Development for Verification Tool Guaranteeing Reliability
of Rail Signal Control Protocol
프 로 토 콜 검 정 을 위 한 Modal Mu-Calculus 표 현 식
1. Safety Check 식 (Deadlock 및 Livelock) :
νZ. (µY.A ∨( <-> tt ∧ [-]Y)) ∧ [-]Z 단, A={S
0}
2. State Reachability Check 식 :νZ. (µY.A ∨( <action
2> tt ∧ [action
1]Y)) ∧ [-]Z 단, A={state}
3. Action Reachability Check 식 :
νZ. [action
1](µY. <action
3> tt ∧ [action
2]Y) ∧ [-]Z
프 로 토 콜 검 정 을 위 한 Modal Mu-Calculus 표 현 식1. Safety Check 식 (Deadlock 및 Livelock) :
νZ. (µY.A ∨( <-> tt ∧ [-]Y)) ∧ [-]Z 단, A={S
0}
2. State Reachability Check 식 :νZ. (µY.A ∨( <action
2> tt ∧ [action
1]Y)) ∧ [-]Z 단, A={state}
3. Action Reachability Check 식 :
νZ. [action
1](µY. <action
3> tt ∧ [action
2]Y) ∧ [-]Z
Modal M u-calculus
논 리 식
Max block, Min block
생 성
Edge-labeled directed Graph
생성
Bit-vector, Counter, M array 생 성
초 기 화 및 갱신 알고리
즘 적 용
CTC SCADA
CTC SCADA
그림 4.
S
0S
2S
4S
3S
5a
5S
1a
8a
4a
3a
2a
1a
6a
7S
1: Ack_await S
3: Resp_await S
5: Ack_await S
0: Idle
S
2: T
1=P
1S
4: T
2=P
2a
2: ack a
4: train_state_msg a
6: operate_T
2_timer a
8: ack
a
1: TCP_con_req a
3: operate_T
1_timer a
5: ack
a
7: SCADA_state_msg
Protocol Verification Tool
InitDeadlock &
Livelock
InitReachability State
InitReachability
Action Liveness Check Determinist Check
Initialize
Solve
Deadlock &
Livelock check
Reachability State check C.initialize
X.initialize B.graph
Reachability Action check
LTS file
Choice = ?
그림 6.
BitArray(X)
시 작
i<nbState? No
종 료 if(X[i][5]==0)?
set+=i Yes Yes
i++ No return set
그림 7. Livelock Check
Yes BitArray(X)
시작
i<nbState? No
종료 if( C[i][3]==1 &&
C[i][4]==1)?
return set Yes
i++
return set No
B i t A r r a y ( X )
시 작
i < n b S t a t e ? N o
종 료 i f ( X [ i ] [ 2 ] = = 1 & &
X [ i ] [ 4 ] = = 1 & &
X [ i ] [ 5 ] = = 1 ) ?
s e t + = i Y e s Y e s i + +
r e t u r n s e t N o
i f ( C [ i ] [ 3 ] = = 1 ) ?
s e t + = i Y e s N o
그림 9. Reachability Action Check부모듈의 procedure
BitArray(X)
시 작
i<nbState? N o
종 료 if(X[i][3]==1)?
Yes
i++ N o return set
set2+=i Yes
j<nbState?
if(C[j][1]==1 &&
!(s2->belong(j)))?
Yes
S e t 1 + = j Yes
j + +
N o
N o
그림 10. Liveness
시작
s′==s
0? No
Yes s=s′
LTS(L) choice User
s=s
0Display allaction(begin=s, end=s′) s— allactionàs′
종료
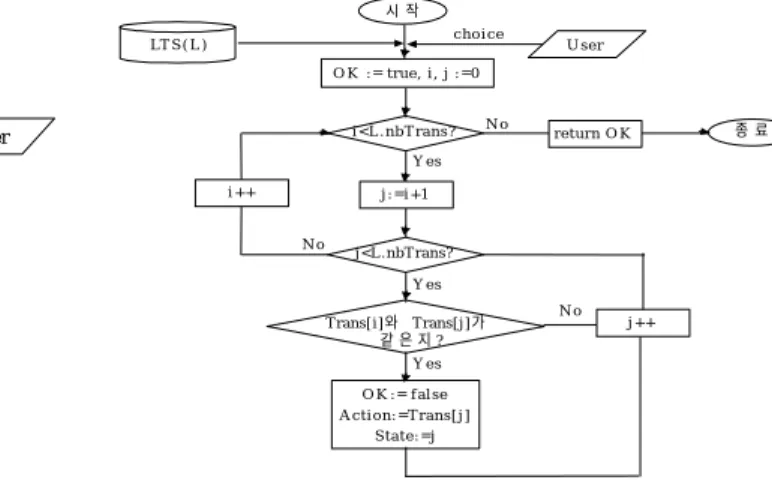
그림 11. Determinist
시 작
LT S ( L )
O K : = t r u e , i , j : = 0
i < L . n b T r a n s ?
j < L . n b T r a n s ?
T r a n s [ i ] 와 T r a n s [ j ] 가 같 은 지 ?
j : = i + 1
j + +
r e t u r n O K 종 료
N o
N o
Y e s
Y e s
Y e s
N o U s e r c h o i c e
O K : = f a l s e A c t i o n : = T r a n s [ j ]
S t a t e : = j i + +
B
1≡min{X
1= X
2∨ X
3X
2= A X
3= X
4∧ X
5X
4= [-]X
1X
5= <->X
6X
6= tt}
B
2≡max{X
7= X
1∧ X
8X
8= [-]X
7}
X
1X
8X
2X
3X
4X
5X
6X
7[-]
∧ ∧
∧ [-] ∧
<->
∨ ∨
it-vector
( 14) .
X X
1X
2X
3X
4X
5X
6X
7X
8C X
3X
4S
01 1 1 1 1 1 1 1 S
00 0
S1 1 0 1 1 1 1 1 1 S
10 0
S2 1 0 1 1 1 1 1 1 S
20 0
S3 1 0 1 1 1 1 1 1 S
30 0
S4 1 0 1 1 1 1 1 1 S
40 0
S5 1 0 1 1 1 1 1 1 S
50 0
M[1]=< >
M[2]=< >
X X
1X
2X
3X
4X
5X
6X
7X
8C X
3X
4S
00 1 0 0 0 1 1 1 S
02 3
S
10 0 0 0 0 1 1 1 S
12 1
S
20 0 0 0 0 1 1 1 S
22 1
S
30 0 0 0 0 1 1 1 S
32 1
S
30 0 0 0 0 1 1 1 S
42 1
S
50 0 0 0 0 1 1 1 S
52 1
M[1]=<<S
0,X
2>, <S
0,X
6>, <S
1,X
6>, <S
2,X
6>, <S
3,X
6>, <S
4,X
6>, <S
5,X
6>>
M[2]=< >
입력 출력
입력 출력
type 2 LTS
Modal Mu-Calculus .
,
.
, (CTC) SCADA
type 2 .
.
(discrete time)
.
![그림 6. BitArray(X) 시 작 i<nbState? No 종 료 if(X[i][5]==0)? set+=i Yes Yes](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5394613.415849/4.892.137.807.121.609/그림-bitarray-시-작-nbstate-no-yes-yes.webp)