http://dx.doi.org/10.7236/JIWIT.2012.12.2.103
JIWIT 2012-2-13
신경망을 이용한 실외 군중 밀도 측정
Measurement of the Crowd Density in Outdoor Using Neural Network
송재원*, 안태기**, 김문현***, 홍유식****
Jae-Won Song, Tae-Ki An, Moon-Hyun Kim, You-Sik Hong
요 약 수동적인 보안감시 시스템의 문제점이 계속적으로 제기되면서 실시간으로 공공장소에서의 군중에 대한 관리 및 감독을 지원하는 자동화되고 지능적인 군중 밀도 측정에 대한 필요성이 증대되고 있다. 이에 따라, 군중의 밀도를 측정하기 위한 많은 연구가 시도되었으나 실시간 혼잡도 정보 취득이 어렵고, 조명변화 등에 취약한 한계가 드러났 다. 본 논문에서는 이러한 문제점을 해결하기 위해 군중 특징 정보로써 옵티컬 플로우를 검출하고 또한 Sobel 외곽선 추출 알고리즘에 의해 외곽선을 추출하여 각 특징을 입력으로 학습된 다층 신경망을 통해 실시간으로 실외 공공장소 에서의 군중 밀도를 측정하였다.
Abstract The population growth along with the urbanization, has caused more problems in many public areas, such as subway airport terminals, hospital, etc. Many surveillance systems have been installed in the public areas, but not all of those can be monitored in real-time, because the operators that observe the monitors are very small compared with the number of the monitors. For example, the observer can miss some crucial accidents or detect after considerable delays. Thus, intelligent surveillance system for preventing the accidents are needed, such as Intelligent Surveillance Systems. in this paper, we propose a new crowd density estimation method which aims at estimating moving crowd using images from surveillance cameras situated in outdoor locations. The moving crowd is estimated from the area where using optical flow. The edge information is also used as feature to measure the crowd density, so we improve the accuracy of estimation of crowd density. A multilayer neural network is designed to classify crowd density into 5 classes. Finally the proposed method is experimented with PETS 2009 images.
Key Words : video surveillance, optical flow, edge, neural network, crowd density
*정회원 (주) 비츠로시스
**정회원 한국철도기술연구원
***정회원 성균관대학교 정보통신공학부(교신저자)
****정회원 상지대학교 정보통신공학부
접수일자 2012년 2월 14일, 수정완료 2012년 3월 23일 게재확정일자 2012년 4월 13일
Received: 14 February 2012 / Revised: 23 March 2012 / Accepted: 13 April 2012
***Corresponding Author : [email protected] Dept. of Information and Communication Engineering, Sungkyunkwan University, Korea
Ⅰ. 서 론
최근 대도시화가 가속되고 있는 가운데 불특정 다수
를 상대로 한 범죄 및 테러 등의 위험이 증대되고 있다.
따라서, 공항, 철도역사 등 다양한 장소에 각종 센서와 폐 쇄회로 텔레비전(CCTV; Closed-Circuit TV)의 설치를
통한 보안감시가 활발히 이뤄지고 있다. 그러나, 현재 운 영되고 있는 영상 보안감시는 관리자가 지속적으로 감시 지역을 모니터링 해야 하는 수동적인 감시에 지나지 않 아 공공장소에서의 군중밀도를 실시간으로 측정하여 관 리자가 군중 관리 및 감독할 수 있도록 지원하는 지능적 인 보안에 대한 요구가 증대되고 있다.
앞서 언급한대로 군중밀도를 측정하기 위한 초기 연 구의 경우 군중 밀도 측정에 연구의 초점이 맞춰져 있기 보다는 인원계수나 추적에 초점을 두고 진행되었다. 객 체를 계수하여 군중밀도 추정에 활용하고자 하는 연구의 경우 인간의 신체 부위 중 특징으로 고려할 수 있는 머리 를 검출하여 객체를 계수하는 연구가 있었다[1]. 또한, 배 경이미지를 설정한 뒤 해당 픽셀이 객체에 속하는지 혹 은 배경에 속하는지를 판별하여 군중밀도를 측정하는 연 구 또한 진행이 되었다[2].
위와 같은 연구는 군중 자체의 움직임보다 설정 환경 내에서 소수의 객체를 인식하여 군중밀도를 측정하고자 하는 시도였다는 점에서 군중은 객체의 집합이라는 관점 으로 연구가 진행되었다.
반면, 객체 계수가 아닌 군중의 움직임에 초점을 맞추 어 군중밀도 측정을 시도한 연구 또한 존재한다. 먼저, 텍 스쳐 정보를 추출하여 자가조직화지도(Self Organi zation Map)를 이용해 군중밀도를 추정하는 연구[3]가 있 었으며, Minkowski 프랙탈 차원을 이용한 군중밀도 측 정도 시도되었다[4]. 해당 연구는 군중과 상관관계를 맺고 있는 특징 정보로써 텍스쳐 정보 및 프랙탈 차원을 활용 하였다는 점에서 군중 자체의 움직임에 집중한 연구이다.
그러나, 조명변화가 급격하거나 잡음이 심한 공공장소에 서는 텍스쳐 정보나 프랙탈 차원이 군중과의 상관관계를 잃는 경우가 있어 정확한 군중밀도 측정에 문제가 존재 한다. 또한, 객체가 이동할 수 있는 영상 전체 영역에 대 해 군중밀도를 측정하지 않고 영상에 나타나는 객체의 크기가 균일하고 배경이 복잡하지 않은 제한적인 지역만 을 ROI(Region Of Interest)로 설정하여 군중밀도를 측정 하였다는 점에서 한계가 있다.
본 논문에서는 자동화된 보안 감시 업무에 활용될 수 있는 군중밀 측정을 위한 특징 정보로써 객체의 움직임 을 추정하는 모션벡터 검출방식인 옵티컬 플로우와 움직 임 영역에 해당하는 객체의 외곽선 정보를 추출하였다.
또한, 카메라가 충분히 높은 곳에 위치하고 객체의 위치 에 따른 크기에 무관하게 각도가 적절히 조정되어 있어
실외 군중 영상으로서 매우 적절하다고 판단되는 PETS 2009 데이터셋을 선정하여 해당 영상을 신경망을 통해 매우 한산, 한산, 보통, 혼잡, 매우 혼잡 총 5단계의 군중 밀도 중 하나로 출력하였다.
본 논문의 제안방법은 군중 내 객체의 검출을 위한 배 경 제거 및 객체 검출 등의 영상처리 알고리즘을 사용하 지 않기 때문에 실시간으로 군중밀도 측정이 가능하다.
또한, 군중이 움직일 수 있는 영역 중에서도 군중의 움직 임을 쉽게 검출해낼 수 있는 영역으로 ROI를 설정해 군 중밀도를 측정했던 기존 연구와는 달리 객체가 영상의 어느 곳이든 위치할 수 있는 PETS 2009 데이터셋을 활 용하여 더 광범위한 영역에서 군중밀도를 측정하였다.
Ⅱ. 군중 특징 정보 추출
영상을 기반으로 한 군중밀도 측정을 위해서는 군중 밀도와 상관관계가 있는 특징 정보를 추출하는 것이 중 요하다. 군중밀도 측정을 위한 특징 정보 중 대표적인 것 으로 영상내 컬러의 분포나 텍스쳐, 외곽선 등의 특징 등 을 논의할 수 있다[5]. 본 논문에서는 군중밀도와 관련 있 는 특징 정보로써 객체의 움직임을 추정하는 옵티컬 플 로우와 움직인 영역에 해당하는 객체 외곽선 정보를 추 출하였다. 추출한 두 가지 군중 특징 정보는 신경망의 각 입력 노드의 값으로 입력되어 학습된 신경망을 통해 군 중밀도를 측정한다. 본 논문에서 제안한 군중밀도 측정 시스템은 그림 1과 같다.
그림 1. 군중밀도 측정시스템
Fig. 1. Crowd Density Estimation System
1. 옵티컬 플로우
옵티컬 플로우는 두 영상으로부터 선택된 2개의 점의 변위 변화를 나타내는 것으로써 이전프레임과 현재 프레 임 의 픽셀값의 변화를 통해 픽셀의 움직임을 추정한다
[6]. 이 방법은 물체의 이동 또는 운동에 관한 사항을 측정 하거나 인식하는데 기초정보가 되며 군중을 이루게 되는 객체의 움직임을 추정하는 방법으로 널리 사용되고 있다.
옵티컬 플로우를 검출하기 위해서는 몇 가지 가정이 필요하다. 첫 번째 가정은 공간 일관성이라 불리는 것으 로, 특정 픽셀의 움직임에 주목했을 때 해당 픽셀의 주변 에 위치한 픽셀들의 움직임 또한 거의 동일하게 움직인 다는 것이다. 두 번째 가정은 화소값 불변 제약조건으로, 한 점의 픽셀값은 시간이 변할 경우에도 일정하게 유지 된다는 가정이다. 이러한 가정을 하지 않고 픽셀의 움직 임을 추정하고자 하면 프레임마다 변화하는 픽셀의 변화 를 모두 고려해야 하므로 제대로 움직임을 추정하기 어 렵다.
위의 두 가지 가정을 이용해 픽셀값의 연속적인 변화 를 이용하여 시간과 위치의 함수로 영상 내의 모든 픽셀 의 움직임을 모델링 할 수 있다. 픽셀값을 함수
로 표현한 뒤 테일러 급수 전개에 적용하면 아래의 식 (1)과 같다.
(1)
만약, 아주 짧은 시간이 변화했을 경우, 즉, 시간 t+dt 에서의 이미지가 시간 t에서의 원본 이미지에서 dx, dy만 큼 이동되어 얻은 결과 이미지라면, 식 (2)와 같이 표현될 수 있다.
(2)
위의 두 식을 이용하여 연쇄 법칙(Chain Rule)을 적용 하여 전개하면,
(3)
위의 식 (3)을 얻을 수 있다. 항의 경우 시 간에 따른 픽셀값의 변화를 의미하고, 항의 경우 x성분을 기준으로 하였을 때의 픽셀값의 변화, 마지막으 로 항은 y성분을 기준으로 하였을 때의 픽셀값 의 변화를 나타내므로 모두 측정이 가능한 수치들이다.
이 때, 와 는 x와 y방향으로의 속도 값으 로, 아래의 식 (4)와 같이 표현할 수 있으며, 해당 u, v가 우리가 구하고자 하는 옵티컬 플로우를 나타낸다.
,
(4)
식 (4)를 기반으로 다시 표현하면,
(5)
위의 식 (5)와 같이 표현가능하다. 식 (5)를 통해 우리 가 유추할 수 있는 바는 같은 위치에서의 dt 시간동안의 시간에 대한 이미지 픽셀값의 변화는 위치에 대한 명암 값의 기울기와 속도 두 가지의 결합을 통해 표현할 수 있 다는 점이다. 그러나, 위의 식 (5)만으로는 미지수는 2개 이나 주어진 식은 1개이므로 우리가 원하는 옵티컬 플로 우를 유일하게 정할 수 없음을 의미하며, 명암값 변화의 방향에서 특정요소를 제공할 뿐이다. 각 점에 대해 한 개 의 제약 조건을 이용하면 두 개의 미지수 u, v를 구할 수 없으며, 이것은 우리가 위의 가정만으로는 유일한 옵티 컬 플로우를 구할 수 없음을 나타낸다.
따라서, 옵티컬 플로우를 계산해 내기 위해 많은 방법 들이 시도되어 왔는데 그 중에서 가장 대표적인 방법은 미분을 이용한 검출 방법이다. 미분을 이용한 옵티컬 플 로우 검출 방법 중에서 우리는 Lucas-Kanade[7] 방법을 이용하여 옵티컬 플로우를 검출하였다.
Lucas-Kanade 방법은 작은 window 에서 옵티컬
플로우를 표현하는 상수 모델을 이용하기로 가정하자.
∈을 정의한다. 이미지의 중심 값의 가중 치를 다른 것 보다 크게 놓는데, 특히 window 함수는 중 심 값을 선호한다. 중심 픽셀의 옵티컬 플로우는 식 (6)에 의해서 계산될 수 있다.
∈
∇ ∙
(6)
식 (6)의 결과를 미분하여 표현하면,
(7)
식 (7)과 같은 결과를 얻을 수 있으며, 이를 풀기 위해 서 행렬의 형태로 변환하면,
⋮
⋮
×
⋮
×
⋯ ×
(8)
식 (8)과 같이 표현 가능하다. 이에 따라 식 (9)와 같이 옵티컬 플로우를 구할 수 있다.
(9) 아래의 그림 2와 그림 3은 각각 군중 밀도가 매우 한 산한 경우와 매우 혼잡한 경우 두 가지 군중 밀도 상황에 대해 각 군중밀도별 연속한 두 프레임과 검출된 옵티컬 플로우의 결과를 보여주고 있다. 군중밀도가 매우 한산 한 경우에 해당하는 그림 2의 옵티컬 플로우 검출 결과 와 군중밀도가 매우 혼잡한 경우에 해당하는 그림 3의 옵 티컬 플로우 검출 결과를 통해서 군중 밀도가 증가할수 록 옵티컬 플로우 검출량이 증가하는 것을 확인할 수 있 다. 이것은, 영상내 군중의 밀도가 늘어나게 되면, 군중의 움직임 또한 증가하며, 이것은 필연적으로 객체의 움직 임을 검출하는 옵티컬 플로우의 검출량의 증가로 이어지 는 것을 반증한다. 이로써, 군중 밀도를 측정하기 위한 좋 은 특징으로써 옵티컬 플로우는 군중 밀도와 밀접한 상 관관계를 맺고 있는 군중 특징 정보로써 활용할 수 있다.
(a) 이전 영상 (b) 현재 영상
(c) 옵티컬 플로우
그림 2. 옵티컬 플로우 검출 결과(매우 한산) Fig. 2. Result of Optical Flow(Very Low)
(a) 이전 영상 (b) 현재 영상
(c) 옵티컬 플로우 그림 3. 옵티컬 플로우 검출 결과(매우 혼잡) Fig. 3. Result of Optical Flow(Very High)
2. 외곽선
군중 밀도와 관련된 두 번째 특징 정보로써 군중을 구 성하고 있는 객체의 외곽선을 활용할 수 있다. 외곽선을 검출하는 영상처리 알고리즘으로는 Gradient, Sobel, Prewitt, Roberts, Laplacian, Canny 등과 같이 많은 알고 리즘이 존재한다. 이러한 알고리즘 중에서 객체의 외곽 선을 가장 효과적으로 표현하는 Sobel 외곽선 검출 알고 리즘을 사용하였다. 취득한 영상 전체에 대해 외곽선 검 출 알고리즘을 적용하게 되면 전경 영역에 해당하는 군 중을 이루는 객체의 외곽선 뿐만 아니라 배경영역의 외 곽선까지 검출하게 된다. 군중 밀도를 추정하는데 있어 배경영역의 외곽선은 불필요한 정보이므로 해당 정보는 제거해도 무방하다. 따라서, 군중 밀도를 추정하기 위한 외곽선 검출 알고리즘을 적용하기 전에 효과적으로 전경 과 배경을 분리해야 한다. 전경과 배경을 분리하는데 있 어 앞서 군중 특징 정보로써 검출한 옵티컬 플로우 정보 를 활용하고자 한다. 옵티컬 플로우가 검출된 영역은 군 중의 움직임이 검출된 영역으로써 움직임이 없는 영역인 배경과 분리할 수 있다. 따라서, 옵티컬 플로우 정보가 검 출된 전경영역을 대상으로 외곽선을 검출하여 전경과 배 경을 분리하는 알고리즘을 추가적으로 사용하지 않고 효 율적으로 전경영역의 검출이 가능하며, 검출된 전경영역 에 대하여 각 객체의 외곽선을 추출할 수 있다. 옵티컬 플로우가 검출된 영역과 군중 밀도를 추정하고자 하는 현재 영상을 산술연산을 통한 영상 결합을 이용하여 전 경 영역을 검출한 결과는 아래의 그림 4와 같다.
그림 4. 전경영역 검출결과 Fig. 4. Foreground Region
위의 그림 4와 같이 군중의 움직임 영역에 해당하는
옵티컬 플로우 영역으로부터 검출된 전경 영역을 대상으 로 영상 이진화를 적용하면 그림 5와 같은 결과를 얻을 수 있다. 최종적으로, 그림 5의 이진화된 전경영역을 대 상으로 Sobel 외곽선 검출 알고리즘을 적용하면 그림 6 의 결과를 통해 확인할 수 있듯이 객체의 움직임이 존재 하는 영역의 외곽선을 얻을 수 있다. 이렇게 검출된 외곽 선 픽셀의 수는 신경망의 입력층의 입력값으로써 활용할 수 있다.
그림 5. 이진영상 Fig. 5. Binary Image
그림 6. 외곽선 검출 영상 Fig. 6. Contour Image
Ⅲ. 신경망 모델
신경망은 인간의 생물학적 신경 세포를 모델링하여 구현한 방식으로 여러 개의 층으로 구성된 비선형 네트 워크이며 각 층은 여러 개의 노드로 구성된다. 본 연구에 서 제안하는 신경망은 은닉층을 포함하는 다층 신경망으
로 군중 특징 정보인 옵티컬 플로우의 수와 객체 외곽선 픽셀의 수 2개의 입력노드를 가지는 입력층과 6개의 노 드를 가지는 은닉층, 마지막으로 0과 1사이의 실수를 출 력하여 5단계의 군중도 중 하나를 출력하는 1개 노드의 출력층으로 구성하였다. 본 논문에서 군중 밀도를 추정 하기 위해 제안하는 다층 신경망은 아래의 그림 7과 같 다. 그림 7로부터 입력층과 은닉층, 출력층으로 구성된 신경망을 확인할 수 있으며, 특히 출력층에서는 매우 한 산, 한산, 보통, 혼잡, 매우 혼잡 총 5단계의 군중밀도 중 한 가지가 출력된다.
그림 7. 신경망
Fig. 7. Neural Network
Ⅳ. 실험 및 결과
다층 신경망으로 구성한 군중 밀도 추정 결과를 얻기 위해서는 군중 밀도를 측정하고자 하는 영상을 취득해야 한다. 군중 밀도를 추정하기 위한 적합한 영상은 카메라 가 충분히 높은 곳에 위치해 있어 군중을 이루는 각 객체 의 크기가 균일하며, 각도 또한 객체의 위치와 상관없이 객체의 크기가 변하지 않는 실외 군중 영상이다. 본 논문 에서는 군중 밀도를 추정하기 위한 영상으로 PETS 2009 이미지 데이터셋을 선정하여 실험하였다. 아래의 표 1은 PETS2009 영상에서 출현하는 객체의 수와 신경망의 출 력값에 따른 5단계의 군중밀도 결과를 보여주고 있다.
인원수(명) 출력값 군중 밀도
0∼8 0.0∼0.2 매우 한산(Very Low) 9∼16 0.21∼0.4 한산(Low) 17∼24 0.41∼0.6 보통 (Medium) 25∼32 0.61∼0.8 혼잡 (High) 33∼40 0.81∼1.0 매우 혼잡(Very High) 표 1. 5단계 군중밀도
Table 1. 5 Classes of Crowd Density
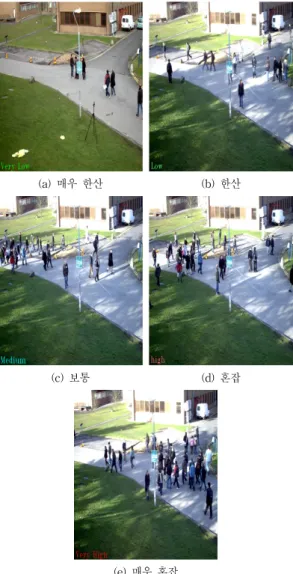
신경망을 이용한 실외 군중 밀도 추정 결과는 그림 8 에서 확인할 수 있다.
(a) 매우 한산 (b) 한산
(c) 보통 (d) 혼잡
(e) 매우 혼잡
그림 8. 군중밀도 검출결과
Fig. 8. Results of Crowd Density
영상내의 군중밀도를 파악하기 위해 군중밀도 출력은 PETS 2009 데이터셋의 영상에서 군중의 등장이 가장 적 은 영역이었던 좌측 아래에 표시하였다. 또한, 관리자가 신속하게 군중 밀도를 파악할 수 있도록 군중 밀도가 한 산한 경향을 띠는 경우에는 초록색 계열, 혼잡한 경향을 띠는 경우에는 붉은색 계열로 표시하여 관리자의 시각적 인식을 고려하여 군중밀도를 표시하였다.
※ 본 연구는 국토해양부 도시철도표준화2단계연구개발사업의 연구비지원(07도시철도표준화A01)에 의해 수행 되었습니다.
Ⅴ. 결 론
기존의 군중 밀도 추정 연구는 조명변화가 급격하거 나 나뭇가지의 움직이나 객체 겹침과 같이 객체를 검출 하기 어려운 공공장소에서 정확한 군중 밀도 추정에 한 계를 가지고 있었으며, 객체가 이동할 수 있는 영상 전체 영역에 대해 군중밀도를 측정하지 않고 객체의 크기가 균일하고 배경이 복잡하지 않은 제한적인 지역만을 ROI 로 설정하여 군중밀도를 측정하였다는 점에서 한계가 있다.
본 논문에서는 자동화된 보안 감시 시스템에 적용 가 능한 군중밀도 측정을 위해 조명변화에 강인한 군중 특 징 정보인 옵티컬 플로우와 객체의 외곽선 픽셀 정보를 활용하였다. 또한, ROI를 선정하지 않고 실외 공공장소 영상 모든 장소에서 군중이 등장해도 군중밀도에 반영할 수 있는 알고리즘을 제안하였다.
또한, 군중 특징 정보로써 옵티컬 플로우의 수와 객체 외곽선 픽셀 수 두 개의 정보를 입력값으로 하여 다층 신 경망을 이용해 5단계의 군중밀도를 학습된 신경망으로 추정함으로써 보다 지능적인 감시업무에 이바지 할 수 있도록 하였다.
참 고 문 헌
[1] X. Zhang and G. Sexton, “Automatic human head location for pedestrian of counting”, Proc. Int.
Conf. Image Processing and Its Applications, Vol.
2, pp. 535-540, 1997.
[2] J. Yin, S. Velastin, and A. Davies, “Image Processing Techniques for Crowd Density Estimation Using a Reference Image”, Proc. 2nd Asia-Pacific Conf. Comput. Vis. Vol. 3, pp. 6–
10, 1995.
[3] A. Marana, S. A. Velastin, L. Costa, and R.
Lotufo, “Automatic estimation of crowd density using texture”, Safety Sci. Vol. 28, No.3, pp. 165 –175, 1998.
[4] A. Marana, L. Costa, R. Lotufo, and S. A.
Velastin, “Estimating crowd density with Minkowski fractal dimension”, Proceedings of IEEE International Conference on Acoustics, Speech, and Signal Processing, Vol. 6, pp. 3521 –3524, 1999.
[5] A. C. Davies, J. H. Yin and S. A. Velastin, Crowd Monitoring Using Image Processing”, IEE Electronic and Communications Engineering Journal, Vol. 7, No. 1, pp. 37-47, 1995.
[6] B.K.P. Horn and B.G. Schunck, “Determining Optical Flow”, Artificial Intelligence, vol. 17, pp.
185–203, 1980.
[7] B. D. Lucas and T. Kanade, "An iterative image registration technique with an application to stereo vision", Proceedings of Imaging Understanding Workshop, pp. 121-130, 1981.
저자 소개
송 재 원(Song, Jae-Won)(정회원)
∙1993년 : 영남대학교 전기공학과 (학 사)
∙1995년 : 영남대학교 전기공학과 (석 사)
∙1995 ~ 현재 : (주)비츠로시스 연구소 장
<관심분야 : 인공지능, 컴퓨터비전, 스마트그리드>
안 태 기(An, Tae-Ki)(정회원)
∙1993년 : 경북대학교 전자공학과 (학 사)
∙1996년 경북대학교 전자공학과 (석사)
∙2011년 성균관대학교 전자전기컴퓨터 공학과 (공학 박사)
∙1996년-현재 : 한국철도기술연구원 책임연구원
<관심분야 : 멀티미디어 통신, 영상분석, 인공지능>
김 문 현(Kim, Moon-Hyun)(정회원)
∙1978년 서울대학교 전자공학과 (학사)
∙1980년 한국과학기술원 전기 및 전자 공학과 (공학 석사)
∙1988년 Univ. of Southern California (공학 박사)
∙1988~ 현재 : 성균관대학교 정보통신 공학부 교수
<관심분야 : 컴퓨터비젼, 패턴인식, 인공지능>
홍 유 식(Hong, You-Sik)(종신회원)
∙1984년 경희대학교 전자공학과 (학사)
∙1989년 뉴욕공과대학교 전산학과 (석 사)
∙1997년 경희대학교 전자공학과 (박사)
∙1985년-1987년 대한항공(N.Y.지점 근 무)
∙1989년-1990년 삼성전자 종합기술원 연구원
∙1991년-현재 상지대학교 컴퓨터공학부 교수
∙2000년-현재 한국 퍼지 및 지능시스템학회 이사
∙2004년-2008 대한 전자 공학회 ITS 분과위원장
∙2001년-2003 한국 정보과학회 편집위원
∙2001년-2003 한국 컴퓨터 교육산업학회 이사, 편집위원
∙2004-현재 : 건설교통부 ITS 전문심사위원
∙2004-현재 : 원주 시 인공지능신호등 심사위원
∙2005-현재 : 정보처리학회 이사
∙2005-현재 : 인터넷 정보학회 이사
∙2005-현재 : 지능시스템학회 강원지부 회장
∙2006-현재 : 인터넷 방송통신 TV학회 부회장
∙2006-현재 : 대한전자공학회 컴퓨터소사이어티 회장
<관심분야 : 퍼지 시스템, 전문가시스템, 신경망, 교통제어>