Journal of the Korean Society of Surveying, Geodesy, Photogrammetry and Cartography Vol. 33, No. 5, 443-451, 2015
http://dx.doi.org/10.7848/ksgpc.2015.33.5.443
ICP DEM 매칭방법의 정확도 개선
Accuracy Improvement of the ICP DEM Matching
이효성1)
Lee, Hyoseong
Abstract
In photogrammetry, GCPs (Ground Control Points) have traditionally been used to determine EOPs (Exterior Orientation Parameters) and to produce DEM (Digital Elevation Model). The existing DEM can be used as GCPs, where the observer’s approach is a difficult area, because it is very restrictive to survey in the field. For this, DEM matching should be performed. This study proposed the fusion method using ICP (Iterative Closest Point) and RT (proposed method by Rosenholm and Torlegard, 1988) in order to improve accuracy of the DEM matching. The proposed method was compared to the ICP method to evaluate its usefulness. Pseudo reference DEM with resolution 10m, and modified DEM (random-numbers are added from 0 to 2 at height; scale is 0.9;
translation is 100 meters in 3-D axes; rotation is from 10° to 50° from the reference DEM) were used in the experiment. The results proposed accuracy was highest in the matching and absolute orientation. In the case of ICP, according to rotation of the modified DEM being increased, absolute orientation error is increased, while the proposed method generally showed consistent results without increasing the error. The proposed method would be applied to matching when the DEM is modified up to 30° rotation, compared to the reference DEM, based on the results of experiments. In addition when we use Drone, this method can be utilized to identify EOPs or detect 3-D surface deformation from the existing DEM of the inaccessible area.
Keywords : Exterior Orientation Parameters, DEM Matching, Iterative Closest Point Matching, Rosenholm and Torlegard Matching, Absolute Orientation
초 록
사진측량기법으로 외부표정요소 결정과 지형의 DEM 제작을 위해선 전통적으로 지상기준점을 이용하였다. 그 러나 접근이 곤란한 지역은 측량이 어렵기 때문에 기 확보된 DEM을 기준점 대용으로 활용할 수 있다. 이를 위해선 DEM 매칭을 수행해야만 한다. 본 연구에서는 DEM 매칭의 정확도 향상을 위해 ICP와 RT 매칭을 혼용하는 방법 을 제안하였다. 그리고 제안방법의 성능평가를 위해 ICP 방법과 비교하였다. 실험을 위해 기준 DEM과 기준 DEM 을 변형시킨 DEM(높이 값에 난수 0부터 2까지, 축척은 0.9, 이동은 3축 모두 100m, 회전은 3축 모두 10°부터 50° 까 지 변형)을 이용하였다. 그 결과, 제안방법의 매칭과 절대표정 정확도가 가장 우수하였다. ICP의 경우, 변형 DEM의 회전각이 증가함에 따라 절대표정 오차가 증가한 반면 제안방법은 대체적으로 그 오차가 증가하지 않고 일정한 결 과를 보였다. 실험결과를 토대로 변형 DEM이 기준 DEM에 비해 30° 까지 회전되었을 때는 제안방법이 적용 가능 할 것으로 판단한다. 또한 이 방법은 무인항공기로부터 접근 불가능 지역의 기 확보 DEM에 의한 외부표정요소 결 정 또는 3차원 표면변화를 파악할 때 활용 가능할 것이다.
핵심어 : 외부표정요소, DEM 매칭, ICP 매칭, RT 매칭, 절대표정
443 ISSN 1598-4850(Print) ISSN 2288-260X(Online) Original article
This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License (http://
creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Received 2015. 10. 12, Revised 2015. 10. 19, Accepted 2015. 10. 24
1) Member, Dept. of Civil Engineering, Sunchon National University (E-mail: [email protected])
444
1. 서 론
사진측량기법으로 외부표정요소 결정과 지형의 DEM 제작 을 위해선 전통적으로 지상기준점을 이용하였다. 그러나 접 근이 곤란하거나 불가능한 지역(화산지대, 극지대 등)은 지상 기준점 획득이 어렵다. 따라서 최근에는 기 확보된 DEM(이하 기준 DEM)을 기준점 대용으로 활용하는 연구가 늘고 있는 추세이다(Kim and Jeong, 2011; Oh and Jung, 2012). 이때 센 서의 초기 부정확한 외부표정요소(위치와 자세)로부터 제작 한 DEM을 기준 DEM으로 절대 표정하는 방법 즉, DEM 매칭 이 주로 이용되고 있다. 이 DEM 매칭 방법은 절대표정(Ebner and Strunz, 1988) 뿐만 아니라 동일 지역의 다시기 DEM을 비교 또는 변화를 분석하는데도 활용되고 있다(Karras and Petsa, 1993; Zhang et al., 2005; Lee et al., 2011).
DEM 매칭은 Rosenholm and Torlegard(1988)에 의해 개 발된 같은 평면위치의 높이차를 이용한 방법(이하 RT 매칭) 이후로 이를 응용한 다양한 방법들이 제시되었다. Zhang et
al.(2005)은 DEM 매칭 중 과대오차가 발생하는 지점의 참여를 제한하는 경중률 적용 방법을 제안하였다. Kim and Jeong(2011)은 기존 프레임(frame) 센서의 절대표정을 위한 RT 매칭에 기반하여 푸쉬부룸(pushbroom) 센서 절대표정방 법에 적용할 수 있게 개발하였다. Gruen and Akca(2005)는 근접사진측량으로 결정한 다양한 대상체의 DEM을 서로 접 합시키기 위해, 최소제곱법에 의한 3D 표면 매칭방법을 개발 하였다. 여기서, RT 매칭과 3D표면 매칭은 축척, 위치와 회전 변환계수의 초기 설정이 중요하므로 DEM 간 공간상의 차이 가 크면 매칭이 어렵다.
이외에도 영상매칭과 자동 기하보정에 널리 이용되는 SIFT(Scale-Invariant Feature Transform) 매칭(Lowe, 2004) 방법도 DEM 매칭에 응용할 수도 있다(Lee et al., 2010). SIFT 매칭은 기본적으로 영상 밝기 값의 특징점을 이용한 매칭이 기 때문에 매칭 후의 변환은 높이 차가 고려되지 않은 2차원 어핀(Affine)으로만 이루어진다. 따라서 매칭된 영상좌표를 3 차원좌표로 변환시킨 후 7개 변환계수(회전, 위치이동과 축 척)를 구해야 한다. 이 과정에서 두 DEM 간의 3축(X, Y, Z) 회전변화가 크면 매칭 후의 영상좌표를 3차원좌표로 변환하 는 과정에서 오류가 생기기 때문에 7개 변환계수 또한 부정 확한 결과 값이 계산되고, 이는 매칭이 어려워지는 결과를 초 래한다 . 따라서 이 방법을 변위가 심한 DEM 매칭에 활용하 는 것은 어렵다.
한편 ICP(Iterative Closest Point)는 두 점군 집합 사이의 임 의 점들 간 최소거리 조건으로 매칭 쌍을 찾은 다음 공분산 행
터 비젼 분야에서 3차원 표면매칭이나 이동 로봇의 실시간 위 치측정 등에 널리 이용되는 방법이다(Besl and McKay, 1992;
Joung, 2009). 그러나 이 방법은 일정 패턴의 밋밋한 형태를 가 진 지형이거나 일부분만 중복된 DEM에서는 상호간의 공분 산 계산이 힘들기 때문에 변환된 DEM은 왜곡이 발생할 수 있 다 . 또한 같은 점을 찾기 위한 반복계산 시간이 많이 걸린다는 단점이 있다(Gruen and Akca, 2005; Han, 2007). 그러나 항공 기와 위성 등으로 획득되는 지형 DEM은 대체적으로 기복이 클 뿐 아니라 최근 컴퓨터 하드웨어 기술발전과 ICP 속도개선 방법 개발로 인해 처리속도 또한 매우 빠르게 향상되고 있는 상황이므로 ICP를 이용한 지형 DEM 매칭에는 큰 문제가 없 다고 본다. 물론 ICP도 두 DEM 간 축척과 회전변화가 크면 매 칭의 정확도가 떨어질 수 있다. 본 연구에서는 DEM 매칭의 정 확도 향상을 위해 ICP와 RT 매칭을 혼용하는 방법을 제안하 였다 . 특히 RT 매칭에서 7개 변환계수를 결정할 때 계산에 참 여하는 지점선정 방법을 제시하였으며, 지점선정 하지 않았을 때의 결과와도 비교·제시하였다.
2. ICP와 RT 방법에 의한 DEM 매칭
ICP 방법은 초기 입력 값으로 두 DEM간의 변환계수를 자 동 (또는 수동)으로 생성하고 오차행렬을 최소화하는 방향으 로 , 변환계수를 반복적으로 갱신한 후, 오차변화량과 같은 종 료기준을 만족할 때 연산을 종료한다. ICP 방법 중 자주 사 용되는 점대점(point-to-point) 4원수 변환방법은 다음과 같 다 (Han, 2007).
Step 1 : 두 DEM 간 초기 변환계수로 두 DEM에서 임의 점
간 거리(
⋯
≤
)를 계산한다(Eq. (1)).
⋯
≤
(1)
where, X
i1, Y
i1, Z
i1are arbitrary position of first DEM. X
i2,
Yi2, Z
i2are arbitrary position of second DEM.
Step 2 : Step 1로부터 DEM 1의 한 점(i)과 가장 가까운 DEM 2의 한 점(i)을 선정하고, 이렇게 찾은 여러 매칭 쌍들을 이용하여 공분산 행렬을 계산한다.
Step 3 : 공분산 행렬을 이용하여 4원수 행렬을 계산하고, 이
로부터 최대 고유치(eigenvalue)를 구한 다음 변환
계수 행렬을 재계산한다(초기 변환계수 업데이트).
Accuracy Improvement of the ICP DEM Matching
445 Step 4 : 변환계수를 이용하여 두 번째 DEM을 첫 번째
DEM과 일치시키고, Step 1부터 반복한다. DEM간 오차행렬이 최소가 될 때(또는 변환계수의 차이가 임계치 이하일 때) 연산을 종료시킨다.
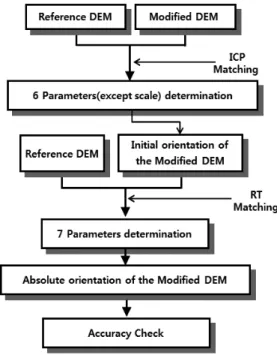
본 연구는 ICP 매칭으로 결정된 변환계수(축척 제외)를 이 용하여 변형 DEM을 보정하고, 이로부터 RT 매칭을 다시 수 행하여 축척이 추가된 변환 계수를 결정하여 정확도가 개선 된 DEM을 제시하였다. 본 연구의 흐름도는 Fig. 1에 제시하였 으며 , 그 구체적인 순서는 다음과 같다.
먼저 기준 DEM과 변형 DEM 간의 축척을 포함한 3차원 변환 계수를 구하기 위한 관계식은 Eq. (2)와 같이 정리할 수 있다 .
⋯
≤
(2)
where X
R, Y
Rand Z
Rare coordinates of the reference DEM;
XT
, Y
Tand Z
Tare the coordinates of the modified DEM; ∆X,
∆Y, ∆Z, S and R are translations, scale factor, rotation matrix
between the two DEMs, respectively.
다음으로 , ICP 매칭을 이용하여 기준 DEM과 변형 DEM 간 회전과 위치 이동량을 구한다. 구한 변환계수를 이용하여 변형 DEM의 좌표를 Eq. (3)에서 보는바와 같이 기준 DEM의 좌표에 가깝게 수정(또는 표정)한다.
⋯
≤
(3)
where X
R1, Y
R1and Z
R1are coordinates of the firstly approximated on the reference DEM by the ICP matching;
X1
, Y
1and Z
1are the coordinates of the modified DEM; ∆X
1,
∆Y1
and ∆Z
1, R
1are translations, rotation matrix between the reference DEM and the firstly reformed DEM by the ICP matching, respectively.
마지막으로 , RT 매칭을 이용하여 기준 DEM과 앞에서 수 정된 DEM 간 축척, 회전, 위치 이동량을 최종 결정하고, Eq.
(4)을 이용하여 앞에서 수정한 DEM을 기준 DEM에 보다 가 깝게 수정시킨다.
⋯
≤
(4)
where X
R2, Y
R2and Z
R2are coordinates of the secondly approximated on the reference DEM by the RT matching;
∆X2
, ∆Y
2, ∆Z
2, S and R
2are translations, scale factor, rotation matrix between the reference DEM and the secondly reformed DEM by the RT matching, respectively.
RT 매칭은 기본적으로 두 DEM 간 동일 평면위치에서 높 이 차를 이용하는 방법이므로 두 DEM의 품질이 우수하다는 가정 하에 임의 지점의 높이차이가 주변과 차이가 없어야 하 는 것이 중요하다. 따라서 RT 매칭을 적용하기 전에 계수 계산 에 참여하는 지점을 다음과 같은 순서로 설정하였다.
첫 번째, 우선 두 DEM에서 평면위치가 같은 지점을 찾고 (해상도가 10m이면 동일점을 이 범위내로 정한다), 그 지점 의 높이차(d
1…d
8)를 구한다. 높이차를 구할 때 과대오차 지 점의 참여를 제한하기 위해, Fig. 2와 같이 임의 한 점의 높이 차 (d
Zi)가 주변 8점의 높이차 평균값(
⋯
≤
)의 절대치와 같거나 적은 지점만(
⋯
≤
) 계수 계산에 참여 토록 설정한다.
Fig. 1. Flow chart for the proposed DEM matching
Journal of the Korean Society of Surveying, Geodesy, Photogrammetry and Cartography, Vol. 33, No. 5, 443-451, 2015
446
⋯
≤
(5)
3. 적용실험과 결과분석
실험에 사용된 자료는 기존 연구(Lee et al., 2011)에서 제작 한 DEM을 활용하였다. 이 DEM은 순천만 주변을 UltraCam 디지털 카메라로 2010년 05월에 연속·중복 촬영한 스테레오 항공사진에 의해 제작되어진 것이다. 본 연구에서는 실험을 위해 DEM의 해상도를 10m로 줄였으며, 이를 가상의 기준 DEM으로 사용하였다. 또한 기준 DEM의 높이에 0부터 2m 사이의 난수를 발생시키고, 3축(X, Y, Z)위치를 100m씩 더 하였으며, 축척도 0.90으로 변형시킨 DEM을 제작하였다. 실 험은 앞에서 변형한 DEM으로부터 10°부터 50°까지 회전 시 두 번째, Eq. (4)에서 7개 계수 계산을 위한 최소제곱법 적
용에서 경중률을 고려할 때 Zhang et al.(2005)과 Gruen and Akca(2005)가 제안한 방법을 적용하였다. 이 방법은 앞 Step 1에서 구한 d
Zm과 d
Zi의 차이(∆d
Z=d
Zm-d
Zi)가 전체 ∆d
Z에 대한 중앙값보다 적으면 경중률은 1, 그렇지 않으면 0의 값을 부여 하는 것이다.
이렇게 구한 Eq. (4)의 7개 계수는 기준 DEM과 변형 DEM 간의 절대표정계수가 아니므로 앞 Eq. (3)에서 구한 변환계수 까지 고려해주어야 한다. 따라서 Eq. (3)을 Eq. (4)에 대입하 여 정리하면 Eq. (5)과 같이 나타낼 수 있다. Eq. (5)를 이용 하여 변형 DEM의 절대표정계수를 구할 수 있으며 이로부터 영상의 초기 외부표정요소도 보정할 수 있다. Eq. (5)으로부 터 원래 구하고자 하는 Eq. (2)의 변환계수는 S(축척)=S, R(회 전행렬 )=R
2R1, [∆X ∆Y ∆Z]
T(위치 이동량)=SR
2[∆X
1∆Y1∆Z1]
T
+[∆X
2∆Y2∆Z2]
T으로 구할 수 있다.
Fig. 2. Height difference between the same location on both DEMs
Fig. 3. Suncheon Bay image from the UltraCam and area to take DEM(a quadrangle), original DEM,
pseudo reference DEM(bottom) with resolution 10m and modified DEM(top)
Accuracy Improvement of the ICP DEM Matching
447 킨 후, ICP 매칭만 적용한 경우(Case A), ICP와 RT매칭을 같
이 적용하고 앞에서 언급한
⋯
≤
지점의 참여를 고려 하진 않은 경우(Case B)와 고려한 경우(Case C)로 나누어 수 행하였다 .
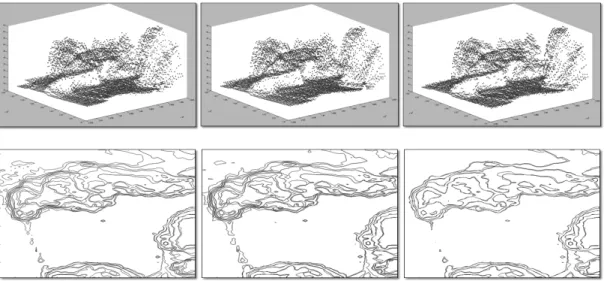
Fig. 3은 좌측부터 순천만 스트립 영상 중 대상지역 영상, 이로부터 제작한 원래 DEM, 본 실험에 사용된 해상도 10m의 기준 DEM(아래)과 3축에서 10도 회전된 변형 DEM(위)을 나 타낸 것이다. Fig. 4는 변형된 DEM을 회전시킨 후 각각의 경 우별로 매칭시킨 다음 수정된 DEM 결과를 기준 DEM과 함
께 점군 형태와 등고선 형태로 겹쳐서 나타낸 것이다.
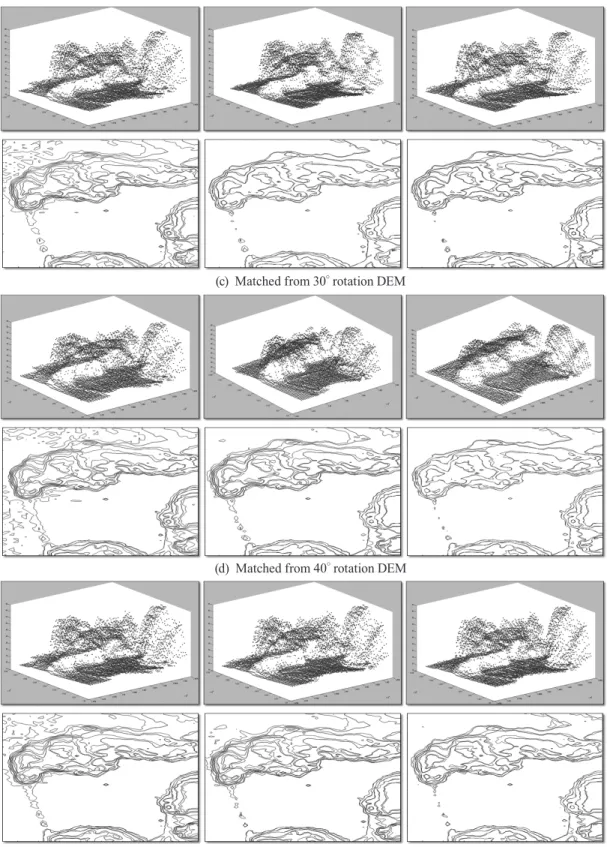
Fig. 4에서 보는바와 같이, Case A, Case B 결과에서는 수 정 DEM과 기준 DEM의 겹치는 부분에서 차이가 있음을 보 여주며 , 등고선 또한 겹치는 지점의 차이가 크게 나타났다. 반 면 Case C의 결과는 전반적으로 두 점군자료와 등고선이 잘 겹쳐져 나타났다. 회전이 30°인 DEM의 경우는 Case A 결과 에 비해 Case B, Case C의 겹치는 정도가 비슷한 결과를 보였 다 . 한편 변형된 DEM의 3축 회전각이 크면 클수록 매칭에 의 한 점군자료와 등고선의 겹치는 정도가 떨어짐을 볼 수 있다.
(a) Matched from 10° rotation DEM
(b) Matched from 20° rotation DEM
448
(d) Matched from 40° rotation DEM
(e) Matched from 50° rotation DEM
Fig. 4. Point-clouds(top) and contours(bottom) for reformed DEM(magenta) from the three cases
(c) Matched from 30° rotation DEM
Accuracy Improvement of the ICP DEM Matching
449 Reformed DEM
3-axes
rotation 10° 20° 30° 40° 50°
Case A B C A B C A B C A B C A B C
RMSE(m) 2.1 1.6 0.7 2.1 1.2 1.1 2.21 0.6 0.9 2.4 2.0 0.8 2.3 1.9 1.3
Correlation 0.99 0.99 1.00 0.99 1.00 1.00 0.98 1.00 1.00 0.98 0.99 1.00 0.98 0.99 1.00 Table 1. Height errors and similarity between the reformed DEM and reference DEM after
three cases matching according to rotation angle of the modified DEM
Reformed DEM
3-axes rotation 10° 20° 30° 40° 50°
Case A B C A B C A B C A B C A B C
E r o r r s
dX(m) 4.4 0.5 5.1 5.3 3.7 4.6 1.7 7.7 8.5 4.0 0.9 10.0 8.0 11.7 4.8
dY(m) 12.7 6.0 7.1 30.8 24.0 2.7 49.6 12.1 5.4 79.6 25.6 15.9 90.9 24.4 23.8 dZ(m) 4.2 1.9 0.4 11.2 10.3 0.3 21.5 0.4 2.1 32.0 17.3 2.6 38.7 18.9 14.3 Omega(°) 2.2 0.4 0.1 6.6 1.5 0.3 11.5 0.3 0.2 14.7 8.4 0.7 15.2 2.9 0.3
Phi(°) 1.8 1.0 0.1 9.2 1.7 0.0 22.8 0.1 0.1 37.9 6.9 0.6 34.1 3.5 0.1
Kappa(°) 1.1 5.7 0.3 4.0 9.6 0.3 7.8 0.4 0.0 8.6 12.5 0.9 9.7 4.2 0.2
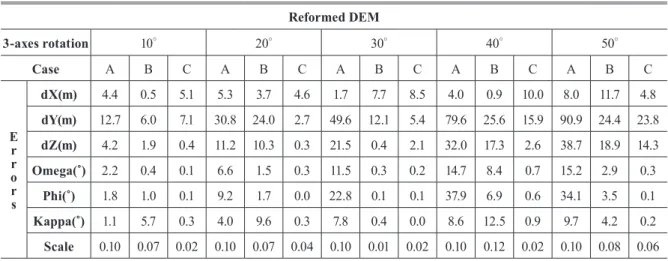
Scale 0.10 0.07 0.02 0.10 0.07 0.04 0.10 0.01 0.02 0.10 0.12 0.02 0.10 0.08 0.06 Table 2. Errors of the computed parameters after three cases matching according to rotation angle of the modified DEM
Fig. 5. Translation-parameters errors(left) and rotation-parameters errors(right) in Table 2
Table 1은 각각의 Case 별로 매칭 후 수정된 DEM과 기준 DEM 간의 높이 오차와 유사도를, Table 2는 Eq. (4)로부터 계 산된 절대 표정계수와 앞에서 제시한 변형 DEM의 변환계수 간 차이를 각각의 Case별로 나타낸 것이다. Fig. 5는 Table 2에 서 제시한 이동과 회전각에 대한 오차를 별도로 분리해서 그
래프로 표현한 것이다.
Table 1에서, 각 경우별 높이 값 오차와 유사도는 전반적으
로 Case C의 결과가 가장 좋게 나타났으며, 회전이 30°인 경우
만 Case B의 결과가 Case C의 결과보다 좋았다. 그리고 회전
각이 50° 인 결과오차가 가장 크게 나타났으며, 본문에는 언급
450
문에 RT 매칭 또한 적용할 수 없었다. 이는 본 실험에 사용된 데이터의 특성이 ICP 기법에서 초기변환계수를 자동으로 설 정할 때 50° 이상 차이가 날 경우에는 초기 설정 값으로 반복 계산 하더라도 수렴되지 않기 때문인 것으로 판단된다.
Table 2, Fig. 5에서 보는바와 같이, 7개 계수에 대한 절대 표정 계수 차이 또한 전체적으로 Case C의 결과오차가 가장 적었다 . 여기서, 변형 DEM의 회전각이 클수록 모든 방법들의 이동계수 오차도 증가하는 결과를 보였다. 회전요소 오차는 Case A, B만 오차가 증가한 반면 Case C는 그 영향을 받지 않 고 모두 1° 이내의 오차를 보였다. 그리고 Case C 결과에서 30°
회전각까지는 위치오차가 해상도 이내로 들어오나 그 이상에 서는 오차가 증가하는 것을 보였다.
결과적으로 본 연구에서 사용한 자료를 토대로 제안한 ICP 와 RT를 혼용한 DEM 매칭 방법이 기존의 ICP 매칭 방법보 다 정확한 매칭이 이루어진다는 것을 제시할 수 있었으며 계 수 계산에 있어서 과대오차 발생 지점의 참여를 제한한 것이 매칭의 정확도 향상에 중요한 역할을 차지했다고 볼 수 있다.
4. 결 론
본 연구에서는 DEM 매칭의 정확도 향상을 위해 ICP와 RT 매칭을 혼용하는 방법을 제안하였다. 제안방법의 성능평가를 위해 ICP 방법과 비교하였다. 실험은 기준 DEM과 기준 DEM 을 변형시킨 DEM을 이용하였으며, 변형 DEM을 10°부터 50°
까지 회전시켜 사용하였다.
그 결과, 제안방법에 과대오차 발생 지점의 참여를 제한한 경우의 매칭결과와 절대표정 계수 계산 정확도가 가장 우수 하였다. ICP의 경우, 변형 DEM의 회전각이 증가함에 따라 절 대표정 계수오차가 증가한 반면 제안방법은 대체적으로 그 오차가 증가하지 않고 일정한 결과를 보였다. 실험을 토대로 변형 DEM이 기준 DEM에 비해 30° 까지 회전되었을 때는 위 치이동 계수오차가 해상도 범위내로 들어왔으며, 회전요소 오 차 또한 0.3° 이내의 결과를 보였다.
그러나 50° 이상 회전된 DEM의 경우에는 ICP 매칭에 의 한 초기 계수 계산이 어렵기 때문에 RT 매칭도 불가능하였 다. 따라서 30° 회전범위까지는 제안방법이 적용 가능할 것으 로 판단한다. 또한 이 방법은 무인항공기로부터 기준점 획득 이 힘든 접근 불가능 지역의 기 확보 DEM에 의한 외부표정 요소 결정 또는 3차원 표면변화를 파악할 때 활용 가능할 것 으로 판단한다.
감사의 글
이 논문은 2015년도 한국연구재단의 기초연구사업 지원 (NRF-2015R1D1A3A01020842)을 받아 수행된 것임
References
Besl, P. and Mckay, N. (1992), A method for registration of 3-D shapes, IEEE Transactions on Pattern Analysis and
Machine Intelligence, Vol. 14, No. 2, pp. 239-256.Ebner, H. and Strunz, G. (1988), Combined point determination using digital terrain models as control information, International Archives of Photogrammetry
and Remote Sensing, Vol. 27, Part B11/3, pp. 578-587.Gruen, A. and Akca, D. (2005), Least squares 3D surface and curve matching, ISPRS Journal of Photogrammetry and
Remote Sensing, Vol. 59, No. 3, pp. 151-174.Han, D. (2007), Automatic Adjustment of Airborne LiDAR
Strip Data Using the ICP and Extrema Detection Algorithm, Ph.D. dissertation, Seoul National University,Seoul, Korea, 107p. (in Korean with English abstract) Joung, J. (2009), 3D Environment Reconstruction Using
Modified ICP Algorithm by Fusion of a Camera and a 3D Laser Range Finder, Master’s thesis, Korea Advanced