적외선 거리 센서를 사용한 충돌 경보기 설계 및 특성 분석
Design and Analysis of Collision Alarm Using Infrared Distance Sensor
김 병호† Byoung-Ho Kim
경성대학교 메카트로닉스공학과 생체모방, 로봇 및 웰니스 연구실
Biomimetics, Robotics and Wellness Lab., Dept. of Mechatronics Eng., Kyungsung University
요 약
본 논문에서는 근접거리측정이 가능한 적외선 거리 센서를 사용하여 다양한 물체 및 로봇과 이동 로봇 메커 니즘간의 충돌 위험성을 확인할 수 있는 충돌 경보기를 제시하고, 이 경보기의 효과적인 산업 응용을 위하여 중요한 신호의 생성 과정 및 동작 특성을 분석하고자 한다. 이를 위하여 제시된 충돌 경보기를 탑재한 이동 로봇 시스템이 전형적인 주차 동작을 수행하는 상황을 고려한다. 결과적으로, 제시된 충돌 경보기는 다양한 이동 로봇이나 차량 메커니즘의 충돌 회피및 안전 운행을 위하여 유용하게 활용될 수 있음을 보인다.
키워드 : 충돌 경보기, 적외선 거리 센서, 이동 로봇, 차량
Abstract
This paper specifies a collision alarm using an infrared distance sensor that can identify the dangerousness of collision of active mobile robotic systems to various objects, such as unknown objects or another robots. And we analyse the major operating signals and features of the collision alarm for effective industrial applications. For the purpose, we consider a typical parking situation of a mobile robotic system with the collision alarm designed. As a result, it is shown that the proposed collision alarm is applicable for effective collision avoidance and safe driving of various mobile robots or vehicles.
Key Words: Collision alarm, Infrared distance sensor, Mobile robots, Vehicles
1. 서 론
산업현장이나 다양한 작업영역에서의 인간 보조 작 업 등을 위하여 지능적으로 활동이 가능한 이동 로봇 플랫폼개발에 관한 연구가 활발하게 진행되고 있다 [1, 2]. 그림 1에 나타낸 것과 같은 로봇 플랫폼은 부가적인
접수일자 : 2014년 9월 14일 심사(수정)일자 : 2014년 9월 28일 게재확정일자 : 2014년 11월 10일
†
Corresponding author
본 논문은 본 학회 2014년도 추계학술대회에서 선정된 우수 논문입 니다. 이 논문은 2014학년도 경성대학교 학술연구비 지원에 의하여 연구되었음.
This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License (http://creativecommons.org/licenses/by-nc/3.0) which permits un- restricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
도구 장착에 의하여 실내외 환경에서 다양한 물체의 검 출이나 파지및 조작 등의 작업에 활용될 수 있다.
만일, 요구되는 일이 한대의 로봇으로 수행하기에는 쉽지 않거나 시간이 많이 소요되는 경우에는 여러 대 의 로봇이 협력적으로 사용될 필요가 있다. 예를 들어, 넓은 전시 공간이나 공항의 출입국 장소 등은 많은 사 람들이 장시간 사용하기 때문에 상시적인 청소 작업이 요구된다. 이를 해결하기 위해서는 다수의 청소부나 여 러 대의 청소 로봇을 투입할 필요가 있다. 이러한 상황 에서 로봇 시스템간의 충돌, 로봇과 사람 또는 작업 환 경내에 존재하는 다양한 물체와의 충돌을 안전하게 극 복하는 것은 주어진 일을 원활하게 수행하는데 있어서 매우 중요한 과제이다.
특히, 다중 로봇 시스템의 활용 관점에서 보면, 여러 대의 이동 로봇 메커니즘에게 주어진 경로가 겹치는 경우에 충돌이 발생하게 되는데, 원활한 업무 수행을 위해서는 상호간의 접촉을 회피하기 위한 알고리즘이 요구된다 [3, 4]. 이러한 문제와 관련하여, 충돌 위험성
(dangerousness of collision) [4], 상호 시스템간의 속도를 조절하는 방법 [5], 충돌 회피 가능도(avoidability mea- sure) 및 가상 거리(virtual distance) [6] 등의 개념은 실시 간 이동 장애물간의 충돌회피 경로 계획을 수립하는데 유용하게 활용될 수 있다. 그런데 이러한 알고리즘이 실시간으로 구현되기 위해서는 이동하고 있는 상호 시 스템간의 위치 정보가 사전에 빠르게 공유되어야 한다.
(a) Pioneer 3-DX [1] (b) STAR-1 [2]
그림 1. 이동 로봇 플랫폼
Fig. 1. Mobile robotic platforms실질적으로, 로봇이 임의로 놓여 있는 정적인 물체 또는 동적으로 나타나는 물체와의 충돌을 회피하기 위 한 사전 조치는 로봇과 외부 환경적 요인들의 안전성 을 확보하기 위하여 매우 중요하다. 그럼에도 불구하 고, 이러한 이동 로봇의 안전성 확보를 위한 알고리즘 을개발하는데 있어서 기본적으로 요구되는 두 매개체 간의 충돌 가능성 판단이나 예상되는 충돌 거리를 사 전에 제공하기 위한 연구는 깊이있게 다루어지지 않은 실정이다.
본 논문에서는 적외선 거리 센서를 기반으로 하여 이 동 로봇 메커니즘과 다른 물체간의 충돌 가능성이나 안 전 거리를 사전에 확인할 수 있는 충돌 경보기를 제시 하고, 동작 특성을 분석하고자 한다. 결과적으로, 제시 된충돌경보기는 다양한 이동 로봇이나 차량 메커니 즘의 충돌 회피및 안전 운행을 위한 경로 계획 [7] 및 제어 등에 유용하게 활용될 수 있음을 보이고자 한다.
이것은 인간이 직접 운전하는 차량의 경우에도 적용될 수 있다.
2. 이동 로봇을 위한 충돌 경보기 설계
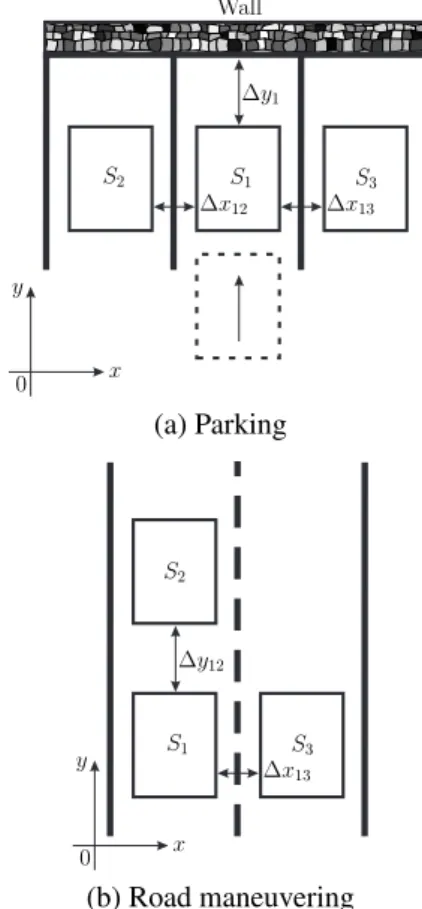
본 장에서는 이동 로봇 시스템의 충돌 상황에 대처하 기 위한 충돌 경보기를 설계하기 위하여 그림 2과 같은 충돌 회피기동 상황을 고려한다.
그림 2(a)는 이동 로봇(또는 차량) 시스템 S2와 S3가 먼저 주차되어 있는 상황에서 S1이 추가적으로 주차를 시도하는 상황을 나타낸다. 결국, 안전한 주차가 이루 어지려면, 벽과의 거리 ∆y1과 이웃하는 시스템간의 거 리 ∆x12와 ∆x13가 안전한 범위내에서 만족되어야 한 다. 그림 2(b)는 세 대의 이동 시스템이 동시에 도로 주 행을 하고 있는 상황을 나타내는데, 시스템 S1과 S2간 에 충돌이 발생하지 않으려면, 기본적으로 적절한 앞뒤 거리 ∆y12를 유지할 필요가 있고, 시스템 S1과 S3간에 는 적절한 측면거리 ∆x13를 유지하여야 불필요한 접 촉을방지할 수 있다. 이러한 목적을 위하여 본 장에서 는 상호 시스템간의 충돌 거리를 감지하여 로봇(또는
사용자)에게 알려줄 수 있는 충돌 경보기를 설계하고 자 한다.
(a) Parking
(b) Road maneuvering
그림 2. 다중 이동 로봇의 충돌 회피 기동을 위한 기본 조건
Fig. 2. Fundamental constraints for collision free maneu- vering of multiple mobile robotic mechanisms2.1 충돌 경보기 블록 다이어그램
그림 2에 제시된 바와 같이, 이동 로봇(또는 차량)이 장애물(또는 다른 시스템)과의 충돌을 예측하여 회피 조치에 활용하기 위하여 본 논문에서는 청각 및 시각 적인 경고 메시지를 고려하였다. 즉, 청각적인 관점에 서는 충돌거리가 가까워질수록 경보음의 크기가 점진 적으로 커지도록 하여 로봇(또는 운전자)으로 하여금 충돌 위험성을 인식할 수 있도록 하고, 또 한편으로 충 돌예상 거리를 표시해 줌으로써 보다 구체적인 충돌 가능성을 확인시킴으로써, 안전한 거리에서 제동이 가 해질 수 있도록 하는 두가지 개념에 근거하여 충돌 경 보기를 구상하였다.
그림 3은 본 논문에서 구상한 충돌 경보기의 블록 다 이어그램을 나타낸다. 여기서, 센서는 이동 메커니즘과 외부 환경에서 동작하고 있는 다른 시스템 또는 장애 물간의 충돌을 감지하기 위하여 적외선(infrared)을 발 사및 감지하고, 신호처리기(signal processor)는 센서 신 호를 아날로그 신호로 조정해 주는 역할을 하며, 증폭 기를 거친 신호는 경보기(alarm)를 통하여 경보 신호를 생성함과 동시에 A/D(Analog/Digital) 변환을 통하여 디 지털(digital) 거리값으로 표시될 수 있도록 설계하였다.
결과적으로, 제안된 충돌 경보기를 사용하게 되면, 충 돌 거리가 근접함에 따른 청각적인 경고가 가능하고, 구체적인 충돌 예상 거리를 확인할 수 있다.
그림 3. 충돌 경보기 블록 다이어그램
Fig. 3. Block diagram of a collision alarm2.2 적외선 거리 센서의 물리적인 특성
구상한 충돌경보기를 구현하기 위하여 센서의 선택 은 매우 중요하다. 본 논문에서는 구조적으로 복잡하지 않으면서 신호처리 기능이 포함되어 있어서 근접거리 측정이 용이한 적외선 거리 센서(infrared distance sen- sor), GP2Y0A21YK [8]를 사용하며, 이 센서의 주요 특 성은 표 1과 같다.
표 1. 적외선 거리 센서의 특성 파라미터
Table 1. Characteristic parameters of the infrared distance sensor
No. Feature Specification 1 Distance range 10∼80 cm
for effective measuring
2 Analog output type -
3 Package size 29.5×13×13.5 mm 4 Consumption current Typically 30 mA 5 Supply voltage 4.5∼5.5 V 그림 4는 사용된 적외선 거리 센서의 특성 곡선을 나 타낸다 [8]. 그림 3에서 볼 수 있듯이, 적외선 센서에는 적외선을 방사하는 광전소자(LED, Light Emitting De- vice)가 있고, 물체로부터 반사되어 돌아오는 신호를 감 지하는 위치감지소자(PSD, Position Sensitive Device)가 있다. 감지된 신호는 센서신호처리기에 의해 아날로그 전압으로 출력된다. 결국, 이 센서를 이용할 경우, 로 봇시스템과 물체간의 거리가 약 80 cm 이내에 근접하 게 되면, 충돌 예상 신호의 감지가 가능하고, 약 10 cm 에서 80 cm 범위내에서 의미있는 동작점이 존재함을 확인할 수 있다. 또한 근접 거리에 따라 출력 신호의 크 기가 점진적으로 커지는 특성을 보이고 있으므로 충돌 경보 메시지를 생성하는데 있어서 매우 효과적이라고 볼 수 있다. 추가적으로, Sharp사의 GP2Y0A60 등 계열 의 센서를 사용하면, 충돌 감지 거리는 보다 더 확장될 수 있다.
(a) Infrared distance sensor, GP2Y0A21YK
(b) Analog output voltage vs. reflective distance
그림 4. 적외선 거리 센서의 기본 특성
Fig. 4. Fundamental feature of the infrared distance sensor
2.3 충돌 경보 및 거리 표시 회로 설계
그림 4에 제시한 적외선 센서를 장착한 이동 로봇이 주행하는 동안에 어떤 물체와의 충돌이 예상되는 상황 에서 충돌 거리가 근접함에 따른 청각적인 경고와 충돌 예상 거리를 표시하기 위하여 버저(buzzer)와 7세그먼 트(segment)를 사용하였으며, 그림 3에 나타낸 블록 다 이어그램을 근거로 비교적 간단한 회로를 구상하였다.
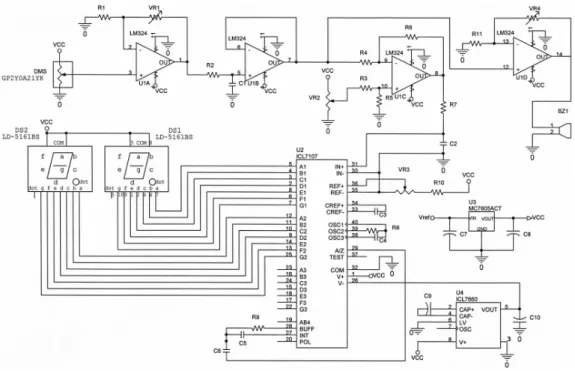
결과적으로, 제안된 충돌 경보 시스템의 회로도는 그 림 5와 같고, 전반적인 회로의 동작은 다음과 같다. 그 림 5에서 DMS(Distance Measuring Sensor)로 표시된 블 록은 센서부로서 로봇과 장애물간의 거리를 측정하기 위한 신호를 내보내거나 받아들인다. U1A 블록은 센서 출력을 증폭하기 위한 회로이고, U1B 블록은 LPF(Low Pass Filter)이며, 센서 신호의 노이즈를 줄이는 역할을 한다. U1C 블록은 차동 증폭에 의해 U2 블록(A/D 변 환기)의 입력 신호 레벨을 맞추어 주기 위함이다. 즉, 이 부분은 사용한 거리 센서의 특성상 거리가 멀어짐에 따라 신호의 크기가 작아지는 현상을 커지는 방향으로 전환함으로써 로봇과 장애물간의 거리를 표시하는데 있어서 조정 역할을 한다. 또한 가변저항 VR3는 센서 신호에 따른 A/D 변환기의 동작을 조정하는 역할을 한 다. 아울러, U3와 U4 블록은 각각 +5 V, -5 V 를 공급 하기 위한 전원 회로이며, U1D 블록에 의해 경보음의 크기를 조절하는 것이 가능하다.
3. 충돌 경보기 특성 실험
제안된 충돌 경보기의 효용성을 확인하기 위하여 본
그림 5. 제안된 충돌 경보 시스템의 회로도
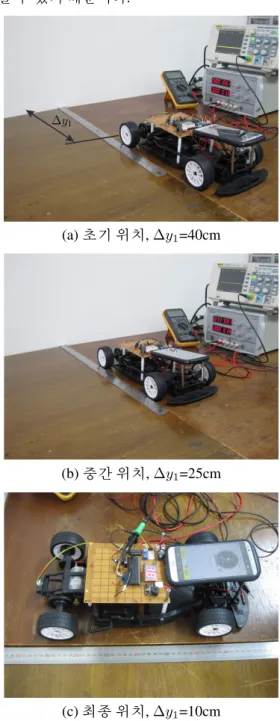
Fig. 5. Circuit of the proposed collision alarm system논문에서는 그림 2(a)에 나타낸 것과 같은 주차 상황을 대상으로 충돌경보기의 동작 실험을 수행하였다. 실험 에 이용된 로봇 메커니즘은 그림 6에서 보는 바와 같이, 제안된 충돌 경보기가 장착되어 있고, 이 로봇의 뒷부 분중앙에 2.3절에서 기술한 적외선 거리 센서가 있다.
실험 목표는 로봇이 주차를 위하여 어떤 구역에 후방 으로 진입할 때, 시멘트 벽(wall)과의 충돌을 예방하기 위한경고 신호와 충돌 예상 거리를 확인함으로써 제 안된 충돌 경보기의 동작 특성을 확인하고, 궁극적인 활용 가능성을 입증하는 것이다. 이를 위하여 로봇의 구동은 수동 및 원격제어에 의해 가능하나, 효과적인 실험 수행을 위하여 수동 모드를 사용하였다.
그림 6. 실험에 이용된 이동 로봇 메커니즘
Fig. 6. Mobile robotic mechanism for experiments 그림 7에서 보는 바와 같이, 실험은 로봇을 초기 위치 (벽과의 거리, 40cm)로부터 각각 5cm 씩 후진시키면서경고 신호음의 크기와 충돌 예상 거리를 확인하였다.
여기서, 경고음의 크기는 버저(Model No. CAP1205SL) 와 약 6cm 떨어진 곳에서 스마트폰 앱으로 제공되는 소음 측정기(sound meter) [9]를 사용하여 측정하였다.
특히, 그림 7(c)에서는 이동 로봇의 최종 주차 위치로 써, 로봇과 시멘트 벽간의 거리가 약 10cm 까지 접근한 경우이며, 이때 충돌 예상 거리 및 경보음의 크기를 확 인할 수 있다. 그림 8은 이러한 주차 상황에서 확인된 거리 센서의 출력 신호를 나타내며, 그림 4에 제시한 것(data sheet)과 유사한 패턴으로 동작함을 확인할 수 있다. 또한 로봇이 벽에 가까이 접근함에 따른 경보기 의 입력 전압 신호는 그림 9에 나타내었다. 실제로 이 전압의 레벨이 높으면 경보음의 크기가 커지게 되고, 거리에 따라 측정한 경보음의 크기는 그림 10과 같이 확인되었다.
한편, 이동 로봇의 주행중에 충돌 거리를 확인하기 위하여 다양한 초음파 센서가 이용될 수 있다 [10]. 이 경우에는 음파를 발신하여 매개체로부터 반향되어 돌 아오는 음파까지의 시간차로 거리를 계산해 내기 때문 에 기본적으로 그림 10과 같은 근거리 위험성 경고 효 과는 나타나지 않는다.
결과적으로, 실험 과정을 통하여 확인한 충돌 예상 거리 및 경보음 신호들의 동향은 그림 4와 그림 8에 나 타낸적외선 거리 센서의 특성에 따른 자연스러운 결 과이며, 이동 로봇의 충돌 위험성을 판단하는 근거로 서 유용하게 활용할 수 있다. 왜냐하면, 제안된 경보기 는 로봇과 장애물간의 거리가 짧아질수록 점진적으로 더 큰경고음을 발생시켜 충돌 위험성을 사용자에게 알 려줄 수 있을뿐만 아니라 구체적인 충돌 예상 거리도
제공할 수 있기 때문이다.
(a) 초기 위치, ∆y1=40cm
(b) 중간 위치, ∆y1=25cm
(c) 최종 위치, ∆y1=10cm
그림 7. 벽과의 거리에 따른 이동 로봇의 주차 위치
Fig. 7. Parking position of the mobile robot according to the distance between the sensor and the wall4. 검토 및 활용
본 논문에서 제시된 충돌 경보기는 이동 로봇 또는 차량이 주행중에발생될 수 있는 충돌 상황에 대한 판 단을 할 수 있도록경고음과 충돌 예상 거리를 제공하 기 때문에 단일 시스템 뿐만 아니라 그림 2(b)에서 보는 것과 같이, 상호 간섭이 필수적으로 동반되는 다수의 이동 메커니즘의운전 상황에서 전후방이나 측면 충돌
을 사전에예방하는데 의미있게 활용될 수 있다.
그림 8. 이동 로봇의 주차 상황에서의 거리 센서 출력 신호
Fig. 8. Output signal of the distance sensor during the mo- bile robotic parking그림 9. 이동 로봇의 주차 상황별 경보기의 입력 신호
Fig. 9. Input signal of the alarm according to the parking distance of the mobile robot그림 10. 벽과의 거리에 따른 경보기의 경보음 크기
Fig. 10. Sound level of the alarm according to the distance실제로, 사람이 운전하는 자동차의 경우를 살펴보면, 운전석에서 잘 보이지 않는 전후방 및 좌우측면에서 갑 자기 다가오는 이동 물체와의 충돌은 매우 치명적인 사 고로 이어지는 경우가 많다. 제안된 충돌 경보기는 이 러한 상황에서의 충돌 위험성을 사전에 확인할 수 있 는경보 장치로서 이동 로봇이나 차량의 보다 안전한
주행에 있어서 보조적인 수단으로 이용될 수 있다. 또 한 인간형 로봇 [11, 12]이나 다족 로봇 [13, 14]의 보다 안전한 보행을 위해서도 활용될 수 있다.
5. 결 론
본 논문에서는 이동 로봇이나 차량의 안전한 주행을 위하여 적외선 거리 센서를 기반으로 한 충돌 경보기를 제시하였고, 실험을 통하여 제시된 충돌 경보기의 동작 특성과 유용성을 확인하였다. 제시된 충돌 경보기는 로 봇과 장애물간의 거리 정보와 경보음을 통하여 충돌 가 능성을 판단하는데, 로봇과 장애물간의 거리가 짧아질 수록 점진적으로 더 큰 경고음을 발생시킴으로써 충돌 위험성을 사용자에게 효과적으로 알려줄 수 있는 특징 이 있다. 결과적으로, 이러한 충돌 경보기는 이동 로봇 또는 차량의보다 안전한 주차 및 주행을 위하여 유용 하게 활용될 수 있다. 특히, 다중 로봇 시스템에 활용될 경우, 로봇간의 안전거리 확보뿐만 아니라 로봇과 장 애물간의 충돌 회피에도 기여할 수 있을 것으로 판단 된다.
추가적으로, 다양한 위치에 여러 개의 충돌 경보기 를 장착할경우, 효과적인 경보 신호의 합성 및 충돌 위 험성의 판단에 대한 연구가 필요하다. 아울러, 이러한 경보기를 활용한 다중 로봇 메커니즘의 충돌 회피 및 경로 제어 문제로의 응용이 기대된다.
References
[1] http://www.mobilerobots.com, Adept Technology Inc..
[2] http://www.samsungtechwin.com, Samsung Techwin Co..
[3] M. J. Mataric, “Minimizing complexity in control- ling a collection of mobile robots,” Proc. of IEEE Int. Conf. on Robotics and Automation, pp. 830-835, 1992.
[4] A. Fujimori, M. Teramoto, P. N. Nikiforuk, and M. M. Gupta, “Cooperative collision avoidance be- tween multiple mobile robots,” Jour. of Robotic Sys- tems, vol. 17, no. 7, pp. 347-363, 2000.
[5] K. J. Kyriakopoulost and G. N. Saridist, “An inte- grated collision prediction and avoidance scheme for mobile robots in non-stationary environments,” Proc.
of IEEE Int. Conf. on Robotics and Automation, pp.
194-199, 1992.
[6] N. Y. Ko and B. H. Lee, “Moving obstacle avoidance of a robot using avoidability measure,” Jour. of Con- trol, Automation and Systems Engineering, vol. 3, no.
2, pp. 169-178, 1997.
[7] S.-H. Ha, I.-C. Choe, H.-S. Kim, and H.-T. Jeon,
“Collision-avoidance and optimal path planning of autonomous mobile robot using soft-computing,”
Jour. of Korean Institute of Intelligent Systems, vol.
20, no. 2, pp. 195-201, 2010.
[8] http://www.sharp-world.com/products/device/catalog, Sharp Co..
[9] https://play.google.com/store/apps, Smart Tools Co..
[10] D.-J. Seo, S.-W. Noh and N.-Y. Ko, “Moving object following control for differential drive robot based on two distance sensors,” Journal of The Korea Institute of Electronic Communication Sciences, vol. 6, no. 5, pp. 765-773, 2011.
[11] Y. Sakagami, R. Watanabe, C. Aoyama, S. Mat- sunaga, N. Higaki, and K, Fujimura, “The intelligent ASIMO: system overview and integration,” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Sys- tems, pp. 2478-2483, 2002.
[12] http://www.bostondynamics.com : PETMAN.
[13] G. S. Hornby, S. Takamura, T. Yamamoto, and M. Fujita, “Autonomous evolution of dynamic gaits with two quadruped robots,” IEEE Transactions on Robotics, vol. 21, no. 3, pp. 402-410, 2005.
[14] M. Raibert, K. Blankespoor, G. Nelson, R. Playter, and the BigDog Team, “BigDog, the rough-terrain quadruped robot,” Proc. of the 17th World Congress The Int. Federation of Automatic Control, pp. 10822- 10825, 2008.
저 자 소 개