Practice for Modular Mobile Robot and Position Recognition system in Ubiquitous Network
9
0
0
전체 글
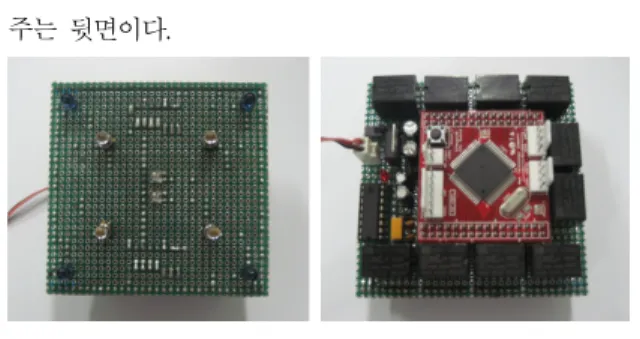
(2) 한국실천공학교육학회논문지 제 4 권 제 2 호 2012년 12월. 가지 실습을 할 수 있도록 하고, 로봇 자신의 위치를 정확히 판단하고 이동할 수 있는 효과적인 방법을 제안하고 구현하고자 한다. 그리고 현재 진행 중인. 11개의 거리측정센서를 사용하고 제어 장치는 메인 제어기와 서브제어기로 구성된다. 또한 USB 카메라도 연결할 수 있도록 하였다. 그. SLAM(Simultaneous Localization and Mapping)이 뛰어난 성능에도 불구하고 하드웨어와 소프트웨어의 가격이 너무 비싸 실용화 및 간단한 실습이 어렵고. 밖에 추가 기능 탑재 모듈이 추가되면 서브제어기가 활성화 되고 알고리즘 부분에 모듈을 추가하여 실행 하면 된다. 모바일 로봇의 데이터 흐름도는 그림 2와. 위치 인식 하드웨어 설치에 시간이 많이 걸린다는 점을 고려하여 구입이 용이하고 가격도 저렴한 포토 센서를 이용하여 로봇이 위치인식을 할 수 있도록. 같다.. 한다.. Ⅱ. 시스템의 구성 본 논문에서 제안한 시스템은 모바일 로봇, 천장 에 설치되어 로봇의 위치를 안내하는 랜드마크(Land Mark), 경로의 주요요소에 설치되어 환경을 인식하 여 알려주는 환경센서 모듈 그리고 환경센서 모듈의 정보를 받아 모바일 로봇에게 알려주는 서버로 구성 된다. 그림 1은 전체 시스템 구성도이다.. <그림 2> 모바일 로봇의 데이터 흐름도 Fig2. Flowchart of mobile robot 그림 3은 모바일 로봇 시스템의 기본적인 외형 모 습을 나타낸다.. <그림 1> 전체 시스템의 구성도 Fig.1 Structure of the system 1. 시스템에 사용된 센서 모바일 로봇은 거리측정을 위한 초음파 센서와 적 외선 센서로 구성된 거리측정 모듈, 기울기를 측정하 는 기울기(Tilt) 센서, 그리고 랜드마크 신호를 주고 받을 수 있는 포토센서 발광부와 수광부로 구성된다. 2. 모바일 로봇 시스템의 구성 본 논문에서 구현하는 모듈형 모바일 로봇은 2개 의 모터에 의해 구동되고 PID 제어 방식을 사용한 다. 거리측정을 하기 위해서는 8개의 초음파 센서와. <그림 3> 모바일 로봇의 기본적인 외형(정, 측, 뒤, 위) Fig.3 The basic shape of a mobile robot 그림 4는 모바일 로봇의 중간에 설치된 센서들의 배치도이다. 초음파 센서는 전방에 30도 각도로 7개 이고 후방에 한 개가 설치되었다. 그리고 전방, 좌측, 우측에 15도 각도로 배치되어 있는 3개가 1세트로 구성된 전체 9개의 거리측정 센 163.
(3) 정구철 : 유비쿼터스 네트워크에서 모듈형 모바일 로봇과 위치 인식 시스템을 위한 사례. 서가 위치하고 있다. 이 센서는 모바일 로봇의 이동 각도와 지도제작시 중요한 역할을 수행한다. 또한 전 방과 후방에 각각 한 개씩 있는 거리측정 센서는 전. 주는 뒷면이다.. 방과 후방에서 위험한 길(계단)을 판단하는 기능을 수행한다.. <그림 6> 랜드마크의 발광부(앞, 뒤) Fig.6 Infrared Emitting Diodes module of landmark. Ⅲ. 모바일 로봇 모델링 모바일 로봇의 모델링은 기구학과(kinematics)와 운동학(dynamics)으로 구성된다[1][2].. <그림 4> 초음파 센서와 거리측정 센서 배열 Fig.4 Arrangement of ultra-sonic and distance sensors. 3. 랜드마크(Landmark) 랜드마크는 천정에 위치하는 발광부와 모바일 로 봇에 부착된 수광부로 나누어진다. 모바일 로봇은 랜 드마크를 통해 자신의 위치를 파악한다. 그림 5는 제 작한 수광부 모듈과 배치도이다.. <그림 7> 모바일 로봇의 구동 모델 Fig.7 Model of mobile robot 모바일 로봇의 좌표는 로 나타 낸다. 여기서 는 모바일 로봇 바퀴의 중간 지점 이고, 는 기준좌표에서 좌표이다.. <그림 5> 수광부 모듈과 배치도 Fig.5 Photodetector module and arrangement 그림 6은 10개로 구성된 발광다이오드가 부착된 발광부의 앞면과 발광부의 적외선 신호를 발생시켜 164. 1. 모바일 로봇의 기구학 기구학(kinematics)은 움직임에 대해 힘, 토크 (torque), 관성(inertia) 등을 고려하지 않고 기하학적 인 움직임과 시간을 기준으로 위치, 속도, 그리고 매 니퓰레이터를 구성하는 링크들의 속도, 가속도간의 관계를 나타낸다. 실제로 매니퓰레이터의 작업은 대 상 부품, 도구 혹은 물체 등의 작업 대상물에 대하여 작용한다. 모바일 로봇의 구조는 두 개의 독립된 구.
(4) 한국실천공학교육학회논문지 제 4 권 제 2 호 2012년 12월. 동 바퀴를 가지고 있으며, 앞/뒤에는 각각 하나의 보 조바퀴를 가지고 있으며 3가지 조건으로 정의된다. 먼저 모바일 로봇은 측면방향으로 이동할 수 없으며 식 (1)로 표현할 수 있다.. . (1). 는 기준 좌표의 X-Y의 점이고 는 기준좌표 X축을 기준으로 모바일 로봇의 진행방행과 의 각도이다.. 는 모바일 로봇의 폭이고 은 바퀴. 의 반지름에 해당한다. 또 다른 두 개의 조건은 두 개 의 바퀴가 각각 회전하고, 구동하는 동안 미끄러지지. . (8). 모바일 로봇의 기구학(kinematics)은 자코비안 행 렬(Jacobian Matrix)을 사용하여 다음 식과 같이 표 현된다.. . . . . (9). 않으며, 이 조건들은 식 (2), (3)을 만족한다.. . . (2). . (3). 와 은 각각 구동하는 바퀴의 오른쪽과 왼쪽 의 회전 각도이다. 미분기하학(differential geometry) 의 기술을 사용함으로써 3개의 조건에서 두 조건은 nonholonomic이고 하나는 holonomic으로 나타낼 수 있다[3]. 식 (2)에서 식 (3)을 빼면 holonomic 조건을 얻을 수 있다.. . (4). . (5). 식 (4)를 , , 로 표현하면 식 (5)와 같이 holonomic. constraint. 방정식이 된다.. 두 개의. nonholonomic 조건은 식 (2)와 (3)을 더해서 얻을 수 있다.. . (6). 로봇의 좌표와 기준좌표 사이에 기하학적 관계는. 위의 식에서 사용된 자코비안 행렬의 미분계수에 서 속도에 대한 비선형현상이 나타나지만 비선형의 영향이 작기 때문에 무시해도 된다. 자코비안 행렬의 유사 역행렬(Pseudo-inverse matrix) . (7). 식 (6). (7)로부터 로봇의 속도와 바퀴의 각속도. 의 관계는 식 (8)와 같다.. . 을 이용해서 모바일 로봇 두 바퀴의 각. 가속도와 모바일 로봇의 가속도 관계는 다음과 같다.. . (11). 2. 모바일 로봇의 동력학 동역학(dynamics)은 운동을 발생시키는 힘을 고 려하지 않고 물체의 운동 자체만을 연구하는 기구학 (kinematics)과 물체에 적용하는 힘과 그 결과로 생 기는 운동을 관계시키는 운동역학으로 크게 분류된 다. 매니퓰레이터의 공구단이 주어진 궤적을 따라가 기 위해서 각 링크의 움직임을 제어하려면 각 링크 에 가해지는 힘의 균형을 위해 적절한 토크가 주어 져야 한다. 따라서 링크가 가속이 되면 구동부는 관 성에 대항할 수 있는 토크를 발생시켜야 한다. 본 논 문에 사용된 모바일 로봇의 전체 운동 에너지는 다 음 식으로 정의된다.. . . . . . 식 (7)로 표현된다.. . (10). (12) 여기서 은 라그랑지안(lagrangian) 방정식이다. 은 모바일 로봇의 무게이고, 는 기준좌표에서 의 축에 대한 로봇의 관성, 는 바퀴 축에 대 165.
(5) 정구철 : 유비쿼터스 네트워크에서 모듈형 모바일 로봇과 위치 인식 시스템을 위한 사례. 한 각각의 회전 관성이다. 라그랑지안 방정식에서 첫 번째 부분은 이동에 대한 운동에너지, 두 번째 부분 은 몸체의 회전에너지이고 세 번째 부분은 바퀴의 회. 피 및 비용이 커지기 때문에 10개로 한정하였다.. 전운동에너지이다. 라그랑지 방정식은 다음 식과 같 다.. . . (13) <그림 8> 위치인식 처리 과정. 위 식을 풀면 다음 식과 같다.. . (14). 여기서 등가 관성행렬인 와 각각의 구동 바퀴 의 토크 를 행렬 형태로 나타내면 다음과 같이 쓸 수 있다.. . . . . . . . . . . . . . . . . . . (15). 일반적으로 모바일 로봇은 주위 환경의 영향을 받 으므로 토크는 다음 식 (16)과 같다. . (16). Ⅳ. 시스템에 사용된 알고리즘 1. 위치측정 알고리즘 위치 인식은 실외에서는 오차범위가 적은 GPS를 이용하면 되지만 실내에는 위성의 신호가 전달되지 않으므로 문제가 된다[4]. 초기에는 로봇의 주행계를 이용하여 위치측정을 하였으나, 로봇 바퀴의 미끌어 짐 현상으로 인해 오차가 발생할 뿐만 아니라 하나 의 방법만으로는 정확한 로봇의 위치를 찾는데 한계 가 발생하였다. 따라서 본 논문에서는 모바일 로봇의 위치를 정확 하게 인식하기 위하여 여러 가지 방법을 통합하여 정밀도를 높였다. 전체 공간에서 모바일 로봇의 위치 를 인식하는 과정은 그림 8과 같다. 랜드마크 내에 많은 수의 포토센서 발광다이오드 를 사용하면 오차를 줄일 수 있으나, 하드웨어의 부 166. Fig.8 Process for position recognition 또한 랜드마크만을 사용할 경우 로봇 위치의 오차 가 발생하게 되므로 이를 극복하기 위해 로봇의 주 행계와 거리측정센서를 이용하여 오차를 보정하였다. 또한 하드웨어를 추가로 설치하는 것 대신 모바일 로봇에 설치된 센서를 이용하고 유비쿼터스 네트워 크 환경을 이용하여 정보를 취득할 수 있도록 하였 다. (1) 랜드마크를 이용한 위치측정 현재 위치인식은 RFID/Tag[5], 초음파 센서[6], 스테레오 카메라, RF통신 그리고 지그비(Zigbee) 등 을 랜드마크로 주로 사용하고 있다[7][8]. RFID/Tag 와 지그비를 이용하는 방법은 정확도는 높지만 하드 웨어 가격이 비싸고 사용에 제한적이다. 반면 초음파 센서는 하드웨어의 가격이 저렴하지만 퍼짐현상으로 인해 정확도가 떨어진다. 이러한 단점을 해결하기 위하여 하드웨어의 비용 과 정확도 모두를 충족시키기 위한 방법으로 포토 센서를 랜드마크로 사용할 수 있다. 이 경우 적외선 센서를 바닥에 촘촘히 부착하여 네트워크를 만들고 로봇의 위치를 인식하는 방법이 연구되었지만, 설치 문제가 발생하고 센서 인식 거리가 짧아 많은 수의 적외선 센서 모듈을 사용하는 단점이 발생하였다. 따라서 본 논문에서는 측정 범위 포토센서를 이용 하여 다양한 고유 주파수를 발생시키는 모듈을 제작 하여 위치인식을 하도록 하였다. 또한 포토센서를 사 용함으로써 하드웨어를 소형으로 제작함에 따라 설 치 공간을 극소화하고 비용도 절감할 수 있게 하였 다. 하나의 랜드마크에 사용된 포토센서의 발광다이오 드는 총 10개로 구성하고 모바일 로봇에 장착된 수 광 다이오드는 3곳으로 하여 로봇의 위치를 주어진 환경에서 인식하도록 하였다. 그림 10은 X-Y 평면에서 중심이 (0,0)일 경우에.
(6) 한국실천공학교육학회논문지 제 4 권 제 2 호 2012년 12월. 발광다이오드의 특성을 고려하여 원으로써 랜드마크 의 측정범위를 나타내었다.. (2) 로봇 주행계에 의한 위치측정 랜드마크를 이용한 방법은 전체 지도에 나타낸 랜 드마크 안의 대략적인 위치를 측정하므로 약간의 오 차가 발생한다. 따라서 로봇에 장착된 주행계에서 얻 은 주행거리와 로봇의 각도 정보를 이용하면 모바일 로봇의 위치를 결정하는데 정확성을 더욱 높일 수 있다[8]. 주행계의 주행 거리는 식 (20), (21)과 같고 각도는 식 (22)으로 표현된다.. ∆ . ∆ . <그림 9> 랜드마크 발광부와 수광부 Fig.9 A module of emitting diodes and photodetector 로봇에 설치된 3곳의 수신부에서 받은 신호에 대 한 로봇의 위치는 식 (17)과 같이 표현할 수 있다.. ∆ . . (20) (21) (22). 2. 거리센서를 이용한 로봇의 각도측정 로봇에 장착된 거리측정 센서를 이용하여 로봇의 현재 위치에서의 로봇의 진행 각도를 측정할 수 있다. 앞에서 거리측정 센서의 위치를 설명했듯이 전방에 3 개, 좌/우 측면에 3개를 이용한다. 거리측정 센서는 전 /좌/우의 중심에서 각각 ±15도 간격으로 배열되어 있 다. 여기서 는 첫 번째 세트 중앙에 위치한 거 리측정 센서라고 정의하고 와 는 중심에 서 각각 우측과 좌측에 위치한 거리측정 센서이다. 거리센서를 이용하여 각도를 측정할 때, 전/좌/우 측면의 각 3개 센서를 이용하여 복도의 벽면을 기준 으로 모바일 로봇의 절대적인 각도를 측정한다. 그리 고 모바일 로봇의 주행계에서 계산되는 각도와 거리. <그림 10> 포토센서 발광다이오드의 측정범위 Fig.10 Range of Infrared Emitting Diodes . . . . (17). 측정센서 정보에 의해 측정된 각도를 비교하여 오차 를 보정한다. 거리측정 센서는 최대 150cm이다.. 여기서 는 수신부 번호이고 는 수신부에서 받 은 신호 번호이다. 랜드마크에 의해 지역화된 범위는 식 (18)와 같다. . . . . (18). 여기서 는 랜드마크가 나타내는 지역의 번호이 고. 는 랜드마크 내의 지역 번호이다. 로봇의 수신. 부에서 받은 3개의 신호는 랜드마크 번호와 랜드마 크 내의 지역을 비교하여 로봇의 위치를 찾는다.. . (19). <그림 11> 거리측정센서의 순서 Fig.11 Arrangement of distance sensors 167.
(7) 정구철 : 유비쿼터스 네트워크에서 모듈형 모바일 로봇과 위치 인식 시스템을 위한 사례. 먼저 9개의 거리측정센서의 측정값 중에 최대 측정 값이 170cm 이내일 경우이다. 거리측정 센서를 이용 한 각도 측정을 하기 위해서는 전방, 우측과 좌측에 있는 거리측정 센서 중 어느 세트를 각도 측정에 이용 할 지 결정해야 한다. 따라서 3곳의 세트 중앙에 있는 거리측정 센서의 측정된 값 중 벽면에 가장 가까운 거 리측정 센서 세트를 각도 측정에 이용하도록 한다. 거 리측정 센서 선택은 다음 식 (23)와 같이 표현한다.. i f ≤ . . . . (23). . 여기서 는 각 세트에서 좌측, 중앙, 우측 센서를 나타내고, 는 각 세트를 나타낸다. 각도 측정에 이용할 거리측정 센서 세트가 선택되 면 벽면과 로봇의 각도를 측정한다. 이때 사용되는 거 리측정센서는 좌측센서 와 우측센서 를 이용한다. 다음 그림 12와 같이 두 센서가 측정한 거리 정보값을 이용하여 각도를 측정한다.. (24) 식 (24)를 삼각함수 덧셈정리를 적용하여 정리하 면 다음 식과 같다. . . (25). . . . . . (26). 식 (26)에서 삼각함수 역변환을 하면 을 구한다. . . . (27). 그림 12에서 와 는 15° 차이로 다음 식과 같 으며, 벽면 모바일 로봇의 각도를 측정할 수 있다.. . (28). Ⅴ. 시뮬레이션 센서들의 출력을 입력받을 수 있도록 하드웨어를 제작하고 테스트하였다. 그림 13은 컴퓨터에서 시리 얼 통신을 통해 센서들이 정보 값을 받고 있는 상태 를 나타낸다.. <그림 12> 거리측정센서를 이용한 각도 측정 Fig.12 The angle measurement using distance sensors 여기서 은 거리측정센서 우측 및 좌측 세트가 선택된 경우에 과 거리측정센서 세트의 좌측센서. 와 이루는 각도이다. 거리측정센서 중앙 세트를 선택한 경우에는 과 선택된 세트의 좌측센서 와 이루는 각도이다. 다음 식 (24)는 각 세트의 좌/우측 두 개의 거리 측정 센서를 이용하여 을 구하는 공식이다.. 168. <그림 13> 시리얼 통신을 이용한 센서들의 정보값 출력 Fig.13 Output of sensors using serial communication 그림 14는 모바일 로봇에 부착된 센서들의 값을 노트북을 통해 사용자가 쉽게 파악할 수 있도록 프 로그래밍 한 제어기 화면이다. 사용자는 이 프로그램 을 이용하여 노트북을 통해 모바일 로봇을 쉽게 제 어할 수 있고, 초음파 센서, 거리측정센서, 기울기 센 서, 위험 탐지 센서의 데이터를 한 눈에 볼 수 있다..
(8) 한국실천공학교육학회논문지 제 4 권 제 2 호 2012년 12월. 따라서 포토센서 한 개당 모바일 로봇의 직경보 다 넓은 지역을 담당하게 되어 로봇의 위치 오차가 발생한다. 그러나 발광다이오드 개수를 증가하면 오 차를 줄일 수 있다. 그림 17은 이러한 오차를 줄이기 위해서 모바일 로봇의 주행계와 모바일 로봇의 거리측정장치에서 계 산한 각도를 이용하여 위치 계산을 실행한 결과이다.. <그림 14> 모바일 로봇 제어 프로그램 Fig.14 Control program for mobile robot 모바일 로봇은 랜드마크를 기반으로 자신의 위치 를 인식한다. 그림 15는 모바일 로봇의 위치인식을 위한 프로그램을, 그림 16은 랜드마크 만을 이용하여 모바일 로봇의 위치 측정을 나타낸다.. <그림 17> 3가지 방법을 사용한 위치인식 Fig.17 Position recognition using 3 methods 3가지 경우를 사용한 방법이 랜드마크 경우만을 사용할 때보다 오차를 많이 줄여주었다. 또한 랜드 마크 중앙으로 이동할 경우에는 오차가 작지만 랜 드마크에서 멀어지면 오차가 많이 발생함을 알 수 있다.. <그림 15> 로봇의 위치인식을 위한 프로그램 Fig.15 Program for position estimation of the robot 이 경우 랜드마크에 사용된 포토센서의 발광다이오드 가 10개 밖에 되지 않으므로. 랜드마크의 발광부와 모바 일 로봇의 수광부가 2m인 경우, 하나의 랜드마크는 길이. 그림 18에 랜드마크만을 이용한 위치인식(그림 16)과 3가지 방법을 사용한 위치인식(그림17)의 오 차를 그래프로 표현하였다. 두 방법의 오차를 비교 해 본 결과 3가지 방법을 이용한 방법이 오차가 더 보정하는 것을 알 수 있다.. 가 2.3미터의 정사각형의 면적을 담당한다.. <그림 16> 랜드마크만을 이용한 위치인식 Fig.16 Position estimation using only landmark. <그림 18> 랜드마크와 3가지 방법 오차 비교 Fig. 18 Error comparison of landmark and 3 methods 169.
(9) 정구철 : 유비쿼터스 네트워크에서 모듈형 모바일 로봇과 위치 인식 시스템을 위한 사례. Ⅵ. 결 론 본 논문에서는 로봇이 다양하게 진화하여 향후 국 제적인 표준화가 이뤄질 경우 로봇에 여러 가지 기능 성 모듈을 탈부착 할 수 있는 방안을 검토하였다. 구 체적으로 기본형 로봇에 개별 사용자가 원하는 기능을 쉽게 부가할 수 있도록 제어기와 하드웨어를 모듈화 함으로써 실습자 및 사용자가 편리하게 이용할 수 있 는 방법을 제안하였다. 사용자에게 다양한 서비스를 제공하기 위해서는 먼 저 로봇 자신이 현재 위치를 인지해야 하며, 앞으로 움직이는 방향을 파악해야 한다. 이를 위해 본 논문에 서는 모바일 로봇에 다양한 센서를 부착하고 로봇이 자기의 위치를 인식하는 시스템을 연구하였다. 하나 의 랜드마크에 포토센서를 많이 장착하여 로봇의 위치 오차를 줄일 수 있지만, 시스템을 경제적으로 구축하 기 위해 적정의 포토센서만을 사용하고 로봇에 부착된 센서를 이용하여 오차를 보정하는 방법을 취하였다. 이는 현재 진행 중인 SLAM은 뛰어난 성능에도 불구 하고 하드웨어와 소프트웨어의 가격이 너무 비싸 실용 화가 어렵고 위치 인식 하드웨어 설치에 시간이 많이 걸린다는 점에 착안하여 구입이 용이하고 가격도 저렴 한 포토센서를 이용하여 로봇이 위치인식을 할 수 있 도록 함으로써 실습에 용이할 것으로 사료된다. 향후 본 연구 시뮬레이션에서 수행한 경로 선택 및 개선된 안내 알고리즘을 로봇에 적용하여 랜드마크 안 정성을 향상하는 방법을 연구하고자 한다. 참고문헌 [1] Y. Yamamoto and X. Yun, "Coordinating locomotion and manipulation of a mobile manipulator", IEEE Transactions on Automatic. Car-Like Wheeled Mobile Robot With Skidding and Slipping", IEEE Transactions on Control Systems Technology, Vol. 16, No2, 2008. [5] Chatterjee, A.; Matsuno, F., "A Neuro-Fuzzy Assisted Extended Kalman Filter-Based Approach for Simultaneous Localization and Mapping (SLAM) Problems", IEEE Transactions on Fuzzy Systems, Vol. 15, No. 5, pp. 984 - 997, 2007. [6] Soonshin Han, HyungSoo Lim, JangMyung Lee, "An Efficient Localization Scheme for a Differential-Driving Mobile Robot Based on RFID System", IEEE Transactions on Industrial Electronics, Vol. 54, No. 6, pp. 3362 - 3369, 2007. [7] SeungKeun Cho, JangMyung Lee and SukChan Shin, "A Dynamic Localization Algorithm for Mobile. networks",. IEEE. robot. using. Transactions. on. iGS. system",. [8] H. J. Chang, C. S. G. Lee, Y.-H. Lu, Y. C. Hu, "P-SLAM: Simultaneous Localization and Mapping With Environmental-Structure Prediction", IEEE Transactions on Robotics, Vol. 23, No. 2, pp. 281 - 293, 2007. [9] Chaomin Luo, Simon X. Yang, "A Bioinspired Neural Network for Real-Time Concurrent Map Building and Complete Coverage Robot Navigation in Unknown Environments", IEEE Transactions on Neural Networks, Vol. 19, No. 7, pp. 1279 - 1298, 2008. 정 구 철 (Goo-Cheol Jeong). 정회원. 1979년 2월 : 중앙대학교 전 자공학과(공학사) 1981년 2월 : 중앙대학교 대. neural. 학원 전자공학과(공학석사). Neural. 1988년 2월 : 중앙대학교 전 자공학과(공학박사). Networks, Vol. 9, No. 4, pp. 589 - 600, Jul. 1998.. 1982년 12월 ~ 1984년 3월 :. [3] Iuchi Ko. Hiroshi Niki, Murakami Toshiyuki, “Attitude Control of Bicycle Motion by Steering Angle and Variable COG Control”, IECON 2005. pp. 2065-2070, 2005. [4] Ghang Boon Low and Danwei Wang, "GPS-Based Path Following Control. for a 170. the. Mechatronics 2008, pp. 734-739, 2008.. [2] R. Fierro and F. L. Lewis, "Control of a mobile. using. International Conference on Advanced Intelligent. Control, Vol. 39, No. 6, pp. 1326-1332, 1994. nonholonomic. Robots. 기아자동차 연구소 연구원 1988년 3월 ~ 1991년 2월 : 동서울대학 전자과 교수 1991년 3월 ~ 현재 : 한국기술교육대학교 컴퓨터공학부 교수 <관심분야>. Electromagnetic Analysis/Modulatio. n․Demodulation System/E-learning.
(10)
수치

관련 문서
As for learning participation frequency, physical recognition, performance recognition, social recognition, and psychological recognition concerning on
Thus, as visual expansion interprets expressive characteristics applied for walls as physical structures by a visual and perceptual recognition system, non-materialization
The conventional routing protocols developed for mobile ad-hoc network (MANET) show low performance result when they are adapted in vehicular ad-hoc
For camera 1, comparison of actual vision data and the estimated vision system model’s values in robot movement stage, based on the EKF method(unit: pixel) ···.. The estimated
인공신경망 기법을 활용한 노심보호계통 축방향 출력분포 합성 방법은 축방향 출력분포 합성
Q: Why don’t we just use a prime number as our base N since it’s so easy to find the decryptor
A Study on the Evaluation of Space Recognition Space Recognition Space Recognition in the Space Recognition in the in the in the Concourse of Hospital using the
Key words : ground control point, GPS, world geodetic coordinate system, ITRF, GIS, UIS, LIS, ITS, Ubiquitous, triangulation point, geodetic control
