학 술 논 문
http://dx.doi.org/10.9718/JBER.2015.36.5.228
228
균형 재활 훈련을 위한 특정 회전 움직임에서 피검자 동작 분석을 위한 깊이 센서 기반 키넥트 시스템의 정확성 및 부정확성 평가
김충연·정호현
1·전성철
2·장경배
3·전경진
한국생산기술연구원 의료복지그룹, 1세종대학교 기계공학과
2부산테크노파크 고령친화센터, 3고려사이버대학교 기계제어공학과
Evaluation of Accuracy and Inaccuracy of Depth Sensor based Kinect System for Motion Analysis in Specific Rotational Movement
for Balance Rehabilitation Training
ChoongYeon Kim, HoHyun Jung
1, Kyung Bae Jang
3and Keyoung Jin Chun
Department of Advanced Biomedical Engineering Lab., Korea Institue of Industrial Technology, Cheonan 331-822, Korea
1
Mechanical Engineering, Sejong University, Seoul, Korea
2
R&D Team, Senior Products Industrial Center, Busan, Korea
3
Mechanical and Control Engineering, The Cyber University of Korea Seoul, Korea (Manuscript received 24 September 2015; revised 13 October 2015; accepted 14 October 2015)
Abstract: The balance ability significantly decreased in the elderly because of deterioration of the neural muscu- lature regulatory mechanisms. Several studies have investigated methods of improving balance ability using real-time systems, but it is limited by the expensive test equipment and specialized resources. Recently, Kinect system based on depth data has been applied to address these limitations. Little information about accuracy/inaccuracy of Kinect system is, however, available, particular in motion analysis for evaluation of effectiveness in rehabilitation training.
Therefore, the aim of the current study was to evaluate accuracy/inaccuracy of Kinect system in specific rotational movement for balance rehabilitation training. Six healthy male adults with no musculoskeletal disorder were selected to participate in the experiment. Movements of the participants were induced by controlling the base plane of the balance training equipment in directions of AP (anterior-posterior), ML (medial-lateral), right and left diagonal direc- tion. The dynamic motions of the subjects were measured using two Kinect depth sensor systems and a three-dimen- sional motion capture system with eight infrared cameras for comparative evaluation. The results of the error rate for hip and knee joint alteration of Kinect system comparison with infrared camera based motion capture system occurred smaller values in the ML direction (Hip joint: 10.9~57.3%, Knee joint: 26.0~74.8%). Therefore, the accu- racy of Kinect system for measuring balance rehabilitation traning could improve by using adapted algorithm which is based on hip joint movement in medial-lateral direction.
Key words: Balance Ability, Balance Training, Motion Capture System, Kinect System, Base Plane
I. 서 론
고령화에 따른 신경 근육계 조절기전의 약화로[1], 균형 능력이 감소된 고령자의 균형 능력 증진을 위하여 가변 기 저면 위에 피검자를 위치시켜 피검자의 신경계 및 근골격계 기능을 증진시키는 방법이 현재 일반적으로 사용되고 있다 [2-5]. 또한 이러한 방법에 있어 생체역학적 관점의 균형 능 Corresponding Author : Keyoung Jin Chun
89, Yangdaegiro-gil, Ipjang-myeon, Seobuk-gu, Cheonansi, Chungcheongnam-do, 331-822, Korea
TEL: +82-41-589-8430 / PHONE: +82-10-3171-6345) E-mail: [email protected]
이 연구는 보건복지부 보건의료연구개발사업(HI12C1496) 과제 지
원을 받아 수행하였음.
229 력 평가를 위하여, 기본적으로 인체 질량 중심(Center of
Body Mass, COM) 및 압력 중심(Center of Body Pre- ssure, COP) 과 관절 가동 범위(Range of Joint Motion, ROM) 변화 특성들에 대한 분석이 기본적으로 이루어지고 있으며[6-9], 이를 기반한 보다 고도화된 균형 지수(Balance Index) 개발과 이를 활용한 연구가 수행되고 있다[10-13].
특히, Hur 등[10]은 피검자 골반의 후방 방향에서 하중을 주어 동요(perturbation)를 일으킨 후 발생하는 COM과 COP 의 특성 변화를 복합적으로 활용하여 분석한 균형 지 수를 제시하였으며, Mayagoita 등[11]과 Yang 등[12]은 관성 센서 기반 시스템을 사용하여 직립상태에서 측정된 가 속도 및 속도 변화와 COP 의 특성 변화를 활용한 균형 지 수를 제시하였고, Clark 등[13]은 양발에 걸친 체중 부하 대칭도(Weight bearing asymmetry) 와 COP 를 복합적 으로 활용한 균형 지수를 제시하고 각 연구 결과에서 이러 한 균형 지수 변화 특성을 분석하여 균형 능력 정도를 평가 하고자 하였다. 그러나 이러한 균형 능력 평가를 위해서는 기본적으로 고가의 적외선 카메라 기반 삼차원 모션 캡쳐 시스템 또는 관성 센서 기반 시스템 등의 특수 시험 장비가 요구되고 있으며, 이러한 시험 장비 설치를 위한 공간 및 숙 련된 인력 제공의 제약과 실시간 데이터 분석을 통한 결과 제공이 제한되는 점 등의 한계점을 내포하고 있다. 결과적 으로 지속적이고 최적화된 균형 훈련 제공을 위한 실시간 균형 능력 평가 및 반영에 있어 본질적인 제약성을 가지고 있다. 이러한 문제점을 해결하기 위하여 최근 가격이 다소 저렴한 깊이 센서 기반 키넥트 시스템을 적용한 균형 훈련 과 동작 분석 평가를 위한 시스템으로 개발 활용하고자 하 는 시도가 이루어지고 있으나[14-17], 깊이 센서 기반 키넥 트 시스템이 피검자의 운동 방향에서 정량적으로 평가된 검 증 연구가 다소 미비한 실정이다.
Clark 등[18]은 보행 특성 분석 조건에서 하체 관절의 움 직임 평가에 있어 깊이 센서 기반 키넥트 시스템의 활용 가 능성이 높음을 최근 검증하였으나, 이는 기저면의 움직임이 없는 상태에서 상대적으로 주기적이고 한정된 움직임을 만 들어 내는 단순 보행에 국한하여 연구를 수행한 한계점을 가지고 있다. 최근 이러한 한계점을 고려하여 Lim 등[19]
은 기저면의 다양한 회전 움직임 상태에서 비주기적이고 복 합적 움직임을 만들어 내는 균형 훈련에 있어 깊이 센서 기 반 키넥트 시스템의 활용 가능성이 있음을 검증하였다. 그 러나 이 연구에서는 피검자의 동적 움직임 유도를 위하여 임의적인 무작위방향으로 기저면을 제어하는 조건에서 진행 되어, 어느 방향의 회전 움직임에서 깊이 센서 기반 키넥트 시스템의 정확성이 담보되는지 그리고 어느 방향의 회전 움 직임에서 깊이 센서 기반 키넥트 시스템의 오류가 어느 정 도 발생되는지에 대한 평가가 고려되지 않은 한계점을 가지
고 있다. 따라서 본 연구에 있어서는 특정 기저면의 움직임 방향에 따른 균형 훈련 시 피검자의 균형 능력을 평가하기 위한 동작 분석에 있어 특정 방향의 회전 움직임에서 깊이 센서 기반의 키넥트 시스템이 어느 정도 정확성과 오류를 가질 수 있는지에 대하여 검증하고자 하였다.
II. 연구 방법
1. 피검자 선정
피검자는 근골격/신경계에 장애가 없으며, 균형 능력이 정 상 범주에 속하는 건강한 성인 남성 6명(나이: 26.2세 ± 3.7) 으로 선정하였다. 평균 신장, 체중 그리고 체질량 지수(BMI, Body Mass Index) 는 175.2 ± 4.5 cm, 72.6 ± 5.4 kg, 22.1 ± 3.1 kg/m
2이었다. 모든 피검자를 대상으로 시험 시 발생될 수 있는 위험 사항 및 시험 방법에 대하여 충분히 숙지 시키 고, 최종적으로 시험동의서에 서명한 후 시험을 진행하였다.
2. 동적 움직임 유도를 위한 시험 장치 구성 및 측정 방법 기존의 연구 결과와 직접 비교를 위해 기존에 자체 제작 된 균형 훈련 장비를 사용하여 피검자의 동적 움직임을 유 도하였다(그림 1). 균형 훈련 장비는 발판 부위에 연결된 6 개의 링크가 ± 0.1 m 수직 방향으로 이동하여 발판 부위가 최대 ± 15
o범위 내에서 다양한 축을 기준으로 자유로이 회 전이 가능하도록 제작하고 안전을 위하여 기저면의 최대 회 전 동작 범위를 회전축을 중심으로 ± 9
o로 제한하였다. 시 험은 피검자의 AP 방향(Anterior-Posterior) 과 ML 방향 (Medial-Lateral) 과 두 방향이 결합된 좌측 및 우측 대각 선 방향(Diagonal), 총 4가지 방향의 피검자 동적 움직임 이 유도되도록 기저면이 제어되도록 설정하여 진행하였으며, 피검자는 가능한 스스로 균형을 유지 할 수 있는 범위 내에 서 동적 움직임을 허용하였다. 또한 측정 및 시험 오류를 최 소화하기 위하여 피검자당 한 방향에서 3번 반복적으로 수 행하여 총 6번의 실험을 진행하였으며, 이전 시험으로 인한 피검자의 운동피로도 영향을 가능한 최소화하기 위하여 각 시험 사이간 10분의 휴식 시간을 피검자에게 부여하였다.
피검자의 동적 움직임 측정을 위하여 2대의 깊이 센서 기
반 키넥트 시스템(Kinect for xbox 360, Microsoft, USA,
Sampling rate: 300 Hz) 과 8대의 적외선 카메라 기반 삼
차원 모션 캡쳐 시스템(T-10s, VICON Motion System
Ltd., UK, Sampling rate: 100 Hz) 을 사용하였다. 이때 적
외선 카메라 기반 삼차원 모션 캡쳐 시스템은 깊이 센서 기
반 키넥트 시스템의 피검자 동적 움직임 측정 정확성을 검
증하기 위하여 사용하였다. 그리고 피검자 동적 움직임의 정
량화를 위하여, 각 시스템으로부터 획득된 동적 움직임 정
보를 기반으로 인체 질량 중심 및 주요 하체 관절인 엉덩이
230
관절과 무릎 관절의 각도 변화를 분석 평가하였다. 깊이 센 서 기반 키넥트 시스템을 통하여 획득된 동적 움직임에 대 한 분석은 iPi motion capture studio (iPi soft, Russia) 와 Biomech addon (iPi soft, Russia)을 사용하여 수행하 였으며, 적외선 카메라를 기반 삼차원 모션 캡쳐 시스템을 통하여 획득된 동적 움직임에 대한 분석은 Nexus (NEXUS, VICON Motion System Ltd., UK) 을 이용하여 수행하였 다. 마지막으로 각 시스템으로부터 최종적으로 획득된 주요 하체 관절 각도 변화를 서로 비교 평가하여 깊이 센서 기반 키넥트 시스템을 검증하였다.
3. 통계 분석
깊이 센서 기반 키넥트 시스템과 적외선 카메라 기반 삼차 원 모션 캡쳐 시스템을 통하여 획득된 피검자의 하체 관절 각도 변화의 에러율을 각도 변화 범위에 대한 차이로 정의 하였다. 또한, 피검자의 운동 방향에 대해 발생한 에러율에 대한 유의한 차이를 확인하기 위하여, 통계 분석 프로그램 SPSS(IBM SPSS Software, USA)을 사용하여 일원배치 분산분석(One-way ANOVA: Analysis of variance) 를 실시하였다. 이때 유의수준인 p < 0.05에서 통계적 유의성 을 검증하였으며 비교 대상간의 유의한 차이를 가질 때 표 에 기호(*)로 표시하였다.
III. 연구 결과
피검자의 동적 움직임 동안 깊이 센서 기반 키넥트 시스
템과 적외선 카메라 기반 삼차원 모션 캡쳐 시스템을 통하 여 획득된 하체 관절 각도 변화를 표 1에 나타내었다. 엉덩 이 관절의 경우, 깊이 센서 기반 키넥트 시스템을 통하여 측정 분석된 Flexion-Extension, Adduction-Abduction, Internal-External Rotation 움직임에 대한 엉덩이 관절 각도 변화 범위는 Random motion 에서 20.43 ± 4.76
o, 14.14
o± 7.53
o, 37.48 ± 30.67
o발생한 것에 비교하여 AP 방향에서 9.82 ± 3.53
o, 8.53 ± 2.90
o, 16.83 ± 2.20
o, ML 방 향에서 12.08 ± 5.20
o, 10.84 ± 4.42
o, 18.76 ± 9.17
o, 오른 쪽 대각방향에서 11.98 ± 3.34
o, 8.2 ± 2.37
o, 21.87 ± 6.09
o, 왼쪽 대각방향에서 16.14 ± 3.72
o, 7.7 ± 2.78
o, 21.4 ± 3.45
o로 확인되었다. 적외선 카메라 기반 삼차원 모션 캡쳐 시스 템을 통하여 측정 분석된 엉덩이 관절 각도 변화 범위는 Random motion 에서 17.14 ± 3.89
o, 13.52 ± 2.31
o, 18.25 ± 7.53
o발생한 것에 비교하여 AP 방향에서 7.52 ± 5.41
o, 5.46 ± 3.43
o, 6.08 ± 3.01
o, ML 방향에서 12.58 ± 3.41
o, 8.98 ± 0.94
o, 21.03 ± 7.16
o, 오른쪽 대각방향에서 11.54 ± 3.01
o, 9.58 ± 4.1
o, 15.09 ± 6.75
o, 왼쪽 대각방향에서 14.75 ± 6.99
o, 9.16 ± 3.70
o, 15.02 ± 7.87 로 확인되었다. 무릎 관 절의 경우, 깊이 센서 기반 키넥트 시스템을 통하여 측정 분 석된 값은 Random motion 에서 31.09 ± 22.23
o, 16.81 ± 8.88
o, 34.61 ± 26.61
o발생한 것에 비교하여 AP 방향에서 8.75 ± 2.91
o, 16.44 ± 6.50
o, 14.90 ± 2.66, ML 방향에서 20.05 ± 7.16
o, 7.84 ± 4.18
o, 19.73 ± 5.23, 오른쪽 대각방 향에서 16.02 ± 2.57
o, 8.33 ± 2.46
o, 21.24 ± 6.82
o, 왼쪽 대각 방향에서 20.19 ± 8.11
o, 7.76 ± 2.75
o, 6.59 ± 2.17
o로
그림 1. 동적 움직임 유도를 위한 실험 장치 및 운동 분석 장비 구성도.Fig. 1. Experiment configuration for dynamic motion generation of participant and motion capture systems used in experiment.
231
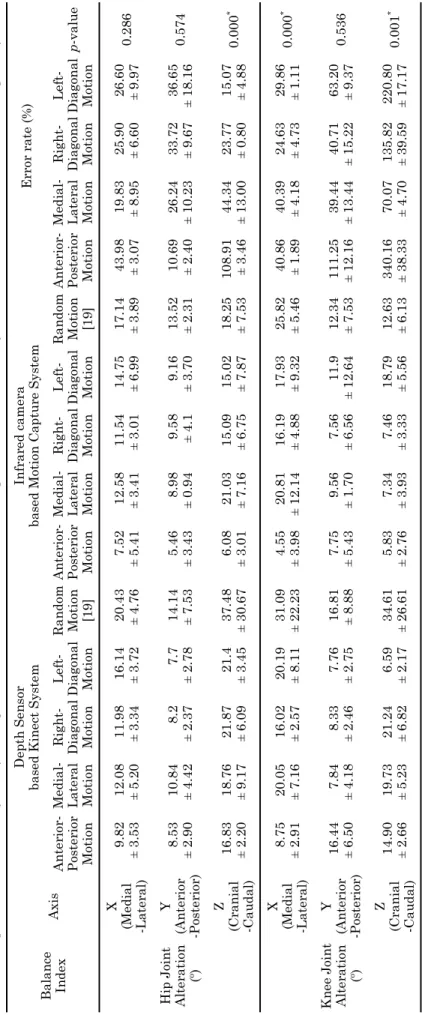
표 1. 깊이 센서 기반 키넥트 시스템과 적외선 기반 동작 분석 시스템의 하체 관절 각도 변화 및 에러율 비교. Table 1. Comparison of motion analysis on joint angle alteration and error rate between depth sensor based kinect system and infrated camera based motion capture system. Balance IndexAxis Depth Sensor based Kinect SystemInfrared camera based Motion Capture SystemError rate (%) Anterior- Posterior Motion
Medial- Lateral Motion Right- Diagonal Motion Left- Diagonal Motion
Random Motion [19]
Anterior- Posterior Motion Medial- Lateral Motion Right- Diagonal Motion Left- Diagonal Motion
Random Motion [19]
Anterior- Posterior Motion Medial- Lateral Motion Right- Diagonal Motion
Left- Diagonal Motionp-value Hip Joint Alteration (o)
X (Medial -Lateral)
9.82 ±3.5312.08 ±5.2011.98 ±3.3416.14 ±3.7220.43 ±4.767.52 ±5.4112.58 ±3.4111.54 ±3.0114.75 ±6.9917.14 ±3.8943.98 ±3.0719.83 ±8.9525.90 ±6.6026.60 ±9.970.286 Y (Anterior -Posterior)
8.53 ±2.9010.84 ±4.428.2 ±2.377.7 ±2.7814.14 ±7.535.46 ±3.438.98 ±0.949.58 ±4.19.16 ±3.7013.52 ±2.3110.69 ±2.4026.24 ±10.2333.72 ±9.6736.65 ±18.160.574 Z (Cranial -Caudal)
16.83 ±2.2018.76 ±9.1721.87 ±6.0921.4 ±3.4537.48 ±30.676.08 ±3.0121.03 ±7.1615.09 ±6.7515.02 ±7.8718.25 ±7.53108.91 ±3.4644.34 ±13.0023.77 ±0.8015.07 ±4.880.000* Knee Joint Alteration (o)
X (Medial -Lateral)
8.75 ±2.9120.05 ±7.1616.02 ±2.5720.19 ±8.1131.09 ±22.234.55 ±3.9820.81 ±12.1416.19 ±4.8817.93 ±9.3225.82 ±5.4640.86 ±1.8940.39 ±4.1824.63 ±4.7329.86 ±1.110.000* Y (Anterior -Posterior)
16.44 ±6.507.84 ±4.188.33 ±2.467.76 ±2.7516.81 ±8.887.75 ±5.439.56 ±1.707.56 ±6.5611.9 ±12.6412.34 ±7.53111.25 ±12.1639.44 ±13.4440.71 ±15.2263.20 ±9.370.536 Z (Cranial -Caudal) 14.90 ±2.6619.73 ±5.2321.24 ±6.826.59 ±2.1734.61 ±26.615.83 ±2.767.34 ±3.937.46 ±3.3318.79 ±5.5612.63 ±6.13340.16 ±38.3370.07 ±4.70135.82 ±39.59220.80 ±17.170.001*
232
확인되었다. 이때 적외선 카메라 기반 삼차원 모션 캡쳐 시 스템을 통하여 측정 분석된 무릎 관절 각도 변화 범위는 Random motion 에서 25.82 ± 5.46
o, 12.34 ± 7.53
o, 12.63 ± 6.13
o발생한 것에 비교하여 AP 방향에서 4.55 ± 3.98
o, 7.75 ± 5.43
o, 5.83 ± 2.76
o, ML 방향에서 20.81 ± 12.14
o, 9.56 ± 1.70
o, 7.34 ± 3.93
o, 오른쪽 대각방향에서 16.19 ± 4.88
o, 7.56 ± 6.56
o, 7.46 ± 3.33
o, 왼쪽 대각방향에서 17.93 ± 9.32
o, 11.9 ± 12.64
o, 18.79 ± 5.56
o로 확인되었다.
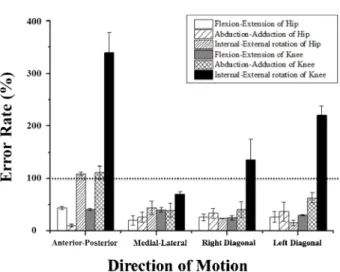
하체 관절 각도 변화 범위에 대해 적외선 카메라 기반 삼 차원 모션 캡쳐 시스템의 측정값과 비교한 깊이 센서 기반 키 넥트 시스템에서 측정된 값의 오차율을 표 1과 그림 2에 나 타내었다. 엉덩이 관절의 x축(medial-lateral), y축(anterior- posterior), z 축(cranial-cauda) 에 대한 오차율은 Anterior- Posterior 움직임 유도 방향에서 43.98 ± 3.07%, 10.69 ± 2.40%, 108.91 ± 3.46% 이였으며, Medial-Lateral 움직임 유도 방향에서 19.83 ± 8.95%, 26.24 ± 10.23%, 44.34 ± 13.00%, Diagonal 움직임 유도 방향의 경우 오른쪽 방향 은 25.90 ± 6.60%, 33.72 ± 9.67%, 23.77 ± 0.80%, 왼쪽 방향은 26.60 ± 9.97%, 36.65 ± 18.16%, 15.07 ± 4.88%
이였다. 무릎 관절의 x축(medial-lateral), y축(anterior- posterior), z축(cranial-cauda) 에 대한 오차율은 Anterior- Posterior 움직임 유도 방향에서 40.86 ± 1.89%, 111.25 ± 12.16%, 340.16 ± 38.33% 이였으며, Medial-Lateral 움직 임 유도 방향에서 40.39 ± 4.18%, 39.44 ± 13.44%, 70.07 ± 4.70% iagonal 움직임 유도 방향의 경우 오른쪽 방향은 24.63 ± 4.73%, 40.71 ± 15.22%, 135.82 ± 39.59%, 왼쪽
방향은 29.86 ± 1.11%, 63.20 ± 9.37%, 220.80 ± 17.17%
이였다.
IV. 고 찰
균형 훈련 시 만들어지는 피검자의 다양한 움직임을 측정 분석하는데 있어, 기저면이 무작위방향으로 가변되는 이전 의 연구 결과에서 깊이 센서 기반 키넥트 시스템은 인체 질 량 중심 변화 특성과 하체 관절의 제한된 굴곡-신전(Flexion- Extension) 움직임 변화 특성만을 분석 활용하는 것이 정 확성을 담보 할 수 있을 것으로 판단되었다[19]. 본 연구에 서 진행되어 정확한 움직임 유도 방향에 상응하는 하체 관 절의 측정값 오차율 결과에 따르면, 엉덩이 관절에서 발생 한 오차값은 AP 방향에서 z축(cranial-caudal) 에 대한 움 직임을 제외한 나머지 모든 움직임에서 상대적으로 적었다.
무릎 관절에서 발생한 x축(medial-lateral) 에 대한 오차값 은 모든 움직임에 대하여 상대적으로 적게 발생하였으며 y 축(anterior-posterior) 에 대한 오차값의 경우, AP 방향 움 직임 유도시에 상대적으로 높은 값이 발생하였다. z축 (cranial-caudal) 에 대한 오차값의 경우 ML 방향 움직임 유도시를 제외한 나머지 모든 움직임이 상대적으로 큰 값이 발생하였다. 이러한 결과에 따르면, ML 방향에서 발생한 동 적 움직임에 대한 측정 결과가 AP 방향으로 발생한 동적 움직임에 대한 측정 결과에서 y축(anterior-posterior) 에서 발생한 각도 변화를 제외한 모든 조건에서 보다 더 정확한 결과를 얻었다. 그러나 기저면이 움직이는 조건에서 무릎 관 절에 대한 움직임은 오차가 상대적으로 높아 항상 신뢰도가 낮은 제한된 값을 측정하였다. 이러한 한계점은 다음의 이 유로 발생된 것으로 판단되었다. 첫째, 깊이 센서 기반 키넥 트 시스템은 기본적으로 게임 컨트롤러 목적으로 개발되어 해상도가 낮은 640 × 480 pixel 범위에서 시스템 정면인 x 축(medial-lateral) 방향의 방향의 피검자의 지속적이고 동 작이 큰 동적 움직임을 최우선적으로 측정하는 장비로서 개 발되었기 때문인 것으로 사료된다[20]. 즉 피검자 정면인 ML 방향에서 발생하는 움직임에 비해 상대적으로 작은 동 적 움직임이 발생하는 y축(anterior-posterior) 방향과 z축 (cranical-caudal) 방향에 대한 관절 각도 변화 측정에 있 어, 정확도가 담보된 적외선 카메라 기반 삼차원 모션 캡쳐 시스템에 비하여 상대적으로 큰 오차율이 발생하였다. 둘째, 깊이 센서 기반 키넥트 시스템은 지면이 고정된 상태에서 카메라에 측정되는 깊이 영상 데이터를 기반으로 발목 관절 로부터 하반신의 움직임을 측정하고 어깨 및 척추에서부터 상체와 엉덩이 관절의 움직임을 측정하는 2중의 알고리즘을 사용하는 장비로서 개발되었다[21,22]. 따라서 기저면이 가 변되는 균형 훈련 환경에 있어, 발목 관절이 지면에 고정되
그림 2. 하체 관절 각도 변화 범위에 대한 적외선 카메라 기반 삼차원 모션 캡쳐 시스템의 측정값과 비교한 깊이 센서 기반 키넥트 시스 템에서 측정된 값의 오차율 비교.
Fig. 2. Comparison of error rate in depth sensor based Kinect system on Flxeion-Exteison, Abduction-Adduction, Internal-Exteranl rotation of hip and knee joint in a viewpoint of direction of motion.
233 어 있지 않은 상태에서 무릎 관절과 같은 부위의 움직임은
알고리즘의 한계로 오차율이 상대적으로 큰 값이 발생 한 것으로 판단된다 이러한 부정확한 측정값을 보정하기 위해 서 기저면이 가변되는 조건의 경우, 기저면이 움직이는 조 건에서도 원활하게 움직임 추적이 가능한 엉덩이 관절과 어 깨 및 척추 움직임을 기준점으로 삼아 사용자의 하체 동적 움직임 분석이 진행되는 알고리즘 개선이 필요 할 것으로 판단된다. 또한, 시스템의 정면을 벗어나는 z축(cranial- caudal) 방향의 움직임은 키넥트 시스템 측정값이 부정확하 기 때문에 과도하게 오차율이 발생하는 z축 방향의 움직임 은 ML 방향의 움직임을 기준으로 하여 오차가 발생하기 전 의 값을 활용하여 측정값을 보정하는 것이 키넥트 시스템의 정확성을 향상시킬 수 있다고 판단된다.
V. 결 론
깊이 센서 기반 키넥트 시스템의 정면에 해당하는 피검자 의 Frontal Plane 평면에서의 Medial-Lateral 방향의 엉 덩이 관절 변화 특성 분석에서 적외선 카메라 기반 3차원 동작분석 장비와 비교 했을 때 오차율이 최소 10.9% 에서 최대 57.3% 로 발생하였다. 동일 조건에서 무릎 관절의 경 우, 오차율이 최소 26.0% 에서 74.8% 로 발생하였다. 따 라서 균형 재활 훈련을 위해 기저면이 움직이는 조건에서 사용자의 하체 관절 각도 변화 측정값의 정확성을 향상시키 기 위해서는 ML 방향의 엉덩이 관절 측정값을 기준으로 하 는 알고리즘 개선과 측정값 보정이 필요한 것으로 판단되며, 정확도가 향상된 키넥트 카메라를 이용하여 비주기적이고 복합적인 균형 훈련간 사용자의 하체 관절 움직임에 대한 분석 평가가 가능할 것으로 판단된다.
References
[1] S.P. Baker, A. Harvey, “Fall injuries in the elderly,” Clin.
Geriatr. Med., vol. 1, no. 3, pp. 501-512, 1985.
[2] A. Srivastava, A.B. Taly, A. Gupta, S. Kumar, T. Murali,
“Post-stroke balance training: Role of force platform with visual feedback technique,” J. Neurol. Sci., vol. 1, pp. 89-93, 2009.
[3] P. Lisi ski, J. Huber, E. Gajewska, P. Sz api ski, “The body balance training effect on improvement of motor functions in paretic extremities in patients after stroke: A randomized, single blinded trial,” Clin. Neurol. Neurosurg., vol. 114, no.
1, pp. 31-36, 2012.
[4] R.A. Clark, A.L. Bryant, Y. Pua, P. McCrory, K. Bennell, and M. Hunt, “Validity and reliability of the Nintendo Wii Bal- ance Board for assessment of standing balance”, Gait pos- ture, vol. 3, pp. 307-310, 2010.
[5] B. Lange, S. Flynn, R. Proffitt, C.Y. Chang, and A. Rizzo,
“Development of an interactive game-based rehabilitation tool for dynamic balance training”, Top. Stroke. Rehabil., vol.
17, no. 5, pp. 345-352, 2010.
[6] Y.C. Pai, K. Iqbal, “Simulated movement termination for bal- ance recovery: can movement strategies be sought to main- tain stability in the presence of slipping or forced sliding?”, J. Biomech., vol. 32, no. 8, pp.779-786, 1999.
[7] E.L. Harrison, N. Duenkel, R. Dunlop, G. Russell, “Evalua- tion of single-leg standing following anterior cruciate liga- ment surgery and rehabilitation”, Phys. Ther., vol.74, no. 3, pp. 245-252, 1994.
[8] D.A. Winter, “Human balance and posture control during standing and walking”, Gait posture, vol. 3, no. 4, pp. 193- 214, 1995.
[9] A. Hof, M. Gazendam, W. Sinke, “The condition for dynamic stability”, J. Biomech., vol. 38, no. 1, pp. 1-8, 2005.
[10] P. Hur, B. Duiser, S.M. Salapaka, E.T. Hsiao-Wecksler,
“Measuring robustness of the postural control system to a mild impulsive perturbation”, IEEE. Trans. Neural. Syst.
Rehabil. Eng., vol. 18, no. 4, pp. 461-467, 2010.
[11] R.E. Mayagoitia, J.C. Lötters, P.H. Veltink, H. Hermens,
“Standing balance evaluation using a triaxial accelerometer”, Gait posture, vol. 16, no. 1, pp. 55-59, 2002.
[12] C.C. Yang, Y.L. Hsu, “A review of accelerometry-based wearable motion detectors for physical activity monitoring”, Sensors, vol. 10, no. 8, pp.7772-7778, 2010.
[13] R.A. Clark, R. McGough, K. Paterson, “Reliability of an inexpensive and portable dynamic weight bearing asymme- try assessment system incorporating dual Nintendo Wii Balance Boards”, Gait posture, vol. 34, no. 2, pp. 288-291, 2011.
[14] N. Vernadakis, V. Derri, E. Tsitskari, P. Antoniou, “The effect of Xbox Kinect intervention on balance ability for previously injured young competitive male athletes: a pre- liminary study”, Phys. Ther. Sport., vol. 15, no. 3, pp. 148- 155, 2014.
[15] C.J. Su, C.Y. Chiang, J.Y. Huang, “Kinect-enabled home- based rehabilitation system using Dynamic Time Warping and fuzzy logic”, Appl. Soft. Comput., vol. 22, pp. 652-666.
2014.
[16] M. van Diest, J. Stegenga, H.J. Wörtche, K. Postema, G.J.
Verkerke, C.J. Lamoth, “Suitability of Kinect for measuring whole body movement patterns during exergaming”, J. Bio- mech., vol. 47, no. 12, pp. 2925-2932, 2014.
[17] B. Lange, C.Y. Chang, E. Suma, B. Newman, A.S. Rizzo, M.
Bolas, “Development and evaluation of low cost game-based balance rehabilitation tool using the Microsoft Kinect sen- sor”, In Proc. 33rd Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Boston, USA, Sep. 2011, pp. 1831-1834.
[18] R.A. Clark, K.J. Bower, B.F. Mentiplay, K. Paterson, Y.H.
Pua, “Concurrent validity of the Microsoft Kinect for assess- ment of spatiotemporal gait variables”, J. Biomech., vol. 46, no. 15, pp. 2722-2725, 2013.
[19] D.H. Lim, C.Y. Kim, H.H. Jung, D.Y. Jung, K.J. Chun, “Use of the Microsoft Kinect system to characterize balance abil- ity during balance training”, Clin. Interv. Aging., vol. 10, pp.
1077-1083, 2015.
[20] F. Menna, F. Remondino, R. Battisti, E. Nocerino, “Geomet-
n
′ l′
n′
234
ric investigation of a gaming active device”, In Proc, SPIE Optical Metrology, San Diego, USA, Sep. 2011, pp. 1-16.
[21] J. Shotton, T. Sharp, A. Kipman, “Real-time human pose rec- ognition in parts from single depth images”, Commun.
ACM., vol. 56, no. 1, pp. 116-124, 2013.
[22] M. Greenberg, J. Gronley, J. Perry, R. Lewthwaite. “Concur- rent validity of observational gait analysis using the vicon motion analysis system”, Gait posture, vol. 2, no. 4, pp. 167- 168, 1996.