감정 경계를 이용한 로봇의 생동감 있는 얼굴 표정 구현
Life-like Facial Expression of Mascot-Type Robot Based on Emotional Boundaries
박 정 우1, 김 우 현1, 이 원 형2, 정 명 진3
Park Jeong-Woo1, Kim Woo-Hyun1, Lee Won-Hyong2, Chung Myung-Jin3
Abstract Nowadays, many robots have evolved to imitate human social skills such that sociable interaction with humans is possible. Socially interactive robots require abilities different from that of conventional robots. For instance, human-robot interactions are accompanied by emotion similar to human-human interactions. Robot emotional expression is thus very important for humans. This is particularly true for facial expressions, which play an important role in communication amongst other non-verbal forms. In this paper, we introduce a method of creating lifelike facial expressions in robots using variation of affect values which consist of the robot’s emotions based on emotional boundaries.
The proposed method was examined by experiments of two facial robot simulators.
Keywords: Lifelike Facial Expression, Emotional Boundaries, Robot Emotion, Socially Interactive Robot, Robot Gestures
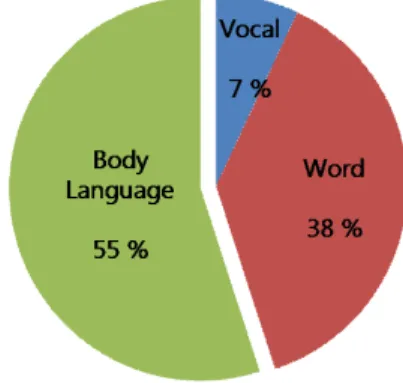
그림 1. Three elements in face-to-face communication
1. 서 론1)
최근 들어 여러 형태의 로봇이 개발되고 있으며, 그 중에서 사람과의 상호 작용을 위해 개발된 로봇을 socially interactive robot이라 일컫는다. 서비스 로봇, 엔터테인먼트 로봇, 교육용 로봇과 같은 socially interactive robot은 일반적으로 사람과 상 호 작용을 하면서 정보를 제공한다. 하지만, 사람들은 로봇과 상호 작용할 때, 로봇이 그들과 유사한 방식으로 행동하기를 바란다[1].
사람들끼리 상호 작용에서는 말, 제스처, 얼굴 표정 등을 통해 정보와 서로의 감정 상태를 주고 받는다. Mehrabian의 법 칙에 의하면 face-to-face communication에서, 얼굴 표정과 제 스처 같은 신체 언어가 50% 이상의 역할을 한다[2, 3]. 즉, socially interactive robot의 경우 얼굴 표정이나 제스처를 어떻 게 구현할 것인가는 매우 중요한 문제이다.
현재 많은 연구자들이 로봇의 얼굴 표정 구현과 관련된 연 구를 하고 있으며, 이는 사람의 신체 부위 중 얼굴이 가장 의
Received: Sep. 9. 2009; Reviewed: Nov. 16. 2009; Accepted: Nov. 25. 2009
※ 본 연구는 지식경제부 지원으로 수행하는 21세기 프론티어 연구개발 사업(인간기능 생활지원 지능로봇 기술개발사업)과 지식경제부 및 정 보통신산업진흥원의 대학 IT연구센터 지원사업의 연구결과로 수행되 었음 (NIPA-2009-(C1090-0902-0007))
1 KAIST 전자전산학부 전기 및 전자공학 전공 박사과정
2 KAIST 전자전산학부 전기 및 전자공학 전공 석사과정
3 KAIST 전자전산학부 전기 및 전자공학 전공 교수
도를 효과적으로 나타낼 수 있는 부위기 때문이다. 하지만 대 부분의 이전 연구[4-11]는 시변적이고 동적인 얼굴 표정 변화와 같은 사람의 본질적인 표정 변화 특성을 고려하지 않아서 로 봇의 표정이 목표 지점으로 이동한 후, 움직임이 없거나 같은 감정에 대해서 항상 같은 표정을 짓는다. 하지만 사람의 표정 은 정적이지 않고, 같은 표정이라도 미세하게 변하며 동일한 감정에 대해 항상 같은 표정을 나타내지도 않는다.
이러한 문제들을 해결하기 위해, 본 논문에서는 LDAEM (Linear Dynamic Affect-Expression Model)[12]과 감정의 경계[15]
를 이용하여 로봇의 감정을 구성하는 기저들의 값을 변화시
a) Doldori simulator (b) FRESi simulator 그림 3. Two kinds of Simulator
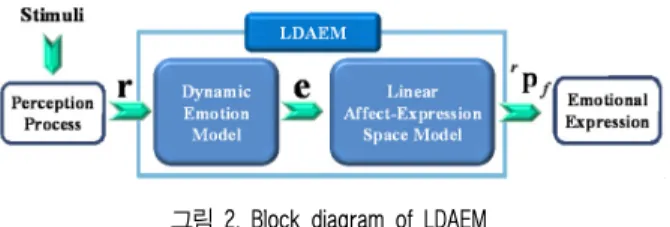
그림 2. Block diagram of LDAEM
킴으로써 동적이며 살아 있는 듯한 로봇의 표정 구현을 위한 방법을 제시하고자 한다.
2. Linear Dynamic Affect-Expression Model (LDAEM)
2.1 LDAEM의 구조
로봇의 얼굴 표정 구현을 위해 LDAEM을 사용한다.
LDAEM은 linear affect-expression space model과 dynamic emotion model로 구성되어 있다[12].
Linear affect-expression space model은 시스템의 복잡도를 낮추면서 로봇의 감정 상태를 효과적으로 표현하기 위해 제 안 되었다[13]. Dynamic emotion model은 정서 공간의 각 기저 에 서로 다른 동적 특성을 적용하여 로봇의 표정 변화를 자연 스럽게 하기 위해 제안 되었다[14]. 즉, LDAEM을 이용하여 서 로 다른 감정 사이에서 로봇의 표정 변화를 사람과 유사하게 구현 할 수 있다.
: dimension of affect space : dimension of expression space
1 2
0 1, 1,
,
k
e
p
p T k D
D D
γ
γ γ γ γ
≤ ≤ =
⎡ ⎤
⎢ ⎥
⎣ ⎦
r
r L L
(1)
LDAEM에 대해 요약하면 다음과 같다. 외부 자극이 인지 과정을 통해 Dp개의 표정 중 어떤 표정과 어느 정도 관련 있는 자극([0~1]의 값, r)인지 (1)과 같이 결정된다고 가정하였다.
이 값은 Dp개의 감정 위치(E)와 탄성 계수(K)에 의해 정서 공 간에서의 감정이 현재 자극의 종류와 세기에 따라 해당 위치 로 움직이게 하는 힘 요소(s)로 (2)와 같이 변환된다.
1 2
1 2
1 2
( ) ( )
0 0
0 , : Elasticity Matrix
0
0 0
,
e
p De
D
T
D i i i i
e e e p
D D D D
k
K k K
k
E e e e
K × E ×
= =
⎡ ⎤
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎣ ⎦
⎡ ⎤
⎡ ⎤
⎣ ⎦ ⎣ ⎦
=
e e e e
s r
L M
M O
L
L L
(2)
즉, force element vector r을 s로 변환하여 (3)에 있는 dynamic equation의 입력으로 사용하면, (3)의 해를 구함으로서 현재 감정 상태에서 목표 감정 상태로 변하는 동안의 경로를 얻을 수 있다.
M && e + C e & + K e s =
1 2 1 2
1 1
2 2
,
0 0 0 0
0 0
,
0 0
0 0 0 0
: stimuli inserted
, 1, 2, 3 : stimuli eliminated
: Inertia Matrix, : Viscos
e e
e e
T T
D D
D D
iF i
iB
e e e s s s
m c
m c
M C
m c
c c i
c
M C
= =
⎡ ⎤ ⎡ ⎤
⎣ ⎦ ⎣ ⎦
⎡ ⎤ ⎡ ⎤
⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦
⎧⎨
⎩
e L s L
L L
M M
M O M O
L L
ity Matrix
(3)
결정 된 감정 e는 (4)와 같이 전이 행렬 Tf[13]에 의해 표정 p 로 변환된다. Tf는 설문조사에 의해 결정된 6가지의 선형독립 인 표정 중 3개를 선택하여 정서 공간의 기저로 가정한 후 다 시 그것을 이용하여 6가지 표정을 만들었을 때 원래의 표정과 에러가 가장 작은 표정 3개를 정서 공간의 기저로 정하는 과 정에서 얻을 수 있다[13]. p는 각 컨트롤 포인트(control point, CP)의 정규화된 값을 가지고 있다.
2 ( ) 1( )
1 2
normalized value of control point
transition matrix between affect and expression space
: :
( 1) ( 1),
p p p e
p
f D D D D
T D
i
f
p e
p e
T T T
a a a
a T
D
T
f D D D× ×
=
=
× × ≥
⎡ ⎤
⎣ ⎦
=
p
p e
L (4)
마지막으로 (5)와 같이 p는 비선형 함수 ff 에 의해 각 모터 의 최소, 최대 각도 값을 고려하여 실제 모터 값을 나타내는 rpf
로 변환되어 로봇의 감정이 표정으로 나타나게 된다[13].
≜
≜
≜ ≜
≜ ≜
Distance
1 2 3 4 5 6 7 8
Distance
1 2 3 4 5 6 7 8
그림 4. An example of questionnaire
Dist Neu Ang Sur Dis Sad Fea
1 1.000 1.000 1.000 1.000 1.000 1.000 2 1.000 1.000 1.000 1.000 1.000 1.000 3 1.000 1.000 1.000 1.000 0.962 1.000 4 1.000 1.000 1.000 0.885 0.654 0.885 5 0.731 0.462 0.692 0.308 0.154 0.462 6 0.423 0.154 0.231 0.077 0.000 0.077 7 0.192 0.038 0.038 0.000 0.000 0.038 8 0.000 0.000 0.000 0.000 0.000 0.000 Dist : Distance using Euclidean norm, Neu : Neutrality, Sur : Surprise, Hap : Happiness
Dis : Disgust, Sad : Sadness, Fea : Fear
표 1. Normalized Recognition Rate of Each Image When Emotional State Happiness Goes to Others
( )
1 2
5 5 5 4 4 4 4 5
4 ( 1)
( 1)
( )
( ( 1) (1 ) ( 1) ( 1)), 1, ,6
( ) ( ) ( )
p
r r r
D
r
i i i
i i i i i
i
r p
p r
f D
f D
a a a
a f a
A aU a a U a
U a i
f a U a a A a U a a a
f
×
×
⎡ ⎤
= ⎣ ⎦
=
= + + − −
− − − =
− + −
= −
= p
p L
L
4
4 4 4
1 1
( ( 1) ( 1)), : maximun variation of i-th motor ( ) : unit step function
i
a A U a U a otherwise A
U
⎧⎪ < <
⎨⎪ − − − −
⎩
⋅
(5)
2.2 LDAEM 적용 결과
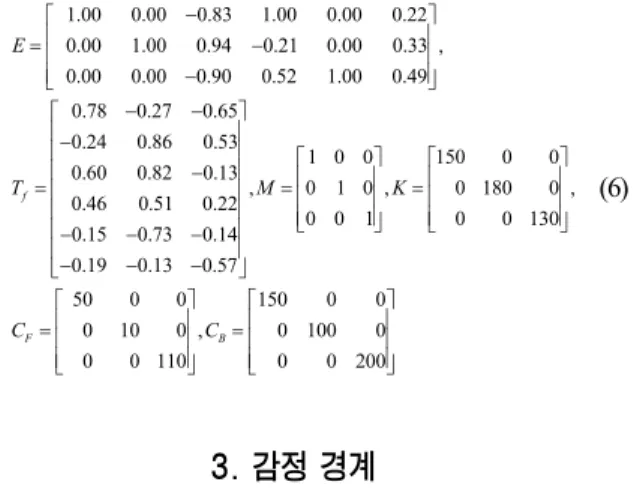
LDAEM을 사용하기 위해서는 먼저 로봇의 표정 공간을 정 의 해야 한다. ‘돌도리(Doldori)’ 시뮬레이터의 경우, 표정 공 간은 6개(Dp=6)의 기저를 갖는다. 6개의 기저는 Ekman이 제 안한 6개의 기본 표정[16]에 해당하는 CP 값에 대응된다. 표정 공간의 기저들을 이용하여 linear affect-expression space model 을 적용하면 ‘돌도리’의 정서 공간은 3차원 (De=3)으로 결정 되고, 정서 공간의 점을 표정 공간으로 사상하는 전이 행렬도 얻을 수 있다. 다음으로 정서 공간의 각 기저에 dynamic emotion model을 적용한다. LDAEM을 적용한 결과는 수식 (6) 과 같다. E와 Tf는 정서 공간의 기저를 결정하는 과정에서 구 해지고[13], M, C, K는 정서 공간의 세 기저의 특성을 고려하 여 실험적으로 결정하였다[14]. ‘FRESi’의 경우에도 ‘돌도리’
에 적용했던 과정을 그대로 적용하였다[12].
1.00 0.00 0.83 1.00 0.00 0.22 0.00 1.00 0.94 0.21 0.00 0.33 , 0.00 0.00 0.90 0.52 1.00 0.49
0.78 0.27 0.65 0.24 0.86 0.53
1 0 0 0.60 0.82 0.13
, 0 1 0
0.46 0.51 0.22 0.15 0.73 0.14 0.19 0.13 0.57
f
E
T M
−
⎡ ⎤
⎢ ⎥
=⎢ − ⎥
⎢ − ⎥
⎣ ⎦
− −
⎡ ⎤
⎢− ⎥
⎢ ⎥
⎢ − ⎥
=⎢ ⎥ =
⎢ ⎥
⎢− − − ⎥
⎢ ⎥
− − −
⎣ ⎦
150 0 0
, 0 180 0 ,
0 0 1 0 0 130
50 0 0 150 0 0
0 10 0 , 0 100 0
0 0 110 0 0 200
F B
K
C C
⎡ ⎤ ⎡ ⎤
⎢ ⎥ =⎢ ⎥
⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦
⎡ ⎤ ⎡ ⎤
⎢ ⎥ ⎢ ⎥
=⎢ ⎥ =⎢ ⎥
⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦
(6)
3. 감정 경계
LDAEM을 사용하면 로봇의 감정을 정서 공간에 수치적으 로 표현할 수 있고 현재 로봇의 감정에서 다음 감정으로 바뀌 는 동안 감정의 이동 경로도 얻을 수 있다. 이 때, 감정에 따른
표정은 전이행렬에 의해 찾을 수 있으므로 표정을 이용하여 정서 공간에서 감정들 사이의 기하학적 거리를 구할 수 있다. 정서 공간에서 감정의 경계를 찾는 과정을 요약하면 아 래와 같다.
1. (7)을 이용하여 하나의 표정과 나머지 다른 표정들 사이 의 선형 보간 된 이미지를 얻을 수 있다.
0 6
1 1
, , , ,
, ,
( , ) , ( , )
, 0,..., 6
,
( , ) ( )
6
[ ,..., ] (1 )[ ,..., ]
6 6
i j
p p
s j i i
T T
D j D i
j i
Neutral Anger Surprise Happiness Disgust Sadness Fear
i j i j
wherer s i j i j s
s a a s a a
= =
=
=
= − +
= + −
p p p p
p p p p
(7)
2. 선형 보간 된 이미지를 사용하여 20~30대 남녀 26명에 대해 설문조사를 하였다. 설문지는 그림 4와 같이 7단계로 변 하는 이미지를 사용하였고, 설문 조사 대상자들에게 왼쪽에 서부터 같은 표정이라고 생각되는 이미지까지 세로 선을 그 어 구분하도록 하였다. 이 때, 두 가지 가정이 필요하다. 첫 째,
그림 5. A Boundary for happiness in expression space 얼굴 표정의 인식률이 80% 이상이면 납득할 만 하다. 둘 째, 설문지의 가장 왼쪽에 있는 표정의 인식률은 100% 라고 가정 한다. 왜냐하면 사람의 표정과 마찬가지로 로봇의 표정도 모 든 사람들에게 100%의 인식률을 가질 수 없기 때문이다.
두 번째 가정에 의해 가장 왼쪽 표정의 인식률은 100% 이 므로 설문 조사 대상자들에게 가장 왼쪽 그림의 왼쪽에는 수 직선을 이용해 구분을 할 수 없도록 하였다. 표 1은 기쁨에 대 한 설문조사 결과이다.
3. 그림 5와 같이 설문 조사 결과를 이용하여 하나의 표정에 대해 다른 6개의 표정으로 변할 때 평균 80% 이상의 인식률을 갖는 6개의 경계 지점을 찾는다.
1 2 3 4 5 6
1 2 3
_
k _
boundary of
between expression i and j in the expression space
† -1
_ _ _
expression vector at
:
= ( ) ,
k
i B ij ij ij ij ij ij
ij
i B ij ij ij ij
T T
i B f i B f f f i B
P
E
E T P T T T P
⎡ ⎤
⎣ ⎦
=
p p p p p p
p
e e e e
4 5 6
k
boundary of
between emotion i and j in the affect space Neutral, Anger, Surprise, Sadness, Disgust, Happiness, Fear,
vector at emotion :
, =
k
ij ij
ij
k
k
i j
j ≠i
⎡ ⎤
⎣ e e ⎦
e
(8)
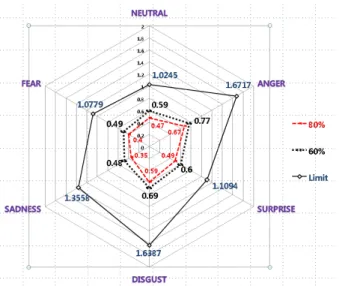
4. 표정 공간에서 6개의 경계 지점은 (8)과 같이 전이 행렬 Tf 의 의사 역 행렬을 이용하여 정서 공간으로 사상된다. 이 점 들을 연결하면 6각형 모양의 감정 경계가 만들어진다. 하지만
정서 공간에서 감정이 dynamic emotion model에 의해 변하므 로 6각형 모양의 감정 경계를 통과하지 않는 경우가 생길 수 있다. 그래서 6개의 경계 지점 중 목표 감정과 거리가 가장 가 까운 것을 반지름으로 정하고, 구 형태의 감정의 경계를 정의 하였다. (9)와 표 2는 각 감정의 반지름을 요약한 것이고, 이로 결정된 구 형태의 감정경계를 그림 6에 나타내었다.
1 2
radius of emotional boundary
:i
p
T D
b
b b b
⎡ ⎤
⎢ ⎥
⎣ ⎦
=
b L
(9)Neu Ang Sur Hap Dis Sad Fea
0.18 0.20 0.31 0.35 0.20 0.32 0.16
표 2. Minimum Distance (Radius) of Emotional Boundary for Each Emotion in Affect Space
그림 6. The spherical-type emotional boundaries with minimum distance in affect space
그림 7. Block diagram of LDAEM with variation of affect values
≜
≜
4. 정서 공간 기저들의 변화를 이용한 생동감 있는 표정 구현
이번 장에서는 LDAEM과 감정의 경계를 바탕으로 생동감 있는 로봇의 표정 구현 방법에 대해 설명한다.
먼저, 외부 자극에 의해 로봇의 감정 상태가 결정되면 정서 공간의 기저를 사용해서 로봇의 감정을 나타낼 수 있다. ‘돌도 리’의 경우 3차원의 정서 공간을 가지기 때문에 감정을 3차원 벡터로 표현할 수 있다. 이 때, 3개의 벡터 성분 값에 수식 (10) 과 같이 random-variation을 추가한다. 여기서 random-varied 감정을 표현하기 위해 새로운 ẽ 변수 를 정의 하였다. 만약 수 식 (3)에 의해 결정된 현재 감정 e가 감정의 경계 밖에 있다면 원래의 감정 값을 사용해서 표정을 만들고, 경계 안에 있다면 감정 값의 각 성분에 random-variation을 추가하여 표정을 구 현한다. 이 때 random-varied 감정이 경계 밖으로 나가는 경우 를 막기 위해 수식 (11)을 적용하였다.
1 2
1 1 2 2
current emotion vector target emotio
( , ) ( , ) ,
,
n () , 1 () 1,
: :
e
e e
T D
T
D D i i
i i
i j
j
i
g e e e
e n e n e n b
g b
rand b rand
v
⎡ ⎤
= = ⎣ ⎦
⎧ +⎡ ⋅ ⋅ ⋅ ⎤ − ≤
⎪ ⎣ ⎦
= ⎨⎪⎩ − >
= ⋅ − < <
e e n
e e e
e n e e e
e e
% % % L %
L
n vector for i-th emotion newly generated emotion vector
velocity of affect value's variation for j-th basis radius of emotional boundary for i-th emotion
: : :
j i
v b e%
(10)
, ,
i i
i i
b b
⎧ − ≤
= ⎨⎪⎪⎩ − >
e e e e e e e
% %
% % (11)
이렇게 함으로써 원래의 감정 이동 경로와는 약간 다른 경 로를 만들어진다. 그래서 로봇의 감정이 목표 감정 값에 머무 르지 않고 계속해서 변화하도록 할 수 있다. 정서 공간에서의 한 점은 표정 공간에서의 한 점으로 사상되므로 감정의 성분 에 random-variation을 추가 하면 살아 있는 듯한 표정을 구현 할 수 있다.
본 논문에서 제안한 방법에는 variation의 범위를 결정하는 것이 매우 중요하다. 만약 범위가 너무 크면 원래의 감정 상태 가 왜곡되어 감정 상태와 어울리지 않는 표정이 발현될 것이 다. 범위가 너무 작다면 생동감 있는 얼굴 표정구현의 효과가 떨어질 것이다. 그래서 variation의 범위를 결정할 때 감정의
경계를 사용하였다. 감정의 경계를 variation의 범위로 사용하 게 되면 원래 로봇의 감정 상태를 왜곡시키지 않으면서 표정 의 미세한 변화로 인해 생동감 있는 얼굴 표정 구현이 가능하 다. Variation에 의해 감정 상태가 많이 왜곡되더라도 최소 80% 이상의 인식률을 가지는 범위에서 표정이 변하기 때문 이다.
5. 실험 결과
본 논문에서 제안한 방법을 Macromedia Flash8.0으로 만든 두 개의 얼굴 로봇 시뮬레이터에 적용하였다. ‘돌도리’ 시뮬 레이터는 10 DOFs 이고 ‘FRESi’ 시뮬레이터는 ‘돌도리’ 보다 더 풍부한 표정을 위하여 13 DOFs 사용하였다.
Linear affect-expression space model을 ‘돌도리’ 시뮬레이터 에 적용하여 3차원의 정서 공간을 얻었다. 그리고 dynamic emotion model을 적용 한 후 정서 공간의 각 기저에 random-variation을 추가하였다. 그림 8 (a)는 로봇의 감정이 혐 오 일 때 random-variation 을 추가한 것이고 (b)는 random-variation 을 추가하지 않은 원래의 값이다. 그림 9는 그림 8 (a), (b)에 대응하는 표정 변화를 나타낸다. 그림 9 (a)의 파란색 사각형 안에 있는 이미지의 표정들은 서로 미세한 차 이가 있지만 (b)의 파란색 사각형 안에 있는 이미지들은 차이 가 없다. 이미지들의 나열이 제안된 논문의 효과를 보여주기 힘든 부분이 있어 아래 홈페이지에서 동영상으로 확인 할 수 있도록 하였다. (http://rr.kaist.ac.kr/avi/Doldori_simulator.avi)
본 논문에서 제안한 방법의 효과를 좀 더 검증하기 위하여 다른 얼굴 로봇 시뮬레이터인 ‘FRESi’ 에도 같은 방법을 적용 해 보았다. 먼저 Linear affect-expression space model을 적용하 여 4 차원의 정서 공간을 찾을 수 있었다. 그래서 4개의 기저 에 random-variation을 추가하였다.
그림 10 (a)는 슬픔 감정일 때 random-variation이 추가 된 경 우의 각 기저의 변화를 나타내고 (b)는 random-variation이 추 가되지 않은 원래의 값의 변화를 나타낸다. 그림 11에는 그림 10에 대응하는 얼굴 표정 변화를 나열하였다.
‘돌도리’의 표정 변화와 마찬가지로 그림 11 (a)의 파란색 사각형 안의 표정들은 서로 약간의 차이가 있지만 (b)에서는 모두 같은 표정이다. 그리고 random-variation의 효과가 ‘돌도 리’ 에서보다는 더 잘 나타나는 것을 알 수 있다. 이것은
‘FRESi’ 의 자유도가 더 많아서 미세한 변화를 더 잘 표현할 수 있기 때문으로 분석된다. FRESi 의 표정 변화 동영상도 아래 홈페이지에서 확인할 수 있다.
(http://rr.kaist.ac.kr/avi/FRESi.avi)
0 50 100 150 200 250 300 350 400 450 -1
-0.5 0 0.5 1 1.5
# of samples
affect value
affect1 affect2 affect3
(a) Affect value changes with variation
0 50 100 150 200 250 300 350 400 450
-1 -0.5 0 0.5 1 1.5
# of samples
affect value
affect1 affect2 affect3
(b) Affect value changes without variation 그림 8. Affect value with variation and without variation for disgust on ‘Doldori’ simulator
(a) facial expressions corresponding to 그림 8 (a) (b) facial expressions corresponding to 그림 8 (b) [그림 9] Sequence of facial expressions corresponding to 그림 8 (a) and (b)
0 50 100 150 200 250 300 350 400 450 500
-1 -0.5 0 0.5 1 1.5
# of samples
affect value
affect1 affect2 affect3 affect4
(a) Affect value changes with variation
0 50 100 150 200 250 300 350 400 450 500
-1 -0.5 0 0.5 1 1.5
# of samples
affect value
affect1 affect2 affect3 affect4
b) Affect value changes without variation 그림 10. Affect value with variation and without variation for sadness on ‘FRESi’
(a) facial expressions corresponding to 그림 10 (a)
(b) facial expressions corresponding to 그림 10 (b) 그림 11. Sequence of facial expressions corresponding to 그림 10 (a) and (b)
6. 결 론
본 논문은 로봇의 얼굴 표정을 좀 더 사람과 유사하고 살아 있는 것처럼 보이게 하도록 구현하는 방법을 제안하였다. 구 체적인 과정을 요약하면, linear affect expression space model을 사용하여 개발된 로봇의 정서 공간과 정서 공간의 기저를 찾 고, dynamic emotion model을 적용하여 각 기저의 특성을 정의 하고 정서 공간에서 로봇 감정의 이동 경로를 얻는다. 그리고 기저의 특성과 감정의 경계를 고려하여 random-variation을 적 용하게 된다. 이를 두 개의 얼굴 로봇 시뮬레이터에 적용하여 그 효과를 검증하였다.
지금까지는 단지 얼굴 표정에 대하여 제안된 모델을 적용 하였다. 하지만 최근 들어 자연스러운 인간-로봇 상호작용을 위해 제스처의 중요성이 커지고 있다. 그래서 로봇 제스처를 효과적으로 생성하기 위한 연구가 필요하고, 본 논문에 적용 한 방법을 이용한 제스처 생성에 이용할 수 있도록 연구를 진 행하고 있다.
참 고 문 헌
[1] Terrence Fong, Illah Nourbakhsh, Kerstin Dautenhahn,
“A survey of socially interactive robots”, Robotics and Autonomous Systems, pp. 143-166, 2003
[2] Mehrabian, A.,“Nonverbal Communication”, Publishers, Psychology, 2007.
[3] Mehrabian, A.,“Communication without words”, Psychology Today, 2 (9), 52-55, 1968.
[4] C.Breazeal, “Designing Sociable Robots”, Cambridge, MA: The MIT Press, Cambridge, 2002.
[5] H. Miwa, T. Okuchi, K. Itoh, H. Takanobu, and A.
Takanishi, “A New Mental Model for Humanoid Robots for Human Friendly Communication”, Proceedings of the 2003 IEEE International Conference on Robotics & Automation Taipei, Taiwan, September 14-19, 2003.
[6] A. J. N. Van Breemen, “Animation engine for believable interactive user-interface robots,” Proc. of 2004 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 2873-2878, Oct. 2004.
[7] C. Becker, S. Kopp, I. Wachsmuth, “Simulating the Emotion Dynamics of a Multimodal Conversation Agent”, ADS 2004, LNAI 3068, pp. 154–165, 2004.
[8] S. Sosnowski, A. Bittermann, K. Kuhnlenz, M. Buss,
“Design and Evaluation of Emotion-Display EDDIE”, Proceedings of the 2006 IEEE/RSJ, International Conference on Intelligent Robots and Systems, October 9 - 15, 2006, Beijing, China
[9] T. Fukuda, M. J. Jung, M. Nakashima, F. Arai, and Y. Hasegawa, “Facial expressive robotic head system for human–robot communication its application in home environment, special issue on human interactive robots for psychological enrichment,” Proc. IEEE, vol.
92, pp. 1851–1865, Nov. 2004.
[10] H. Shibata, M. Kanoh, S. Kato, and H. Itoh, “A system for converting robot ‘emotion’into facial expressions”, Proceedings of the 2006 IEEE International Conference on Robotics and Automation, May 2006
[11] T. Usui, K. Kume, M. Yamano, and M. Hashimoto,
“A Robotic KANSEI Communication System Based on Emotional Synchronization”, IROS 2008
[12] Hui Sung Lee, Jeong Woo Park, Su Hun Jo and Myung Jin Chung, “A Linear Dynamic Affect- Expression Model: Facial Expressions According to Perceived Emotions in Mascot-Type Facial Robots”, in Proceedings 16th IEEE International Conference on Robot & Human Interactive Communication, Aug 26, 2007.
[13] Hui Sung Lee, Jeong Woo Park and Myung Jin Chung, “A Linear Affect–Expression Space Model and Control Points for Mascot-Type Facial Robots”,
Robotics, IEEE Transactions, Vol. 23, No. 5, October 2007.
[14] J.W. Park, H.S. Lee and M.J.Chung, “Dynamic Emotion Model in 3D Affect Space for a Mascot-Type Facial Robot,” The Journal of Korea Robotics Society, Vol. 2, No. 3, pp. 282-287, Sep, 2007
[15] J.W. Park, H.S. Lee, S.H. Jo, M.G. Kim, M.J. Chung
“Emotional Boundaries for Choosing Modalities according to the Intensity of Emotion in a Linear Affect-Expression Space,” 17th IEEE International Symposium on Robot and Human Interactive Communication, Aug 2, 2008
[16] P. Ekman and W. V. Friesen, Unmasking the Face, Cambridge: Malor Books, 2003.
박 정 우
2005 경북대학교 전자전기공 학부(공학사)
2007 KAIST 전자전산학부 전 기 및 전자공학전공(공 학석사)
2007~현재 KAIST 전자전산학 부 전기 및 전자공학전공 박사과정
관심분야 : Emotional expression of mascot-type robots, Human-robot interaction.
E‐mail : [email protected]
김 우 현
2007 KAIST 전기및전자공학 과 (공학사)
2009 KAIST 전기및전자공학 과 (공학석사)
2009~현재 KAIST 전기및전 자공학과 박사과정 관심분야 : 인간-로봇 상호작용, 로봇 제스처 표현,
로봇 비전
E-mail : [email protected]
이 원 형
2008 KAIST 전기전자공학과 (공학사)
2008~현재 KAIST 전기전자 공학과 석사과정 2008 KAIST HRI센터 위탁연
구원
관심분야 : Human-robot interaction, 감정로봇 E-mail : [email protected]
정 명 진
1973 서울대학교 공과대학 전 기공학과(공학사) 1977 미시간대학교 전기공학
과(공학석사)
1983 미시간대학교 제어공학 과(공학박사)
1976 국방과학연구소 연구원
1981~1983 미시간대학교 CRIM 연구 조교 1983~현재 KAIST 전자전산학부 교수
관심분야 : 서비스 로봇, Human-robot interaction E‐mail : [email protected]