무인항공기를 위한 3.7V 단일 배터리 셀 고효율 전력관리 회로시스템
강운성1·황선남1·장호정1·김현식2,†
1단국대학교 전자전기공학과
2단국대학교 디스플레이공학과
3.7-V Single Battery-Cell High-Efficiency Power Management Circuit and System for UAV-Drones
Woonsung Kang1, Sunnam Hwang1, Ho Jung Chang1, and Hyun-Sik Kim2,†
1Department of Electronics and Electrical Engineering, Dankook University, 152, Jukjeon-ro, Suji-gu, Yongin-si, Gyeonggi-do 16890, Korea
2Department of Display Engineering, Dankook University, 119, Dandae-ro, Dongnam-gu, Cheonan-si, Chungcheongnam-do, Korea (Received September 18, 2017: Corrected September 23, 2017: Accepted September 26, 2017)
초 록: 본 논문은 드론의 체공시간 증대를 위해 고효율 전력관리 회로 및 시스템을 제안한다. 종래의 드론은 다수개 의 직렬 배터리와 낮은 효율의 선형 레귤레이터 사용으로 무겁고 발열이 크며 이로 인한 전력누수 문제가 있었다. 본 논 문에서는 3.7V 단일 Li-Po 배터리 셀을 사용할 수 있는 스위칭 방식의 승압형 DC-DC 전력변환 회로에 대한 연구를 다 룬다. 본 연구를 통해 시제품 개발 결과 3.7V 입력, 5V 출력의 step-up regulation을 실현하였다. 또한 종래 선형 레귤레 이터의 50% 수준이었던 전력효율 대비 최대 91.3% 효율과 50oC 이하의 표면온도를 달성하였으며, 0.02V/V 및 0.15V/
A의 line/load regulation 성능을 측정으로 검증하였다. 본 연구결과를 통해 3.7V 단일 셀 배터리 사용으로 충방전을 위한 별도의 cell-balancing 회로가 필요하지 않게 되며, 높은 전력관리 효율로 드론의 체공시간을 획기적으로 개선시킬 수 있 는 가능성을 확인하였다.
Abstract: This paper presents a highly efficient power management system for UAV-drones. For free from the battery cell-balancing issue, the proposed system allows the drone to utilize a single-cell Li-Po battery. To realize low-voltage input of 3.7V, the switch-mode step-up DC-DC converter is optimally designed with high power efficiency. The prototype DC-DC converter was implemented with an output voltage of 5V, which will be provided to digital parts of the drone.
The power efficiency was measured to be max. 91.3% with low surface temperature. The measured line and load regulations were 0.02V/V and 0.15V/A, respectively. Thanks to the proposed power management system, the available time-to-fly of the drone is expected to be significantly extended in virtue of the enhanced power efficiency.
Keywords: UAV-Drone, power management, regulator, switch-mode power supply (SMPS), boost converter
1. Introduction
무인항공기(unmanned aerial vehicle, UAV)는 사람이 탑 승하지 않은 채로 지상의 무선전파에 의해 조종이 가능 한 비행기나 헬리콥터를 지칭하며 현재 전 세계적으로 각 광받고 있는 형태는 쿼드콥터 이상의 멀티콥터 드론 (drone)이다.1) 군사용으로 개발이 시작된 드론은 최근에 고성능 센서 등 부가기능을 탑재하면서 레저용, 취미용 및 농업용 등으로 그 활용 범위가 지속적으로 확대되고
있다.2)특히, 항공 촬영용 및 방재용 등에서 사용되는 드 론의 활용성을 극대화하기 위해서는 운용(체공)시간이 매 우 중요하게 여겨지고 있다. 드론의 체공시간을 늘리기 위해서는 드론 각 부품의 경량화 기술, 고용량 경량 배터 리 기술, 드론 전자부품의 저전력화 기술 등이 필요하며 각 기술별로 다양한 연구가 활발히 진행되고 있다.3)
대다수의 드론 제품들은 높은 토크(torque) 모터의 필요성 으로 구동전압이 다소 높기때문에 다수 개의 3.7V 리튬폴 리머(Li-Po) 배터리 셀을 직렬(series)로 연결하여 11.1V~
†
Corresponding author E-mail: [email protected]
© 2017, The Korean Microelectronics and Packaging Society
This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License(http://creativecommons.org/
licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is
properly cited.
22.2V 수준의 높은 배터리 전압을 사용하고 있다.4) 이러한 높은 전압의 배터리 전력공급은 크게 두 가지 문제점이 있 다. 첫째, 2셀(2s) 이상으로 배터리를 직렬 구성 할 경우 충 전 및 방전 시 셀 간의 편차가 발생하게 되며, 배터리 수 명 단축 및 발열의 원인이 된다. 이러한 현상이 극대화 될 경우 폭발 및 발화의 원인이 될 수 있으므로, 배터리 셀 간 편차를 보상해주는 cell-balancing 모듈이 추가로 필요하다.
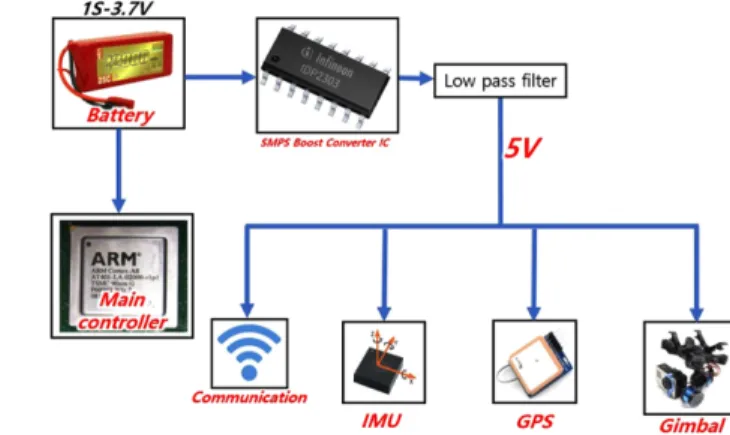
둘째, 이러한 높은 배터리 전압은 모터의 요구사항에 맞 춰져 있기 때문에 낮은 전압을 필요로 하는 드론의 각 센 서 및 메인 컨트롤러(MCU) 등의 부품에는 별도의 전력변 환회로가 필요하다. Fig. 1은 배터리로 구동되는 드론 각 부품의 전력공급 예시를 보여주고 있다. 본 그림에서 볼 수 있듯이 14.8V의 높은 배터리 전압이 linear regulator로 이루어진 battery eliminator circuit (BEC) 부품을 통해 5V 로 step-down 변환되어 각 디지털 부품에 공급되고 있다.
이러한 linear regulator는 많은 전력에너지가 열에너지로 소모되어 그 변환 효율이 50% 수준에 그친다. 이러한 낮 은 전력변환 효율은 배터리 소모를 더욱 촉진시켜 심각한 체공시간 저하를 유발한다.5)
위에서 언급한 문제점들을 해결하기 위해 본 논문은 3.7V single-cell 배터리로 운용될 수 있는 새로운 전력관 리 회로 및 시스템을 제안한다. 단일 셀 배터리 운용을 통 해 드론의 무게를 경감시킬 수 있고 cell-balancing을 추가 적으로 필요로 하지 않기 때문에 배터리 수명 증대 및 발 열 위험을 줄일 수 있다. 각 부품에서 요구되는 전압 공 급을 위해 본 논문에서 제안하는 전력관리 시스템은 3.7V 의 낮은 입력전압을 고효율로 승압(step-up)하여 공급한 다. 종래의 linear regulator를 대체하는 고효율 switch-mode DC-DC converter 회로를 개발하여 적용함으로써 전력효 율 개선으로 드론의 체공시간 극대화를 목표로 한다.
2. Proposed Power Management Concept
기존의 드론 디지털 부품에 전력을 공급하는 linear regulator는 DC-DC 전력변환 과정에서 회로 내 저항성분
에 의하여 많은 전력에너지가 열에너지로 치환되어 소모 되는 현상이 있다. 본 논문에서는 이러한 전력 손실을 최 소화 하고자 고효율 switch-mode power supply (SMPS) DC-DC 컨버터를 사용하여 드론 디지털 시스템에 전력을 공급 한다. SMPS DC-DC 컨버터는 발열이 매우 낮고, 전 압을 승압하여 전력을 공급할 수 있으므로 단일 셀로 구 성된 저전압 배터리를 사용할 수 있다. 또한 이러한 단일 셀 배터리 채용으로 cell-balancing 기능이 필요하지 않게 되어 충전 및 방전 매커니즘의 단순화로 인하여 배터리 관리가 용이하다. Fig. 2는 본 논문에서 제안하는 고효율 드론 전력관리 시스템의 전력공급 구성도이다. 3.7V 저 전압 단일 셀 배터리로부터 5V 전압으로 승압시키기 위 해서는 SMPS DC-DC 변환방식 중에서 boost converter로 실현이 가능하다.6) 3.7V 단일 셀 배터리는 메인 컨트롤 러와 SMPS DC-DC boost converter 회로에 직접 전력을 공급하고, SMPS DC-DC boost converter 회로는 스위칭 방 식의 PWM 제어를 통해 정류 및 승압된 출력전압 5V를 각 부품에 공급한다. 스위칭 방식의 DC-DC 변환은 출력 전압에 잡음(ripple)이 발생하기 때문에 low pass filter (LPF) 회로를 통해 잡음을 최소화한 후 각종 정밀센서 및 디지털 시스템에 전력을 공급한다. 이러한 전력공급은 전 력변환효율 극대화에 목적을 두고 있다. 다음 절에서는 고효율 DC-DC boost converter 회로 구현에 대한 본 연구 를 자세히 설명한다.
3. Circuit Design of DC-DC Boost Converter
3.1. Topology
Fig. 3는 3.7V 입력전원을 5V 전원으로 승압하여 출력 하는 DC-DC 부스트 컨버터 회로도이다. 이 회로는 입력 에너지를 누적 및 변환하는 인덕터(L1), 인덕터의 전류 방향을 제어하는 다이오드와 MOSFET 스위치, 출력전압 을 정류하는 커패시터(C4)와 저항, 출력전압을 검출하는 저항(R4, R5), 일정한 출력전압을 유지시키는 피드백 loop Fig. 1. Power supply flow in conventional UAV-drones.
Fig. 2. Proposed power management system based on single 3.7V Li-Po battery cell for UAV-drones.
제어 IC, MOSFET 스위치 구동회로(Q2, Q3)로 구성되어 있다. 여기에 피드백 loop의 주파수 안정도 보상회로(C2, C4, R6, R10)와 MOSFET 스위치의 과전류를 방지(short- circuit protection) 회로(R3, C3), 그리고 PWM 주파수를 제 어하기 위한 저항(R2, R7)이 추가된다.
부스트 컨버터는 인덕터에 축적된 에너지가 부하(load) 와 출력 커패시터에 전달되므로 MOSFET 스위치의 on, off 비율에 의하여 출력전압이 결정된다. D(duty ratio)는 스위치와 다이오드의 전압강하를 고려하지 않을 경우 식 (1)로 나타낼 수 있다.7)
(1)
스위치와 다이오드의 전압강하를 고려할 경우 다이오 드의 순방향 전압 강하량 VD와 on 사이클에서의 스위치 에 의한 전압 강하량 VQ를 고려한 식(2)로 결정된다.
(2)
3.2. Inductor Design
인덕터에 흐르는 전류의 파형은 삼각파 형태를 보이므 로 스위치 off 시에 손실이 크며 코어 손실도 주파수가 낮 을수록 적어지므로 가급적 큰 인덕턴스 값을 사용할 필 요가 있다. 하지만 물리적 공간의 제약이 존재하여 인덕 턴스 값을 무한히 키울 수 없으므로 코어를 먼저 선정한 후 최대의 인덕턴스 값을 설계하는 방식을 취하였다. 식 (1)을 이용하여 입력전압 3.7V, 출력전압 5V의 전력변환 에 있어서 D 값을 0.26을 구하고 인덕턴스 값을 식(3)을 통하여 정할 수 있다. 식(3)에서 Iout은 출력전류, fs는 PWM 스위칭 주파수이다.
(3)
스위칭 주파수(fs)를 150 kHz로 설정하면, 인덕턴스 값 은 23 μH로 결정할 수 있다. 코어의 크기를 의미하는 변
수 Ap는 곧 코어가 감당할 수 있는 전력용량을 의미하며 식(4)와 같이 결정될 수 있다.
[cm2] (4)
식(4)를 이용하여 Ap 값을 정할 수 있는데 최대 자속밀 도인 Bm은 0.35T로 하며 창이용율 Ku와 회로방식에 따른 factor Kp의 곱으로 표현되는 winding factor인 K 값은 0.7 그리고 인덕터 전류 ripple의 최대값 IL_peak은 1A로 정하 여 계산하면 Ap은 0.1463cm2로 정해진다. 코어는 Ap 값에 맞는 EE1625S로 선정하였다. 권선의 굵기[mm]는 식(5) 와 같이 인덕터를 흐르는 전류의 평균값 IL_AVG [A]과 전 류밀도 J [A/cm2]의 관계로 나타낼 수 있다.
[mm] (5)
IL_AVG과 J 는 각각 식(6)과 식(7)을 이용하여 도출할 수
있으며, 각각의 값은 출력 부하를 고려하여 IL_AVG = 2A와 J = 703 A/cm2 (ΔT = 35°C)로 정하였다.
[A] (6)
[A/cm2] (7)
따라서 권선의 굵기는 0.6 mm이며 전류 용량을 감안하 여 Φ0.1 × 70인 리츠 와이어를 사용하여 권선하였다. 일 반적인 턴 수와 air gap은 식(8)과 식(9)를 이용하여 구할 수 있다.
[turns] (8)
[mm] (9)
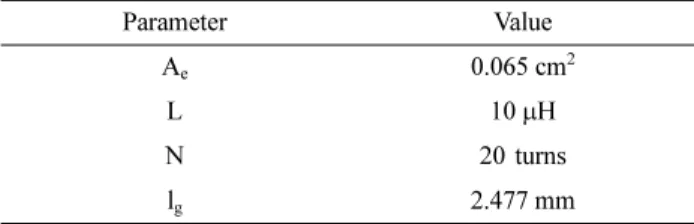
따라서 코어에 20 turns 권선을 하고 2.47 mm air gap을 넣을 경우 인덕턴스 23 μH 이상의 값을 얻을 수 있다.
Table 1은 본 연구를 통해 도출된 인덕터 최적 설계에 대 한 요약 결과이고, Fig. 4는 본 연구의 인덕터 구조와 설 Vout Vin
1–D ---
=
Vout VD Vin–VQ
1–D ---
= +
L D 1 D( – )Vin 2Ioutfs
--- H[ ]
>
Ap Llpk2
104
× 420Bmk ---
1.31
=
∅ 2 IL_AVG
---πJ ×100
=
IL_AVG Iout
1–D ---
=
J 70 Δ AT p–0.125
=
Nmin
LIL_peak BmaxAe
---×104
=
lg
µ0N2Ae ---L ×10–2
= Fig. 3. Schematic of proposed SMPS DC-DC boost converter circuit.
3.3. Output Filter Circuit
SMPS DC-DC boost converter 회로에 있어서 출력단의 설계는 출력 전압의 안정성과 밀접한 관련이 있기때문에 매우 중요하다. SMPS 컨버터는 인덕터 전류 스위칭 동 작으로 출력전압에 항상 리플(ripple) 요소가 포함되어 있 다. 출력전압의 리플 ΔVout을 최소화해야 출력전압을 일 정하게 얻을 수 있으며 출력단의 커패시터가 이러한 출 력전압 리플을 필터링하는 역할을 한다. 다음 식(10)을 이 용하여 출력 커패시터 값(C4)을 결정할 수 있다. 식(10) 에서 RLoad는 부하를 포함한 출력단 총 저항이며 Tsw는 스 위칭 주기 시간이다.8)
[F] (10)
출력단 회로에서 또다른 중요한 요소는 출력전압을 검 출하는 피드백 저항이다. 이 저항회로를 통해 출력전압 은 그 저항 비율만큼 강하된 후 LM3488의 FB 포트에 피 드백 된다. 제어 IC인 LM3488은 피드백 받은 전압과 레 퍼런스 전압 1.26V을 비교하여 PWM 제어를 하게 된다.
다음 식(11)을 이용하면 목표한 출력전압(Vout)을 얻기 위 한 피드백 저항 값을 도출할 수 있다. 여기서 RF1 (Ω)은 Fig. 3에서 R8, R4의 합성저항 값이며 RF2 (Ω)는 R5의 저 항 값이다.
(11)
3.4. PWM Control IC and MOSFET Switch
피드백 제어 및 스위치 구동을 위한 PWM 제어 IC는 낮은 입력전원(3.7V)에서 구동 가능해야 하며, 일정한 출 력전압(5V)을 유지하기 위하여 regulation 피드백 기능이 있어야 한다. 여기에 과전류 방지 및 과전압 등의 보호기 능이 추가되어야 한다. 이를 위해 TI社의 저전압 부스트 컨버터 제어 IC인 LM34889)을 사용하였다. 출력 부하가 바뀌는 상황에서도 일정한 출력전압을 유지하기 위해 출 력전압을 검출하여 제어 IC의 FB 포트에 입력한다. PWM IC는 FB 포트로 입력된 전압을 기준전압과 비교하여 DR 포트를 통해 MOSFET 스위치의 ON/OFF를 제어함으로 써 전체 회로의 출력전압 regulation을 위한 피드백 루프 가 형성된다. 전체 피드백 루프는 고정된 주파수를 기반 으로 pulse width modulation(PWM) 방식으로 제어되며, 이때 고주파수에서의 피드백 안정도와 우수한 과도응답 특성을 위해 Type II 형태의 보상기 회로가 사용되었다.
본 boot converter topology에서는 외부 N채널 MOSFET 의 drain이 인덕터에 연결되고 source가 접지되어야 한다.
DR포트의 전압은 입력 전압에 따라 다르며 이에 따라 MOSFET 스위치 소자의 선정을 고려해야 한다. Table 2 는 MOSFET 스위치 소자 선정 시 고려해야할 파라미터 이다. MOSFET 소자의 gate-source 문턱 전압(Vth)이 3.7V 이하이며, 스위칭 에너지 손실을 최소화 하기 위해 drain- source 간 내부저항(RDS) 값이 최대한 작아야 한다. 또한 고속 스위칭이 가능하여야 하기에 스위치 on 및 off 시에 응답속도가 빨라야 한다. 따라서 gate-source 문턱 전압이 2.2V이하, 내부저항이 1.4mΩ이며, 응답속도가 빠른 NEXPERIA社의 PSMN1R210)를 선정하였다. 이러한 설계 과정을 거쳐 Fig. 3과 같은 SMPS DC-DC 부스트 컨버터 회로를 설계하였다.
4. Experimental Results
앞서 설계된 회로를 바탕으로 시제품 구현을 위해 printed circuit board (PCB)를 Fig. 5와 같이 설계하였다.
PCB는 총 2층으로 구성되었으며, 전력변환 시 커플링 잡 음을 최소화하기 위해 VCC와 GND 배선의 배치를 충분 한 간격을 두고 분리하였다. MOSFET의 스위칭 시에 서 C Vout
2RL oadΔVout
---×DTsw
=
Vout 126 1 RF2
---
⎝ + ⎠
⎛ ⎞
=
Fig. 4. Inductor model based on EE-type core and its implementation.
지(surge) 전압 발생으로 인한 잡음이 입력전원 및 피드 백 보상 회로로 유입되는 것을 방지하기 위하여 MOSFET 을 최대한 제어부와 분리하는 PCB layout을 적용하였다.
총 PCB 면적은 100 mm × 34 mm 크기로 저면적 설계가 실현되었다. Fig. 5의 PCB layout을 바탕으로 본격적인 성 능 측정을 위해 Fig. 6와 같이 시제품 전력변환 회로 및 시스템을 제작하였다.
4.1. Boost DC-DC Converter Operation
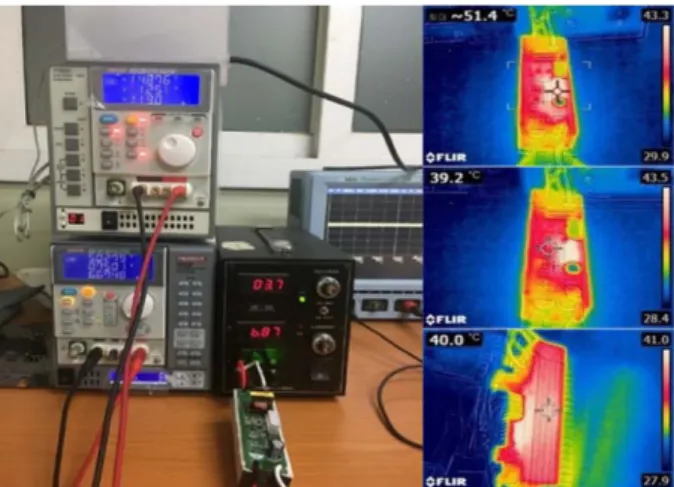
동작 검증 실험은 단일 배터리 셀 전압인 3.7V를 인가하 고, 출력전압은 드론의 디지털 시스템에 공급할 5V 전압을 설정하여 측정하였다. 실험 및 측정은 DC 파워전원, 부하
기, 그리고 오실로스코프를 세트로 구성하여 수행하였다.
Fig. 7은 출력부하 조건이 1A인 경우 부스트 컨버터의 동 작 파형을 나타내고 있다. 입력전압 약 3.7V에서 출력전 압은 DC 5V로 승압되는 것을 확인하여 정상적인 boost converter 동작을 볼 수 있다. MOFSET gate 스위칭 파형 은 159 kHz의 동작 주파수로 식(1)에서 계산한 바와 같이 26%의 duty ratio로 동작하고 있다. 이에 따라 인덕터 전 류는 on duty 때 충전되고, off duty 때 방전되는 정상적 인 스위칭 동작을 확인할 수 있다.
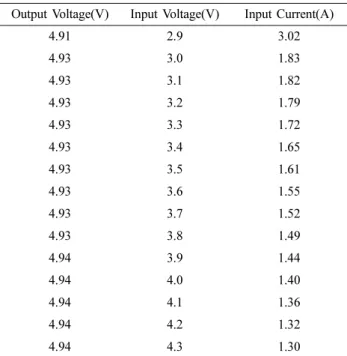
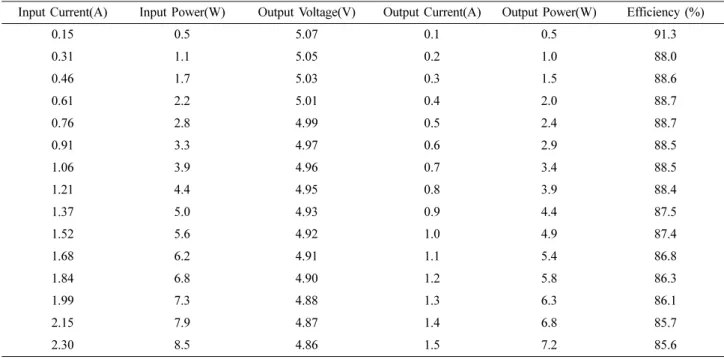
4.2. Line/Load Regulations and Power Efficiency 본 전력회로의 line regulation 성능을 평가하기 위해 출 력(부하)전류 1A 조건에서 입력전압을 배터리 전압의 변 동 범위인 2.9V에서 4.3V까지 0.1V 단위로 변화시키며 출력전압을 측정하였다. Table 3과 Fig. 8은 이에 대한 실 험 결과이며, 전 입력구간에 걸쳐서 line regulation은 0.02V/V로 측정되어 입력변화에 따른 출력전압 변동이 매우 작음을 알 수 있다. Table 4와 Fig. 9에서와 같이 3.7V 의 입력전압을 기준으로 부하 조건을 0.1A에서 1.5A까지 Fig. 5. PCB layout.
Fig. 6. Photograph of SMPS DC-DC boost converter sample.
Fig. 7. Operational waveforms of SMPS DC-DC boost converter.
Table 3. Measured line regulation.
Output Voltage(V) Input Voltage(V) Input Current(A)
4.91 2.9 3.02
4.93 3.0 1.83
4.93 3.1 1.82
4.93 3.2 1.79
4.93 3.3 1.72
4.93 3.4 1.65
4.93 3.5 1.61
4.93 3.6 1.55
4.93 3.7 1.52
4.93 3.8 1.49
4.94 3.9 1.44
4.94 4.0 1.40
4.94 4.1 1.36
4.94 4.2 1.32
4.94 4.3 1.30
0.1A 단위로 변동시키며 load regulation 성능을 평가하였 다. 그 결과 load regulation 0.15V/A의 우수한 성능을 확 인하였다.
Fig. 10는 본 전력변환회로의 효율을 측정한 결과이다.
0.15A 부하전류 상황에서 효율 91.3%, 2.3A 부하전류에 서는 효율 85.6%로 측정되었으며 평균적으로 88%의 효 율을 유지하며 동작하고 있다. 부하전류가 증가함에 따 라 비 이상적인 기생성분인 MOSFET 스위치의 RDS 저항 과 인덕터의 equivalent series resistance (ESR) 저항에 의 해 효율저하가 발생함을 확인할 수 있다.
4.3. Module Surface Temperature
상온에서 출력전압 5V, 출력전류 0.7A 조건으로 30분 간 동작 시킨 후 열화상 카메라를 사용하여 모듈 및 부품 의 표면온도를 측정하였다. Fig. 11을 보면 부분적으로 MOSFET의 발열이 51.4oC로 측정되었으나 모듈의 전체 온도는 평균적으로 50oC보다 낮게 측정되고 있다.11) 이
결과는 본 전력변환 회로가 높은 효율로 동작함을 증명 하고, 추후 드론의 발열 및 화재문제를 저감 시킬 수 있 을 것으로 기대된다.
Fig. 8. Measured line regulation result.
Table 4. Measured load regulation.
Input Current(A) Input Power(W) Output Voltage(V) Output Current(A) Output Power(W) Efficiency (%)
0.15 0.5 5.07 0.1 0.5 91.3
0.31 1.1 5.05 0.2 1.0 88.0
0.46 1.7 5.03 0.3 1.5 88.6
0.61 2.2 5.01 0.4 2.0 88.7
0.76 2.8 4.99 0.5 2.4 88.7
0.91 3.3 4.97 0.6 2.9 88.5
1.06 3.9 4.96 0.7 3.4 88.5
1.21 4.4 4.95 0.8 3.9 88.4
1.37 5.0 4.93 0.9 4.4 87.5
1.52 5.6 4.92 1.0 4.9 87.4
1.68 6.2 4.91 1.1 5.4 86.8
1.84 6.8 4.90 1.2 5.8 86.3
1.99 7.3 4.88 1.3 6.3 86.1
2.15 7.9 4.87 1.4 6.8 85.7
2.30 8.5 4.86 1.5 7.2 85.6
Fig. 9. Measured load regulation result.
Fig. 10. Measured power efficiency result.
5. Conclusion
종래의 드론은 다수의 Li-Po 배터리 셀을 직렬로 연결 하여 높은 전압으로 전력을 공급하였다. 이에 따라 cell- balancing 문제 및 linear regulator의 step-down 전력변환에 의한 50% 수준의 낮은 전력효율이 문제가 되었다. 본 논 문은 단일 배터리 셀을 사용할 수 있는 드론 전력공급회 로를 제안하였다. 제안하는 전력회로는 SMPS DC-DC 변 환 방식을 활용하여 최대 91%의 높은 전력효율을 달성 하였으며, 단일 배터리 셀로 인해 cell-balancing 문제로부 터 자유로울 수 있다. 따라서 본 연구를 통해 더욱 가벼 운 무게와 함께 높은 전력효율로 배터리 소모를 최소화 하여 드론의 체공시간을 획기적으로 증대 시킬 수 있을 것으로 기대된다.
Acknowledgements
This work (Grants No. C0443507) was supported by Business for Cooperative R&D between Industry, Academy,
and Research Institute funded Korea Small and Medium Business Administration in 2016.
References
1. D.-K. Kim, S.-Y. Wie, J.-R. Song, K.-W. Song, C.-J. Hwang, and G. Joo, “Technology Trend on the Statue of the Unmanned Mul- ticopter Development”, Current Industrial and Technological Trends in Aerospace, 13(2), 80 (2015).
2. M. Hassanalian, and A. Abdelkefi, “Classifications, applica- tions, and design challenges of drones: A review”, Progress in Aerospace Sciences, 91, 99 (2017).
3. K.-H. Nam, W.-J. Jung, J.-E. Jang, H.-I. Chae, and J.-S. Park,
“Wireless Power Harvesting Techniques to Improve Time to Fly of Drone”, The Journal of The Korean Institute of Com- munication Sciences, 41(11), 1574 (2016).
4. J. Leuchter, and A. F. Zobaa, “Batteries Investigations of Small Unmanned Aircraft Vehicles”, Proc. 8th IET Interna- tional Conference on Power Electronics, Machines and Drives (PEMD 2016), Glasgow, UK, 6, The Institution of Engineer- ing and Technology (IET) (2016).
5. J.-K. Shiau, D.-M. Ma, P.-Y. Yang, G.-F. Wang, and J. H.
Gong, “Design of a Solar Power Management System for an Experimental UAV”, IEEE Trans. Aerospace and Electronic System, 45(4), 1350 (2009).
6. D.-K. Kwak, “High Efficiency Power Conversion System of Non Isolated Type Applied in Fuel Cell Generator Used to Fire Prevention Installation”, J. Microelectron. Packag. Soc., 13(3), 19 (2006).
7. R. W. Erickson, and D. Maksimovic, “Fundamentals of Power Electronics”, 2nd Ed., 1, KLUWER ACADEMIC PUBLISH- ERS, New York (2001).
8. C. Sreekumar, and V. Agarwl, “A Hybrid Control Algorithm for Voltage Regulation in DC-DC Boost Converter”, IEEE Trans. Power Electron., 55(6), 2530 (2008).
9. “LM3488 datasheet”, Texas Instruments (2015) from http://
www.ti.com/lit/ds/symlink/lm3488.pdf
10. “PSMN1R2 datasheet”, Nexperia B.V. (2016) from https://
assets.nexperia.com/documents/data-sheet/PSMN1R2-25YL.
11. I.-W. Suh, H.-S. Jung, Y.-H. Lee, Y.-H. Kim, and S.-H. Choa,
“Heat Dissipation Technology of IGBT Module Package”, J.
Microelectron. Packag. Soc., 21(3), 7 (2014).
Fig. 11. Surface temperature of the boost converter using thermal imaging camera.