1. 서 론
초기 설계단계에서의 주 기관의 기진력 및 프로펠러 기진력 에 대한 정확한 예측은 실선 진동제어에 있어 아주 중요하다.
주 기관의 경우 제조업체에서 특정 성분에 따른 기진력 값 을 제공하고 있어 진동해석 및 제어가 비교적 용이한 편이나, 후자의 경우 통상 캐비테이션 터널(Cavitation tunnel)에서 모 형시험을 통하여 프로펠러 유기 변동압력(Propeller-induced fluctuating pressure)을 계측하여 실선에 확장 적용하고 있다.
또한, 컨테이너선과 같이 프로펠러 직경이 상대적으로 큰 선 박이나 Ice class 선박과 같이 프로펠러 직경이 크고 Skew angle이 상당히 작은 경우, 프로펠러 고차 조화성분 변동압력 이 커지게 된다. 이는 선미구역 및 거주구의 국부진동을 유발 하고 상대적으로 큰 소음을 유발할 수 있어 초기 진동제어를 위하여 그 응답에 대한 신뢰성 있는 실선 추정이 필요하나, 모형시험에서 계측한 변동압력의 경우 실선에서 계측한 그것 과 큰 차이를 보이는 경우가 많아 초기 진동제어가 힘든 경우 가 종종 발생하고 있다.
본 사례연구는 당 사에서 건조하여 인도한 소형(1800TEU) 컨테이너선의 설계초기 야기된 진동문제에 대한 일련의 방진 대책을 소개하고, 실선 진동계측을 통한 진동제어 대책의 유 효성 검증 및 실선에서 계측한 프로펠러 유기 변동압력 (Propeller-induced fluctuating pressure)을 모형시험에서 얻 은 결과와 비교 검증하고자 함에 있다.
국내에서의 실선 프로펠러 변동압력 계측은 송인행(2005) 등이 105K 탱커선을 대상으로 Bottom plug 내부에 압력센서 를 장착하여 선체내부에서 변동압력을 계측하였으며 이를 모 형선에서의 계측결과와 비교 검토하였으며, 박진화 (2003, 2006) 등은 자석식 변동압력 계측기법을 개발하여 LNG 운반 선, 컨테이너선, 원유운반선 등의 선박에 대하여 변동압력 계 측을 통한 프로펠러의 기진력 특성을 연구한 바 있다.
2. 선박의 주요제원
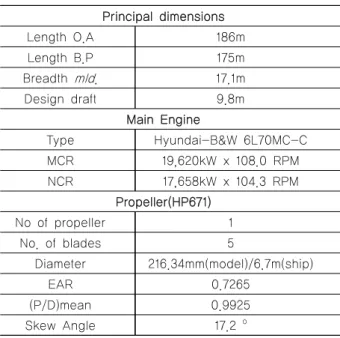
Fig. 1과 같이 선주의 요구로 선루의 위치가 선미에 위치하 여 거주구 진동에 불리한 구조를 가지고 있다. 1800TEU 컨테 이너선의 주요 제원은 Table 1과 같다.
Fig. 1 Side view of 1800TEU container
Table 1 Main particulars of 1800TEU container Principal dimensions
Length O.A 186m
Length B.P 175m
Breadth mld . 17.1m
Design draft 9.8m
Main Engine
Type Hyundai-B&W 6L70MC-C
MCR 19,620kW x 108.0 RPM
NCR 17,658kW x 104.3 RPM
Propeller(HP671)
No of propeller 1
No. of blades 5
Diameter 216.34mm(model)/6.7m(ship)
EAR 0.7265
(P/D)mean 0.9925
Skew Angle 17.2
o소형 컨테이너선 진동제어
사례 연구 서해수 (㈜현대미포조선)
3. 진동해석 및 진동제어
3.1 진동해석
3.1.1 초기 진동해석
설계 초기단계에서 선체 저차 고유진동수를 추정하기 위하 여 초기진동해석을 수행하였다. 해석결과 Table 2와 같이 오 차범위 내 상용 운항영역에서 주 기관의 2차 수직 불평형 모 멘트와 선체 상하 4절 진동(밸러스트 상태)과 5절 진동(만재 상태)과의 공진발생 가능성이 큰 것으로 예측되었다.
따라서, 구조보강에 의한 공진회피 설계가 매우 힘들 것으 로 판단되고 관련 기진력 값도 큰 것으로 나타나, 주 기관에 2 차 기계식 역기진기(Mechanical balancer)를 선수미에 모두 설치하는 것으로 결정하였다.
Table 2 Estimation results on natural frequencies of hull girder vibration
Mode No. 1 2 3 4 5
Full load(Hz) 0.85 1.58 2.27 2.95 3.60 Ballast(Hz) 1.01 2.01 2.59 3.75 4.58
Fig. 2 Mechanical balancer for main engine(6L70MC-C)
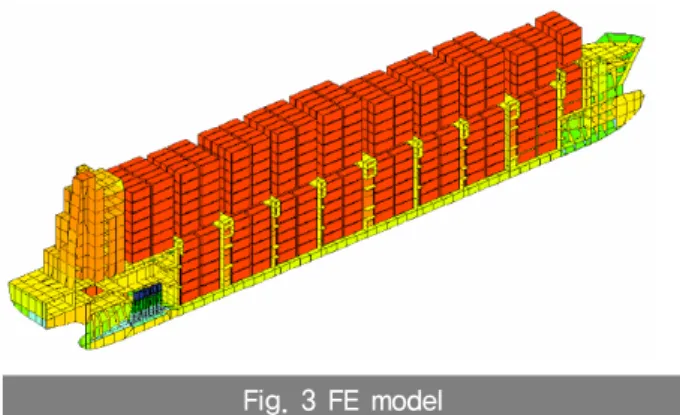
3.1.2 전선 진동해석 전선 진동해석 모델은 Fig. 3에 나타내었다.
Fig. 3 FE model
1) 고유진동해석
3가지 하중적재 조건(Ballast, design draft & scantling draft condition)에 따른 고유진동 해석결과를 Table 3에 정리 하였다. 해석결과 밸러스트 상태(Ballast condition) 3.5Hz에 서 선체 상하 4절 모드가 나타나는 것으로 예측되어 초기 진 동해석과 유사한 결과를 얻었다.
Table 3 Natural frequencies of lowest 8 vibration modes
Fig. 4 4-node vertical bending mode under ballast
condition : f=3.5Hz
1xPBF Ballast Draft
4.88kPa Design Draft
4.35kPa Scantling Draft
3.92kPa 2) 주요 기진력
주 기관으로부터 기인된 기진력의 크기를 Table 4에 나타 내었다. 주 기관의 특성상 2차 수직 불평형 모멘트가 2,276kNm로 큰 편임을 알 수 있다.
Table 4 Main excitation of main engine Main Engine : 6L70MC-C
2
ndExternal moment 2,276kNm
6
thH-moment 1,233kNm
2
ndX-moment 266kNm
3
rdX-moment 692kNm
4
thX-moment 609kNm
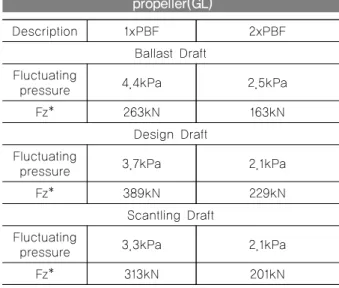
프로펠러에 기인된 변동압력의 모형시험 결과는 Table 5에 그리고, 추정된 변동압력 및 선체 작용력(Surface force)은 Table 6에 각각 나타내었다. Table 7에서는 DnV 의 통계학적 방법(1985)에 의해 구한 변동압력 크기를 보여주고 있다.
Table 5 Measured fluctuating pressure under design draft condition by model test (HP671) Description 1xPBF* 2xPBF* 3xPBF*
Fluctuating
pressure 3.99kPa 0.7kPa 0.54kPa Note : “*” mark – Propeller Blade Frequency
Table 6 Estimated fluctuating pressure induced by propeller(GL)
Description 1xPBF 2xPBF
Ballast Draft Fluctuating
pressure 4.4kPa 2.5kPa
Fz* 263kN 163kN
Design Draft Fluctuating
pressure 3.7kPa 2.1kPa
Fz* 389kN 229kN
Scantling Draft Fluctuating
pressure 3.3kPa 2.1kPa
Fz* 313kN 201kN
Note : “*” mark – Vertically integrated surface force induced by fluctuating pressure
Table 7 Estimation of fluctuation pressure Induced by propeller by statistical methods of DnV(1985)
3) 강제 진동해석
3가지 하중적재 조건(Ballast, design draft & scantling draft condition)에 대하여 주요 기진력에 따른 강제 진동해석 결과를 아래와 같이 정리하였다.
(1) 주 기관의 기진력에 의한 응답
해석결과 Fig. 5와 같이 밸러스트 상태에서 주 기관 2차 수 직 불평형 모멘트에 의한 응답치의 크기가 조타실(Wheel house) 종방향으로 105 rpm(3.5Hz)에서 25mm/s 예측되었다.
이는 초기진동해석 및 고유진동 해석결과로부터 선체 상하 4 절 진동 모드와의 해당 가진 주파수와의 공진 및 기진력이 커 서 나타나는 이상진동으로 이를 제어하기 위한 주 기관 역기 진기 설치 결정은 적절하다고 판단된다. 주 기관의 기타 성분 에 대한 진동 응답값은 비교적 양호한 편으로 나타났다.
Fig. 5 Vibration amplitude due to main engine 2nd order excitation under ballast condition
(2) 프로펠러 기진력에 의한 응답
해석결과 Fig. 7과 같이 계획만재 흘수 조건(Design draft
condition)에서 프로펠러 1차 조화 함수 크기(1xPBF)에 의한
진동 응답값이 조타실 종방향으로 최대 11.2mm/s로 설계기준
을 초과하는 것으로 예측되었다. 이는 상용운항 대부분의 영
역에서 큰 응답치를 보였으며, Fig. 6과 같이 선루의 종방향
모드와 선미의 수직방향 모드 진동이 연성되어 나타나지만 상 대적으로 큰 선체 작용력에 기인된 것으로 판단된다. 프로펠 러 2차 성분에 의한 기진력은 비교적 양호한 편이었다.
Fig. 6 Mode shape due to 1xPBF under design draft condition : f=8.7Hz
<a> Ballast condition
<b> Design draft condition
<c> Scantling draft condition Fig. 7 Vibration amplitude due to 1xPBF
3.2 진동제어
3.2.1 주 기관 진동제어
상기에서 언급한 바와 같이 초기진동해석에서 유추한 고유 진동수와 전선진동에서 구한 고유진동수 및 이에 따른 응답값 은 저차 고유진동 모드예측 및 제조업체에서 제공된 기진력의 값으로 비교적 정확한 진동특성을 예측한 것으로 판단되므로, 2차 수직 불평형 모멘트에 의한 과대진동의 제어대책으로 주 기관에 양방향 역기진기 설치는 현 단계에서 가장 적절한 진 동회피 대책 이라 판단된다.
3.2.2 프로펠러 진동제어
해석결과로부터 프로펠러 1차 조화성분(1xPBF)에 대한 기존 프로펠러(HP671)의 변동압력을 줄이기 위하여 프로펠러의 날 개 수를 5개에서 6개로의 변경을 초기 검토하였으나, 변동압 력이 약 30% 감소하는 반면 선속의 감소 및 선루 국부진동 발 생 염려로 적용 하지 않았으며, Vortex generator등도 검토하였 으나 최종적으로 고스큐 프로펠러(Highly-skewed propeller, HP670) 적용을 통한 변동압력 감소 및 선체구조 보강을 통한 진동응답 감소 방향으로 다음과 같이 검토하였다.
1) 고스큐 프로펠러(Highly-skewed propeller) 적용
변경된 프로펠러에 대한 기본 제원은 Table 8과 같으며, 모형시험에서 변동압력의 크기는 Table 9와 같다. 변동압력 계측결과 HP671에 비해 20.6% 정도 감소하였다. 따라서, 선 체의 진동 응답치 또한 20.6%로 선형적인 감소가 예상된다.
Table 8 Principal particulars of propeller Propeller(HP670)
No of propeller 1
No. of blades 5
Diameter 216.34mm(model)/6.7m(ship)
Area ratio 0.7260
(P/D)mean 0.9801
Skew Angle 29.75
oTable 9 Measured fluctuating pressure under design draft condition (HP670)
Description 1xPBF 2xPBF 3xPBF
Fluctuation
pressure 3.17kPa 0.34kPa 0.38kPa
2) 선체구조 변경
최적의 선체 보강안을 찾기 위해서 문제시된 계획만재 흘 수 조건에 한하여 전선진동해석을 수행하였다. 선루 및 선미, 기관실 구조의 변경을 수행하여 재차 진동해석을 수행하였다.
선루의 선미, 측면, 선수 격벽에 대하여 두께를 증가시켰지만 진동 감소치는 미미하였다. 따라서, 선미 및 기관실 구조의 보 강이 진동을 저감시키는 것이 유효 적절하다고 판단되어 기기 류 등과의 간섭을 최소화 하는 범위에서 Fig. 8 과 같이 구조 변경을 한 후 강제 진동해석을 수행한 결과 기존대비 약 15%
정도의 진동 응답의 감소가 있는 것으로 예측되었다.
Fig. 8 Reinforcement plan
고스큐 프로펠러 적용 및 선체구조 변경으로 인해 약 36%
정도의 진동저감 효과가 있는 것으로 판단되었으며, 최종적으 로 진동응답이 약 7.5mm/s로 예측되어 기존보다 약 32%정도 감소하는 것으로 나타났다. 당 선박의 경우 거주구에 ISO6954-1984(E) 규정을 적용을 받음으로, MRV (Maximum Repetitive Value)값에 대한 파고율(Crest factor) 적용문제로 인해 여전히 허용치에 대한 문제가 제기되었다. 따라서, 선루 의 진동을 제어하기 위하여 Radar mast 뒤쪽 Compass deck
상에 전기식 역기진기(Electric balancer)설치를 검토하였다.
그러나, 변동압력의 실선추정에 대한 불확실성과 그에 따른 진동응답 예측의 불확실성이 존재하므로, 실선에 대한 진동계 측 후 문제발생시 설치하는 것으로 결정하였다. 다만 사 후 문제 발생시 설치시간 및 비용을 최소화하기 위해 역기진기 하부 보강과 관련 케이블 등을 사전에 설치하였다.
4. 실선 변동압력 및 진동계측
계측조건은 시운전 및 재화상태에서 수행하였으며 Table 10에 나타내었다. 해상 상태는 두 조건 모두 양호하였다. 실선 변동압력 계측은 HMRI에 의뢰하였으며, 진동계측은 당사에서 수행하였다.
Table 10 Measuring condition Sea trial condition
Sea state 1
Draft Da 3.995m
Df 7.525m
Displacement abt. 17,334Ton Main engine load 60~111rpm
Loaded condition
Measuring route Shanghai ~ Hongkong
Sea state 1
Draft Da 9.87m
Df 10.22m
Displacement 33,102Ton
Main engine load 60~111rpm
4.1 실선 변동압력 계측
실선 변동압력 계측을 위해 Bottom Plug를 선체외판에 시 공한 후 압력센서를 설치하여 선체 내부에서 변동압력을 직접 계측할 수 있도록 하였다. 이는 송인행(2005) 등이 개발한 실 선계측 방법과 유사한 방법이다.
영구형 Socket 및 Plug의 경우 표준 Plug와 동일한 재질을
사용하였으며, 계측용 Plug의 경우 시운전 설치 후 1항차 계
측시점까지 Plug의 교체가 없도록 하기 위하여 수밀 등을 고
려하여 황동재질을 사용하였다. 압력센서는 Core bolt 타입을
사용하였다. Bottom plug type 및 계측용 압력 센서를 Fig. 9
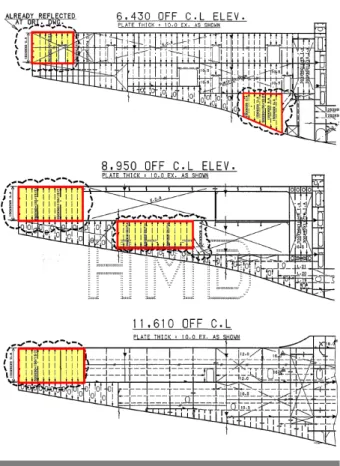
에 나타내었고, 관련사진은 Fig. 10에 나타내었다. 계측 위치
는 Fig. 11과 같이 선미 프로펠러 직상부 외판 주위에서 우현
에 7개 좌현에 2개를 설치하였다.
<Permanent plug after measurement>
<Temporary plug for measurement>
Fig. 9 Special type bottom plug & sensor
Fig. 10 Photograph of special type bottom plug and sensor
Fig. 11 Measuring locations for propeller-induced fluctuating pressure
재화상태에서의 변동압력 계측은 운항여건 등을 고려하여 Table 11과 같이 6개소로 제한하였다.
Table 11 Measuring locations Loading condition Measuring points
Ballast condition All of the points Loaded condition 6 points
(C, CF,CA,CS,CP,CA)
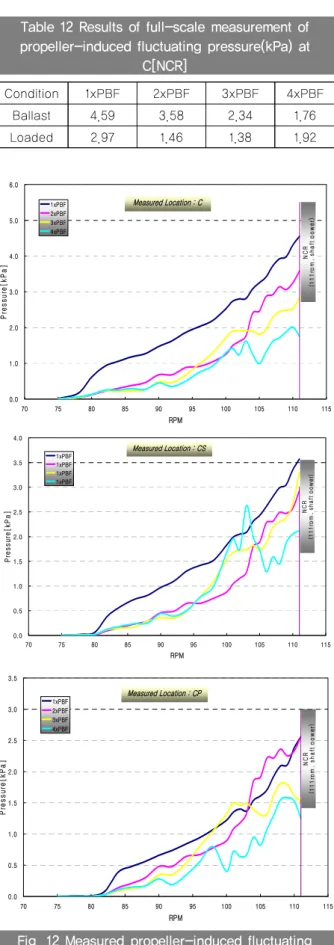
프로펠러 직상부(C) 지점의 변동압력 계측결과를 Table 12
에 정리하였다. 밸러스트 및 재화상태에서 프로펠러 회전수에
따른 변동압력값의 이력은 C, CS, CP 지점에 대하여 Fig. 12
및 Fig. 13에 대표적으로 나타내었으며, NCR에서의 각 재화상
태에 따른 변동압력의 크기를 Fig. 14에 도식화 하였다.
Table 12 Results of full-scale measurement of propeller-induced fluctuating pressure(kPa) at
C[NCR]
Condition 1xPBF 2xPBF 3xPBF 4xPBF
Ballast 4.59 3.58 2.34 1.76
Loaded 2.97 1.46 1.38 1.92
0.0 1.0 2.0 3.0 4.0 5.0 6.0
70 75 80 85 90 95 100 105 110 115
RPM
Pressure[kPa]
1xPBF 2xPBF 3xPBF 4xPBF
NCR (111rpm, shaft power) Measured Location : C
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0
70 75 80 85 90 95 100 105 110 115
RPM
Pressure[kPa]
1xPBF 1xPBF 1xPBF 1xPBF
NCR (111rpm, shaft power) Measured Location : CS
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5
70 75 80 85 90 95 100 105 110 115
RPM
Pressure[kPa]
1xPBF 2xPBF 3xPBF 4xPBF
NCR (111rpm,shaftpower) Measured Location : CP
Fig. 12 Measured propeller-induced fluctuating pressures under ballast condition
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0
70 75 80 85 90 95 100 105 110 115
RPM
Pressure[kPa]
1xPBF 2xPBF 3xPBF 4xPBF
NCR (111rpm, shaft power) Measured Location : C
0.0 0.5 1.0 1.5 2.0 2.5 3.0
70 75 80 85 90 95 100 105 110 115
RPM
Pressure[kPa]
1xPBF 2xPBF 3xPBF 4xPBF
NCR (111rpm, shaft power) Measured Location : CS
0 0.5 1 1.5 2 2.5
70 75 80 85 90 95 100 105 110 115
RPM
Pressure[kPa]
1xPBF 2xPBF 3xPBF 4xPBF
NCR (111rpm, shaft power) Measured Location : CP
Fig. 13 Measured propeller-induced fluctuating pressures under loaded condition
계측결과로부터 프로펠러 변동압력은 프로펠러 1차 조화
성분(1xPBF)뿐만 아니라 고차 조화성분에도 크게 지배되는 것
으로 나타났으며, 프로펠러 회전수의 증가에 따라 변동압력크
기도 전반적으로 증가함을 알 수 있다. 특히 재화상태가 밸러
스트 상태보다 NCR로 근접할수록 변동압력이 상대적으로 크
게 증가하는 경향을 보였다. 본 선박의 경우 변동압력의 증가
는 Fig. 15와 같이 프로펠러 회전수의 5승에 비례하여 증가하
는 양상을 보였으며, 응답값은 고차항으로 갈수록 감소하는 형태를 보이나, 재화상태에서 프로펠러 4차 조화성분(4xPBF) 이 비교적 크게 나타났다.
Fig. 14 Measured fluctuating pressures at NCR under ballast & loaded condition
Fig. 15 Tendency of propeller-induced fluctuating pressure originated from shaft revolution
실선 계측결과와의 비교를 위하여 모형시험에서 계측한 결 과 및 예측 결과 그리고 DnV의 통계학적 해석방법에 의한 예 측결과를 Fig. 16과 Fig. 17에 각각 나타내었다.
프로펠러 1차 조화성분(1xPBF)의 경우 모형시험 및 추정 변 동압력 결과가 실선에서 그 것과 대체로 일치하고 있음을 알 수 있다. DnV방법의 경우 비교적 큰 값을 보이고 있으나 고 스큐 프로펠러 적용에 의한 변동압력의 감소를 고려했을 때 비교적 유사한 값을 얻은 것으로 판단되므로, 초기진동 해석 시 진동제어에 있어 유용한 자료가 될 것으로 판단된다. 프로 펠러 고차항의 추정 값 중 프로펠러 2차 조화성분(2xPBF)의 경우 비교적 유사한 값을 예측한 것으로 판단되나 모형시험에
서 얻은 고차항의 변동압력 값은 실선의 그 것과 큰 괴리를 보이고 있어, 실선의 변동압력 추정에는 무리가 있는 것으로 나타났다.
Fig. 16 Comparative diagram for amplitude of propeller-induced fluctuating pressure under
ballast condition
Fig. 17 Comparative diagram for amplitude of propeller-induced fluctuating pressure under
loaded condition
Fig. 18 Measured fluctuating pressures <CS> vs
<CP> under ballast condition
Fig. 19 Measured fluctuating pressures <CS> vs
<CP> under loaded condition
Fig. 20 Distribution of 1xPBF at NCR(111rpm) under loaded condition
실선 계측위치 중 변동압력의 분포는 C점을 기준으로 좌현 보다 우현쪽의 분포가 상대적으로 크며, 선미보다 선수 쪽으 로 큰 변동압력의 분포를 가짐을 알 수 있다. 변동압력에 대 한 분포는 Fig. 18 ~ Fig. 20에 도시하였다.
4.2 실선 진동 계측
선체 진동계측은 변동압력계측과 동시에 수행하였으며, 계 측위치는 Fig. 21에 나타내었다.
재화상태와 프로펠러 회전수에 따른 진동응답의 결과 중 조타실(Wheel house) 종방향 및 선미 Transom 수직방향에 대해 Fig. 22 ~ 26에 대표적으로 나타내었다.
Fig. 21 Measuring locations for hull girder vibration
Vibration amplitude at Nav.Bri.Deck(Longi. Dir)
0.0 1.0 2.0 3.0 4.0 5.0 6.0 7.0 8.0 9.0
55 65 75 85 95 105 115
M/E RPM
Vel.[mm/s, peak]
2nd order 3rd order 4th order 5th order 6th order
NCR (111rpm, shaft power)
Fig. 22 Measured vibration amplitude at wheel house under ballast condition
Vibration amplitude at Stern(Vert. Dir.)
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0
55 65 75 85 95 105 115
M/E RPM
Vel.[mm/s, peak]
2nd order 3rd order 4th order 5th order 6th order
NCR (111rpm, shaft power)
Fig. 23 Measured vibration amplitude at transom
under ballast condition
Vibration amplitude at Nav.Bri.Deck(Longi. Dir)
0.0 0.5 1.0 1.5 2.0 2.5
55 65 75 85 95 105 115
M/E RPM
Vel.[mm/s, peak]
2nd order 3rd order 4th order 5th order 6th order
NCR (111rpm, shaft power)
Fig. 24 Measured vibration amplitude at wheel house under loaded condition
Vibration amplitude at Stern(Vert. Dir.)
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0
55 65 75 85 95 105 115
M/E RPM
Vel.[mm/s, peak]
2nd order 3rd order 4th order 5th order 6th order
NCR (111rpm, shaft power)
Fig. 25 Measured vibration amplitude at transom under loaded condition
Vibration amplitude due to 1xPBF
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0
55 65 75 85 95 105 115
RPM
Vel.[mm/s, peak]
Nav.(Longi. Dir) Stern.(Ver. Dir)
NCR (111rpm, shaft power)
Fig. 26 Measured vibration amplitude at wheel house vs transom under loaded condition
계측결과 프로펠러 1차 조화성분(1xPBF)에 의한 과도응답 은 두 조건 모두 나타나지 않았으며, 응답치 또한 1mm/s 내 외로 진동해석에서 얻은 추정 응답치 보다 상당히 낮은 값을 보였다. 또한 Fig. 25에서 알 수 있듯이 선미 Transom에서 응
답치가 3.7 mm/s로 나타나 상대적으로 큰 값을 보였으나, 선 루에서는 상당히 작은값을 보여주고 있으므로, 선미와 선루의 연성진동 양상은 발생하지 않는 것으로 판단된다. 이는 선미 및 기관실 보강으로 인한 진동감소 효과가 예상치 보다 크고 선체 작용력이 추정치보다 작게 작용한 것으로 보인다. 이것 은 변동압력의 선체 작용력으로의 변환에 있어 보수적인 고려 가 주 원인인 것으로 판단된다. 또한, 프로펠러 고차성분에 대 한 선체 응답값은 양호하였다.
주기관에 의한 진동의 경우 주기관에 기계식 역기진기가 설치되었음에도 불구하고 Fig. 22에서 보여주듯 밸러스트 상 태에서 주기관의 2차 수직 불평형 모멘트에 기인된 기진력 성 분 응답치가 101 rpm(3.4Hz)에서 7.7mm/s로 계측되었고, 또 한, 선체 3~4절 수직 모드에 기인된 진동특성이 뚜렷하게 관 측되었다. 이는 역기진기의 Counter mass가 모멘트를 완전히 상쇄하지 못해서 생기는 현상으로 판단된다. 그러나, 재화상 태에서의 응답치는 거주구에서 최대 1.4 mm/s, 선미 Transom에서 0.7 mm/s 이 하로 매우 작았으며 계측 전체에 걸쳐 뚜렷한 특성은 나타나지 않았다. 기타 주기관의 응답치 는 아주 양호하게 나타났다.
밸러스트 및 재화상태에서 국부 진동계측도 수행하였다.
설계단계에서 국부진동을 제어하기 위한 공진회피설계가 이 미 수행되었으며, 따라서 진동 계측결과 거주구, 선미, 기관실 등 모두 양호한 값을 나타내었다.
5. 결 론
본 사례연구에서는 선박진동의 주요 원인으로 작용하는 주 기관 및 프로펠러 변동압력에 의한 진동응답의 특성에 대하여 문제시된 기진력 성분에 대한 진동제어 대책을 마련하고 시운 전 밸러스트 조건 및 인도 후 재화상태에서 실선계측을 수행 하여 이를 검증하였다.
5.1 선체 변동압력 계측
실선 변동압력 계측을 위해 Bottom plug를 선체외판에 시 공한 후 압력센서를 설치하여 선체 내부에서 변동압력을 직접 계측할 수 있도록 하였다. 계측결과 날개주파수의 1차 성분 (1xPBF)뿐만 아니라 고차 조화성분에도 크게 지배되는 것으로 나타났으며, 프로펠러 회전수의 증가에 따라 변동압력크기가 전반적으로 증가함을 알 수 있었다. 변동압력의 증가량은 본 선의 경우 프로펠러 회전수 5승에 비례하는 경향을 보였다.
실선 변동압력 계측 결과로부터 모형시험에서 계측한 프로
펠러 1차 성분(1xPBF)값이 비교적 정확히 예측됨을 알 수 있 었다. 또한 통계학적 방법에 의한 DnV 경험식도 고스큐 프로 펠러(highly-skewed propeller) 적용에 의한 변동압력 감소를 고려한다면 계측결과와 유사한 경향을 보이는 바, 설계초기단 계에서의 진동제어에 있어 아주 유용한 자료가 될 것으로 판 단된다. 그러나, 고차항의 변동압력 들은 모형시험에서 신뢰 할 수 없을 만큼 작은 값이 계측되어 실선 변동압력의 직접 추정에는 무리가 있어 보인다. 이러한 괴리는 추후 실험과 이 론을 포함한 포괄적인 연구를 통한 신뢰성 해석으로의 접근이 필요하다고 사료된다.
5.2 선체 진동 계측
실선 진동계측결과 프로펠러 변동압력(1xPBF)에 대한 응답 치는 설계단계에서 예측한 그것보다 상당히 낮게 계측되었다.
이 원인은 선미 및 기관실의 보강으로 인한 진동감소 효과가 예상보다 크고 변동압력으로 인한 선체 작용력이 추정치 보다 작은 것에서 기인된 것으로 판단된다. 또한, 프로펠러 고차 성 분들의 경우 아주 양호한 진동 응답치를 나타내었다.
그리고, 주기관 기진력에 의한 진동계측 결과 기계식 역기 진기(Mechanical balancer)가 주기관 선수미에 설치 되었음 에도 불구하고 2차 수직 불평형 모멘트에 기인된 기진력 성분 응답치가 크게 계측되었다. 이는 역기진기의 Counter mass가 2차 수직 불평형 모멘트를 완전히 상쇄하지 못해 생기는 현상 으로 판단된다. 그러나, 재화상태에서의 계측 전 영역에 걸쳐
뚜렷한 응답특성은 나타나지 않았으며 응답치 또한 아주 작은 값을 나타내었다.
참 고 문 헌
· 송인행, 서종수, 백광준, 정재권, "실선에서의 프로펠러 변 동압력 성능검증" 대한조선학 특별 논문집, pp. 44-50, 2005. 6.
· 박진화, 배종국, 안유원, "LNG 운반선 프로펠러 변동압력 에 대한 실험적 고찰”대한조선학회 춘계발표회 , 2003.
· 주원호, 박진화, 배종국, 김종수, "추력변동과 프로펠러 변 동압력 계측을 통한 선박진동의 기진력 특성연구”대한조 선학회 춘계발표회 , 2006.
·DnV, Vibration Control in Ships, 1985.
서 해 수
■ 1972년생
■ 1999년 울산대학교 조선공학과 공학석사
■ 현 재 : 현대미포조선 차장
■ 관심분야 : 구조해석, 선박진동
■ 연 락 처 : 052-250-3763
■ E - mail : [email protected]
대한조선학회논문집(한국연구재단 등재학술지)에 대한조선학회논문집(한국연구재단 등재학술지)에 회원 여러분들의 많은 논문 투고를 부탁드립니다.
회원 여러분들의 많은 논문 투고를 부탁드립니다.