서론 I.
.
. ,
.
.
.
, , ,
. ,
. ,
.
.
.
[1]
[2-4] .
.
* (Corresponding Author)
: 2010. 11. 30., : 2010. 12. 10., : 2010. 12. 23.
, , :
([email protected]/[email protected]/[email protected]) 2010
AIM .
2010 .
. 4
. , .
[5-7].
, .
.
, .
. ․
․ .
.
Design and Control of a Wheel-Chair Robot for Handicapped or Elderly Persons
, , *
(Hu Seop Kim1, He Su Song1, and Seul Jung1)
1
Chungnam National University
Abstract: This paper presents design and control of a wheelchair robot for handicapped or elderly persons. Novel multi-functional design concepts are introduced. The first function is to balance the chair always parallel to the flat ground so that the driver feels comfortable when he/she drives on the slope. The second function is to help the driver to stand up by pushing the chair so that the driver can get out from the chair with ease. The third design is to make it foldable for easy carrying for automobiles. The last function is an immediate stop and start protection. Experimental studies are conducted to demonstrate the feasibility and functionality of each mechanical design.
Keywords: wheelchair, handicapped or elderly person, adjustable chair mechanism
Copyright© ICROS 2011
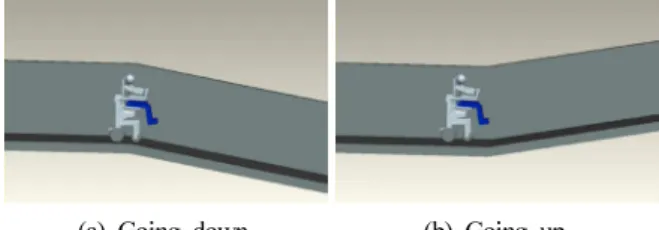
(a) Going down. (b) Going up.
1. .
Fig. 1. Concept of up and down control design.
.
1 (a)
(b) .
.
.
.
시스템 개요 II.
전체 시스템 설계 1.
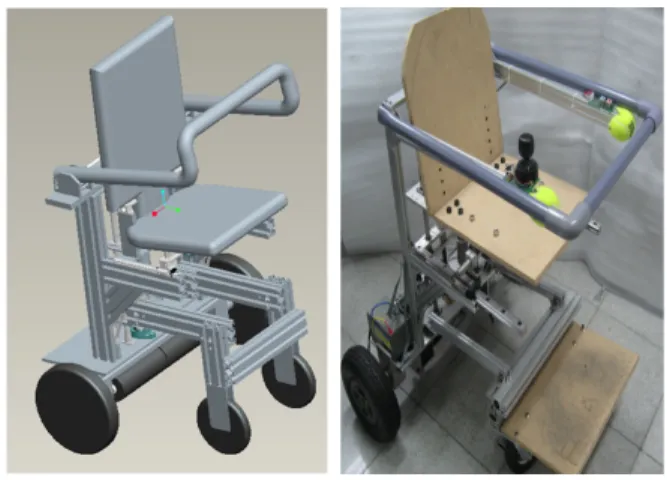
2 .
. .
. 3
․ .
.
카트로 변환 설계 1.1
3 .
. 지면의 높낮이에 따른 수평 조절 설계 1.2
4(a) .
. 4(b)
.
. 몸을 일으켜 세우는 기구 설계 1.3
․ 5
. 5
, ․
. ․
. ,
5(b) LM
. LM
360 . 휴대용으로 접히는 구조 설계
1.4
2. .
Fig. 2. Overall system.
3. .
Fig. 3. Transform into a pushing cart.
(a) Down direction. (b) Up direction.
4. .
Fig. 4. Up and down control concept.
(a) Sitdown. (b) Standup.
5. .
Fig. 5. Lifting up concept.
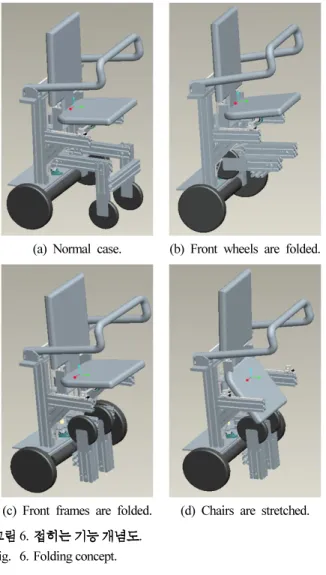
. 6
. .
전체 시스템 구성 2.
7
2 DC ,
1 DC , ․
1 DC
4 DC .
1 Tilt
Sensor(SA1) , ,
AM-3Axis 3 .
DSP2812 , 2 DC
(RS232), 2 DC .
2 DC Driver (NT-DMDSC-50A)
2 DC Driver
(LMD18200) .
. 하드웨어 구성 3.
8 .
.
, , , 4 AD
DSP2812 . 4
2 PWM(pulse
width modulation) DC
.
9 .
.
,
. 4
. (a) Normal case. (b) Front wheels are folded.
(c) Front frames are folded. (d) Chairs are stretched.
6. .
Fig. 6. Folding concept.
(a) Front view. (b) Side view.
7. .
Fig. 7. Overall real system.
8. .
Fig. 8. Overall hardware structure.
9. .
Fig. 9. Control hardware.
,
. 제어 구조
4.
주행제어 4.1
.
, , .
ADC DSP
, RS-232
. 10 .
자세제어 4.2
. .
,
.
.
.
․ .
11 PD .
. 승하차 제어
4.3
12 .
on-off . UP DSP
PWM LMD 18200 .
. 급발진 및 급정거 방지 기능
4.4
.
. 13
.
실험 결과 III.
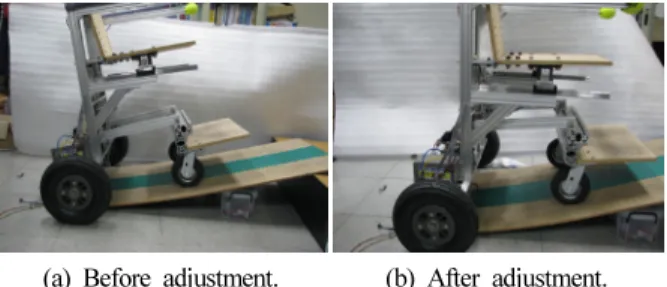
평형유지 실험 1.
,
. 14 (a)
(b) .
. 14(b)
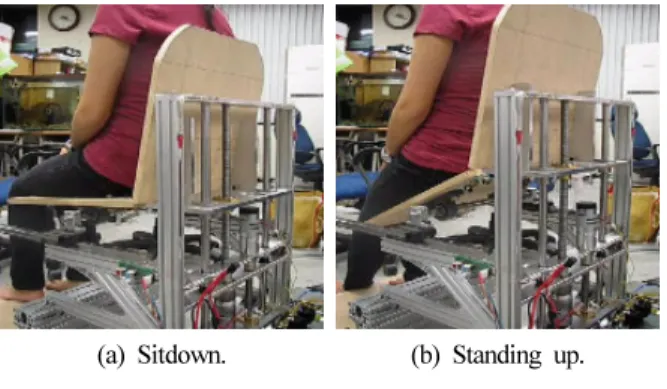
. . 하차 기능 실험 2.
. 15
.
10. .
Fig. 10. Control sequences diagram.
11. .
Fig. 11. Lean angle control block diagram.
12. .
Fig. 12. Lifting control sequence.
13. .
Fig. 13. Abrupt start and stop prevention control diagram.
(a) Before adjustment. (b) After adjustment.
14. .
Fig. 14. Experiment of stabilizing control.
15(b)
. 실외 주행 실험
3.
. .
16 .
7 .
.
.
.
. 17 .
18 .
결론 및 추후과제 IV.
, .
.
.
.
, .
.
, .
.
.
, .
, ,
. .
참고문헌
[1] H. J. Lee and S. Jung, “Guidance control of a wheeled mobile robot with human interaction based on force control,” International Journal of Control, Automation, and Systems Engineering, vol. 8, no. 2, pp. 361-368, Apr. 2010.
[2] HAL, http://www.cyberdyne.jp/english/robotsuithal/
[3] H. J. Jeon and S. Jung, “Design and experiment of an assistive device for a knee joint of a disabled person us- ing MR damper,” Journal of Institute Control, Robotics, and Systems (in Korean), vol. 16, no. 6, pp. 579-585, June 2010.
[4] H. J. Jeon and S. Jung, “Damping force control of a MR damper using modification of bouc-wen model for a walking assist device,” Korean Intelligent Robot Conference, pp. 451-454, 2009.
(a) Sitdown. (b) Standing up.
15. .
Fig. 15. Experiment of lifting up.
16. .
Fig. 16. Experimental environment.
(a) Going down. (b) Going up.
17. .
Fig. 17. Driving uphill experiment.
(a) Initial pose. (b) Taking off.
18. .
Fig. 18. Getting-off case.
[5] Stair climbing robot wheelchair, http://www.trendhunter.
com/trends/stair-climbing-robot-wheelchair-the-ibot-mobility -system
[6] Toyota wheelchair robot, http://robot.watch.impress.co.jp [7] MIT Robot wheel chair, http://web.mit.edu/newsoffice/
2008/wheelchair-0919.html
김 후 섭 2004
.
. , .
정 슬 1988
. 1991
. . 1997 ~
.
, ,
.
송 혜 수 2007
.
. , .