Copyright
Ⓒ2011 KSAE 1225-6382/2011/114-14 Transactions of KSAE, Vol. 19, No. 6, pp.97-106 (2011)
프리우스 III의 차량 출력 분석에 기초한 연비 예측 방안에 관한 연구
정 재 우*․서 영 호․최 용 준․최 성 은․김 형 구․정 기 윤
자동차부품연구원 그린카 파워트레인 연구본부
A Study on the Fuel Economy Prediction Method Based on Vehicle Power Analysis of PRIUS III
Jaewoo Chung*․Youngho Seo․Yongjun Choi․Sungeun Choi․Hyounggu Kim․Kiyun Jung
Green Car Powertrain R&D Division, KATECH, 74 Yongjeong-ri, Pungse-myeon, Dongnam-gu, Cheonan-si, Chungnam 330-912, Korea
(Received 15 March 2011 / Accepted 28 June 2011)
Abstract : Both an optimal design of the engine operating strategy and fuel economy prediction technique for a HEV under the vehicle driving condition are very crucial for the development of vehicle fuel economy performance. Thus, in this study, engine operating characteristics of PRIUS III were analyzed with vehicle running conditions and the correlations between vehicle tractive power and fuel consumption were introduced. As a result, fuel economy performance of PRIUS III with various test modes were predicted and verified. Errors of predicted fuel economy were between -5% and -1%.
Key words : HEV(하이브리드자동차), Fuel economy(연비), Vehicle power(차량출력), Engine(엔진)
1. 서 론
1)
최근의 배기규제와 CO2 규제등으로 인하여, 연료 소모효율이 높은 친환경자동차에 대한 관심과 개발 필요성이 그 어느 때보다도 높아져가고 있는 상황 이다.
이러한 기술적 개발 필요성에 따라 일본을 위시 한 자동차 기술 선진국에서는 HEV 및 PHEV 등의 대체 동력 차량에 대한 연구개발 및 상용화가 추진 되고 있으며, 우리나라 또한 이들에 대한 연구개발 과 상용화의 요구가 증가되고 있다.
한편으로 연료 경제성을 중시하는 HEV와 같은 차 량의 경우, 연비성능의 극대화를 위하여서는 연료의 주 소비 동력발생원인 내연기관의 작동 상태 최적 설 계 및 차량 상태에서의 소모연료량의 예측 기술의 개
*
Corresponding author, E-mail: [email protected]
발이 중요한 위치를 차지하고 있으며, 이에 대한 다 양하며 심도 있는 연구들이 진행되고 있다.1)
이러한 차량 내 연료소모 특성을 예측하기 위한 방안으로서 각 부품들을 세부적으로 모델링하고 이 로부터 연료소모를 예측하는 것이 일반적이며,2) 한 편으로 이의 방법이 근원적 기술개발이라는 측면이 존재하나, 기타의 차량에 대한 벤치마킹을 통한 작 동 개요의 이해 등은 관련기술의 효율적 개발과 개 선에 있어서 필요한 일이라 사료된다.
국외적으로 ANL(Argonna National Labratory)에 서는 시판중인 HEV에 대한 시험 분석을 통하여 HEV와 적용엔진의 작동 특성을 이해하고 성능 개 선 추진 시에 필요한 각종의 개념과 데이타를 제공 하고 있다.3-5) 이러한 HEV 차량에 대한 분석 결과는 국내에서도 제공되고 있으며,6,7) 이의 결과는 국내 연구개발의 초석에 많은 기여를 하였다고 사료된다.
정재우․서영호․최용준․최성은․김형구․정기윤
본 연구에서는 최근의 HEV인 프리우스 3세대 차 량8)의 차대동력계상 주행 시 연료소모와 요구 동력 등을 분석하여, 차대 동력계 상태에서의 HEV의 엔 진 작동 전략을 확인하였으며, 이의 원리적인 출력 분배 특성을 이용하여 일차적으로 차대 동력계 상 태에서의 차량 연비를 예측할 수 있는 방안을 제공 하였다.
이러한 연구 결과가 HEV용 내연기관의 최적화 설계 및 제어에 대한 기초 자료로 활용되기를 기대 한다.
2. 실험장치 및 실험 방법
본 연구에서는 연비의 측정이 용이한 차량동력계 상에서 주행 실험을 수행하였으며, 이때의 엔진 및 기타 시스템 관련 정보를 수집하여 연비성능과 주 요 부품의 작동 상태 데이터를 취득하였다.
이를 위하여 시험용 차량, 차량동력계시스템 및 데이터 취득 시스템 등의 실험장치의 구성이 수행 되었다.
실험 차량은 가장 최근의 HEV인 도요타 프리우 스 III를 선정하였으며, 이의 차량 상태 및 엔진 상태 관련 정보는 도요타사의 데이터 스케너인 Tech- stream을 사용하였다.
차대동력계는 AVL 사의 4 Wheel drive 형식이며, 배기분석시스템과 동시에 적용됨으로서 특정 주행 모드에서의 배기분석과 카본 발런스법을 이용한 연 비 계산을 수행하였다.
Fig. 1은 차대동력계 실험장치 구성의 개략을 나 타내었으며, Table 1과 2에는 차량제원 및 차량 전용 데이터 취득 장치를 이용하여 취득한 주요한 엔진
Fig. 1 Schematic of vehicle dynamometer system
Photo. 1 Photographs of vehicle test and data aquisition system
Table 1 Specifications of test vehicle (Toyota PRIUSIII)
Engine
Displacement (cc) 1,797 Cylinder In-line, 4-cylinder Maximum power 73kW/5200rpm Maximum torque 142Nm/4000rpm
Electric motor
Motor type Permanent magnet AC synchronous motor
Torque 207Nm
Power output 60kW (80 hp)
Voltage 650 V max.
Traction battery
Type Sealed Nickel-Metal Hybrid (Ni-MH)
Voltage 201.6V
Power output 27 kW (26hp) Hybrid system net power 100 kW (134 hp)
관련 데이터 항목을 제시하였다. 데이터 취득 장치 의 샘플주기는 약 0.12초 였다.
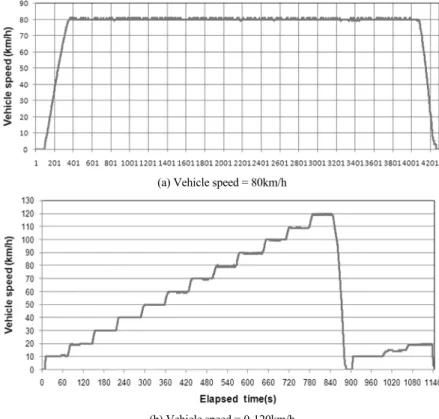
상기 실험장치 구성 후 실험시의 차대동력계 상 주행 모드는 CVS 75모드, NEDC 모드, 80km정속주 행, 그리고 단계 가속 주행의 4가지였으며, 그 각각 을 Fig. 2~4에 나타내었다.
CVS 75와 NEDC 모드는 최종적으로 연비예측결 과의 결과검증에 활용되었으며, 이미 잘 알려진 바 와 같이 각각 가솔린 차량 및 디젤 차량의 인증 시험 모드이다. CVS 75 모드는 가감속이 상대적으로 빈 번하며, 최고 속도가 약 90km/h인 반면, NEDC 모드 의 경우, 최고 속도는 120km/h로서 CVS 75 모드에 비하여 높은 차속과 등속주행 조건이 상대적으로 많은 특성을 가진다. 그러나 이러한 주행모드들은
프리우스 III의 차량 출력 분석에 기초한 연비 예측 방안에 관한 연구
Fig. 2 CVS 75 test mode
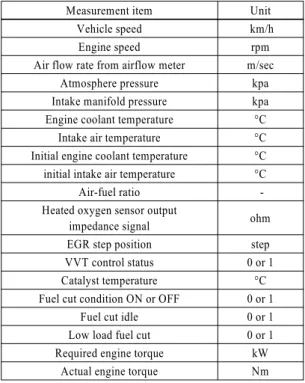
Table 2 Acquired engine data from techstream (data scanner)
Measurement item Unit
Vehicle speed km/h
Engine speed rpm
Air flow rate from airflow meter m/sec
Atmosphere pressure kpa
Intake manifold pressure kpa Engine coolant temperature °C
Intake air temperature °C
Initial engine coolant temperature °C initial intake air temperature °C
Air-fuel ratio -
Heated oxygen sensor output
impedance signal ohm
EGR step position step
VVT control status 0 or 1
Catalyst temperature °C
Fuel cut condition ON or OFF 0 or 1
Fuel cut idle 0 or 1
Low load fuel cut 0 or 1
Required engine torque kW
Actual engine torque Nm
전반적으로 과도운전이 상대적으로 많이 존재함으 로서, 차속에 따른 엔진의 작동 특성을 정확히 분석 하기 어려운 점이 존재하였다. 이에 따라 일정한 차 속에서의 엔진작동관련 데이터 취득이 필요하였으 며, 80km/h 정속 주행 및 0-120km/h 까지의 계단식 차속 증가 형태의 주행 실험을 수행하였다.
특히, 80km/h의 주행은 가속 및 감속시의 엔진 거동 을 중점적으로 확인하기 위하여 수행되었으며, 120km/h
Fig. 3 NEDC mode
까지의 차속변화실험은 각 정속 상태에서의 엔진 거동을 중점적으로 분석하기 위하여 수행되었다.
실험시의 배터리 SOC(State Of Charge) 상태에 따 라 차량의 연비는 영향을 받을 수 있으나, 엔진관련 데이터의 수집 동안 데이터 스케너 특성(스케너의 각 데이터군에 대한 선택적 데이터 취득 특성)으로 인하여 배터리 SOC는 엔진 관련 데이터와 동시에 모니터링이 불가능 하였다.
따라서 SOC의 상태가 연비에 미치는 범위를 검 토하기 위하여 엔진 데이터의 취득은 포기하는 대 신 배터리 관련 데이터군의 취득만을 수행하여 연 비에 미치는 SOC의 영향정도를 검토하였다.
SOC 관련 차량 실험은 초기 SOC가 비교적 안정 적인 경우에 대하여 높은 SOC 상태 그리고 낮은 SOC 상태에서의 연비 변화 폭을 간접적으로 제시 함으로서 그 정확성에 대한 간접적 제한 범위를 제 공하고자 하였다.
Jaewoo Chung․Youngho Seo․Yongjun Choi․Sungeun Choi․Hyounggu Kim․Kiyun Jung
(a) Vehicle speed = 80km/h
(b) Vehicle speed = 0-120km/h
Fig. 4 Steady-state vehicle speed testFig. 5는 기준조건에 비하여 SOC가 높은 조건 그 리고 낮은 조건에서의 차속과 SOC 상태 변화를 데 이터 스케너를 이용하여 측정한 결과이다.
결과그림에서 보이듯이 SOC 상태는 CVS 75 모 드의 경우 Phase 2또는 3이 종료되면서 거의 동일한 수준에 도달하는 것을 확인할 수 있으며, 최대 67.4%의 SOC 상태와 최소 51.7%의 SOC 상태에 있 어서의 연비는 기준 상태인 SOC 58.8%인 조건에 대 하여 각각 -2% 그리고 14% 정도의 오차 범위를 가 지는 것을 확인할 수 있다. (Table 3 참조)
Table 3 Fuel economy test results according to start SOC conditions
Start conditions
Fuel economy
(km/l)
SOC (%)
Initial SOC state Start End
Cold
32.870 58.8 65.4 Standard for comparisons 33.610 67.4 64.3 Higher SOC start 28.942 51.7 65.4 Lower SOC start
본 실험의 경우, 비교적 엔진의 SOC는 안정적인 상태에서 실험이 시작되었으며, 이에 따라 SOC 변 화에 대한 최대 오차범위는 약 14%이내인 것으로 판단된다.
3. 분석 결과
3.1 차량의 요구 출력 및 차량효율의 정의 차량의 연비를 모델링하기 위한 일반적인 과정에 서는 엔진에 요구되는 요구 출력의 산정이 필수적 이다. 따라서 차량의 주행에 필요한 요구출력(trac- tive power)으로부터 엔진에 요구되는 출력을 산정 하는 것이 실제적으로 연비를 예측하기 위한 기본 전개과정이라고 할 수 있다.
이에 차량의 구동과 엔진 구동과의 관계를 확인 하기 위한 첫 번째 단계로서 차량의 요구 출력의 계 산과정 수립 및 차량 요구 출력과 엔진출력과의 관 계를 검토할 필요가 있다.
이러한 차량 출력으로부터 연료 소모 특성을 파
A Study on the Fuel Economy Prediction Method Based on Vehicle Power Analysis of PRIUS III
(a) Standard vs. high SOC
(b) Standard vs. low SOC
Fig. 5 SOC profile during CVS 75 mode test악하는 개념은 연비 우선의 HEV등과 같은 차량에 있어 철저히 차량 연비 위주의 운전 설계가 필요하 므로, 차량 주행 상태에 따른 엔진작동 및 연료소모 특성의 규정은 매우 효율적인 연비 성능 설계를 가 능하게 할 것으로 사료된다.
차량 주행 시의 차량 주행 동력 즉, tractive power9) 는 road load 또는 주행 저항으로 계산될 수 있으며, 토크 단위의 주행저항과 단위시간동안의 차량이동 거리의 곱으로 표현될 수 있다.
차량의 주행 저항과 tractive power는 각각 식 (1) 과 (2)에 나타내었다.
sin
(1)
×
(2)where,
: Road load coefficient (N)
: Road load coefficient (N/(km/h))
: Road load coefficient (N/(km/h)2)
: Vehicle weight ( kgm)
: Resistance force (N)
: Vehicle speed (km/h)
: Distance (m)
: Vehicle (tractive) power (W)
따라서 차량 주행 시 요구되는 출력은 속도와 도 로구배만의 함수로 될 수 있으며, 도로구배를 고려 하지 않는 경우, 오로지 차속만의 함수로 나타낼 수 있다.
정재우․서영호․최용준․최성은․김형구․정기윤
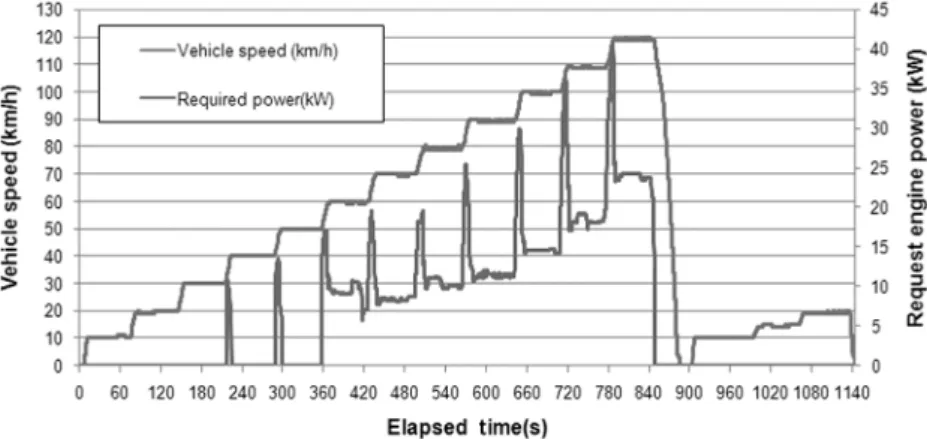
Fig. 6 Example of request engine power according to vehicle speed 한편 tractive power와 연료가 가지는 출력(에너
지)의 비를 차량효율(vehicle efficiency)2)로 정의한 다. 이는 전술하였듯이 차량의 경우, 어떠한 주행상 태라 하더라도, 연비에 대한 최적화가 필요하며, 차 량의 주행 시 엔진제어전략은 바로 연비를 기준으 로 설정될 가능성이 매우 높기 때문이다.
×
(3)
×
(4)where,
: Fuel power (W)
: Vehicle efficiency (%)
: Fuel mass flow rate (kg/s) : Lower heating value of fuel (J/kg) - 43,000kJ/kg
3.2 차량 운전조건에 따른 엔진 작동 특성 운전조건에 따른 분석은 실험이 수행된 다양한 운전모드를 전반적으로 검토하였으며, 아래의 Fig. 6 에는 일예로서 단계별 차속증가시의 차속에 따른 엔진의 작동 특성을 보여주고 있다.
전반적으로는 아래의 실험 결과에서 보이듯이 차 속이 30km/h 이하의 가속 구간에서는 엔진은 구동 되지 않는 특성을 보이고 있으며, 정상상태의 경우, 60km/h 미만의 경우에도 엔진은 작동되지 않는 특 성을 나타내고 있다. 한편 감속 시에는 엔진은 작동
되지 않는 특성을 제시하고 있다. 따라서 아래의 절 에서는 가속 조건 및 등속 조건을 기준으로 좀 더 자 세히 구분하여 결과를 제시하였다.
3.2.1 가속시의 차량요구 출력 및 연료 출력의 관계
Fig. 7은 80km/h까지의 가속시에 계산된 차량요 구 출력()에 대한 차량효율(
)과의 관계 를 나타낸 것이다. 그림에서 보이듯이 이 두 인자 간 에는 매우 밀접한 관계가 있음을 알 수 있으며, 이 관계의 모델화 및 적용기준의 도출은 차속에 대한 차량연비의 계산이 가능함을 의미한다. 한편 80km/h 까지의 차속 증가시의 차량효율(
)은1.6%미만 에 존재하고 있으며, 차량요구출력()의 증가 에 대하여 차량효율(
)은 선형적으로 증가되고 있음을 보여 준다.Fig. 7 Tractive power and fuel power analysis (acceleration duration)
프리우스 III의 차량 출력 분석에 기초한 연비 예측 방안에 관한 연구
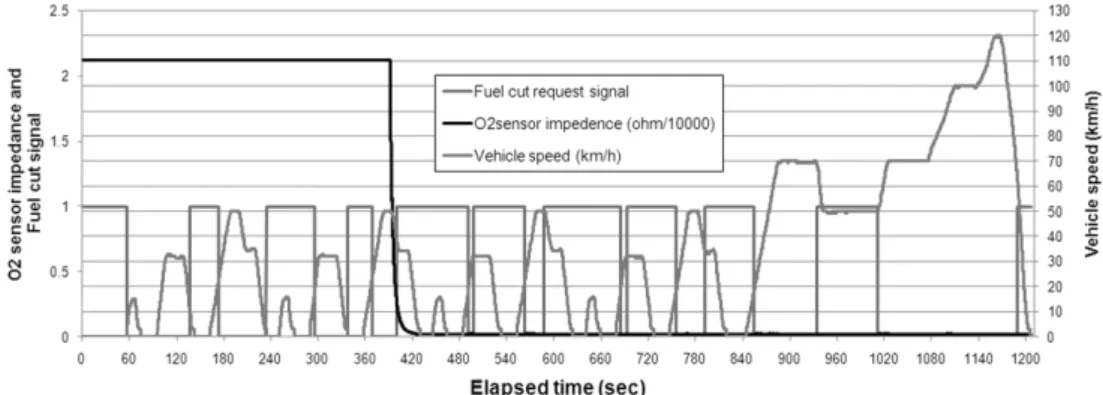
Fig. 9 O2 sensor impedance signal, fuel cut signal and vehicle speed profile during NEDC mode test 3.2.2 등속 상태의 요구 엔진 출력
한편 상기의 단계적인 차속 증가시의 등속상태 데이터를 이용하여 차량요구 출력에 대한 엔진요구 출력과의 관계를 검토하였으며, 그 결과를 아래의 Fig. 8에 제시하였다. 참고문헌3)에서는 프리우스 II 및 기타 차량의 엔진출력을 차량출력과 비교하여 제시한 바 있다. 이때 엔진출력과 차량 출력은 비교 적 선형관계를 이루고 있으며, 특히 엔진의 chatte- ring을 방지하기 위하여 최소 엔진 출력이 존재함을 제시한바 있다. 본 연구에 사용된 프리우스 III의 경 우 또한 등속상태에서는 차량의 요구 출력에 대하 여 엔진 출력은 비교적 비례관계를 가지고 있음을 제시하고 있으며, 엔진의 최소 요구 출력은 약 7kw 에서 8kw 정도에 존재하는 경향을 제시하였다.
Fig. 8에 제시된 등속 운전시의 차량요구출력에 대한 엔진요구출력과의 상관식을 이용하여 등속조 건에서의 엔진 출력이 선정될 수 있다.
Fig. 8 Relationship between tractive power and required engine power during constant vehicle speed conditions (max. speed 120km/h)
3.2.3 Feed-back 제어에 의한 Fuel-cut 특성 엔진의 작동은 엔진의 속도와 밀접한 관계가 있 으나, 한편으로 엔진의 제어 특성과도 밀접한 관계 가 있다. 즉, 엔진의 연료효율을 높이기 위하여 차량 의 특정 운전 조건에서 엔진의 fuel-cut을 적용하고 있으나, fuel-cut을 수행하기 위하여서는 시동 후 정 확한 엔진의 연료 분사제어가 가능한 시점까지는 fuel-cut은 수행되지 못한다.
따라서 연료분사의 feed-back 제어를 위한 준비기 간 동안은 차량의 속도와는 별계의 예외적인 지속 적인 연료 분사가 진행되어지는 특성을 나타낸다.
일예로 NEDC 모드의 경우, 초기에는 연료 분사 가 지속되고 있으나, 일정기간이 진행된 이후 특정 차속에서는 연료분사가 이루어지고 있지 않음을 확 인할 수 있다.
이러한 연료분사의 제어는 feed-back 수행을 위한 Heated O2 센서의 상태와 밀접한 관계를 가지며, Heated O2 센서의 경우, 센서가 가열되어야만 정상 적인 작동이 가능10)하기 때문에 이 기간 동안은 fuel-cut은 수행되지 못하는 특성을 가진다.
4. 프리우스 III의 동력계상 연비 예측 과정의 수립
4.1 프리우스 III 용 엔진의 요구 출력과 연료소모량과의 관계
본 연구에서 등속상태 시 차량의 요구 출력과 엔 진의 요구출력과의 관계를 제시하였다. 한편 일반 적인 내연기관과는 달리 HEV 차량에서는 엔진의 효율이 높은 영역에서만 작동되기 때문에 비교적
Jaewoo Chung․Youngho Seo․Yongjun Choi․Sungeun Choi․Hyounggu Kim․Kiyun Jung
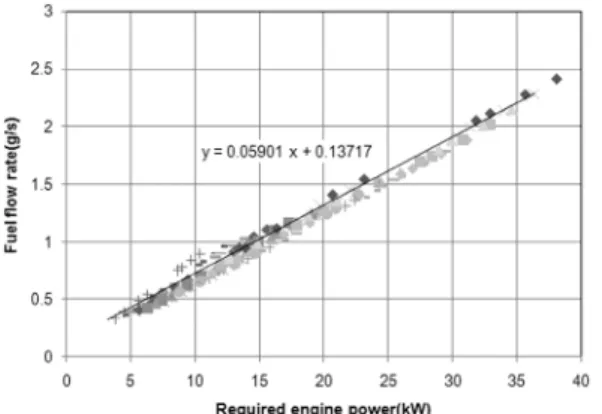
Fig. 11 Fuel consumption prediction process of PRIUS III during dynamometer tests Fig. 10 Required engine power vs. fuel flow rate
열효율은 유사한 범위 내에서 존재하며, 따라서 엔 진의 요구출력과 소모연료량은 1차원적인 비례관 계가 더욱 뚜렷이 나타난다.
이의 결과를 Fig. 10에 제시하였으며, 이로부터 요구 엔진출력에 대한 연료소모량을 직접적으로 계 산할 수 있는 식을 제시하였다.
4.2 프리우스 III 차량의 연비 예측 계산과정 수립과 검증
상기의 검토내용을 토대로 하여 다음과 같은 연 비 예측 계산과정을 수립할 수 있다.
동력계 상에서의 연비 예측 계산과정을 간단히 설명하면 다음과 같다.
동력계의 경우, 도로 구배는 존재하지 않으므로, 차량의 구동 출력(tractive power)은 차속의 함수이 며, 순간적인 차속으로부터 순간의 차량 구동 출력 을 계산할 수 있다.
한편 차속의 가속, 정속, 감속에 따라 연료공급형 태가 달라지므로, 이의 구분을 위하여, 약 1초 전의 차 속과 현재의 차속을 비교하여 가속, 정속, 감속 상태를 판단하였으며, 각 경우의 연료 공급량을 계산한다.
단, 예외적인 경우로서, O2 센서가 가열되기 전에 는 연료는 차속과 관계없이 공급되며, O2 센서의 가 열 또는 feed-back 제어의 준비 여부는 O2 센서의 임 피던스를 확인하여 결정한다. O2센서가 충분히 가 열되는 경우 O2 센서의 임피던스는 일정 수준이하 로 제시된다.10)
O2 센서의 가열을 통하여 feed-back 제어가 수행 되는 경우, 가속 및 정속 주행시는 차속에 따라 fuel- cut 조건이 형성되며, 가속은 20~30km/h 이상의 조 건에서 그리고 정속의 경우는 60km/h 이상의 조건 에서부터 연료가 공급되는 특성을 가진다.
단, 가속 시 연료공급 개시 조건이 차속은 20km/h
A Study on the Fuel Economy Prediction Method Based on Vehicle Power Analysis of PRIUS III
Table 4 Verification of fuel economy calculation (NEDC mode)
Conditions Inputs Test distance
(km)
Fuel economy (km/l) Err Test Calculation (%)
Using data scanner Fuel cut signal, A/F signal, MAF signal, Requested RPM
10.2 19.7
18.2 6
Using tractive power Vehicle speed,
O2 sensor impedance 20.39 -3
Table 5 Verification of fuel economy calculation (CVS 75, Phase 3, Hot start)
Conditions Inputs Test distance
(km)
Fuel economy (km/l) Err Test Calculation (%)
Using data scanner Fuel cut signal, A/F signal, MAF signal,
Requestes RPM 5.77 21.89 21.77 1
Using tractive power Vehicle speed, O2 sensor impedance 22.94 -5
Table 6 Verification of fuel economy calculation (CVS 75, Phase 1 & 2, Cold start)
Conditions Inputs Test distance
(km)
Fuel economy (km/l) Err Test Calculation (%)
Using data scanner Fuel cut signal, A/F signal, MAF signal,
Requestes RPM 11.95 32.2 33.49 -4
Using tractive power Vehicle speed, O2 sensor impedance 32.64 -1
와 30km/h 사이에 존재하며, 아직 그 규칙성은 정확 히 판단되지 못한 상황이다. 그러나, 차대 동력계상 의 연비 예측결과는 가속시의 연료공급개시 차속을 30km 이상의 조건으로 설정하는 경우, 비교적 좋은 예측결과를 제시하였다.
상기의 계산식을 이용하여 다양한 차량 주행모드 에서의 연비계산 결과를 검증하였으며, 그 결과를 Table 4, 5, 6에 운전모드별로 제시하였다. 우선적으 로 데이터 스케너인 Techstream에서 제공하는 데이 터의 정확성을 검증하기 위하여, 데이터 스케너의 데이터를 이용하여 계산한 순간 연료 분사량의 합 산으로부터 계산된 연비와 동력계상 배기가스 분석 을 통해 구한 연비와의 오차는 -4%에서 6% 정도의 범위를 제시하였다.
한편으로 본 연구에서 제시한 방법으로 연비를 계산하는 경우는 -5%에서 -1%까지의 오차 범위 내 에서 비교적 정확한 결과를 나타냄을 알 수 있다.
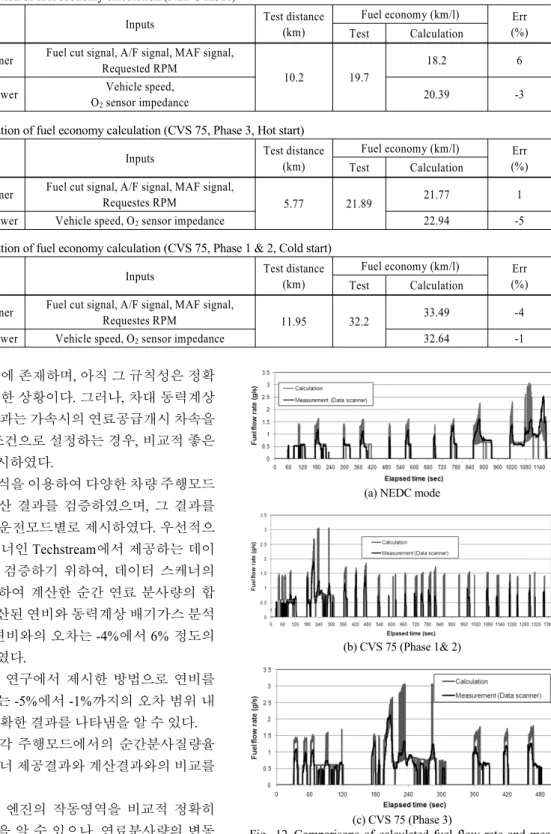
Fig. 12에는 각 주행모드에서의 순간분사질량율 의 데이터 스케너 제공결과와 계산결과와의 비교를 나타내었다.
계산 결과는 엔진의 작동영역을 비교적 정확히 예측하고 있음을 알 수 있으나, 연료분사량의 변동 이 상대적으로 많이 나타나고 있음을 알 수 있다. 이
(a) NEDC mode
(b) CVS 75 (Phase 1& 2)
(c) CVS 75 (Phase 3)
Fig. 12 Comparisons of calculated fuel flow rate and mea- sured fuel flow rate during chassis dynamometer tests
정재우․서영호․최용준․최성은․김형구․정기윤
는 가속/정속/감속의 판단 시 1초 전의 속도와의 비 교라는 단순한 방법을 사용함으로서 생기는 현상으 로서, 좀 더 체계적인 운전조건의 판단 방안의 제공 은 실제 엔진의 작동상태를 구체적으로 예측하는 데 도움이 될 것으로 예상된다.
5. 결 론
본 연구를 통하여 얻을 수 있었던 연구결과를 아 래에 간단히 제시하였다.
1) 프리우스 3세대 차량용 엔진의 경우, 가속시 차량 요구 출력은 차량효율(차량요구출력/연료출력) 과는 밀접한 관계가 있음을 확인하였으며, 이로 부터 가속시의 연료소모량을 예측할 수 있었다.
2) 등속상태의 경우, 차량의 요구 출력과 엔진요구 출력과의 관계는 선형적인관계가 있음을 확인 하였으며, 엔진의 최소 요구 출력은 약 7~8kW 정 도임을 확인할 수 있었다.
3) 엔진의 fuel-cut 조건은 연료분사의 feed-back 제 어를 위한 O2 센서의 활성 및 차속에 밀접한 관계 가 있음을 확인하였으며, O2 센서의 가열이 이루 어지지 않은 경우, 차속이 20km/h 이하의 조건과 감속시에서만 fuel-cut 이 발생되었다.
4) 그러나 O2 센서의 활성과 함께 연료분사의 feed- back 제어가 이루어지는 경우, 가속시는 30km/h 이상 그리고 정상상태에서는 60km/h 이상의 조 건에서 만 연료가 분사되는 특성을 제시하였다.
5) 상기의 차량 구동시의 엔진 작동 특성을 이용하 여 간단한 연료소모량 예측 계산을 수행하였으 며, 이의 경우, 10%이내의 오차에서 연비가 예측 됨을 확인하였다.
후 기
본 논문은 지식경제부에서 지원하는 2010년도 산 업원천기반기술개발사업의 수행 연구결과이며, 이 에 관계기관에 감사를 전합니다.
References
1) S. Yang, H. Kwak, C. Myung and S. Park,
“Optimization of the Hybrid Engine System to Improve the Fuel Economy,” Fall Conference Proceedings, KSAE, pp.1413-1418, 2005.
2) E. K. Nam, “Fuel Consumption Modeling of Hybrid Vehicles in PERE,” SAE 2005-01- 0627, 2005.
3) M. Duoba, H. L.-Busch, R. Carlson, T. Bohn and S. Gurski, “Analysis of Power-split HEV Control Strategies Using Data from Several Vehicles,” SAE 2007-01-0291
4) R. W. Carson, M. J. Duoba, T. P. Bohn and A.
D. Vyas, “Testing and Analysis of Three Plug- in Hybrid Electric Vehicles,” SAE 2007-01- 0283, 2007.
5) M. Duoba, H. Ng and R. Larsen, “In-suit Mapping and Analysis of the Toyota Pruis HEV Engine,” SAE 2000-01-3096, 2000.
6) U. Yeo, J. Ryu, G. Kim and Y. Lee, “A Study on the HEV Control Characterisitcs under Various Driving Conditions,” Spring Conference Proceedings, KSAE, pp.33-38, 2003.
7) Green Network, http://greenet.katech.re.kr/, Katech.
8) N. Kawamoto, K. Naiki, T. Kawai, T. Shikida and M. Tomatsuri, “Development of New 1.8-liter Engine for Hybrid Vehicles,” SAE 2009-01-1061, 2009.
9) G. Sovran and M. S. Bohn, “Formula for the Tractive-energy Requirements of Vehicles Driv- ing the EPA Schedules,” SAE 810184, 1981.
10) PRIUS REPAIR MANUAL (I-1), 2009.