실험 을 수행하였다. 범프노면과 직선 노면측정 실험을 하였고, 이를 실제 노면형상과 비교하였다.
3.4.1 범프노면 생성
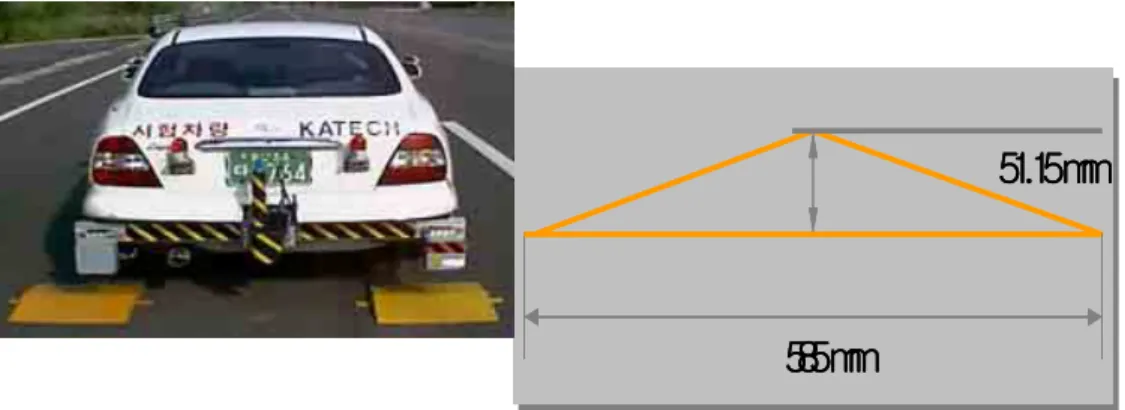
범프노면의 측정을 위해 Fig. 3.7과 같이 장비를 세팅하고 범프형상의 철판 위 를 진행하면서 측정하였다.
585 mm
51.15 mm
585 mm
51.15 mm
585 mm
51.15 mm
Fig. 3.7 Shape of bump road
- 16 -
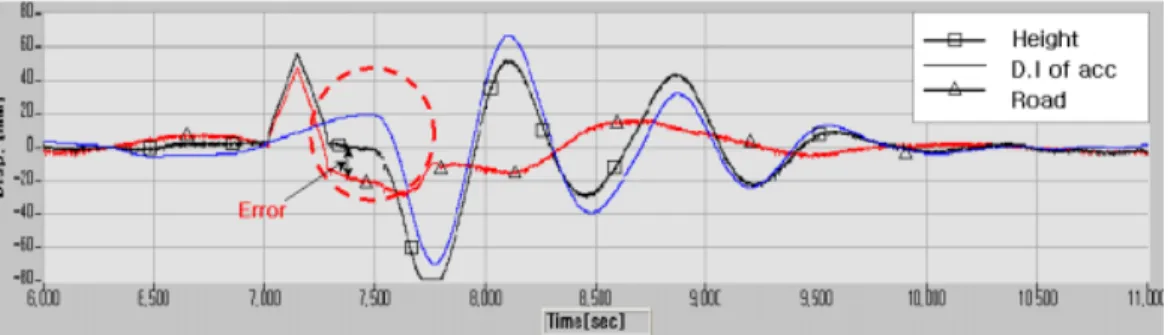
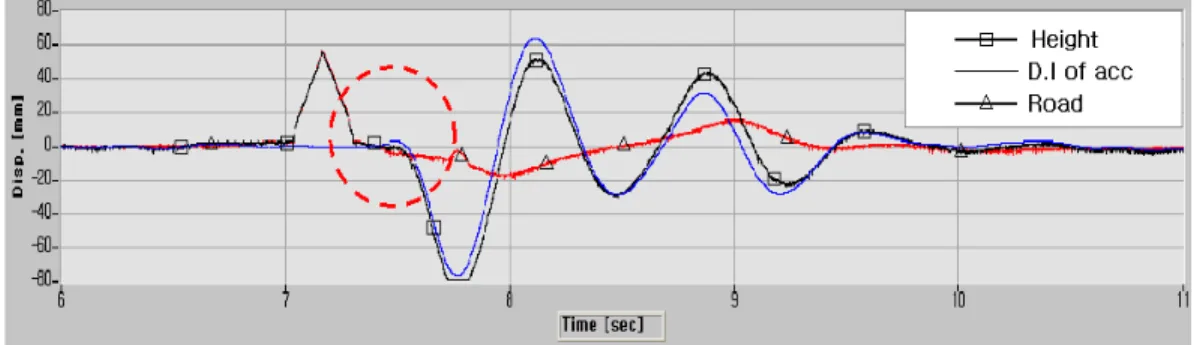
Fig. 3.9은 8km/h 정도로 후진을 하면서 측정한 데이터를 신호 처리하여 얻은 결과이다. Fig. 3.9(a)와 Fig. 3.9(b)를 비교하면 기존 알고리즘보다 이번에 개발한 알고리즘이 오차를 상당히 줄인 것을 알 수 있다. 새로 개발된 알고리즘에는 Fig.
3.1과 같이 2차적분 후에 필터를 구간별로 나누어 다시 통과시키는데 그 나누는 기준은 Fig. 3.8에서 비교해본 결과 5g/s을 선정하는 것이 가장 좋은 결과를 얻을 수 있었다.
2 2.5 3 3.5 4
3g/s 4g/s 5g/s 6g/s
Datum
Error[mm]
Fig. 3.8 Compare of datum of separating filter
Fig. 3.9(a) Signal processing by old algorithm : Backward
- 17 -
Fig. 3.9(b) Signal processing by new algorithm : Backward
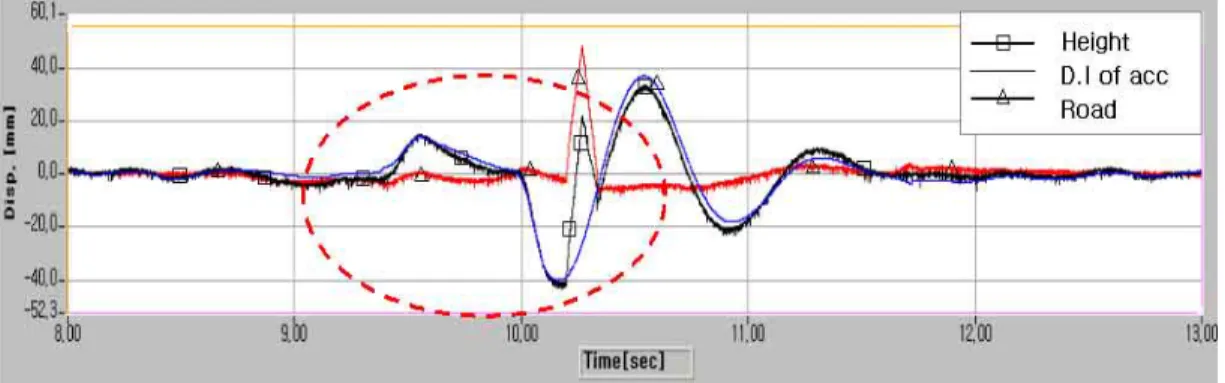
Fig. 3.10은 20km/h 정도로 전진을 하면서 측정한 데이터를 신호 처리하여 얻 은 결과이다. Fig. 3.10(a)와 Fig. 3.10(b)를 비교하면 후진 측정과 마찬가지로 기 존 알고리즘보다 새로 개선한 알고리즘이 오차를 상당히 줄인 것을 알 수 있다.
특히 범프전후의 움푹 패인현상이 많이 사라지고 평탄노면을 유사하게 구현하는 것을 볼 수 있다.
Fig. 3.10(a) Signal processing by old algorithm : Forward
- 18 -
Fig. 3.10(b) Signal processing by new algorithm : Forward
3.4.2 직선로 생성
직선로 주행중에 제동 및 가속을 함으로써 발생되는 피칭운동에 대한 영향에 대해서도 실험하였다. 그 결과를 Fig. 3.11에 나타내었다. 차체의 피칭운동을 제거 하고 평탄노면을 유사하게 구현하는 것을 볼 수 있다.
Fig. 3.11 Braking and acceleration motion on flat road
Braking Braking
Acceleration
- 19 -
3.4.3 도로노면생성 오차범위
3.4.1절과 3.4.2절에서 검증한 결과을 토대로 개발된 도로노면측정프로그램의 오차범위를 설정하였다. Fig. 3.12(a)와 같이 범프노면과 같은 특수로는 오차가
±10%이내이고, Fig. 3.12(b)와 같이 직선노면은 ±5mm 이내로 설정하였다.
Fig. 3.12(a) Error range of bump road
Fig. 3.12(b) Error range of flat road
- 20 -
4. 도로면 측정프로그램
3절에서와 같이 개발된 도로면 생성 알고리즘을 바탕으로 도로면 측정 S/W인
‘Road Profiler'를 완성하였다. 프로그램은 NI(National Instrument)사의 C 언어 에 바탕을 둔 LabWindows 4.01로 작성하였다. 프로그램은 단일 및 양쪽 트랙을 측정 분석 할 수 있도록 하였고, 각각 DAQ Module, Signal Processing Module, Evaluation Module로 크게 나누어져 있다. 프로그램에 메뉴바와 대화상자를 추 가하는 등 사용자 환경를 개선하여 완성도 및 상품성을 높였다.
4.1 DAQ Mode
DAQ Mode는 NI사의 16 채널, 250 ksamples/sec의 속도를 가진 AI-16E-4 A/D Board를 바탕으로 프로그램을 작성하였고, 초기설정을 5000 samples/sec(
1채널 당 1000 samples/s ) 의 데이터 수집 속도로 하여 노면 신호를 고속 주행 중에도 충분히 받을 수 있도록 하였다. 시스템에 따라 단일 혹은 양쪽노면을 측 정 할 수 있도록 프로그램에 적용하였다. Fig. 4.1은 DAQ Mode의 Flow Chart 보여주고 있고, Fig. 4.2는 DAQ 화면구성과 그 실행 예를 보여주고 있다.
- 21 -
1. DAQ Mode
Single?
Setting : -Sampling Rate -Channel -Sensor etc.
Ch 0 Ch 1 Ch 2 Velocity Meter
Acquire?
Idling Save (One Track Format) Ch 0 Ch 1 Ch 2 Velocity Meter
Ch 3
Acquire?
Idling Save (Two Track Format) Setting :
-Sampling Rate -Channel -Sensor etc.
yes
no
no yes no yes
Ch 4 Laser Height Sensor
Accelerometer 1. DAQ Mode
1. DAQ Mode
Single?
Setting : -Sampling Rate -Channel -Sensor etc.
Ch 0 Ch 1 Ch 2 Velocity Meter
Acquire?
Idling
Idling Save (One Track Format) Ch 0 Ch 1 Ch 2 Velocity Meter
Ch 3
Acquire?
Idling
Idling Save (Two Track Format) Setting :
-Sampling Rate -Channel -Sensor etc.
yes
no
no yes no yes
Ch 4 Laser Height Sensor
Accelerometer
Fig. 4.1 Flow Chart of the DAQ Mode
Fig. 4.2 Window of the DAQ module
- 22 -
4.2 Signal Processing Mode
Signal Processing Mode는 DAQ Mode로부터 얻어진 신호들을 신호처리과정 을 거쳐 도로면을 생성하는 과정이다. Fig. 4.3는 본 프로그램에 적용된 Signal Processing Mode의 Flow Chart를 보여주고 있다. Fig. 4.4는 전체 프로그램의 구 성 및 실행예를 보여주고 있다.
2. Signal Processing M ode
S ingle?
O pen (Single Form at) O pen (Double Form at)
Save Road Data (O ne Track) Save Road Data (Tw o Track) Road Profiling Code (O ne Track) Road Profiling Code (Tw o Track)
yes no 2. Signal Processing M ode
S ingle?
O pen (Single Form at) O pen (Double Form at)
Save Road Data (O ne Track) Save Road Data (Tw o Track) Road Profiling Code (O ne Track) Road Profiling Code (Tw o Track)
yes no
Fig. 4.3 Flow chart of the signal processing
Fig. 4.4 Window of the signal processing module
- 23 -
4.3 Evaluation Mode
4.2절에서 생성된 도로면을 PSD(ISO Criteria), IRI, RN 통해 평가 할 수 있도 록 프로그램을 작성하였다. Fig. 4.5는 Evaluation Mode의 Flow Chart 보여주고 있고, Fig. 4.6는 Evaluation Mode 화면구성과 그 실행 예를 보여주고 있다.
3. Evaluation Mode Single?
Evaluation Code ( One Track ) Evaluation Code ( Two Track )
IRI, RN, PSD IRI, RN, PSD
Load Road Data (One Track) Load Road Data (Two Track) yes no
3. Evaluation Mode Single?
Evaluation Code ( One Track )
Evaluation Code ( One Track ) Evaluation Code ( Two Track )Evaluation Code ( Two Track )
IRI, RN, PSD IRI, RN, PSD
Load Road Data (One Track) Load Road Data (Two Track) yes no
Fig. 4.5 Flow Chat of the Evaluation Mode
Fig. 4.6 Window of the evaluation module
- 24 -
5. 기존의 도로평가 기준
현재까지 연구 결과로 도로 노면을 규정하고 평가하기 위한 다양한 접근 방법 이 제시되어 왔으며 이에 따라 국제적으로 여러 평가기준이 개발되었다. 국내 노면 성능과 현황을 분석 및 평가하는 프로그램 개발을 위해, 본 절에서는 연구 되어 온 각종 국제 규격을 통하여 노면을 평가하는 방법을 제시하고자 한다.
5.1 IRI (International Roughness Index )
5.1.1 IRI의 기본개념
1960년대부터 RTRRMS(Reponse-Type Road Roughness Measuring System)와 같은 응답형 노면측정기를 이용하는 장비를 이용하여 측정한 노면의 성능지수에 관한 연구가 이루어져왔다. 그러나 측정 차량에 따라 다른 성능 지수값을 갖는 관계로 성능지수 표준화에 대한 필요성이 대두되었다. 따라서 1982년, World Bank에서 시행한 노면데이터 분석과정에서부터 표준화에 대한 연구가 시작되었 는데, 도로면 형태와 거칠기의 변화를 대표할 수 있는 값을 산출하기 위해 기준 이 되는 1/4차량 필터 모델을 제안하여 표준화된 물성치들을 정립하였다. Fig.
6.1 이에 이용된 수학적 모델은 NCHRP (National Cooperative Highway Research Program)에서 제안된 ‘Golden Car’라고 불리며 이를 바탕으로 결정된 노면 성능지수를 IRI(International Roughness Index)라 한다. 현재 1/4차량 모델 을 이용한 IRI는 도로면의 파손정도를 파악하는 데에 많이 쓰이는 노면 성능지수 이다.
- 25 -
Bod y M ass
Axle M ass Suspension Spring and D am per
Tire Spring M easured
Profile IR I
C om puter Algorithm
Bod y M ass
Axle M ass Suspension Spring and D am per
Tire Spring M easured
Profile IR I
C om puter Algorithm
Fig. 5.1 Concept of the IRI
Fig. 6.2는 속도가 32km/h일 때 IRI 필터의 주파수(wave number)에 따른 응 답특성으로 1/4차량의 응답특성과 같은 형상을 갖고 있다. Fig. 4.3은 도로의 보 수 여부를 판단할수 있는 기준으로 각 도로의 조건에 따른 IRI 범위를 정의하고 있다.
G a in f o r P r o file S lo p e |H ( v )|
0 .1 1 1
IR I
W a v e N u m b e r (c y c le s / m ) 0 .0 1
0 1 2
3 5 k m /h G a in f o r P r o file S lo p e |H ( v )|
0 .1 1 1
IR I
W a v e N u m b e r (c y c le s / m ) 0 .0 1
0 1 2
3 5 k m /h
Fig. 5.2 Frequency response of the IRI filter (at 35km/h)
- 26 - Erosion gulleys and
deep depressions
Frequent shallow depressions,some deep
Frequent minor depressions Surface interfections
0= Absolute
perfection Airport runways and superhighways
New pavements
Older pavements Maintained unpavement roads
Damaged pavements
Rough unpaved roads
50 km/h (31 mph)
60 km/h (37 mph)
80 km/h (50 mph)
100 km/h (60 mph) 30 km/h (19 mph)
Speed of normal use (m/km)(in/mi)IRI
100 600 500 400 300 200 700 1200 1100 1000 900 800
0 2 4 6 8 10 12 14 16 18 20
Fig. 5.3 Road evaluation chart using IRI index
5.1.2 IRI 산출 과정
6.1.1절에서 언급한 바와 같이 IRI는 1/4차량 필터를 통과한 노면데이터의 절대 값의 평균값으로 정의할 수 있다. Fig. 6.4는 IRI를 연산하는 과정을 보이고 있으 며, 1/4 차량 모델에 적용된 특성치는 K1=653 1/sec2, K2=63.3 1/sec2, U=0.150, C=6.00 1/sec 이다. 1/4차량을 통과한 데이터는 식6.1과정을 거쳐 IRI 결과를 산 출해 낸다.
- 27 -
Road Profile Qcar Filter (IRI)
- Filter Coefficients K1=653 sec-2 , K2=63.3 sec-2, U=0.150 , C=6.00sec-1 Moving Average
Base Length =250mm
ARS
Profile Index(PI) PI (m/km,in/mi)
IRI 0
IRI
1 2 Road Profile
Road Profile Qcar Filter (IRI)
- Filter Coefficients K1=653 sec-2 , K2=63.3 sec-2, U=0.150 , C=6.00sec-1 Moving Average
Base Length =250mm Moving Average Base Length =250mm
ARS
Profile Index(PI) ARS
Profile Index(PI) PI (m/km,in/mi)
IRI
PI (m/km,in/mi)
IRI 0
IRI
1 2
0 IRI
1 2
Fig. 5.4 IRI calculation process
(식 5.1)
IRI =∑|Z( i)|
5.2 RN (Ride Number)
5.2.1 RN의 배경 및 기본개념
RN(Ride Number)는 도로 노면의 거칠기가 승차감에 영향을 주는 정도를 성능 지수형태로 나타낸 것이다. 1980년대부터 NCHRP에서는 노면의 거칠기와 승차 감도에 미치는 영향을 분석하기 위해 미국의 여러 주에서 5년 간격으로 도로 주 행의 결과를 차량 탑승자를 대상으로 설문조사 및 통계작업을 통하여 0에서 5사 이의 범위를 갖는 성능지수를 구하였는데 이것이 MPR(Mean Panel Rating)이다.
그러나 MPR은 설문조사 결과를 통하여 얻어지는 것이므로 시간과 비용면에서 상당히 비효율적이다. 따라서 MPR에 근접한 결과를 노면 데이터를 이용해 수학 적으로 추출하기 위한 연구가 진행되었고 이에 의해 RN(Ride Number)가 개발되 었다. Fig. 4.5는 MPR과 RN의 관계를 보이고 있다. 두 성능지수 모두 같은 범위 의 값을 갖고 있으며, 거의 선형으로 일치하고 있음을 보여 RN이 신뢰할 만한 성
- 28 - 능지수임을 나타내고 있다.
Ride Number
1
0 2 3 4 5
0 1 2 3 4 5
Std.Error = 0.29 R2 = 0.85
Mean Panel Rating
Fig. 5.5 Correlation between RN and MPR
5.2.2 RN 산출 과정
Fig. 5.6는 RN계산 과정을 보이고 있다. 전반적인 흐름은 IRI 연산과 같다.
그러나, 1/4차량 필터 모델의 수치는 K1=5120 1/sec2, K2=390 1/sec2, U=0.036, C=17 1/sec 로 표준화 정의된다.
- 31 -
Table. 5.1 Classification of road roughness proposed by ISO
Road Class
Degree of Roughness S(Ω0), 10-6 [m2/cycles/m]
N1 N2
Range Geometric mean
A(Very Good) < 8 4 2.0 1.5
B(Good) 8 - 32 16 2.0 1.5
C(Average) 32 - 128 64 2.0 1.5
D(Poor) 128 - 512 256 2.0 1.5
E(Very Poor) 512 - 2048 1024 2.0 1.5
F 2048 - 8192 4096 2.0 1.5
G 8192 - 32768 16384 2.0 1.5
H > 32768 2.0 1.5
ISO 분류 기준에 따르면 노면은 PSD를 기준으로 A등급에서 H등급까지 총 8 단계로 분류하여 노면 거칠기를 표시하였다.
- 32 -
6. 국내도로평가를 위한 분류법 개발
국제 평가지수인 IRI 및 RN은 Golden Car로 불리는 표준화된 1/4 차량필터를 적용하여 도로의 거칠기 및 승차감에 영향을 주는 정도를 지수로 표현한 것이다.
IRI는 차량의 운동영역중 차체 및 현가장치의 고유진동수 영역인 1 및 10Hz 영역 을 중점적으로 고려하였으며, RN은 승차감을 나타내는 영역인 4-7 Hz 영역을 중 점적으로 필터링하여 그 신호의 RMS(Root Mean Square)값을 지수화한 것이다.
필터를 이용해 그 크기를 나타낸 IRI 및 RN지수와는 달리 ISO(International Standard Organization) 규격은 사람과 차량에의 영향을 고려하지 않는 도로노면 의 특성을 볼 수 있는 장점을 갖는 분류방법이라고 할 수 있다. 차량의 노면에 의 한 가진주파수영역이 0.5Hz ∼ 25Hz라고 가정하고 차량주행속도를 2.5m/s (9km/h)∼50m/s (180km/h)로 생각했을 때, 노면의 공간주파수를 산출하면 0.01 cycles/m∼10 cycles/m의 영역을 얻을 수 있는데 이 영역을 기준으로 도로의 경 향을 표현한 방법이 ISO 분류방법이다. 그러나 ISO 분류방법을 이용해 국내도로 를 평가했을 경우 전반적으로 ISO 분류기준으로 구분이 용이하지 않음을 발견할 수 있었다. 그림 9는 국내도로의 일반적인 특성을 보이는 도로의 예로써 ISO 분 류방법으로 평가할 경우 0.1∼1 cycles/m 영역에서는 큰 폭으로 떨어지며 1 cycles/m 이상의 영역에서는 완만해지는 도로의 특성을 충분히 고려할 수 없음 을 알 수 있다. 따라서 본 연구에서는 차량 운동에 주 가진원으로 작용하는 주파 수영역의 신호를 상세히 분류하기 위한 ISO 규격을 바탕으로 하여 새로운 분류 기준인 KRC(Korean Road Classification)을 제안하였다. 아울러서 ISO, IRI 및 RN에서 고려하지 않는 영역인 고주파수영역의 노면신호의 특성을 평가할 수 있 는 DRI (Detailde Roughness Index) 지수를 제안하였다.
- 34 -
Fig. 6.1 KRC-classification curves of road roughness
Table 6.1 Classification of road roughness proposed by KRC
H G F E D C B A
Classification
Roughness C, 10-c[m2/cycles/m]
A Average (Standard Deviation)
B Average (Standard Deviation)
Range Geometric
Mean
A(Very Good) 7.9 < 7.6
0.78075 (0.45539)
-1.75895 (0.37129)
B(Good) 7.3 - 6.7 7.0
C(Average) 6.7 - 6.1 6.4
D(Poor) 6.1 - 5.5 5.8
E(Very Poor) 5.5 - 4.9 5.2
F 4.9 - 4.3 4.6
G 4.3 - 3.7 4.0
H 3.7 > 3.4
- 35 -
Fig. 6.3은 Fig. 6.2에서 ISO 분류기준으로 나타내었던 노면에 대해서 본 연구 에서 제안한 KRC로 새롭게 분류한 결과이다. ISO 분류기준에 비해 KRC 분류기 준이 국내도로의 특성을 잘 표현하고 있음을 알 수 있다.
(a) 경부고속국도
(b) 2번국도 Fig. 6.2 Domestic road evaluation using ISO
(a) 경부고속국도
(b) 2번국도 Fig. 6.3 Domestic road evaluation using KRC
- 37 -
Fig. 6.4 DRI calculation process
- 38 -
7. 특수로 측정 및 분석
개발된 ‘Road Profiler'를 이용하여 여러 종류의 특수로 측정, 분석을 수행하였 으며 이를 바탕으로 데이터베이스를 구축하였다. Fig. 5는 측정된 특수로의 예를 보여주고 있다. 특수로 측정시에는 노면데이타의 간격을 1mm로 설정하여 매우 정밀하게 노면형상을 구현하도록 하였다. 그 결과 실제 노면형상과 유사한 데이 터를 얻을 수 있었다.
Fig. 5(a) Belgian road profile and PSD
- 39 -
Fig. 5(b) Washboard road profile and PSD
Fig. 5(c) Gravel road profile and PSD
- 40 -
8. 일반로 측정 및 데이타베이스
8.1 대상노면
국내도로의 데이터베이스 구축 및 특성분석을 위해 고속국도, 일반국도, 지방 로, 서울시내주요도로 및 비포장로를 측정하였다. Table 8.1은 과제 수행 중 측정 한 도로를 나타내고 있다. 분석을 위해 임의로 결정한 단위거리인 측정단위거리 는 고속국도는 1km, 국도와 지방로 차량정체 및 도로상황 등의 원인으로 100m를 이용하였다. 데이터 사이간격은 최대 50 cycles/m까지 분석하기 위해 10mm로 설 정하였으며 가급적 시험에 의한 오차를 줄이기 위해 주로 등속주행을 통해 시험 하였다. Fig. 8.1은 Table 8.1의 고속국도 및 일반국도 측정구간을 지도상에서 도 식적으로 나타내고 있다.
Table 8.1 List of measured roads
도 로 종 류 명 칭
고속국도
88올림픽, 경부, 경인 남해, 대전통영, 서해안, 영동, 인천공항, 중부2, 중부, 중부내륙, 중앙, 호남, 서울 외곽순환
일반국도 1번, 2번, 3번, 5번, 7번, 44번, 46번
지방로 23번, 88번, 98번, 310번, 347번, 349번, 363번, 390번
시내로 강변북로, 내부순환로, 올림픽대로
KATECH PG 단차로, 벨지안로, 자갈길로, 표준악로, 빨래판로, 보수로
- 41 -
Fig. 8.1 Measured road map
고 속 국 도 일 반 국 도 고 속 국 도 일 반 국 도
8.2 IRI/RN 을 이용한 노면 평가
주로 30km/h에서 80km/h정도의 속도로 측정하고, 노면데이타 간격은 10mm이 하로 설정하였다. 측정된 여러 종류의 도로에 대해 임의로 선택한 순차적인 구간 을 기준으로 평가한 결과를 아래 그림에 나타내었다.
Fig. 8.2 IRI/RN evaluation of roads
0 5 10 15 20 25 30 35
고속도 국도 지방도 시내도 비포장로 IRI
0 1 2 3 4 5
RN
IRI RN
- 42 -
Fig. 8.3 IRI evaluation of highway roads
0 5 10 15 20 25
1 6 11 16 21 26 31 36 41 46 51 56
구간
IRI
경부 중부 호남 남해 서해안
Fig. 8.4 IRI evaluation of national roads 0
5 10 15 20 25
1 6 11 16 21 26 31 36 41 46 51 56
구간
IRI
1번 2번 3번 4번
- 43 -
Fig. 8.5 IRI evaluation of local roads 0
5 10 15 20 25
1 2 3 4 5 6 7 8 9 10 11 12 13
구간
IRI
23번 98번 310번 349번 347번 390번 363번 88번
Fig. 8.6 IRI evaluation of seoul roads 0
5 10 15 20 25
1 2 3 4 5 6 7 8 9 10 11
구간
IRI
내부순환로 강변북로 올림픽도로
- 44 -
Fig. 8.7 RN evaluation of local roads 0
1 2 3 4 5
1 6 11 16 21 26 31 36 41 46 51 56 구간
RN
경부 중부 호남 남해 서해안
Fig. 8.8 RN evaluation of national roads 0
1 2 3 4 5
1 6 11 16 21 26 31 36 41 46 51 56
구간
RN
1번 2번 3번 4번
- 45 -
Fig. 8.9 RN evaluation of local roads 0
1 2 3 4 5
1 2 3 4 5 6 7 8 9 10 11 12 13
구간
RN
23번 98번 310번 349번 347번 390번 363번 88번
Fig. 8.10 RN evaluation of seoul roads 0
1 2 3 4 5
1 2 3 4 5 6 7 8 9 1 0 1 1
구간
RN
내부순환로 강변북로 올림픽대로
- 46 -
8.3 DRI을 이용한 노면 평가
표면 거칠기를 나타내는 DRI로 평가 할때 국도가 가장 좋게 나오고 비포장로 가 가장 나쁘게 나왔다. 이것은 기존의 지수로 평가한 결과와는 차이가 있다. 결 과적으로 국도가 고속도로보다 표면의 세부 거칠기가 더 좋다고 볼 수 있다.
Fig. 8.12 DRI evaluation of highway roads
0 1 2 3 4 5
1 6 1 1 1 6 2 1 2 6 3 1 3 6 4 1 4 6 5 1 5 6
구 간
DRI
경 부 중 부 호 남 남 해 서 해 안
Fig. 8.11 DRI evaluation of roads
0 1 2 3 4 5
고 속 도 국 도 지 방 도 시 내 도 비 포 장 로
7
- 47 -
Fig. 8.13 DRI evaluation of national roads
0 1 2 3 4 5
1 6 11 16 21 26 31 36 41 46 51 56 61 66
구간
DRI
1국도 2국도 3국도 4국도
Fig. 8.14 DRI evaluation of local roads
0 1 2 3 4 5
1 2 3 4 5 6 7 8 9 10 11 12 13
구간
DRI
23번 98번 310번 349번 347번 390번 363번 88번
- 48 -
Fig. 8.15 DRI evaluation of seoul roads
0 1 2 3 4 5
1 2 3 4 5 6 7 8 9 10 11
구간
DRI
내부순환로 강변북로 올림픽도로
- 49 -
9. 결 언
도로면 측정 및 평가 프로그램인 ‘Road Profiler’를 통하여 측정된 국내 도로 면의 분석을 통해 얻어진 결과를 요약하면 다음과 같다.
- Road profiler S/W를 이용하여 국내 특수로 및 국내 대표적인 도로를 측정하 여 데이터베이스를 구축하고 공인된 평가모듈(IRI, RN, ISO)을 사용하여 분 석하였다.
- 국내노면성능평가를 위한 독자적인 분류체계와 평가지수로써 각각 KRC와 DRI를 제시하였다.
- 전국적인 도로노면 데이터베이스 구축를 구축하고 데이터를 활용할 수 있는 데이터베이스 프로그램을 개발하였다.
이상의 연구 결과를 바탕으로 향후 추진해야할 사항은 다음과 같다.
- 국내도로실정에 맞는 노면 생성 알고리즘 개발 - 국내도로노면을 이용한 서스펜션 설계에 응용
- KRC를 활용한 차량내구성능에 영향을 평가할 수 있는 새로운 성능지수 개 발에 관한 연구
- 지방로 및 시내도로 측정 추가에 의한 전국적인 도로노면 데이터베이스 구축
- 50 - 참고 문헌
[1] ISO 8608 Mechanical vibration - Road surface profiles - Reporting of measured data
[2] 민병훈, 정원욱, “차량의 가속내구시험을 위한 TEST ROAD PROFILE 설계 방법”, 한국자동차 공학회 논문집, pp.128-141, 1994.
[3] 김광석, 유완석, “전력밀도함수를 이용한 노면형상 생성에 관한 연구”, 한 국자동차 공학회 논문집, pp.136-145, 1997.
[4] M. W. Sayers and S. M. Karamihas, "The Little Book of Profiling", pp.1-61, 1997.
[5] 김진용, 허승진, 노기한, 최규재, 임종순 “도로면 측정 분석용 프로그램 개 발 및 응용”, 한국자동차 공학회 논문집, pp 842-847, 2001
- 51 -
Development of the Classification method and Performance Index for Roughness Characteristics Evaluation of
Domestic Roads
by Choi, Jang-han
The Professional Graduate School of automotive Engineering Kookmin University
Seoul, Korea
ABSTRACT
As a dynamic road profiling device, Accelerometer Established Inertial Profiling Reference (AEIPR) method has cost effectiveness and high reliability for road profiling. Road profiling tests using AEIPR method are performed on the special test tracks in KATECH and all kinds of domestic roads. The test results are shown and evaluated by International road evaluation Indexes and classification.
- 52 -
감사의 글
전공을 바꾸어서 처음 학교에 왔을 때 잘할 수 있을까 하는 의구심이 앞섰던 것이 사실입니다. 하지만 이제 결실을 맞는 시점에서 생각하니 옳은 선택이 이 었다는 것을 다시 한번 느낍니다.
먼저 여기까지 인도해 주시고 도와주신 하나님께 깊은 감사를 드립니다. 물질적 으로 정신적으로 도움을 주신 부모님께 감사를 전합니다. 옆에서 인정해주고 함께 걱정해 주었던 매형과 누나에게도 감사를 드립니다.
여러 가지로 미흡한 저를 학문적이나 인간적으로 성숙할 수 있게 해주시고 논문 을 마치는 과정에서 관심과 사랑으로 지도해 주신 허승진 교수님께 깊은 감사를 드립니다. 또한 저의 논문을 살펴보아 주신 김찬묵 교수님과 임홍재 교수님께 큰 감사를 드립니다. 과제를 도우면서 배움의 기회를 가질 수 있도록 해주신 이재형 교수님과 어려움에 있을 때 조언을 아끼지 않으신 고강호 교수님에게도 감사를 드 립니다. 올해 내내 걸쳐 도로면 측정시험을 지도해주신 자동차부품연구원의 노기 한 연구원님께도 감사를 드립니다.
실험실을 이끄는 성효씨와 듬직한 범진씨, 과제를 물려주고 계속되는 연락으 로 고생했던 진용씨, 학기 내내 저의 부족함을 아낌없이 메워주었던 동기 재윤 이, 부지런한 준수, 모든 일을 함께하고 너무나 힘들었던 도로시험에 파트너 준 식이, 직장에서 과감히 학업을 선택한 병호씨, 여자한테 인기 좋은 병길이, 축 구선수 최용수 닮은 정호, 유학생활 중에도 착실한 영일이, 자동차를 진심으로 좋아하는 형수, 너무 착한 영하, 혼자 들어와서 외로운 향준이, 졸지에 실험실 을 같이 쓰게 된 재미있는 명식이 모두 모두에게 감사의 마음을 전하고 싶습니 다.
마지막으로 앞으로의 나의 삶 속에서도 항상 함께 하시고 인도하실 하나님께 영광을 돌리며 감사의 글을 마칩니다.
2002년 12월