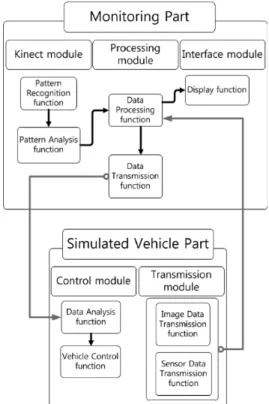
The User Motion Pattern Control System for The Simulated Vehicle
5
0
0
전체 글
(2)
(3)
(4)
(5)
수치
관련 문서
For this purpose, the issues such as the energy consumption pattern, the justification for integrating air pollution control and energy pricing functions,
Five days later, on 15 January 1975, the Portuguese government signed an agreement with the MPLA, FNLA and UNITA providing for Angola to receive its independence on 11
Usefulness of co-treatment with immunomodulators in patients with inflammatory bowel disease treated with scheduled infliximab maintenance therapy.. Oussalah A, Chevaux JB, Fay
The whole system combines the master-slave remote control robotic system (the motion simulator and joystick/haptic interface device), the virtual reality system
Inclusion and Inclusiveness: Shared Vision of Youth for Local, National, and Global Village Inclusion at large stands for embracing populations with disabilities and
웹 표준을 지원하는 플랫폼에서 큰 수정없이 실행 가능함 패키징을 통해 다양한 기기를 위한 앱을 작성할 수 있음 네이티브 앱과
It is impossible to change the voltage across a capacitor by a finite amount in zero time, for this requires an infinite current through the capacitor.. (A capacitor resists
The index is calculated with the latest 5-year auction data of 400 selected Classic, Modern, and Contemporary Chinese painting artists from major auction houses..
