DOI https://doi.org/10.9725/kts.2020.36.5.279
MW급 대용량 유도전동기 축계의 모드실험 기반 회전체 동역학 해석모델 수립 및 위험속도 예측
박지수1ㆍ최재학2ㆍ김동준2ㆍ심규호3†
1
서울과학기술대학교 기계시스템디자인공학과 연구원
2
한국전기연구원 전기응용연구본부 연구원
3
서울과학기술대학교 기계시스템디자인공학과 부교수
Rotordynamic Model Development and Critical Speed Estimation Through Modal Testing for the Rotor-Bearing System
of a MW Class Large-Capacity Induction Motor
Jisu Park
1, Jae-Hak Choi
2, Dong-Jun Kim
2and Kyuho Sim
3†1
Researcher, Department of Mechanical System Design Engineering, Seoul National University of Science and Technology
2
Researcher, Application Research Division, Korea Electrotechnology Research Institute
3
Associate Professor, Department of Mechanical System Design Engineering, Seoul National University of Science and Technology
(Received September 16, 2020 ; Revised October 28, 2020 ; Accepted October 29, 2020)
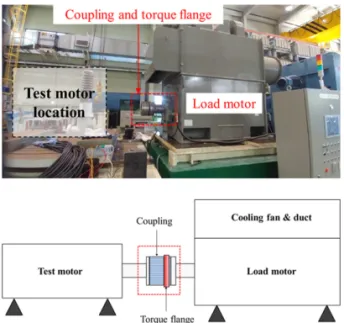
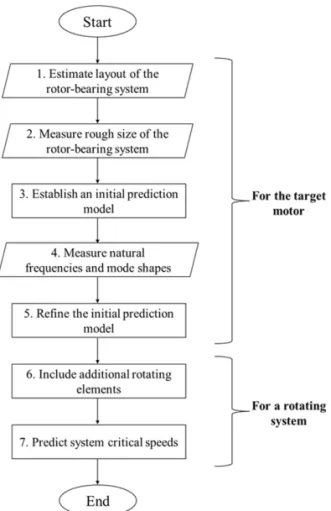
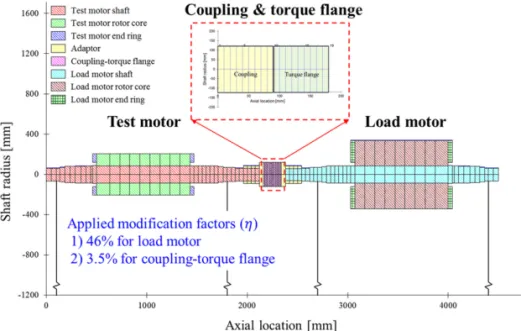
Abstract − In this paper, a method is proposed for establishing an approximate prediction model of rotor- dynamics through modal testing. In particular, the proposed method is applicable to systems that cannot be estab- lished according to conventional methods owing to the absence of information regarding the dimensions and material of the rotor–bearing system. The proposed method is demonstrated by employing a motor dynamometer driven by a 1 MW class induction motor without dimension and material information. The proposed method comprises a total of seven steps, wherein an initial model is established by incorporating approximate dimensions and material information, and the model is improved on the basis of the natural frequency characteristics of the system. During model improvement, the modification factor is introduced for adjusting the elastic modulus and shear modulus of the system. Analysis of critical speed and imbalance response indicates that the separation mar- gin is 67% and the maximum vibration amplitude is less than the amplitude limit of 0.032 mm under the API 611 standard, which means that the motor dynamometer can stably operate at a rated speed of 1800 rpm. Hence, the obtained results validate the feasibility of the proposed method. Furthermore, for broad usage, it is necessary to accordingly apply and validate the proposed method for various rotor–bearing systems.
Keywords − large-capacity induction motor(대용량 유도전동기), rotordynamics(회전체동역학), critical speed(위험속도)
1. 서 론
1.1. 연구의 배경
회전체의 질량중심은 형상 부정확성과 질량 불균형으
†