1. 昢 嵦
㤊㩚㫆Ị㦚 䟻㌗㔲䋺₆ 㥚䞮㡂 ⏎Ⳋὒ 㹾㼊⪲
䎆 ㌳䞮⓪ 㰚☯㦚 㹾┾㔲䋺⓪ ㍲㓺䗲㎮ 㔲㓺 䎲㠦 ╖䞲 㡆ῂṖ 䢲䧞 㰚䟟♮ἶ 㧞┺ ㍲㓺䗲 .
㎮ 㔲㓺䎲㦖 䋂Ợ 䡚Ṗ㧻䂮 ㍲㓺䗲㎮ὒ 㦮㧦 ㍲ 㓺䗲㎮㦒⪲ ⋮③ 㑮 㧞⓪◆ 䡚Ṗ㧻䂮 ㍲㓺䗲㎮㦖
⏎Ⳋ㦒⪲䎆 㩚╂♮⓪ 㰚☯㦚 Ṧ㐶㔲䌂 㑮 㧞⓪
Ⳋ 㦮㧦 ㍲㓺䗲㎮㦖 㤊㩚㧦Ṗ ⓦ⋚ 㑮 㧞⓪ ,
⳾✶ 㰚☯㦚 䣾ὒ㩗㦒⪲ Ṧ㐶㔲䌂 㑮 㧞⓪ 㧻㩦 㧊 㧞┺ 㾲⁒㠦⓪ 㦮㧦 ㍲㓺䗲㎮㠦 㰖⓻䡫ⶒ㰞 . 㦚 㧊㣿䞲 㰚☯䦷㑮㧻䂮⯒ 㧻㹿䞮ἶ 㧊⯒ 㩲㠊䞮 㡂 㔏㹾Ṧ㦚 䟻㌗㔲䋺⩺⓪ 㡆ῂṖ 䢲䧞 㰚䟟 㭧 㧊┺[1][2][3].
㦮㧦 ㍲㓺䗲㎮ 㔲㓺䎲㦖 㤊㩚㧦 㔶㼊㦮 ☯㡃䞯 㩗 䔏㎇㧊 䋂Ợ ⋮䌖⋮ἶ Ⱔ㦖 ′䂯㎇㦚 Ṗ㰖
⸖⪲ 㩫䢫䞲 ⳾◎㠦 ₆䞮⓪ 㩲㠊₆⪲⓪ ㎇⓻䟻
㌗㠦 䞲ἚṖ 㧞┺ ⽎ ⏒ⶎ㠦㍲⓪ 㑮䞯㩗㧎 ⳾◎ .
㠜㧊 㩲㠊₆ ㍺ἚṖ Ṗ⓻䞲 䗒㰖⏒Ⰲ⯒ 㧊㣿䞮㡖
┺ 㔲㓺䎲㦚 䋂Ợ 㦮㧦 ㍲㓺䗲㎮ὒ 㤊㩚㧦㦮 㫆 . 䞿㦒⪲ Ṗ㩫䞮ἶ 䗒㰖 㩲㠊₆㦮 㧛⩻⼖㑮⪲ 㦮㧦 㦮 㑮㰗䟻㦮 ㏣☚㢖 㤊㩚㧦㦮 ⲎⰂ㠦㍲㦮 㑮㰗䟻㦮 Ṗ㏣☚⯒ ㌂㣿䞮㡖┺ 䗒㰖⏒Ⰲ⓪ 㑮 . 䞯㩗㧎 㩧⁒㠦 ゚䟊 㩲㠊₆ ㍺Ἒ㠦 Ⱔ㦖 㧦㥶☚
Ṗ 㧞㦒⸖⪲ [4][5] ⽊┺ ῂ㼊㩗㧎 㩲㠊₆ ῂ㎇㧊 Ṗ⓻䞮㡖┺.
⽎ 㡆ῂ㠦 ㌂㣿♲ 㦮㧦 ㍲㓺䗲㎮㦖 㧒㩗㧎 Ṗ㥚䡫䌲⯒ ㌂㣿䞮㡖㦒Ⳇ MR ╦䗒⯒ 㑮㰗㦒⪲ 㧻 㹿䞮㡖┺ 㔺䠮㦖 㥶㞫㔳 Ṗ㰚₆⯒ 䐋䞮㡂 㔺䠮 . 㔺 ⌊㠦㍲ 㧊⬾㠊㪢㦒Ⳇ 㹾㼊㦮 㰚☯㦖 Ⲗ⹎Ṗ Ṗ㧻 㓓Ợ 㧒㠊⋮⓪ 4Hz 㦮 ㌂㧎䕢 [6] 㢖 ′䂯 㰚☯㦒⪲ ⳾㌂䞮㡖┺ ㍺Ἒ♲ 䗒㰖 㩲㠊₆⓪ 㔲 .
⸂⩞㧊㎮ὒ 㔺䠮㦚 䐋䞮㡂 ㎇⓻㦚 Ỗ㯳䞮㡖㦒Ⳇ 㡆㏣ 㓺䃊㧊䤛 㩲㠊₆㢖 ゚ᾦ䞮㡂 㤆㑮㎇㦚 䢫㧎 䞮㡖┺ 㔺䠮ἆὒ⓪ Ṗ㰚₆㢖 㦮㧦㦮 㰚☯ 㩚╂ .
⮶㦚 䐋䞮㡂 ㍳䞮㡖ἶ 㤊㩚㧦㦮 ⲎⰂ㠦㍲ Ṗ ,
㏣☚ ◆㧊䎆⯒ 䁷㩫䞮㡂 SEAT Ṩ㦚 ῂ䞮ἶ 㧊⯒
䐋䟊 㔏㹾Ṧ㦚 䘟Ṗ䞮㡖┺[6].
╦䗒⯒ 㧊㣿䞲 㦮㧦 ㍲㓺䗲㎮ 㔲㓺䎲㦮 䗒㰖 㩲㠊
╦䗒⯒ 㧊㣿䞲 㦮㧦 ㍲㓺䗲㎮ 㔲㓺䎲㦮 䗒㰖 㩲㠊 ╦䗒⯒ 㧊㣿䞲 㦮㧦 ㍲㓺䗲㎮ 㔲㓺䎲㦮 䗒㰖 㩲㠊
╦䗒⯒ 㧊㣿䞲 㦮㧦 ㍲㓺䗲㎮ 㔲㓺䎲㦮 䗒㰖 㩲㠊 ty
ty ty ty
Fuzzy Control of a Seat Suspension System with an MR Damper
Doyoung Jeon and Kyoung-chul Kong
Key Words: MR fliud damper(㧦₆㥶⼖㥶㼊 ╦䗒), fuzzy control(䗒㰖 㩲㠊), 㦮㧦 㰚☯Ṧ㐚 㔲㓺䎲
seat suspension system( )
Abstract
This paper applies the fuzzy logic controller to a semiactive seat suspension system in order to obtain the better ride comfort in constraint of specific rattle space. The seat suspension system used for this research is a scissors-type one with the MR (Magnetic Rheological) fluid damper. Since a seat suspension system with a driver can not be exactly modeled, it is effective to control with the fuzzy logic controller. The rule was carefully tuned to effectively reduce the vibration transmitted to a driver. The on-road ride was realized on a hydraulic excitor and the result shows that the fuzzy controller has reduced the vibration of a seat suspension system compared to the continuous skyhook controller.
ನ
㍲ṫ╖䞯ᾦ ₆ἚὋ䞯ὒE-mail : [email protected]
TEL : (02)705-8634 FAX : (02)712-07
*
㍲ṫ╖䞯ᾦ ₆ἚὋ䞯ὒ ╖䞯㤦碂滆 洢檺匶 昪凊 2.
柢枪癢 把昣 2.1
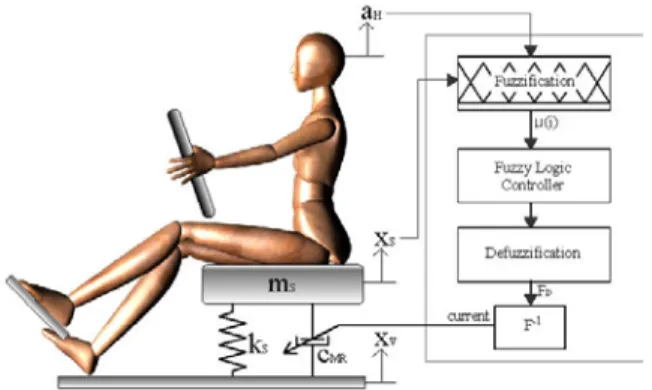
㦖 㦮㧦 ㍲㓺䗲㎮ 㔲㓺䎲㦮 ῂ㎇㦚 ⽊㡂 Fig. 1
㭖┺ ㍲㓺䗲㎮㠦 ⍦Ⰲ ㌂㣿♮⓪ 㡆㏣ 㓺䃊㧊䤛 . 㩲㠊₆⓪ 㦮㧦㢖 㹾㼊㦮 ㏣☚⯒ ㌂㣿䞮㡂 Ṧ㐶₆ 㦮 Ṧ㐶⩻㦚 ἆ㩫䞲┺ ⁎⩂⋮ 㡆㏣ 㓺䃊㧊䤛 㩲 . 㠊₆⓪ 㤊㩚㧦 㔶㼊㦮 㰚☯ 㩫⽊Ṗ 㩲㠊₆㠦 㡗♮㰖 㞠⓪ ┾㩦㧊 㧞┺ ⽎ 㡆ῂ㠦㍲⓪ 㦮㧦㦮 . 㑮㰗㏣☚㢖 䞾℮ 㤊㩚㧦 ⲎⰂ㠦㍲㦮 Ṗ㏣☚⯒ 㩲 㠊₆㦮 㧛⩻㦒⪲ ㌂㣿䞮㡖┺ 㦮㧦㦮 㰚☯㌗䌲⯒ . 䁷㩫䞮₆ 㥚䟊 㦮㧦㦮 㥚䂮 ㏣☚ Ṗ㏣☚⯒ ㌂㣿 , , 䞶 㑮 㧞㰖Ⱒ ㌂⧢㦮 ⶊỢ㠦 ➆⧒ 䘟䡫㥚䂮Ṗ ┺
⯊ἶ 㩞╖㥚䂮⯒ 䁷㩫䞮₆ 㠊⪋₆ ➢ⶎ㠦 㥚䂮 㩫⽊⓪ ㌂㣿㠦 㠊⩺㤖㧊 ➆⯊ἶ ₆Ἒ㩗㧎 ⹎㎎䞲 㰚☯㠦 㦮䞮㡂 Ⱔ㦖 ⏎㧊㯞Ṗ 䙂䞾♮⓪ Ṗ㏣☚
㩫⽊ ⡦䞲 ㌂㣿㠦 㠊⩺㤖㧊 ➆⧦┺ ➆⧒㍲ Ṗ㧻 . 䣾ὒ㩗㦒⪲ 㰚☯ ㌗䌲⯒ 䁷㩫䞶 㑮 㧞⓪ 㦮㧦㦮
㏣☚
x˙ S⯒ 㧛⩻⼖㑮⪲ ㌂㣿䞮㡖┺ ⡦䞲 Ⲗ⹎⯒ .
㌳㔲䋺ἶ 䞒⪲Ṗ 㕩㧊☚⪳ 䞮⓪ ⼖㑮Ṗ 㤊㩚㧦 㦮 ⲎⰂ㠦㍲㦮 Ṗ㏣☚㧊⸖⪲ [6] ⲎⰂ㠦㍲㦮 Ṗ㏣☚
aH⯒ 㧛⩻⼖㑮⪲ ㌂㣿䞮㡖┺ ṗ 㧛⩻⼖ . 㑮(
x˙ S,
aH) Ṗ ⳾⚦ 0 㧊 ♮☚⪳ 䞮⓪ ộ㧊 ⽎ 㩲㠊
₆ ㍺Ἒ㦮 ⳿䚲㧊⸖⪲ 䁷㩫♲
x˙ S㢖
aH⯒ 㠦⩂⪲
㖾 㩫㦮䞮ἶ 䗒㰖 ⏒Ⰲ⯒ 㧊㣿䞮㡂 ♮ⲏ㧚䞮㡖
┺.
碂滆 嚂庲 洢檺匶 2.2
Fig. 2 㢖 ṯ㧊
x˙ S㢖
aH⯒ ṗṗ 䗒㰖䢪䞮⓪ Ⲻ⻚
㓓 䞾㑮⯒ ῂ㎇䞮㡖┺ 䁷㩫♲ ㎒㍲㔶䢎⓪ . -1 㠦㍲
㌂㧊㦮 Ṩ㦚 Ṭ☚⪳ 䋂₆⯒ 㫆㩞䞮㡖㦒Ⳇ ṗṗ 1
㦮 㧛⩻⼖㑮⓪ 㩞╖Ṩ㠦 ╖䟊 ⰺ㤆㧧㦢 (VS), 㧧 㦢 (S), 㫆⁞㧧㦢 (LS), 㫆⁞䋒 (LB), 䋒 (B), ⰺ㤆䋒 㦮 ┾Ἒ㦮 䗒㰖 㰧䞿㦒⪲ ῂ䞮㡖┺ Ⲻ⻚
(VB) 6 .
㓓 䞾㑮⓪ Ἒ㌆ ㏣☚Ṗ Ṗ㧻 ザ⯎ ㌒ṗ䡫 䡫䌲⯒
㌂㣿䞮㡖┺ ṗ 䗒㰖 㰧䞿㦖 . 0 㠦㍲ 1 ₢㰖㦮 㡆㏣
㩗㧎 Ṩ㦚 Ṗ㰖Ⳇ ⁎ Ṩ㦖 䁷㩫♲ ㎒㍲㔶䢎Ṗ ṗ 䗒㰖 㰧䞿㠦 䙂䞾♮⓪ ゚㥾㦚 㦮⹎䞲┺.
x˙ S⓪ 㦮 㔶䢎⯒ ⹎䞮⓪ ὒ㩫㠦㍲ ⏎㧊㯞Ṗ 㯳 LVDT
䙃♮㠊 ⰺ㤆㧧㦢 (VS) 㰧䞿ὒ 㧧㦢 (S) 㰧䞿㦮 Ṩ㧊 ỿ䞮Ợ ⟾Ⰲ⓪ ⶎ㩲Ṗ ㌳䞮㡖┺ ➆⧒㍲ .
x˙ S㦮 Ⲻ⻚㓓 䞾㑮⯒ Fig. 2(b) 㢖 ṯ㧊 ⼖䡫䞮㡂 䗒㰖
Fig. 1 Seat suspension system and control scheme
0 0.2 0.4 0.6 0.8 1.0 Inpu t variable : Acc of head 1
0.5 0
V S S L S LB B V B
(a) Acceleration of a driver's head
aH0 0.2 0.4 0.6 0.8 1.0 Inpu t variable : V el of sea t 1
0.5 0
V S S LS LB B V B
(b) Velocity of a seat
x˙ SFig. 2 Scaled Membership functions
㩲㠊₆Ṗ ⏎㧊㯞 㡗㡃㠦㍲ ⚪Ṧ䞮☚⪳ 䞮㡖┺.
⡦䞲 ㎒㍲㔶䢎Ṗ 㩞╖Ṩ㠦 㦮䟊 䋂₆Ṗ ἆ㩫♮ἶ
䢎㠦 㦮䟊 䟻㧊 ἆ㩫♮⓪ ╖䃃㎇㦚 Ṗ㰖⸖⪲
Ἒ㌆ὒ㩫㦚 㭚㧊₆ 㥚䞮㡂 ┺㦢ὒ ṯ㦖 䢎 ⼖ 㑮⯒ ㍺㩫䞮ἶ 㩞╖Ṩ㦒⪲ Ⲻ⻚㓓 䞾㑮⯒ ῂ㎇䞮 㡖┺.
S1 = sgn(
x˙ S) (1)
S2 = sgn(
aH) (2)
➆⧒㍲ 䁷㩫♲ ㎒㍲㔶䢎⓪ 6 ┾Ἒ㦮 䗒㰖 㰧䞿
ὒ 2 ┾Ἒ㦮 䢎⼖㑮⪲ 䚲䡚♲┺ Ⲻ⻚㓓 䞾㑮⯒ .
䐋䞮㡂 㠑㠊㰚 ṗ 䗒㰖 㰧䞿㦚 㧊㣿䞮㡂 䣾ὒ㩗
㦒⪲ 㿲⩻Ṩ㦚 ἆ㩫䞮₆ 㥚䞲 㩲㠊′䂯✺㦚
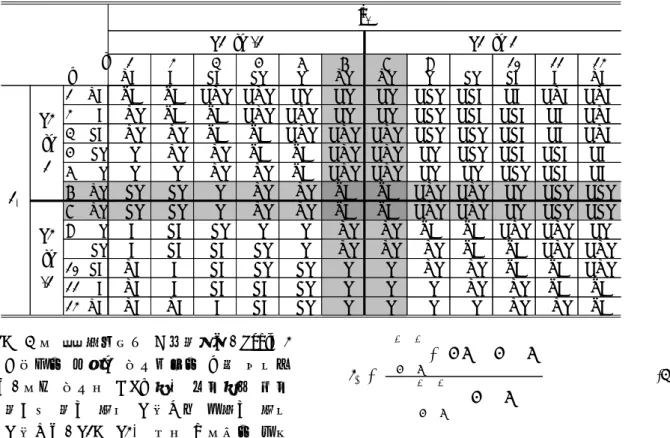
ὒ ṯ㧊 䚲 䡫㔳㦒⪲ ῂ㎇䞮㡖┺
Table 1 . Table 2
⓪ 㩲㠊′䂯✺㠦 ㌂㣿♲ 㿲⩻⼖㑮㠦 ╖䞲 㩫㦮⯒
⽊㡂㭖┺ 㧊➢ 㿲⩻㦖 . MR ╦䗒Ṗ ㍲㓺䗲㎮ 㔲㓺 䎲㠦 Ṗ䞮ἶ㧦 䞮⓪ 䧮㦚 ⋮䌖⌊Ⳇ 䢎⓪ 䧮㦮
䟻㦚 ⋮䌖⌎┺ . S1 ὒ S2 Ṗ 㧧㦖 ⏎㧊㯞㠦 㦧 䞮㡂 1 ὒ -1 㦚 ỿ䞮Ợ 㢫⽋䞮⓪ ộ㠦 ╖゚䞮㡂 㦮 ㌟䂶♲ 㡗㡃㧎 ⰺ㤆㧧㦢 㰧䞿㦖
Table 1 (VS)
ὒ 㠦 ㌗ὖ㠜㧊 ṯ㦖 㿲⩻Ṩ㦚 Ṭ☚⪳ ㍺㩫 S1 S2
䞮㡖┺ 䔏䧞 .
x˙ S㢖
aHṖ ⳾⚦ ⰺ㤆㧧㦢 (VS) 㰧䞿 㧒 ➢ ⏎㧊㯞㦮 㡗䟻㧊 Ṗ㧻 Ⱔ㧊 ⋮䌖⋮⸖⪲ 㧊 ἓ㤆㦮 㿲⩻Ṩ㦚 㿲⩻ 㠜㦢 (ZE) 㦒⪲ ㍺㩫䞮㡖┺ .
ṗṗ㦮 䗒㰖 㰧䞿㠦 ╖䟊 ἆ㩫♲ 㿲⩻Ṩ㦖 㰧 䞿㦮 䡫䌲⪲ 䚲䡚♮⸖⪲ MR ╦䗒㦮 㿲⩻Ṩ㦚 㓺 䃒⧒ Ṩ㦒⪲ ἆ㩫䞮₆ 㥚䞮㡂 (3) ὒ ṯ㦖 ゚䗒㰖 䢪 ὒ㩫㧊 䞚㣪䞮┺.
fD=
Σ
i N
Σ
j N
F (i, j )µ (i )σ (j )
Σ
i NΣ
j N
µ (i )σ (j )
(3)
㡂₆㍲
i㢖
j⓪ ṗ 䗒㰖 㰧䞿㦚 㒁㧦⪲ 䚲䡚䞲 ộ㧊Ⳇ Table 1 㠦 䚲㔲♮㠞┺ .
µ (i )㢖
σ (j )⓪ ṗ ṗ
x˙ S㢖
aHṖ ṗ 䗒㰖 㰧䞿㠦 䙂䞾♮⓪ ゚㥾㦚
⋮䌖⌎┺ . N 㦖 ṗ ⼖㑮㠦 ╖䞲 䗒㰖 㰧䞿㦮 Ṳ㑮
⯒ ⋮䌖⌊Ⳇ 12 㧊┺ .
F (i, j )⓪ ṗ ἓ㤆Ṗ Ṭ⓪ 㿲⩻Ṩ㦚 㦮⹎䞲┺.
㥶㼊⓪ ク䟚㥶㼊㦮 䔏㎇㦚 ⋮䌖⌊⸖⪲
MR [8]
╦䗒㦮 Ṧ㐶⩻㦖 㩲㠊Ṗ Ṗ⓻䞲 㩚┾⩻ὒ MR
㩚⮮⪲㖾 㩲㠊Ṗ Ṗ⓻䞲 㩦㎇Ṧ㐶⩻㦒⪲ ⋮③ 㑮 㧞┺ . MR ╦䗒㦮 Ṧ㐶⩻㦖 (4) 㢖 ṯ㧊 䚲䡚♲┺ .
fD = αu sgn (x˙ S− x˙ V)
(4)
㡂₆㍲
α⓪ 㩚⮮㠦 ➆⯎ MR ╦䗒㦮 Ṧ㐶⩻㦮 ゚
⯒ ⋮䌖⌊⓪ ㌗㑮㧊ἶ
u⓪ 㩚⮮㔶䢎㧊┺.
x˙ S㢖
x˙ V⓪ ṗṗ 㦮㧦㢖 㹾㼊 Ṗ㰚₆ 㦮 㑮㰗䟻 ㏣☚ ( ) 㧊ἶ
sgn(x˙ S− x˙ V)㦖 MR ╦䗒Ṗ 㧻㹿♲ ⚦ 䝚⩞
㧚㦮 ㌗╖㏣☚㦮 䟻㦚 ⋮䌖⌎┺.
╦䗒⓪ 㰚☯㠦⍞㰖⯒ 䦷㑮䞮⓪ ộⰢ Ṗ⓻ MR
䞮⸖⪲ 㧒 ῂṚ㠦㍲ 㤦䞮⓪ Ṧ㐶⩻
fD⓪ 㥶䣾 䞮㰖 㞠┺ . MR ╦䗒㦮 ㌗╖㏣☚㢖 㤦䞮⓪ Ṧ㐶⩻
fD
㦮 䟻㧊 㧒䂮䞶 ➢㠦Ⱒ 㩲㠊Ṗ 㥶䣾䞮Ⳇ 㧊 Table 1. Fuzzy control rule bases
j i
x˙ S
S1 is -1 S1 is 1
VB1 2
B 3
LB 4 LS 5
S 6
VS 7 VS 8
S LS 10 LB 11
B 12 VB
aH
S2
is 1
1 VB
ZE ZE NVS NVS NS NS NS NLS NLB NB NVB NVB
2 BPVS ZE ZE NVS NVS NS NS NLS NLB NLB NB NVB
3 LBPVS PVS ZE ZE NVS NVS NVS NLS NLS NLB NB NVB
4 LSPS PVS PVS ZE ZE NVS NVS NS NLS NLB NLB NB
5 SPS PS PVS PVS ZE NVS NVS NS NS NLS NLB NB
6 VSPLS PLS PS PVS PVS ZE ZE NVS NVS NS NLS NLS
S2 is -1
7 VS
PLS PLS PS PVS PVS ZE ZE NVS NVS NS NLS NLS
8 SPB PLB PLS PS PS PVS PVS ZE ZE NVS NVS NS
LS
PB PLB PLB PLS PS PVS PVS PVS ZE ZE NVS NVS
10 LBPVB PB PLB PLS PLS PS PS PVS PVS ZE ZE NVS
11 BPVB PB PLB PLB PLS PS PS PS PVS PVS ZE ZE
12 VBPVB PVB PB PLB PLS PS PS PS PS PVS PVS ZE
Table 2. Variable definitions
㫆Ị㦚 䗒㰖 ′䂯㦒⪲ Ⱒ✺₆ 㥚䞮㡂 䢎⼖㑮 㦚 ㍺㩫䞮㡖┺
S3 .
S3 = sgn(
x˙ S−x˙ V) (5)
㥚㦮 ⼖㑮⓪ MR ╦䗒㦮 ㌗╖㏣☚㦮 䟻㦚 ⋮ 䌖⌊Ⳇ ὒ 1 -1 ⪲ 䚲䡚♲┺ .
Ⱎ㰖Ⱏ 㩲㠊′䂯㦖 ⓻☯′䂯㦒⪲㖾 ┺㦢ὒ ṯ㧊 ῂ㎇♮㠞┺.
If
fDS3 is Positive, then
u = fDα
(6)
If
fDS3 is Negative, then
u = 0(7)
柢悲崎決晞 3.
㧎㼊 㰚☯㡆ῂ 㟒㠦㍲ ⍦Ⰲ 㧊㣿♮⓪ 㧎㼊⳾
◎Ⱇ㦚 ₆㦒⪲ 㤊㩚㧦⯒ 4 㧦㥶☚ [6], 㤊㩚㍳㦚 㧦㥶☚⪲ 䞮㡂 ὒ ṯ㦖 㦮㧦 ㍲㓺䗲㎮ 㔲
2 Fig. 1
㓺䎲㦚 ῂ㎇䞮㡖┺ . 㹾㼊⓪ 4Hz 㦮 ㌂㧎䕢㢖 㦮 ㎇㦚 Ṭ⓪ ′䂯 㰚☯㦚 Ṭ☚⪳
0.5Hz~10Hz
䞮㡖┺ ⡦䞲 ㎒㍲㦮 ⏎㧊㯞㢖 ₆Ἒ㩗 ⏎㧊㯞⯒ . ἶ⩺䞮㡂 ㎒㍲ 㿲⩻Ṩ㠦 Ṗ㤆㔲㞞 ⏎㧊㯞⯒ 䙂䞾 㔲䆆┺.
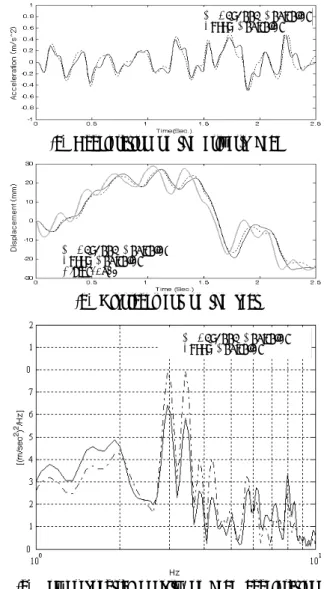
⓪ ′䂯 㣎⧖㠦 ╖䞲 㔲⸂⩞㧊㎮ ἆὒ Fig. 3
⯒ ⽊㡂㭖┺ . Fig. 3(a) 㠦 ⋮䌖⌎ 㤊㩚㧦 ⲎⰂ㠦㍲
㦮 Ṗ㏣☚㠦 ╖䟊 SEAT Ṩ㦚 ῂ䟊⽊Ⳋ 㡆㏣ 㓺 䃊㧊䤛 㩲㠊₆⯒ ㌂㣿䟞㦚 ἓ㤆 61.2%, 䗒㰖 㩲 㠊₆⯒ ㌂㣿䟞㦚 ἓ㤆 56.7% Ṗ ⋮䌖⌂┺ . Fig.
㦮 ⯒ ⽊Ⳋ 㠦㍲⓪ 㡆㏣ 㓺䃊㧊䤛
3(c) PSD 1~2Hz
㩲㠊₆⯒ ㌂㣿䟞㦚 ➢㠦 ゚䟊 ㎇⓻㧊 ┺㏢ ⟾㠊 㰖㰖Ⱒ ㌂⧢㧊 Ṗ㧻 䞒⪲Ṧ㦚 ⓦ⋒⓪ 4~8Hz 㭒 䕢㑮 ╖㡃㠦㍲⓪ ㎇⓻㧊 䟻㌗♮㠞㦢㦚 㞢 㑮 㧞
┺.
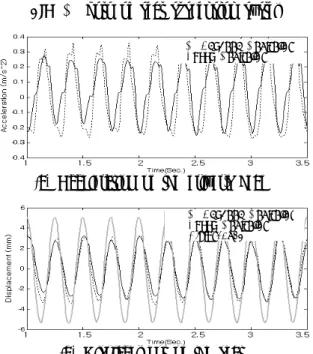
⓪ 㦮 ㌂㧎䕢 㰚☯㠦 ╖䞲 㔲⸂⩞㧊 Fig. 4 4Hz
㎮ ἆὒ⯒ ⽊㡂㭖┺ . Fig. 4(a) ⓪ 䗒㰖 㩲㠊⯒ ㌂ 㣿䟞㦚 ➢ 㡆㏣ 㓺䃊㧊䤛 㩲㠊⯒ ㌂㣿䟞㦚 ➢㠦
゚䞮㡂 㤊㩚㧦Ṗ ⓦ⋒⓪ Ṗ㏣☚Ṗ Ṧ㏢䞮㡖㦢㦚
⋮䌖⌎┺ ṗṗ㠦 ╖䟊 . SEAT Ṩ㦚 ῂ䟊⽎ ἆὒ 㡆㏣ 㓺䃊㧊䤛 㩲㠊₆⯒ ㌂㣿䟞㦚 ἓ㤆 51.5%, 䗒㰖 㩲㠊₆⯒ ㌂㣿䟞㦚 ἓ㤆 47.8% ⯒ ⋮䌖⌞┺ .
(a) Acceleration of the driver's head
(b) Displacement of the seat
(c) Power spectral density of head acceleration Fig. 3 Simulation results for random vibration
(a) Acceleration of the driver's head
(b) Displacement of the seat
Fig. 4 Simulation results for 4Hz sine vibration
--- C. Skyhook Controller --- Fuzzy Controller
--- C. Skyhook Controller --- Fuzzy Controller
--- C. Skyhook Controller --- Fuzzy Controller
--- Disturbance
--- C. Skyhook Controller --- Fuzzy Controller
--- Disturbance
--- C. Skyhook Controller --- Fuzzy Controller
Fig. 5 Photo of seat suspension system
(a) Acceleration of the driver's head
(b) Displacement of the seat
Fig. 6 Experimental results of 70Kg man for 4Hz sinusoidal vibration
柪竞冶刂 愕 把昣 4.
⽎ 㡆ῂ㠦 ㌂㣿♲ 㦮㧦 ㍲㓺䗲㎮ 㔲㓺䎲㦖 Fig.
ὒ ṯ㧊 ⚦ Ⲻ⻚Ṗ ㍲⪲ 㠝Ṟ⩺ 㤊☯䞮Ⳇ
5 50mm
㦮 㑮㰗㤊☯㦚 ⽊㧻䞮⓪ 㧒㩗㧎 Ṗ㥚䡫䌲㧊┺.
㓺䝚Ⱇὒ MR ╦䗒Ṗ ṗ 䝚⩞㧚㠦 ╖䟊 㑮㰗㦒⪲
㧻㹿♮㠞ἶ 㥚䂮㩫⽊⯒ 䣣✳䞮₆ 㥚䞮㡂 LVDT Ṗ 㧻㹿♮㠞┺ 㤊㩚㧦 ⲎⰂ㦮 Ṗ㏣☚⯒ 䁷㩫䞮 . ἶ 㔏㹾Ṧ㦚 䘟Ṗ䞮₆ 㥚䞮㡂 㔺䠮㠦 㺎Ṗ䞲 㤊 㩚㧦⓪ Ṗ㏣☚㎒㍲Ṗ 㹿♲ 䡂ⲽ㦚 㹿㣿䞮㡖┺.
䞒 㔺䠮㧦⓪ 䋺 177Cm, ⴎⶊỢ 70Kg 㦮 20 ╖㦮
㎇㧎 ⋾㎇ὒ 䋺 153Cm, ⴎⶊỢ 42Kg 㦮 20 ╖㦮
㎇㧎 㡂㎇㦒⪲ ῂ㎇♮㠞┺ ⡦䞲 ☯㧒䞲 㫆Ị䞮 . 㠦㍲ 㔺䠮㦚 㡂⩂ ⻞ ⽋䞮㡂 㭧Ṛ㩫☚㦮 ㎇⓻ 㦚 Ṗ㰖⓪ Ṩ㦚 ㍶䌳䞮㡖┺.
㌂㧎䕢㢖 ′䂯 㔶䢎⯒ Ṗ㰚₆㠦 㧛⩻䞮 4Hz
㡂 㹾㼊㦮 㰚☯㦚 ⳾㌂䞮㡖┺ 㧊➢ 㡆㏣ 㓺䃊㧊 .
䤛 㩲㠊₆㦮 㧊㌗㩗 Ṧ㐶Ἒ㑮
CSKY⯒ 㔺䠮㦚
⽋䞮㡂 䓲┳䞲 ┺㦢 䗒㰖 㩲㠊₆㢖 ㎇⓻㦚 ゚ᾦ 䘟Ṗ䞮㡖┺.
㦖 ⋾㎇ 㔺䠮㧦㦮 ㌂㧎䕢 㰚☯
Fig. 6 70Kg 4Hz
㠦 ╖䞲 㔺䠮ἆὒ⯒ ⽊㡂㭒Ⳇ Fig. 6(a) ⓪ 䗒㰖 㩲㠊⯒ ㌂㣿䟞㦚 ➢Ṗ 㡆㏣ 㓺䃊㧊䤛 㩲㠊⯒ ㌂ 㣿䟞㦚 ➢㠦 ゚䞮㡂 㤊㩚㧦 ⲎⰂ㦮 Ṗ㏣☚Ṗ Ṧ㏢䞲 ộ㦚 ⽊㡂㭖┺ 䔏䧞 㡆㏣ 㓺䃊㧊䤛 㩲㠊 .
⯒ ㌂㣿䟞㦚 ➢ ⋮䌖⌂▮ Ṗ㏣☚㦮 䞒䋂Ṗ 䗒㰖 㩲㠊⯒ ㌂㣿䟞㦚 ➢ ㌂⧒㪢┺ . ṗṗ㠦 ╖䞲 Ṩ㦚 ῂ䞲 ἆὒ 㡆㏣ 㓺䃊㧊䤛 㩲㠊₆⯒
SEAT
㌂㣿䟞㦚 ➢ 61.3% , Ṗ 䗒㰖 㩲㠊₆⯒ ㌂㣿䟞㦚
➢ 57.5% Ṗ 䘟Ṗ♮㠞┺ .
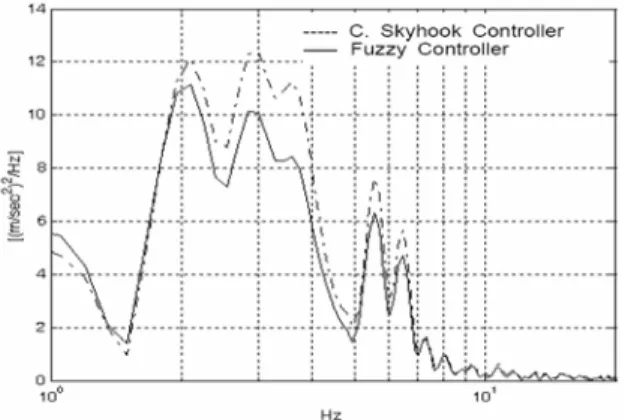
㦖 ⋾㎇㦮 ′䂯 㰚☯㠦 ╖䞲 㔺 Fig. 7 70Kg
䠮ἆὒ⯒ ⽊㡂㭖┺ ⌄㦖 㭒䕢㑮 㡗㡃㠦㍲ 䗒㰖 . 㩲㠊₆Ṗ 㡆㏣ 㓺䃊㧊䤛 㩲㠊₆㠦 ゚䞮㡂 ㎇⓻㧊
(a) Acceleration of the driver's head
(b) Displacement of the seat
(c) Power spectral density of head acceleration Fig. 7 Experimental results of 70Kg man for
random vibration
--- C. Skyhook Controller --- Fuzzy Controller
--- C. Skyhook Controller --- Fuzzy Controller
--- Disturbance
--- C. Skyhook Controller --- Fuzzy Controller --- C. Skyhook Controller
--- Fuzzy Controller
--- C. Skyhook Controller --- Fuzzy Controller
--- Disturbance