大 韓 土 木 學 會 論 文 集 第26卷 第4D 號·2006年 7月 pp. 687~693
測量 및 地形空間情報工學
사전검수영역기반정합법과 ‘t-분포 과대오차검출법’을 이용한 위성영상의 ‘자동 영상좌표 상호등록’
Automated Satellite Image Co-Registration using Pre-Qualified Area Matching and Studentized Outlier Detection
김종홍*·허 준**·손홍규***
Kim, Jong Hong
·
Heo, Joon·
Sohn, Hong Gyoo···
Abstract
Image co-registration is the process of overlaying two images of the same scene, one of which represents a reference image, while the other is geometrically transformed to the one. In order to improve efficiency and effectiveness of the co-registration approach, the author proposed a pre-qualified area matching algorithm which is composed of feature extraction with canny operator and area matching algorithm with cross correlation coefficient. For refining matching points, outlier detection using studentized residual was used and iteratively removes outliers at the level of three standard deviation. Throughout the pre-qual- ification and the refining processes, the computation time was significantly improved and the registration accuracy is enhanced.
A prototype of the proposed algorithm was implemented and the performance test of 3 Landsat images of Korea. showed: (1) average RMSE error of the approach was 0.435 pixel; (2) the average number of matching points was over 25,573; (3) the average processing time was 4.2 min per image with a regular workstation equipped with a 3 GHz Intel Pentium 4 CPU and 1 Gbytes Ram. The proposed approach achieved robustness, full automation, and time efficiency.
Keywords :
co-registration, canny edge detection, area-based matching, and studentized residual···
요 지
최근 전 지구적
,혹은 대규모 지역의 분석 및 모니터링을 위한 위성영상의 사용이 늘어나고 있으며 이를 처리하기 위해 빠르고 편리한
‘영상좌표 상호등록
’방법이 요구되고 있다
.이러한
‘영상좌표 상호등록
’은 위성의 센서모델 및 천체력 자료를
이용하는 엄밀 모델식을 이용하는 방법과 기 존재하는 기준 영상
(Reference image)을 사용하거나 혹은 수치지도를 사용하는
경험적 방법의 두 가지로 분류할 수 있다
. ‘영상좌표 상호등록
’의 효율성을 높이기 위해서 저자는
‘사전검수 영역기반정합법
’(Pre-qualified area matching)
을 사용하였다
.이는
Canny연산자를 이용한 경계추출법
,교차상관계수를 사용한 영역기반정 합법
(Area based matching), t-분포를 이용하여
95%의 신뢰구간 내에서 과대오차 소거법을 적용한 방법이다
.이러한 사전검
수
(Pre-qualification)과정을 통해 연산시간을 현저히 단축시켰고
, ‘영상좌표 상호등록
’의 정확도 역시 향상됨을 알 수 있었 다
.제안한 알고리즘을 사용하여 프로그램을 작성하고
,한반도
Landsat ETM+영상
3장을 이용하여 테스트하였다
.정합점 간의 평균제곱오차는
0.435영상소
,정합점은 평균
25,573개로 나타났다
.연산 시간은
3.0GHz 1Gb RAM사양의 컴퓨터 에서 평균 약
4.2분으로 나타났다
.핵심용어 : 영상좌표 상호등록
, Canny경계추출
,영역기반정합
, Studentized잔차
···
1. 서 론
1.1 연구배경
영상좌표 상호등록 (Image co-registration) 이란 관심 지역의
기준 영상에 새로 취득한 영상을 변환식을 이용하여 중첩시 키는 과정이다 . 이는 대상인식 , 영상모자이크 , 시간에 따른 변화관측 , 데이터 융합 등에서 널리 사용되는 기법이며 이를 위해서는 일정 수준 이상의 정확도를 만족해야 한다 . 또한
최근 대규모 지역 모니터링 등의 목적으로 위성영상의 사용 이 늘어나면서 빠른 ‘ 영상좌표 상호등록 ’ 방법이 필요한 상황 이다 . 위성영상을 사용하기 위해 가장 기초적인 과정은 영상 에 좌표를 등록하는 과정으로서 영상좌표 상호등록은 크게 : 1) 위성의 센서모델과 천체력 자료를 이용한 엄밀모델식을 이용하는 방법 , 2) 사용 가능한 기준 영상 (reference image)
을 이용하거나 수치지도를 이용하는 경험적 방법의 두 가지 로 분류할 수 있다 . 첫 번째 방법은 대부분 위성센서에 대
*연세대학교사회환경시스템공학부석사과정
(E-mail : [email protected])
**정회원·연세대학교사회환경시스템공학부조교수
(E-mail : [email protected])
***정회원·연세대학교사회환경시스템공학부부교수
(E-mail : [email protected])
해서 일반적으로 요구되는 정확도인 0.5 영상소를 확보할 수
없다는 단점이 있으며 , ETM 영상의 경우 평균제곱오차는
±250m, TM 영상의 경우는 이보다 더 나쁜 결과를 보인다 .
또한 최근 Landsat 7 ETM+ 영상은 SLC(Scan line
corrector)-off 로 인해 정상적인 영상을 취득할 수 없는 상황
이고 , SLC-off 영상의 보정을 위해 ‘ 영상좌표 상호등록 ’ 은
필수적 과정이며 이러한 이유로 인해 중요성이 부각되고 있 다 (Howard 등 , 2004; Maxwell 등 , 2004). 또한 ‘ 영상좌표 상호등록 ’ 은 엄청난 양의 계산 및 연산시간이 요구되는 과정 으로서 많은 시간과 노력이 필요하다 . 최근 컴퓨터의 비약적 발달로 처리시간이 많이 단축되었지만 더욱 빠르고 효과적 인 ‘ 영상좌표 상호등록 ’ 방법이 필요하다 .
NASA 는 1970 년대부터 Landsat MSS, TM 및 ETM+
영상을 이용 지구전역의 정사보정 영상 제작을 지원해왔고
(Tucker 등 2004), 현재 NASA GLCF(Global land characterization facility) 에서는 이렇게 제작된 정사영상을 무 료로 사용자에게 공급하고 있다 . 따라서 본 연구에서는
NASA GLCF 에서 무료로 제공하는 정사 보정 Landsat 영
상을 기준 영상으로 사용하는 빠르고 효과적인 ‘ 영상좌표 상
호등록 ’ 방법을 제안하고 한국의 Landsat 영상을 이용하여 테
스트를 실시하였다 .
1.2 기존 연구검토 및 동향
일반적으로 기준영상을 이용한 ‘ 영상좌표 상호등록 ’ 절차는 다음과 같다 .
(1) 기준영상으로부터 기준점을 취득한다 . (2) 취득된 영상으로부터 정합점을 추출한다 .
(3) 추출한 기준점과 정합점중에서 과대오차를 제거한다 . (4) 취득영상과 기준영상간의 Affine 변환계수를 추정한다 . (5) 추정된 Affine 변환을 이용 , 취득영상을 리샘플링 한다 .
‘ 영상좌표 상호등록 ’ 의 자동화 여부는 최초 3 단계에 따라
좌우되며 이를 다룬 많은 연구가 있었다 . 이미 Rignot 등
(1991) 은 ‘ 영상좌표 상호등록 ’ 자동화의 중요성을 자각하고 ,
이를 위해 필요한 조건 및 실제 처리방법을 제안하였고 ,
Ton 과 Jain(1989) 은 최초로 반자동으로 기준점을 선택하는
방법 및 Landsat-4 와 Landsat-5 영상을 자동으로 정합하는
방법을 제안했고 , Flusser 와 Suk(1994), Li 등 (1995), Dai 와
Khorram(1999), Habib 와 Al_Ruzouq(2005) 등은 영역기반
정합법 (area based matching) 보다 우수한 형상기반정합법
(feature based matching) 알고리즘을 제안했다 . 하지만 형상 기반정합법을 이용하는 경우 충분한 지상기준점의 수가 확 보되지 않으면 주관적인 결과를 얻을 수 있고 , 추출된 형상 들이 영상 전반에 걸쳐서 분포하지 않을 수도 있으므로 영 상등록시 오류가 발생할 가능성이 있다는 문제가 있었다
(Chen 등 , 2003). 또한 Kim 과 Im 은 영역기반정합법과 과대 오차검출 및 제거법을 포함한 ‘ 영상좌표 상호등록 ’ 알고리즘 을 제안하였다 (2003).
1.3 연구목적
지금까지 자동으로 ‘ 영상좌표 상호등록 ’ 의 구현하기 위한 다양한 연구가 있었다 . 하지만 이들 모두 임의의 조건에서 기존의 알고리즘이 가지고 있던 여러 문제를 해결하는 수준
에 그침으로써 일반적 해법을 제시하지 못했으며 ‘ 영상좌표 상호등록 ’ 처리 중 긴 처리시간이 소요되는 문제가 있었다 .
다시 말해 원격탐측분야에서는 아직도 1) 지표의 형상 및
특성과 무관하게 0.5 영상소 이내의 정확도 2) 완벽하게 자
동화된 , 즉 처리도중 사용자의 추가조작이 전혀 필요하지 않 고 3) 일반 컴퓨터 사양에서 비교적 짧은 소요 시간이 ( 약
10 여분 정도 ) 걸리는 ‘ 자동 영상좌표 상호등록 ’ 법을 가지고 있
지 않다고 할 수 있다 . 그러므로 본 연구의 목적은 위 3 가 지 요구사항을 만족하는 ‘ 영상좌표 상호등록 ’ 방법을 제시하는 데 있다고 할 수 있다 . Landsat-5 TM 과 Landsat-7 ETM+
영상을 사용하여 테스트를 실시하였으며 그 이유는 이들 두
종류 영상 모두 NASA GLCF 에서 정사 보정된 기준영상을
무료로 사용할 수 있으며 특히 Landsat-7 영상의 경우
SLC(Scan Line Corrector) 의 이상으로 인해서 정상적인 영
상을 취득 및 사용할 수 없다 . 이런 SLC-off 영상의 오류
를 수정하기 위해서 효과적인 ‘ 영상좌표 상호등록 ’ 은 필수적 인 과정이라고 할 수 있다 .
2. ‘자동 영상좌표 상호등록’ 알고리즘의 제안
2.1 ‘자동 영상좌표 상호등록’의 개요
위에서 언급한 3 가지 목적 ( 안정성 , 자동화 , 효율성 ) 을 만족 시키기 위해 , 저자는 아래와 같은 ‘ 영상좌표 상호등록 ’ 방법을 제안하고자 한다 . 그림 1 은 이를 나타낸 순서도이며 구체적 내용은 아래와 같다 .
1 단계 : 기준영상에 대해 취득영상을 초기화한다 . 2 단계 : 기준영상 내에서 기준점의 사전검수를 실시한다 . 3 단계 : 취득영상에서 정합점을 검색한다 .
4 단계 : 추출한 기준점에서 과대오차를 제거한다 . 5 단계 : 기준영상과 취득영상간의 매핑함수를 추정한다 . 6 단계 : 추정함수의 정확도를 확인하고 정확도를 만족하면 7
단계로 , 그렇지 못하면 4 단계로 돌아간다 .
7 단계 : 취득영상을 추정된 매핑함수를 이용해서 리샘플링한다 .
2.2 기준 영상 및 영상의 초기화
‘ 영상좌표 상호등록 ’ 은 절대 정확도보다 기준영상에 대한 대상영상의 상대 정확도가 더 중요시된다 . 본 연구에서 사용
한 ETM+ 영상의 경우 , 기준영상은 NASA GLCF 에서 다운
로드 받을 수 있으며 , 이들 모두 정사 보정된 영상으로서 상대 정확도 및 절대 정확도를 모두 만족시키는 영상이라고
할 수 있다 . 본 연구에서 수행한 ‘ 영상 초기화 ’(Initial
approximation) 란 대상영상을 기준영상에 수 영상소 이내로
일치시키는 과정으로 ‘ 영상좌표 상호등록 ’ 수행 전에 기준영 상과 대상영상을 사용자가 직접 확인하여 1~2 영상소 이내 로 일치하도록 한다 . 이러한 최초 영상간 상호등록 정확도는 탐색공간 (Searching space) 의 크기를 좌우하므로 ‘ 영상 초기 화 ’ 는 매우 중요한 부분이라고 할 수 있다 . 예를 들면 초기
정확도를 600m 로 설정하고 영역기반정합법을 적용하면 ,
30m 해상도의 TM 및 ETM+ 영상에 대하여 최소 41 × 41
영상소 크기의 윈도우를 이용하여 정합을 실시해야 한다 . 반
면 , 초기 정확도를 150m 로 설정하면 , 가능한 윈도우 크기가
11 × 11 영상소로 크게 줄어든다 . 따라서 후자의 경우 전자 에 비해 작업시간이 1/16 으로 줄어든다 . 따라서 이러한 영상 초기화는 ‘ 영상좌표 상호등록 ’ 의 효율성 확보하기 위한 중요 한 과정임을 알 수 있다 .
2.3 사전검수작업의 필요성
‘ 영상좌표 상호등록 ’ 전 과정에 걸쳐 가장 긴 시간이 소요
되는 것은 기준점 및 정합점을 검색하는 과정이다 . 기 제안 되었던 수많은 정합법 중에서 저자는 경계추출법과 영역기 반정합법이 혼합된 형태를 제안하고자 한다 . 이 방법은 경계 추출을 이용하여 사전검수에 소요되는 시간을 줄이고 , 신뢰 도는 높지만 시간이 많이 소요되는 영역기반정합법을 이용
하는 방법이다 . 예를 들어 11 × 11 영상소 크기를 검색공간
으로 사용하는 11 × 11 영역기반정합법을 100km×100km 크
기의 TM/ETM+ 영상에 적용하면 , 정합 자체에만 교차상관계
수 연산을 약 13 억 (11 × 11 × 3333 × 3333 = 13 억 ) 회 수행해 야 하며 교차상관계수식은 다음과 같다 .
여기서 R과 C는 면적기반정합을 수행하기 위한 검색창의 행 과 열의 크기이며 , R ( r , c ) 및 S ( r , c ) 는 기준영상과 취득영상 의 영상소 밝기값이다 . 또한 µ
R과 µ
S는 기준영상과 취득영상 검색창의 평균 밝기값을 나타낸다
또한 11×11 영역기반정합법은 식 자체에서만 972 번의 기
본연산이 필요하다 . 결과적으로 정합에만 1 조 2 천억 회의 연
산이 필요하며 , 21×21 영역기반정합법의 경우는 5 조 번의
연산이 필요하다 . 이는 현재 컴퓨터 성능에 비추어보더라도
이러한 수치는 컴퓨터에 큰 부담이 되며 , 필연적으로 연산시 간이 늘어나게 된다 . 따라서 이런 엄청난 연산회수를 줄이기 위해 본 연구에서는 영상 전체의 영상소를 이용하지 않고 경계를 추출하고 추출한 경계영상의 영상소만을 사용하는 사 전검수법을 사용하고자 한다 .
2.4 경계 추출 및 정합점 추출
‘ 영상좌표 상호등록 ’ 수행 시 영상 내에 분포하는 도로망과
같은 명확한 경계들은 정합점 추출을 위한 좋은 대상물로 사용할 수 있다 . 따라서 본 연구에서는 경계추출 알고리즘을 취득영상에 적용하여 이진경계지도 (Edge binary map) 를 작 성한 뒤 , 영역기반정합법을 해당 이진경계지도에만 적용하는 방법을 사용하였다 . 경계추출에는 안정적이고 , 노이즈의 영
향을 거의 받지 않으며 , 정확한 경계를 추출할 수 있는
Canny 연산자를 본 연구에 사용하였다 . Canny(1986) 연산
자는 다음과 같이 4 단계로 진행된다 .
1 단계 : 노이즈의 영향을 줄이기 위해 영상에 가우시안 필터
를 적용한다 .
2 단계 : 영상 밝기값 기울기 및 방향을 계산한다 .
3 단계 : 넓은 경계의 폭을 줄이고 큰 변화를 보이는 부분을
보존하기 위해서 밝기 값의 기울기에 nonmaxima
supression 을 적용한다 .
4 단계 : 경계추출 및 연결을 위해 이중 임계값 (Double
thresholding) 알고리즘을 적용한다 .
어떤 경계추출법을 이용하더라도 , 경계와 비경계를 구분하
는 임계값 (Threshold) 을 선정하는 것은 어려운 일이다 . 임계
값을 너무 높게 설정하면 , 너무 적은 경계가 추출되어 연산 속도는 빨라지지만 나쁜 결과를 얻는다 . 이와 반대로 너무 낮게 설정하면 위와 정반대의 현상이 나타난다 . 따라서 경계 추출시 적절한 경계값을 설정하는 것은 매우 중요한 과정임 을 알 수 있으며 , 이를 위해 본 연구에서는 밝기값 기울기 표준편차의 2 배 및 2.5 배의 값을 임계값으로 설정하여 그 범위에 포함되는 부분을 경계로 추출하였다 . 이를 통해 ‘ 영 상좌표 상호등록 ’ 수행 중 사용자의 추가 조작을 줄임으로써 영상등록 알고리즘의 완전 자동화를 구현할 수 있도록 하였 다 . 또한 ‘ 영상좌표 상호등록 ’ 과정은 경계추출연산자를 이용 해 추출된 경계영상에 따라 전체 과정의 속도 및 정확도가 결정되기 때문에 경계추출시 본 연구에서 사용한 통계적 접 근방법을 통해 임계값을 결정해야 한다 . 경계추출에 사용한 임계값의 크기가 정규분포를 따른다면 , 본 연구에서 사용한 표준편차의 2 배 및 2.5 배의 임계값은 이론적으로 전체 영상
에서 약 0.5~2.0% 의 영상소를 추출한다고 추정할 수 있으며 ,
테스트 결과 전체 영상소의 약 1.0% 해당하는 영상소만이
추출되었음을 확인할 수 있었다 . 이러한 사전검수과정를 통 해 영상등록에 소요되는 시간을 단축시켜 영상등록의 효율 성을 증가시킬 수 있다 . 사전검수과정을 통해 경계를 추출한
뒤 교차상관계수를 이용한 영역기반정합을 실시한다 . 탐색 윈도우 내 존재하는 점들 중 교차상관계수가 0.85 이상인 점을 정합점 후보로 선택하며 , 이를 이용하여 매핑함수를 추 정한다 .
2.5 매핑함수의 추정 및 과대오차 검출 및 제거
매핑함수의 추정이란 ‘ 영상좌표 상호등록 ’ 을 위한 수학적
모델을 선택하는 것으로 이러한 수학적 모델에는 Affine(1 차
식 ) 및 2 차식 등 다항식을 이용하는 방법과 센서모델을 이 용한 정사보정방법 등이 있다 . 본 연구에서는 영상등록 정확 도를 분명하게 확인할 수 있는 1 차 다항식을 이용하였다 .
일반적으로 Landsat 의 TM/ETM+ 이용하는 경우 정확도를 평가하는 방법은 정합점의 평균제곱근오차를 사용하는 것이 다 . 일반적으로 최초로 얻은 정합점들을 이용한 결과는 만족 할만한 정확도를 얻을 수 없다 . 따라서 정합점들 중에서 과 대오차를 제거하는 것은 ‘ 영상좌표 상호등록 ’ 의 정확도를 확 보하는데 중요한 과정임을 알 수 있다 .
ρ
R r c( ) µ, – R
( )
c 1=
∑C r 1=
∑R (S r c( ) µ, – S)
R r c( ) µ, – R
( )2
c 1=
∑C r 1=
∑R c 1∑=C (S r c( ) µ, – S)2
r 1=
∑R
---
=
R r c( )S r c, ( ) µ, – SR r c( ), –µRS r c( ), +µRµS
( )
c 1=
∑C r 1=
∑R
R r c( ), 2–2µRR r c( ), +µR2
( )
c 1=
∑C r 1=
∑R (S r c( ), 2–2µsS r c( ), +µs2)
c 1=
∑C r 1=
∑R
---
=
R r c( )S r c, ( ) RCµ, – RµS
c 1=
∑C r 1=
∑R
R r c( ), 2–RCµR2
c 1=
∑C r 1=
∑R S r c( ), 2–RCµs2
c 1=
∑C r 1=
∑R
---
=
본 연구에서 사용된 관측방정식은 다음과 같다 .
R
2P×1= S
2P×6• M
6×1+ ε
2P×1(1)
여기서 잔차 ε은 정규분포 N (0, Iσ
2) 를 따르며 , P는 정합점의 수 , I 는 2P×2P 크기의 단위행렬이다 . 또한 x,y 는 선형 변환
전의 좌표 , X 와 Y 는 변환후의 좌표 , 벡터 M 은 6 개 Affine
변환계수를 나타낸다 . 최소제곱법을 이용한 추정값 M 과 잔 차 ε는 다음과 같다 .
(2)
(3)
식 (1) 과 (2) 에 의해 i 번째 점의 잔차는 다음과 같은 분포 를 따름을 알 수 있다 .
(4)
여기서 h
ii는 ‘hat matrix’ 의 (i,i) 성분이다 . 다시 말하자면 잔차 e는 상수값이 아니라 행렬 S 의 성분으로 표현됨을 알 수 있다 . 이는 과대오차를 단순히 잔차의 크기만을 이용하여 제거할 수 없음을 의미한다 . 또한 n 번째 관측값과 k 값에 대
한 표준잔차 (Standardized residual) r
i는 다음과 같다 .
, ( 단 ) (5)
본 접근 방법은 통계적 의미를 가지기 때문에 신뢰도가 높은 방법이라고 할 수 있다 . Lund(1975) 는 이 표준잔차의
개략적인 분포를 계산했고 , Weisberg(1980) 는 이러한 표준잔
차를 t- 분포를 이용 studentized 잔차로 변환하는 다음과 같
은 간단한 변환식을 제안하였다 .
(6)
다시 말하면 과대오차를 제거하려면 단순히 잔차의 크기를 비교하는 것이 아니라 통계적으로 의미를 가지는 표준잔차
혹은 studentized 잔차를 이용하여 과대오차를 제거해야 함
을 알 수 있다 . 이 때 ‘ 영상좌표 상호등록 ’ 수행시 수천 ~ 수만
개의 정합점이 발생한다는 것을 고려한다면 t- 분포는 정규분 포를 따른다고 생각할 수 있고 , 이는 과대오차를 쉽게 제거 할 수 있음을 의미한다 . 여기서 h
ii는 영상 중심으로부터 정 합점까지 최단거리를 나타내며 영상의 외각으로 갈수록 커 지는 경향이 있다 . 다시 말하면 영상의 외각에 존재하는 정 합점의 경우 일반적인 방법으로는 과대오차로 판단되지만 ,
영상의 위치를 고려하는 본 과대오차 제거법을 사용한다면 영상 전체에 걸쳐서 정합점을 얻을 수 있다 . 다양한 정합점 분포가 정확한 ‘ 영상좌표 상호등록 ’ 의 중요 조건이라는 것을
감안하면 본 연구에서 제안한 방법이 매우 합리적이라고 할 수 있다 .
3. 실험 및 결과분석
3.1 테스트 영상 및 테스트 과정
본 연구에서 제안한 알고리즘을 3 개 영상 (p115r34,
p115r35, p115r36) 로 테스트하였다 . 해당 영상들은 연산시간
에 영향을 미칠 수 있는 요소인 지표 형상의 영향을 알아보 기 위해 다양한 지역의 영상 ( 중부내륙지방 (p115r35), 강원산
X1 Y1
.
X
.
pYp
x1y1
1 0 0 0 0 0 0
x1y11 . . . . . . . .
xpyp
1 0 0 0 0 0 0
xpyp1
m1 m2 m3 m4 m5 m6
ε
x1ε
y1. . ε
xnε
yn+
=
M
ˆ = (
STS)
–1STR e R R= – ' =
R SM– '
I S S
– (
TS)
–1ST( )
R=
I H
– ( )
R=
ei
∼
N( 0 1 , ( –
hii)σ
2)
ri ei s
1 –
hii---
=
s eTe n k– ---
=
ti ri n k
– – 1
n k
– –
ri2---
⎝ ⎠
⎛ ⎞
1 2/∼
t n k( – – 0 )
=
그림 1. 제안된 자동영상등록알고리즘의 절차
그림 2. p115r34_1999_10_29 ETM+ band1 영상
악지역 (p115r34) 및 남해안지역 (p115r36)) 을 사용하였으며 이 중 p115r35 및 p115r36 의 대상 영상은 SCL-off 영상이다 (
그림 1~ 그림 6). 사용한 영상의 제원은 표 2 와 같다 .
Affine 변환계수는 다음과 같은 과정을 통해 결정하였다 .
1) 검색공간으로 11×11 크기의 윈도우를 설정한다 .
2) 정합 윈도우 역시 11×11 로 설정한다 .
3) Canny 연산자의 임계값을 영상소 표준 편차값의 2.0
및 2.5 배로 설정 , 경계를 추출한다 .
4) 정합을 위한 최소 상관계수를 .85 로 설정한다 5) Affine 변환을 실시한다 .
6) Nearest neighbor 방법을 사용해서 리샘플링한다 ..
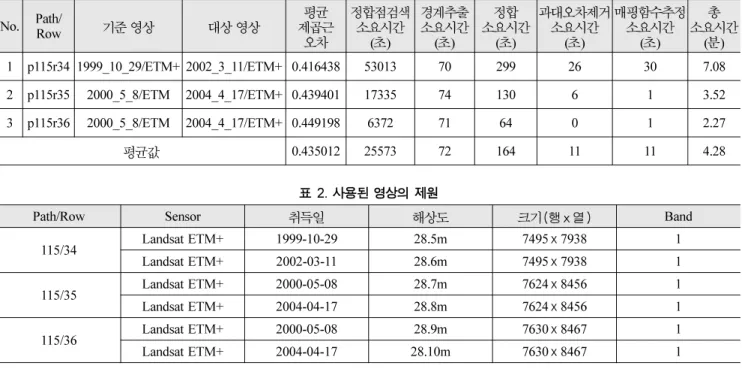
3.2 테스트 결과
테스트 결과는 표 1 과 같다 . 기준영상과 대상영상 모두
해상도가 28.5m 인 Landsat ETM+ 영상을 사용했고 , 최근
일반적으로 사용하는 P4 3.0GHz 1Gb RAM 시스템을 사 용했다 . 무엇보다 중요한 점은 본 연구에서 제안한 알고리즘 은 ‘ 영상좌표 상호등록 ’ 과정 중에 사용자가 일체의 추가 조 작을 하지 않았다는 점이다 . 또한 정합점의 평균제곱오차는
0.43 영상소로서 이는 모든 Landsat TM/ETM+ 영상에서
사용할 수 있는 수준의 정확도를 확보했다고 할 수 있다 .
그림 3. p115r34_2002_3_11 ETM+ band 1 영상
그림 4. p115r35_2000_5_8 ETM+ band 1 영상
그림 5. p115r35_2004_4_17 ETM+ band 1 영상
그림 6. p115r36_2000_5_8 ETM+ band 1 영상
그림 7. p115r37_2004_4_17 ETM+ band 1 영상
연산시간은 평균 약 4.28 분이 소요되었으며 , 영상에 따라 변
화가 심하긴 했지만 평균 25573 개의 정합점이 추출되었다 .
최장 소요시간은 p115r34 영상으로 7.08 분이었고 , 최단 연산 시간은 p115r36 영상으로 2.27 분이었다 . P115r34 영상의 경우 대전을 포함한 중부지방을 포함하는 영상으로 가장 많은 정 합점이 검출되면서 긴 연산시간이 소요되었다 . p115r35 영상
은 p115r34 와 마찬가지로 내륙지역 영상이지만 SCL-off 영
상을 대상영상으로 사용했기 때문에 상대적으로 적은 정합 점이 추출되었다 . 또한 p115r36 은 남해안 지역 영상으로 해 안 지역이므로 정합점이 영상의 좌측 상단에 집중해서 분포 하는 경향을 보였으며 정합점의 수가 현저히 적게 나타났고
이로 인해 2.27 분이라는 짧은 연산시간이 소요되었다 .
4. 결론 및 향후 과제
본 연구에서 저자는 ‘ 자동 영상좌표 상호등록 ’ 알고리즘을 제안하였고 , 시험프로그램을 작성하였다 . 본 연구의 목적은
지표의 형상과 무관하게 0.5 영상소 이내의 정확도를 가지는
빠르고 정확한 전자동 영상등록 알고리즘을 제안하는데 있
었고 , 이를 위해 Canny 연산자와 영역기반정합법을 사용하여
정합점을 추출하였고 t- 테스트를 이용하여 과대오차를 제거 하였다 . 다양한 지역의 Landsat-5 및 Landsat-7 영상을 이 용하여 테스트를 실시하고 , 정합점간 평균제곱오차는 0.43 영 상소 , 소요시간은 평균 2.27 분으로 나타났다 . 영상이 포함하
는 지형 특성에 따라 연산시간의 편차는 있었지만 제안한 알고리즘은 위의 연구목적에 부합함을 확인할 수 있었다 .
향후 연구과제는 다음과 같다 . 첫째로 제안한 알고리즘을
한국지역 Landsat ETM+ 영상 3 장으로만 실험을 실시하였
으므로 다른 지역의 영상 다수를 확보하여 실험을 실시하고
결과를 비교 , 분석해야 할 것이다 . 또한 Landsat 외의 다른
위성영상을 이용한 결과를 확인하고 , 결과가 만족스럽지 않 은 경우 다양한 센서에 적용할 수 있도록 알고리즘을 수정 해야 할 것이다 . 또한 개발된 프로그램은 선형매핑함수을 사
용할 수 밖에 없다는 한계가 있으므로 공선조건식이나 RPC
와 같은 비선형매핑함수에 대해서도 적용할 수 있도록 연구 가 지속되어야 할 것이다 . 또한 Canny 연산자가 가장 일반적 으로 사용되는 경계추출연산자이긴 하지만 일반적 연산자라 고 하더라도 이를 이용한 ‘ 영상좌표 상호등록 ’ 시 최적의 결과
를 보장하지는 않으므로 다른 경계추출연산자들을 이용해서 같은 방법으로 정확도 및 효율성을 검증해야 할 것이다 .
참고문헌
Canny, J.F. (1986) “A computational approach to edge detection”
IEEE Trans. on Pattern Analysis and Machine Intelligence, Vol. 8, pp. 679-698.
Chen, H. M., Arora, M. K., and Varshney, P.K. (2003) “Mutual Information-Based Image Registration for Remote Sensing Data”, International Journal of Remote Sensing, Vol. 24, No.
18, pp. 3701-3706.
Dai, X. and Khorram, S. (1998) “A Hierarchical Methodology Framework for Multisource Data Fusion in Vegetation Classifi- cation”, International Journal of Remote Sensing, Vol. 19, No.
18, pp. 3697-3701.
Flusser, J. and Suk, T. (1994) “A Moment-Based Approach to Reg- istration of Images with Affine Geometric Distortion”, IEEE Trans. on Geoscience and Remote Sensing, Vol. 32, No. 2, pp.
382-387.
Howard, S.M. and Lacasse, J. (2004) “An Evaluation of Gap-Filled Landsat SLC-Off Imagery for Wildland Fire Burn Severity Mapping”, Photogrammetric Engineering and Remote Sens- ing, Vol. 70, No. 8, pp. 877-880.
Kim, T. and Im, Y. (2003) “Automatic Satellite Image Registration by Combination of Matching and Random Sample Consen- sus”, IEEE Trans. on Geoscience and Remote Sensing, Vol. 41, No. 5, pp. 1111-1117.
Lund, R.E. (1975) Tables for an Approximate Test for Outliers in Linear Models, Technometrics, Vol. 17, No. 4, pp. 473-476.
Maxwell, S. (2004) “Filling Landsat ETM+ SLC-off Gaps Using a Segmentation Model Approach”, Photogrammetric Engineer- ing and Remote Sensing, Vol. 70, No. 10, pp. 1109-1111.
Rignot, E., Kowk, R., Curlander, J. C., and Pang, S. S. (1991)
표 1. 제안된 알고리즘의 테스트 결과
No. Path/Row
기준 영상 대상 영상 제곱근 평균 오차 정합점검색 소요시간
(초
)경계추출 소요시간
(
초
)소요시간 정합
(
초
)과대오차제거 소요시간
(초
)매핑함수추정 소요시간
(초
)소요시간 총
(
분
)1 p115r34 1999_10_29/ETM+ 2002_3_11/ETM+ 0.416438 53013 70 299 26 30 7.08
2 p115r35 2000_5_8/ETM 2004_4_17/ETM+ 0.439401 17335 74 130 6 1 3.52
3 p115r36 2000_5_8/ETM 2004_4_17/ETM+ 0.449198 6372 71 64 0 1 2.27
평균값
0.435012 25573 72 164 11 11 4.28표 2. 사용된 영상의 제원
Path/Row Sensor
취득일 해상도 크기(행ⅹ열)
Band115/34 Landsat ETM+ 1999-10-29 28.5m 7495
ⅹ
7938 1Landsat ETM+ 2002-03-11 28.6m 7495
ⅹ
7938 1115/35 Landsat ETM+ 2000-05-08 28.7m 7624
ⅹ
8456 1Landsat ETM+ 2004-04-17 28.8m 7624
ⅹ
8456 1115/36 Landsat ETM+ 2000-05-08 28.9m 7630
ⅹ
8467 1Landsat ETM+ 2004-04-17 28.10m 7630
ⅹ
8467 1“Automated Multisensor Registration: Requirements and Tech- niques”, Photogrammetric Engineering and Remote Sensing, Vol. 57, No. 8, pp.1029-1038.
Ton, J. and Jain, A.K. (1989) “Registering Landsat Images By Point Matching”, IEEE Trans. on Geoscience and Remote Sensing, Vol. 27, No. 5, pp. 642-651.
Tucker, C.J., Grant, D.M., and Dykstra, J.D. (2004) “NASA’s Glo- bal Orthorectified Landsat Data Set”, Photogrammetric Engi- neering and Remote Sensing, Vol. 70, No. 3, pp.313-322.
Weisburg, S. (1980) Applied Linear Regression, John Wiley, New York.
(