Copyright
Ⓒ2011 KSAE 1225-6382/2011/112-02 Transactions of KSAE, Vol. 19, No. 4, pp.8-15 (2011)
포텐셜 필드 기법을 이용한 무인차량의 자율항법 개발
이 상 원
1)․문 영 근
1)․김 성 현
2)․이 민 철
*3)부산대학교 기계공학부1)․부산정보대학 자동차계열2)․부산대학교 기계공학부3)
Navigation Technique of Unmanned Vehicle Using Potential Field Method
Sangwon Lee 1) ․Younggeun Moon 1) ․Sunghyun Kim 2) ․Min Cheol Lee *3)
1)
Graduate School of Mechanical Engineering, Pusan National University, Busan 609-735, Korea
2)
Automoble Department, Busan College of Information Technology, Busan 616-737, Korea
3)
School of Mechnical Engineering, Pusan National University, Busan 609-735, Korea (Received 18 December 2009 / Accepted 14 March 2011)
Abstract : This paper proposes a real-time navigation algorithm which integrates the artificial potential field (APF) for an unmanned vehicle in the unknown environment. This approach uses repulsive potential function around the obstacles to force the vehicle away and an attractive potential function around the goal to attract the vehicle. In this research, laser range finder is used as range sensor. An obstacle detected by the sensor creates repulsive vector.
Differential global positioning system (DGPS) and digital compass are used to measure the current vehicle position and orientation. The measured vehicle position is also used to create attractive vector. This paper proposes a new concept of potential field based navigation which controls unmanned vehicle's speed and steering. The magnitude of repulsive force based on the proposed algorithm is designed not to be over the magnitude of attractive force while the magnitude is increased linearly as being closer to obstacle. Consequently, the vehicle experiences a generalized force toward the negative gradient of the total potential. This force drives the vehicle downhill towards its goal configuration until the vehicle reaches minimum potential and it stops. The effectiveness of the proposed APF for unmanned vehicle is verified through simulation and experiment.
Key words : Unmmand vehicle(무인자동차), Differential Global Positioning System(DGPS, 보정위성항법장치), Obstacle avoidance(장애물 회피), Laser range finder(레이저레인지파인더), Digital compass(전자나침반), Potential field(포텐셜 필드)
1. 서 론 1)
오늘날 자동차는 단순한 이동수단을 넘어서 전 기, 전자, 기계, 등의 많은 분야의 첨단기술들이 집 약된 첨단시스템으로 발전하고 있다. 현재 운전자 의 편의와 안전을 위한 운전자 보조 시스템(driver assistant system) 개발이 급진전 되고 있는 추세이며 대표적인 운전자 보조 시스템에는 안전 시스템 분 야인 차선 이탈 경보(lane departure warning), 차선 유
*
Corresponding author, E-mail: [email protected]
지(lane keeping), 사각지대 검출(blind spot detection),
주차 지원 시스템(parking assist system) 등이 개발되
어 실용화 되고 있다. 텔레매틱스와 지능형교통시
스템 등과 같은 ITS(Intelligent Transport System) 기
술이 개발되고 이러한 기술들의 융합을 통하여 무
인자율주행차량 개발이 실용화 되고 있다. 기존에
연구 되었던 대부분의 무인차량 관련 연구들을 보
면 비전센서를 이용하여 차선 인식을 통해 주행하
는 차량 조향 기술 연구, 목적지와 주행경로가 주어
졌을 경우 GPS(Global Positioning System) 위치정보
포텐셜 필드 기법을 이용한 무인차량의 자율항법 개발
를 이용한 자율주행에 관한 연구가 주로 이루어 져 왔다. 1-5) 또한 무인차량의 주행 중 장애물과 충돌을 방지하기 위해 거리측정센서를 이용한 장애물 회피 알고리즘에 관한 연구가 있다. 6-9)
본 논문에서는 주로 이동로봇(mobile robot)의 경 로계획법으로 연구되어온 포텐셜 필드(potential field)기법을 무인차량에 적용하기 위해서 척력이 발생하는 반경 범위와 , 최소한의 차량의 회전반경 만 보장하기 위한 반경 범위를 설정하여 차량의 위 치에 따라 서로 다른 조건의 척력을 발생시켜 장애 물과의 충돌 없이 목표지점으로 효율적으로 이동할 수 있는 알고리즘을 제안한다. 이때 척력의 크기는 인력의 절대값의 크기보다 크지 않도록 정의하여 과도한 회피를 방지하도록 한다. 또한 조향각도 및 주행속도 제어를 통해서 장애물과 충돌 없이 목적 지점까지 주행하기 위한 자율항법 시스템을 개발한 다. 새로운 포텐셜 필드 기법의 검증을 위해서 시뮬 레이션을 통한 주행 평가를 하였고, 실제 전기식 무 인차량 시스템을 구성하여 실험을 수행하였다. 환 경 인식 및 위치 인식을 위해서 DGPS(Differential Global Positioning System), 전자나침반, 레이저레인 지파인더(laser range finder)를 이용하였다.
2. 포텐셜 필드 기법을 이용한 무인차량의 자율항법
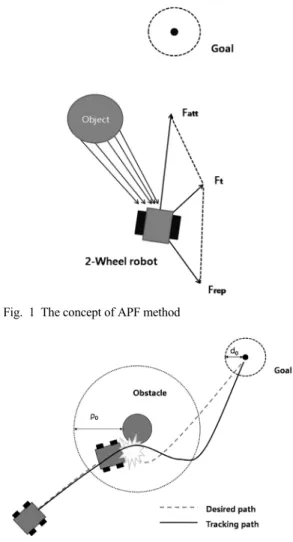
포텐셜 필드 기법은 이동로봇의 경로계획 목적으 로 Fig. 1과 같이 로봇을 장애물로부터 멀어지게 하 는 척력의 포텐셜 와 목표점으로 당기게 하는 인력의 포텐셜 가 존재한다. 두 포텐셜의 합
에 의해 로봇은 포텐셜의 힘이 큰 쪽에서 작은 쪽으로 이동하여 장애물을 회피하며 목표점에 도달 할 수 있다. 10,13)
포텐셜 필드 기법은 계산량이 적어 실시간 처리 가 가능하고 임의의 환경에 대해서 적용 가능한 장 점이 있지만 무인차량에 적용하기에는 다소 어려움 이 있다. 이동로봇의 경우 2-Wheel구조로 방향 전환 에 대한 구속이 없으나 무인차량의 경우 전륜조향 방식의 구조를 가지고 있으므로 차량조향 각속도 및 회전반경 등 많은 요소들이 작용되어 Fig. 2와 같 이 포텐셜 필드 기법 차량에 적용할 경우 차량의 미
Fig. 1 The concept of APF method
Fig. 2 Problems of the application for APF method
지경로를 추종하기 어렵기 때문에 장애물을 원활하 게 피할 수 없게 된다.
따라서 무인차량에 적합한 개선된 포텐셜 필드 기법이 요구된다. 본 연구에서는 포텐셜 함수를 무 인차량의 방향전환을 위한 공간을 확보하기 위해 척력을 보다 강한 힘을 가질 수 있도록 재정의 한 다.
Fig. 3은 새로 제안한 포텐셜 필드 기법의 개념도
이다. 장애물과 로봇 사이의 떨어진 거리가 장애물
주변의 반경 과 의 어디에 있는지에 따라 척력
을 두 단계로 나누어 줄 수 있도록 한다. 이 때 차량
의 최대 조향각도, 조향 각속도에 따른 차량의 회전
반경을 고려하여 장애물과 충돌하지 않도록 하기
위해 장애물 주변의 반경 과 를 선정한다.
Sangwon Lee․Younggeun Moon․Sunghyun Kim․Min Cheol Lee
Fig. 3 The concept of APF method for unmanned vehicle
2.1 인력의 포텐셜 함수
인력의 포텐셜 함수 는 식 (2)와 같이 방향과 크기를 가지는 벡터이며 차량을 목표점으로 유도하 는 작용을 한다.
(1) Case 1: ≥
⋅
(2)
Case 2:
(3)
여기서 는 차량의 현재좌표에서 목표좌표까지 의 거리이며, 는 차량의 현재좌표, 는 목표좌표, 는 인력의 비례상수이다. 차량의 목표 점 거리가 목표점 영역인 밖에 있을 경우 일정한 크기의 인력이 생성되며, 이내 영역에 있을 경우 인력이 존재하지 않는다.
2.2 척력의 포텐셜 함수
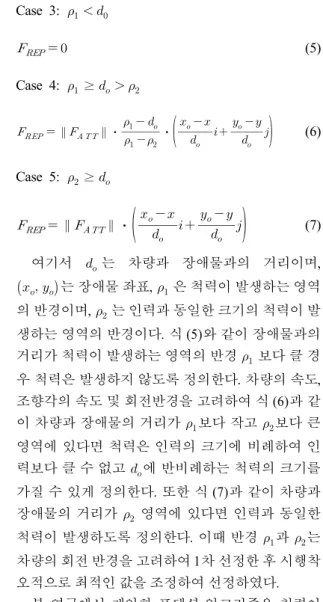
척력 포텐셜 함수 는 식 (6), 식 (7)과 같이 방 향과 크기를 가지는 벡터이며 장애물로부터 멀어지 게 하는 작용을 한다. 차량과 가장 근접한 장애물에 의해 생성된다.
(4)
Case 3:
(5)
Case 4: ≥
∥
∥ ⋅
⋅
(6)
Case 5: ≥
∥ ∥ ⋅
(7)
여기서 는 차량과 장애물과의 거리이며,
는 장애물 좌표, 은 척력이 발생하는 영역 의 반경이며, 는 인력과 동일한 크기의 척력이 발 생하는 영역의 반경이다. 식 (5)와 같이 장애물과의 거리가 척력이 발생하는 영역의 반경 보다 클 경 우 척력은 발생하지 않도록 정의한다. 차량의 속도, 조향각의 속도 및 회전반경을 고려하여 식 (6)과 같 이 차량과 장애물의 거리가 보다 작고 보다 큰 영역에 있다면 척력은 인력의 크기에 비례하여 인 력보다 클 수 없고 에 반비례하는 척력의 크기를 가질 수 있게 정의한다. 또한 식 (7)과 같이 차량과 장애물의 거리가 영역에 있다면 인력과 동일한 척력이 발생하도록 정의한다. 이때 반경 과 는 차량의 회전 반경을 고려하여 1차 선정한 후 시행착 오적으로 최적인 값을 조정하여 선정하였다.
본 연구에서 제안한 포텐셜 알고리즘은 척력이 인력보다 커질 수 없으며 차량에서 장애물의 거리 가 가까워질수록 선형적으로 증가하는 척력이 발생 된다. 특히 조향각의 속도 및 회전반경을 고려하여 척력이 발생하는 제한된 범위 안에 차량이 진입하 자마자 진행경로에 큰 영향력이 미친다.
2.3 포텐셜 필드 기법에 의한 조향각도 및
주행속도
포텐셜 필드 기법은 높은 포텐셜에서 낮은 포텐
셜로 흘러가도록 장애물을 회피하며 목표점에 도달
할 수 있다. 주행 경로를 결정하는 공간 포텐셜 필드
값 는 식 (8)과 같이 척력 포텐셜과 인력 포텐셜의
Navigation Technique of Unmanned Vehicle Using Potential Field Method
벡터의 합으로 구할 수 있다. 요구되는 방향 는 식 (9)와 같이 구할 수 있다.
(8)
(9)
여기서 는 의 x, y방향의 성분벡터이 다.
조향각도 는 요구되는 방향 와 현재진행방향
의 차에 의해 식 (10)과 같이 구해진다.
(10)
주행속도는 차량이 목표지점 주변에서의 감속을 위한 반경 밖에 존재한다면 척력의 발생 유무에 따라 두 가지 방법으로 결정된다.
첫째, 척력이 발생하지 않는다면 최고속도 max 로 주행되기 때문에 차량에 요구되는 조향각도 에 따라 식 (11)과 같이 주행속도를 감속하여 목표지점 을 지나침 없이 주행이 가능하도록 정의한다. 둘째, 척력이 발생할 경우 척력의 크기가 커질수록 V는 반비례하도록 식 (12)와 같이 속도를 제어하여 훨씬 안정적으로 장애물을 회피 할 수 있도록 정의한다.
Case 6: if
min max min ⋅
max
max
(11)
if ≠
min max min ⋅
※
(12)
여기서 V는 주행속도이다.
또한 차량이 감속을 위한 영역이내에 존재하게 된다면 현재지점과 목표지점의 거리 차이에 따라 주행속도는 비례하여 감속하도록 식 (13)과 같이 속 도제어를 하게 된다. 차량이 이내에 들어 왔을 때 는 식 (14)와 같이 속도는 0이 된다.
Case 5: ≤
min max min ⋅
(13)
Case 7: ≥
(14)
여기서 는 차량의 조향각, max 은 차량의 최대 조향각도, min 는 차량의 최저속도, max 는 차량의 최대속도, 는 차량의 주행속도이다. 이때 목표지 점 주변의 회전 반경 은 차량의 최고 속도에 따라 차량을 감속하기 위해 결정되며, 는 DGPS의 오차 를 감안하여 목적지의 허용 오차 범위에 따라 결정 된다.
3. 무인차량의 시스템
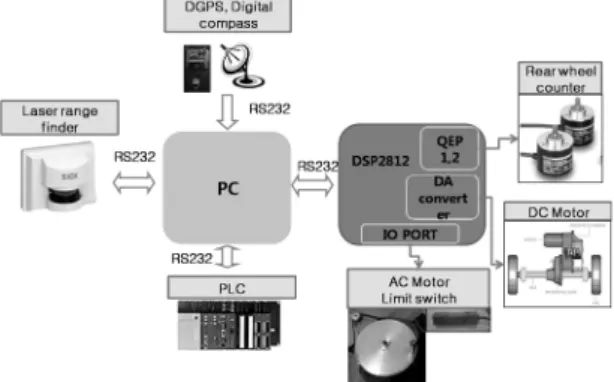
실험 차량으로는 전기식 골프차량에 DGPS, 레 이저레인지 파인더, 전자나침판 등의 센서를 부착 하여 구성하였다. Fig. 4는 실제 구성되어진 실험차 량의 모습이고 Fig. 5는 무인차량의 전체 구성도이 다.
Fig. 4 The unmanned vehicle used in experiments
Fig. 5 Configuration of unmanned vehicle system
이상원․문영근․김성현․이민철
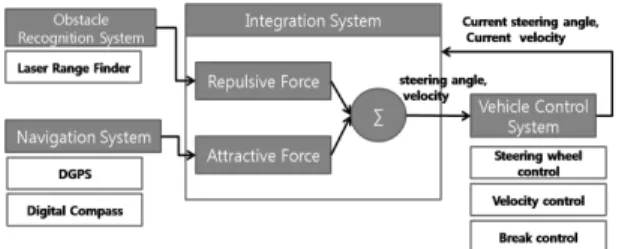
Fig. 6 Block diagram of unmanned vehicle
무인자율주행차량은 장애물인식 시스템, 항법시 스템, 차량제어시스템, 통합시스템인 4개의 시스템 으로 구성되었다. 11,12) Fig. 6은 무인차량의 시스템의 블록선도를 나타낸다.
3.1 차량제어시스템
차량제어시스템은 차량제어의 가장 기본이 되는 횡방향, 종방향 제어를 담당하게 된다. TI사의 TMS320F2812 DSP 프로세서를 이용하여 시리얼통 신을 통해 횡방향 및 종방향의 제어가 가능하도록 구현 하였다.
3.1.1 횡방향제어
Fig. 7과 같이 횡방향 제어를 위해 200W 급 AC 모 터를 사용하였고 기어 비는 5:1이며, 모터축의 풀리 와 조향축의 풀리의 비는 7:1이다. 리미트 센서는 최 대조향각을 파악하기 위해 부착하였다.
Fig. 7 Steering wheel motor and limit sensor for lateral control
3.1.2 종방향제어
종방향 제어를 위해 구동용 DC모터의 드라이 버에 0~5V의 입력을 통해 DC모터의 구동이 가능 하며 주행속도 감속 또는 정지를 위해 리니어 모 터를 사용하여 구현하였다. Fig. 8은 종방향 제어 를 위한 구동용 DC모터 및 브레이크용 리니어모 터이다.
Fig. 8 Rear wheel motor and breaking motor for Longitudinal control
3.2 항법시스템
항법시스템은 차량의 현재위치에 대한 위도, 경 도 데이터 및 진행방향을 파악한다.
DGPS와 전자나침반으로 구성되어있고 DGPS는 Ublox사의 EVK-5H를 사용하였으며 현재위치에 대 한 위도, 경도 데이터, 시간, 등의 정보를 얻을 수 있 다. DGPS에 의해 획득된 절대 위치 좌표값은 목표 지점까지의 인력과 장애물과의 척력을 계산하는데 이용된다. 디지털 컴퍼스(digital compass)는 Honey Well사의 HMC6352칩을 사용하여 진북방향을 기준 으로 시계방향으로 방위각을 얻을 수 있도록 하였 으며, 이를 이용해 차량의 진행방향을 파악하여 조 향 각도 제어에 활용된다.
3.3 장애물인식시스템
장애물인식시스템은 차량의 전방에 대한 장애물 인식 역할을 한다. 이를 위한 거리센서로 Fig. 9와 같 은 SICK사의 실외용 LMS291_S05 레이저레인지파 인더를 사용하여 장애물인식 시스템을 구성하였고 LMS291_S05는 최대 각도 범위 180° 최대 측정거리 80m, 그리고 각도 분해능 0.25° / 0.5° / 1° 의 성능을 가지고 있다. Fig. 9와 같이 부착하였고 실제 측정 결 과이다.
Fig. 9 Result of obstacle detecting using the laser range finder
포텐셜 필드 기법을 이용한 무인차량의 자율항법 개발
3.4 통합시스템
통합시스템은 장애물인식시스템, 항법시스템, 차량제어시스템 정보들을 통합하여 포텐셜 필드 기 법을 적용한 차량의 조향각도, 및 속도를 계산하여 차량제어시스템으로 교시하는 역할을 한다.
통합제어시스템을 위한 메인컴퓨터는 노트북을 사용하였고 프로그램은 Table 1과 같은 환경에서 제 작되었다. 차량의 DGPS의 위치정보, 목표지점과의 거리와 방위각의 정보, 현재 차량의 속도 등의 정보 를 실시간으로 확인하고 제어 할 수 있도록 Fig. 10 과 같이 통합제어시스템이 구성되었다.
Table 1 Programming environment
- CPU : Inter(R) Core2 Duo CPU T7300 2.00GHz - RAM : 2GB
- OS : Microsoft Windows XP SP3 - Programming tool : Visual Studio 6.0
Fig. 10 The program of Integration system
4. 시뮬레이션
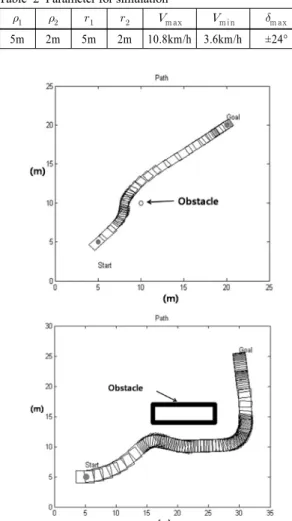
무인차량에 적용하기 위해서 새로 제안한 포텐셜 필드 기법을 시뮬레이션 하였다. 우선 지름 30cm 원 의 형태의 장애물과 길이 10m, 폭 1m의 사각형 장애 물 2개의 종류에 대해 차량이 회피하는 시뮬레이션 을 수행하였다. 시뮬레이션 영향에 미치는 각각의 파라미터들은 Table 2와 같이 설정하였다. 시뮬레이 션 결과는 Fig. 11과 같다. 차량이 장애물과 인접함 에 따라 주행속도를 줄여 안정적으로 회피하였고 목표점에 접근함에 따라 감속하여 안전하게 정지함
Table 2 Parameter for simulation
m ax m i n
m ax5m 2m 5m 2m 10.8km/h 3.6km/h ±24°
Fig. 11 Simulation result
을 알 수 있다. 즉 무인차량에 적합하게 개선되어진 포텐셜 기법이 실제 차량에서도 충분히 적용 가능 하다는 것을 의미한다.
5. 주행실험
실험 장소는 부산대학교 운동장이며, 시작점과
목표점의 떨어진 거리는 약 40m이다. 길이 5m, 폭
0.5m의 사각형 장애물과 지름 0.3m의 원형 장애물
을 설치하고 각 파라미터 값은 Table 3와 같이 설정
하여 주행실험을 시행하였다. 주행실험 결과 Fig. 12
와 같이 목표지점에 장애물을 회피하여 안전하게
도달할 수 있었다. 차량이 장애물과 거리가 가까워
짐에 따라 주행속도를 줄여 안정적으로 회피한 후,
Sangwon Lee․Younggeun Moon․Sunghyun Kim․Min Cheol Lee
Table 3 Parameter for experiments
m ax m i n
m ax5m 2m 5m 2m 5.4km/h 3.6km/h ±24°
Fig. 12 Driving test result
목표지점을 도달하기 위해 차량의 회전 방향전환으 로 감속하고 다시 주행속도를 높여 최대설정속도로 주행하다가 목표점에 가까워짐에 따라 설정된 반경 영역 내에서 감속하여 안전하게 정지하였다.
Fig. 13은 주행실험의 동영상을 1초 단위로 사진 으로 기록한 것이며 차량이 장애물에 접근함에 따 라 조향각 및 속도제어를 통해 회피가 이루어지는 장면을 보여준다.
6. 결 론
본 연구에서는 레이저 레인지파인더, DGPS, 전 자나침반을 이용한 무인자율주행차량의 자율주행 을 위한 포텐셜 필드 기법을 제안하고 차량에 적용 하였다. 구현한 자율주행 항법 알고리즘은 시뮬레 이션을 통해 알고리즘의 유효성을 확인하였고 주행
Fig. 13 Screen shot of obstacle avoidance result