ISSN 1225-7842 / eISSN 2287-402X http://dx.doi.org/10.7779/JKSNT.2016.36.3.195
1. 서 론
와전류탐상검사 기법을 적용하여 스플라인 샤 프트 기어부에서 발생하는 미세결함을 검사할 때 스플라인 기어의 반복적인 표면 굴곡으로 인해 발생하는 표면신호의 주파수와 실제 균열에 의해
생성된 결함신호의 주파수가 주파수 대역 상에서 매우 가깝게 분포하여 표면신호로부터 결함신호 를 구분해내기가 쉽지 않다. 스플라인 기어의 규 칙적인 표면 굴곡은 와전류의 원리상 유사 사인 파 형태의 반복적 신호를 만들고 이 신호는 일반 적으로 센서의 결함신호와 근접한 주파수 스펙트
스플라인 기어부 결함의 와전류검사 신호처리에 관한 연구
Study on Signal Processing in Eddy Current Testing for Defects in Spline Gear
이재호*, 박태성**, 박익근**✝
Jae Ho Lee*, Tae Sung Park** and Ik Keun Park**✝
초 록 금속성부품의 자동화 생산라인 상에서 결함검사는 통상 시스템 가격이 합리적이고 고속검사가 가능
한 와전류검사(ECT, eddy current testing) 기법이 많이 사용된다. 이러한 금속성 피검사체 가운데 특별히 스플 라인 샤프트(spline shaft)의 스플라인 기어부(spline gear)와 같이 표면이 고르지 못한 피검사 대상에 대하여 ECT검사를 적용할 경우 주파수 분포도가 유사하면서 동시에 상대적으로 큰 표면신호로 인해 센서로부터 획 득한 원신호와 결함에 의해 발생한 신호를 분리해내기가 어렵다. 이러한 스플라인 기어부의 결함신호 검출을 용이하게 하기 위해서는 주변 잡음신호에서 결함신호만을 구분해낼 수 있는 고차필터의 구현이 필수적이고 동시에 각 생산라인과 피검사체의 상황에 따라 필터의 통과대역을 조절할 수 있어야 한다. 이러한 통과대역 조절이 가능한 고차필터 구현을 위해 디지털 방식 중 하나인 IIR (infinite impulse filter) 필터에 의한 구현방 안을 검토하고, 신호검출을 위해 시스템 레벨에서 설계요소들의 최적화를 통해 결함신호검출을 시도하였다.
주요용어: 스플라인 기어부, 와전류검사, 선형위상, 디지털필터, 와전류 센서
Abstract Eddy current testing (ECT) is commonly applied for the inspection of automated production lines of metallic products, because it has a high inspection speed and a reasonable price. When ECT is applied for the inspection of a metallic object having an uneven target surface, such as the spline gear of a spline shaft, it is difficult to distinguish between the original signal obtained from the sensor and the signal generated by a defect because of the relatively large surface signals having similar frequency distributions. To facilitate the detection of defect signals from the spline gear, implementation of high-order filters is essential, so that the fault signals can be distinguished from the surrounding noise signals, and simultaneously, the pass-band of the filter can be adjusted according to the status of each production line and the object to be inspected. We will examine the infinite impulse filters (IIR filters) available for implementing an advanced filter for ECT, and attempt to detect the flaw signals through optimization of system design parameters for detecting the signals at the system level.
Keywords: Spline Gear, Eddy Current Testing, Phase Linearity, Digital Filter, ECT Sensor
[Received: January 25, 2016, Revised: May 18, 2016 / June 15, 2016, Accepted: June 17, 2016] *서울과학기술대학 교 NID융합프로그램, **서울과학기술대학교 기계·자동차공학과, ✝Corresponding Author: Department of Mechanical and Automotive Engineering, Seoul National University of Science and Technology, Seoul 01811, Korea (E-mail:
ⓒ 2016, Korean Society for Nondestructive Testing
럼을 갖는다.
이렇게 주파수 스펙트럼 상에서 근접한 신호에 서 원하는 신호를 분리해내기 위해서는 차수가 매우 높은 필터를 구현하여야 하며 자동화 생산 라인의 다양한 택트타임(tact time)을 고려할 때 필터의 통과대역 가변성은 필수적이라고 할 수 있다.
와전류탐상 시스템에서 통상 잡음으로부터 결 함신호를 구분해내기 위해서는 디지털 필터를 많 이 활용하는데 디지털 필터는 크게 그 구현방법 에 따라 FIR(finite impulse filter)과 IIR(infinite impulse filter) 필터로 구분된다.
와전류탐상 시스템에서 디지털 필터를 구현하 는데 있어서 가장 중요한 설계요소 중 하나는 필 터의 위상응답특성이다. 와전류탐상 시스템에서 결함신호의 형태 또는 형태 변화가 어떤 종류의 결함인지를 판단하는 데에 중요한 정보를 내포하 고 있기 때문에 필터를 통과한 결함신호의 형태 가 필터를 통과한 후에도 보존되어야 한다. 본 연구에서는 이러한 위상응답 선형성을 고려하여 IIR 필터의 적합성을 확인하고자 하였다. 또한 결함신호를 용이하게 하기 위해 필요한 시스템 차원에서 센서의 설계요소 및 IIR 필터설계요소 를 포함한 시스템 차원에서의 최적화 방안을 검 토하였다.
2. 관련이론
2.1. ECT 결함신호 생성 원리
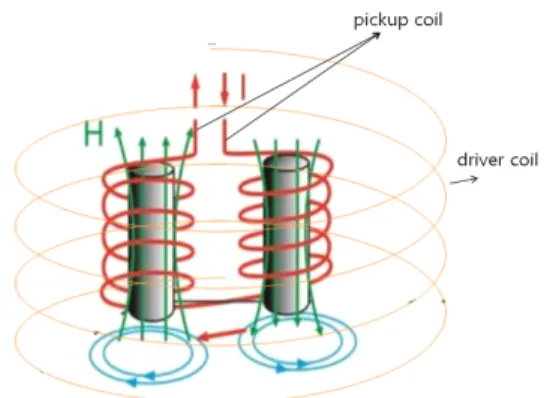
드라이브 픽업 차동 센서 (driver pickup differential sensor)를 적용한 와전류탐상 시스템을 채택하여 스플라인 샤프트의 스플라인 기어부에 대한 와전류검사를 수행할 때 결함신호가 생성되 는 과정은 센서의 기하학적 구조와 센서의 전자 기적 특성에 따른다.
드라이브 픽업 차동 센서의 구조는 Fig. 1에서 와 같이 2개의 센서 코일이 각각 원통형 코어의 둘레에 서로 반대방향으로 감겨있고 그 위로 드 라이버 코일이 감겨져 있는 형태를 갖는다. 이 때 드라이버에 연속파(continuous wave)를 인가하 면 드라이버 코일에 흐르는 전류의 변화에 따라 코일 내부에 자기장이 발생하고, 내부에 있는 두 개의 센서 코일들은 동일한 방향의 자기장에 영
향을 받아 서로 상쇄되는 전류를 발생시켜 센서 의 출력은 아무것도 없는 상태가 된다. 반면에 센서 코일의 어느 한쪽에 결함부위를 지나갈 경 우에는 결함부위로 인하여 피검사체에 흐르는 와 전류는 임피던스를 받게 되고, 이에 따른 와전류 의 변화는 곧 자기장의 변화로 변환되어 결국 드 라이버 코일 내부에 있는 두 센서 코일들 간의 자기장 분포 균형이 깨어진다. 그리고 이러한 미 세한 자기장 변화는 센서 코일에 순간적인 전류 로 변화되어 센서의 출력으로 나타난다[1].
2.2. 표면 신호와 결함에 의해 발생한 신호
스플라인 기어와 같이 규칙적 요철이 있는 표 면을 센서가 지나가면 유사 사인파 형태의 표면 신호를 발생시키는데 이는 일종의 규칙적으로 반 복되는 lift off 신호로 간주될 수 있다. Fig. 2에 서와 같이 센서의 첫 번째 코일의 중심부가 기어 이의 산 부분을 지날 때 센서와 스플라인 기어가 가장 근접하게 되어 가장 높은 레벨값을 갖게 되 고 센서의 다른 코일의 중심부분을 기어 이의 산 부분이 지날 때 반대로 가장 작은 레벨값을 갖거 나 가장 높은 레벨값을 갖는다. 즉 스플라인 기 어의 회전속도와 기어 이의 간격이 표면신호의 주파수를 결정함을 알 수 있다.
Fig. 2에서와 같이 스플라인 기어의 회전속도 (rpm)를 , 스플라인 기어의 간격을 , 그리고 스플라인부의 반지름을 이라고 하면 근사적으 로 표면신호의 주파수()는 다음과 같이 표현할 수 있다.
(1)
Fig. 1 Structure of driver pickup differential probe
이때 차동 센서 코어 중심축들 간의 간격을
이라고 하면 결함주파수 는 다음과 같이 근 사화 할 수 있다.
(2)
따라서 과 의 변수를 이용하여 주파수 영 역에서 표면신호의 주파수와 센서의 주파수 분리 를 시도할 수 있다. 그러나 은 통상 검사 대상 체의 크기가 고정되어 있기 때문에 은 센서의 크기를 결정하는 한 가지 요소가 되므로 그 값은 한정적 범위를 갖는다.
만약 과 이 같은 값을 가질 경우, 표면신 호의 주파수와 결함신호의 주파수가 거의 같게 되어 구분이 불가능하게 되고 신호처리를 통한 신호분리는 사실상 기대하기 어렵다.
과 의 비율 차를 크게 하기 위해서는 을 상대적으로 보다 크게 하는 방법이 있으나 센 서가 피검사체의 표면을 수직으로 지날 때 가장 이상적인 결함신호를 얻는다는 점 (센서 코일의 단면적과 센서 코일 내부로 들어오는 자속의 수 직 성분에 비례하여 센서신호가 발생)과 센서의 크기가 의 값에 영향을 받는 점 등에 의해 의 상한값이 제한되고 을 상대적으로 적게 할 경우 분해능은 좋아지지만 상대적으로 센서의 단 면적이 감소하여 받아들일 수 있는 자속수가 줄 어들게 되고 동일 신호를 얻기 위해서는 보다 많 은 권선을 해야 한다. 또한 스플라인 기어의 골 이 깊은 경우 골상에 발생한 결함에 대해 상대적 으로 신호의 감도가 낮게 된다. 따라서 을 작 게 하기 위해서는 코어 물질의 직경이 작아져야 하는데 이러한 코어의 직경을 줄이는데는 물리적 인 한계가 존재한다.
3. 실험장치 및 방법
3.1. 시험편 및 센서 설계/제작
본 연구에서 사용된 스플라인 기어 샤프트는 자동차의 구동부에 사용되는 부품으로 회전축에 대해 대칭구조를 지니고 있고 표면 굴곡이 규칙 적이어서 와전류탐상 방식을 적용한 고속결함진 단이 가능하다. Fig. 3은 실험에 사용한 동종의 스플라인 기어 샤프트이며 Fig. 4와 같이 비교시 험을 위해 스플라인 기어부의 임의의 기어 위에 방전가공을 이용하여 약 0.5 mm 크기의 인공결 함을 제작하였다. 스플라인 기어부와 기어 이 간 의 간격은 약 2 mm이고 스플라인 기어 샤프트 상에는 다른 연결부품들과의 체결을 위해 홀들이 있기 때문에 홀 신호의 영향을 최소화하기 위해 서는 센서의 직경이 작을수록 유리하다.
스플라인 기어 샤프트의 회전속도는 160 rmp 으로 유지한다고 가정할 때 스플라인 기어부의 직경이 30 mm, 제작된 센서 코어간의 간격 0.5 mm를 반영하여 결함주파수( )를 계산하면 약 500 Hz로 계산된다. 이때 실험에 사용한 시험편의 스플라인 기어 산 간의 간격이 2 mm인 점을 고려하면 스플라인 기어의 표면 굴곡에 의해 생성되는 표면신호( )의 주파수는 125 Hz로 계산된다.
3.2. IIR 필터 구현
대부분의 ECT 검사에서 디지털 필터의 구현은 필수적이다. 특히 범용 ECT와 같이 비교적 검사 속도가 빠르지 않고 임피던스의 변화를 민감하게 관찰하여 임피던스 변화의 양상에 따라 결함의 종류를 구분하는 경우, 위상의 선형성은 디지털 필터의 특성들 가운데 가장 중요하게 고려되어야 할 요소들 중 하나가 될 것이다. 이런 관점에서 FIR 필터는 ECT 시스템에서 디지털 필터의 또 다른 짝인 IIR 필터에 비해 태생적 우위를 점하 고 있다.
그러나 FIR 필터는 하드웨어 구현에 있어서 상 대적으로 과도한 하드웨어 리소스를 필요로 하고 스플라인 기어부 상에 위치한 크랙 검사에서와 같이 결함신호와 잡음신호가 주파수 영역에서 매 우 가까울 경우 보다 높은 차수의 필터를 구현하
Fig. 2 Repeated pattern of lift-off signal in spline gear
기 위해 불가피하게 FIR 필터의 탭 수를 늘려야 한다. 이러한 탭 수의 증가는 또 다시 하드웨어 리소스 사용을 가중시킨다. 더불어 스플라인 기 어 샤프트의 결함검사와 같이 라인 가동 중 고속 으로 여러 지점에 대해 동시에 검사가 진행되는 경우는 멀티 채널 시스템의 적용이 필요하게 되 는데 이에 따라 그만큼 하드웨어 리소스 사용이 증가하게 되고 동시에 계산양의 증가에 따른 시 간지연이 야기된다. 이러한 단점을 극복하고 실 시간 처리를 가능하게 하기 위해 시스템의 하드 웨어 리소스를 적게 사용하고도 FIR 필터와 유 사한 필터링 결과를 기대하기 위해 선형위상 IIR 필터를 설계하고 스플라인 기어부 비파괴검사에 의 적용 가능성을 확인하였다.
IIR 필터에서 선형성을 얻기 위해서는
의 조건을 만족시켜야 한다[2].
즉 -plain 극점과 영점들이 미러(mirror) 이미지 쌍으로 존재해야 해야 한다. 그러나 이러한 극점 과 영점들의 미러 이미지 쌍은 불가피하게 일부 극점과 영점들이 -plain 도메인 상에서 안정 영 역인 의 외곽에 존재하게 되어 필터의 출 력이 발산하거나 공진하는 등 불안전한 응답을 초래한다. 즉 원리적으로 IIR 필터는 선형적 위 상응답을 얻을 수 없다.
따라서 IIR 필터에서 안정성을 유지하면서 선 형위상 효과를 얻기 위해서는 필터의 위상 선형 성을 다소 희생하여 근사적 선형위상을 통해
접근해야 한다.
일반적으로 IIR은 아래와 같은 차분방정식의 형태로 표현될 수 있다[3].
(3)여기서 와 는 필터의 계수, 과
은 필터의 입력과 출력값이고 ≥의 관계를 갖는다. 또한 이에 대한 변환함수 H(z)는 아래와 같다.
(4)
즉 IIR 필터의 적절한 계수값들을 선택하여 IIR 필터의 필터특성을 조절할 수 있다[4]. 위의 IIR 필터는 다시 다수의 1차 또는 2차의 IIR 형 태로 분리하고 이들을 직렬형태로 연결하여 실제 설계에 적용하였다.
스플라인 기어 상의 인공결함 탐상을 위해 인 가한 160 rpm 조건으로부터 계산된 결함주파수가 500 Hz이고, 동시에 표면신호의 주파수가 125 Hz 이므로 표면신호를 억제하고 고주파 영역에서 원 치 않는 잡음의 영향을 최소화하기 위해서는 대 역통과필터의 적용이 필요하다.
디지털 필터를 구현하기 위해서는 우선적으로 샘플링 주파수를 고려해야 하는데 Nyquist- Shannon 샘플링 이론에 근거하여 디지털 영역에 서 스플라인 기어 상의 인공결함신호를 유지하기 위해서는 아날로그 결함신호보다 적어도 2배 이 상의 주파수로 샘플링을 진행하여야 하며 일반적 으로 보다 나은 해상도를 얻기 위해서는 5배 이 상의 샘플링을 적용하는 것을 고려하여 샘플링 주파수는 임의로 4.8 kHz로 설정하였다.
대역통과필터를 구현하기 위한 필터 설계 파라 미터들은 Table 1과 같이 설정하였다.
11개의 단위 블록으로 이루어진 IIR 필터를 2 차로 구성하였고 이를 직렬 연결하여 본 실험에 적용하였다.
Fig. 5(a)는 단위 IIR 필터의 블록 다이어그램을 나타내고 있는데 이와 같은 단위 블록 11개를 연 속적으로 직렬 연결함으로써 최종적으로 Fig.
5(b)의 형태와 같은 IIR 대역통과필터를 구현하였 Fig. 3 Photo of spline gear shaft used in filter test
Fig. 4 Photo of artificial defect fabricated by electric discharge machining
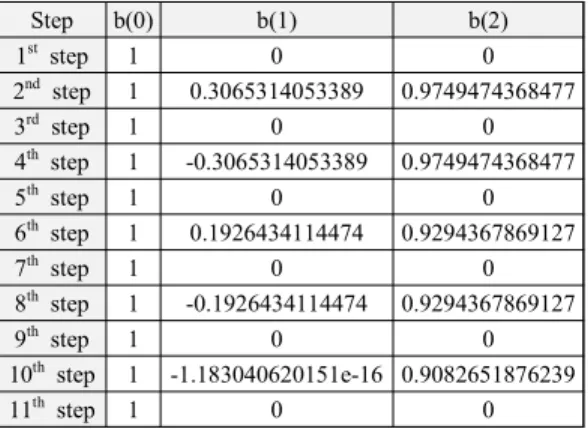
고 각각의 단위 2차 IIR 필터들에 대한 계수값들 은 Table 2와 Table 3에 제시하였다[5-7].
설계된 대역통과 IIR 필터를 Matlab 소프트웨 어를 이용하여 시뮬레이션을 수행한 결과 Fig. 6 에서와 같이 약 450 Hz에서 550 Hz의 통과대역 을 갖고 380 Hz 미만과 620 Hz 이상의 주파수에 서 대략 -80 dB 이상의 감쇄 특성을 확인할 수 있었다. 특히 필터의 위상응답특성곡선을 보면 450 Hz부터 560 Hz까지의 구간에서 유사 선형성 을 확인할 수 있고 결함주파수 성분이 500 Hz 주변에서 분포되어 있는 점을 고려할 때 본 연구 에서 구현된 IIR필터를 통해 신호처리 후 입력된 결함신호에 대해 동일한 형태의 출력신호를 기대 할 수 있다.
4. 실험결과 및 고찰
실험을 진행하기 위해서 드라이버 픽업 차동 센서를 Fig. 7(a)와 같이 제작하였고 센서 코어 간 간격을 0.5 mm로 유지하도록 하였다.
제작된 센서와 더불어 결함신호 및 표면신호의 생성을 위해서는 스플라인 기어 샤프트를 정속으 로 회전시킬 수 있는 장치가 필요하다. 이를 위 해 시험편을 고정한체로 정속회전이 가능한 지그 를 활용하였고(Fig. 7(b)), 측면에 위치한 센서 홀 더를 이용하여 센서를 고정시킨 뒤 센서 위치 조 절레버들을 이용하여 센서를 스프라인 기어부 상 의 인공결함 위에 위치시켰다. 시험편의 회전속 도를 160 rpm으로 설정 후 스플라인 기어 샤프 트의 시험편에 인위적으로 가공된 결함을 통해 결함신호를 포함한 표면신호를 Nortec 500 (OlympusNDT, Canada) 장비를 통해 취득하고 Table 1 Design parameters of band pass filter
Sampling frequency 4800 Hz Stop frequency 1 380 Hz Pass frequency 1 450 Hz Amplitude of stop band 1 -80 dB Stop frequency 1 620 Hz Pass frequency 1 550 Hz Amplitude of stop band 1 -80 dB
Fig. 5 Design process of IIR filter (a) direct form II block diagram of one 2nd order IIR filter (b) final filter diagram cascaded with 52nd order IIR filter elements
Table 2 Denominators of 2nd order IIR filter element
Step a(0) a(1) a(2)
1st step 0.2220970806095 0 0
2nd step 1 0.7629028563391 1
3rd step 0.2220970806095 0 0
4th step 1 -0.7629028563391 1
5th step 0.187876907896 0 0
6th step 1 1.091991901707 1
7th step 0.187876907896 0 0
8th step 1 -1.091991901707 1
9th step 0.1511197568663 0 0
10th step 1 0 -1
11th step 1 0 `0
Table 3 Numerators of 2nd order IIR elements
Step b(0) b(1) b(2)
1st step 1 0 0
2nd step 1 0.3065314053389 0.9749474368477
3rd step 1 0 0
4th step 1 -0.3065314053389 0.9749474368477
5th step 1 0 0
6th step 1 0.1926434114474 0.9294367869127
7th step 1 0 0
8th step 1 -0.1926434114474 0.9294367869127
9th step 1 0 0
10th step 1 -1.183040620151e-16 0.9082651876239
11th step 1 0 0
Fig. 6 Matlab simulation result of the designed IIR band pass filter
Fig. 7 Sensor signal generation (a) the drive pickup differential sensor designed for IIR filter experiment (b) ECT test device with a spinning specimen holder and a sensor holder
Fig. 8 Sensor signal acquired from the defect specimen at rotation speed of 160 rpm Nortec 500의 아날로그 출력신호를 NI PCI-6221 카드를 통해 읽어 들인 다음, LabView 소프트웨 어를 통해 구현된 IIR 대역통과필터의 성능을 확 인하였다. Fig. 8은 Nortec500에서 수집한 아날로 그 신호를 LeCroy WaveJet 324 (LeCroy, German) 를 통해 취득한 센서 신호이다. Fig. 8의 원형으 로 표시한 부분을 살펴보면 정상상태 120 Hz 표 면신호에서 노치형 결함에 의한 진폭치와 주파수 의 순간적인 변화를 확인할 수 있다.
여기서 취득된 표면신호의 주파수가 계산상으 로 예측된 값 125 Hz와 약간의 오차가 있으나 거의 예상된 패턴을 나타내었다.
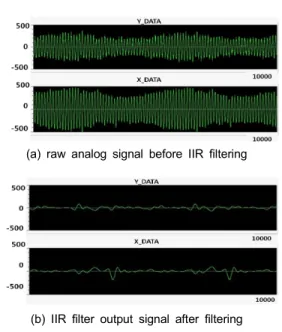
Fig. 9는 LabView 소프트웨어를 이용하여 구현 한 IIR 대역통과필터를 필터 적용 전과 필터 적 용 후의 신호 형태를 보여주고 있다. Fig. 9(b)에 서는 Fig. 9(a)에 존재하는 대부분의 표면신호가 필터에 의해 억제되고 결함에 의해 형성된 신호 만 획득할 수 있음을 보여주고 있다.
구현된 IIR 필터의 선형 위상실험은 근사적 임 펄스 신호를 획득하기 위해 동일한 rpm 조건하 에서 홀 신호를 적용하여 테스트를 진행하였고 Nortec 500 장비로 취득 후 필터 적용 전 신호와
(a) raw analog signal before IIR filtering
(b) IIR filter output signal after filtering Fig. 9 Filtering test results of the designed IIR filter
(a) raw analog signal at a hole
(b) the signal after IIR filtering
Fig. 10 Phase linearity test of IIR band pass filter
필터 적용 후 신호를 비교하여 신호의 형태 변화 여부를 확인하여 근사적 선형성 테스트를 진행하 였다. 선형위상이 아닐 경우 신호를 구성하는 각 주파수 성분들의 전파속도가 달라져 신호의 변형 을 예상할 수 있다. Fig. 10(a)는 Nortec 500 장비 로 취득한 신호에 대해 구현된 필터를 적용하지 않은 아날로그 신호를 나타내고 Fig. 10(b)는 IIR 대역통과필터를 적용한 뒤에 획득한 신호의 형태 를 나타내고 있다. 일부 고주파 성분에서 다소 감소가 보이나 전체적으로 신호의 모양은 보전됨 을 확인할 수 있다.
5. 결 론
스플라인 기어 샤프트의 스플라인 기어부에 대 한 크랙 결함 유무를 ECT기법을 적용하여 검사 할 경우, 센서가 대상 검사체와 직접적 접촉이 불필요하고 고속검사 및 자동검사가 가능하다는 이점이 있다. 그러나 스플라인 기어부의 규칙적 굴곡은 결함신호의 주파수와 매우 가까운 주파수 의 표면신호를 발생하므로 표면신호에서 결함신 호를 구분해 내기 위해서는 고차의 대역 제어가 용이한 디지털 필터 구현이 필수적이다.
본 논문에서는 이러한 스플라인 기어부에서 ECT검사가 효과적으로 진행될 수 있는 방안으로 시스템 구현에 있어서 효율적인 신호 분리방법을 제시하였고 그 구체적 방법 및 적용 결과는 아래 와 같다.
1) 스플라인 기어부의 표면신호와 결함신호의 주 파수 성분이 너무 가까우면 필터에 의한 물리 적 및 원리적 한계가 있으므로 적절한 센서 설계를 통해 스플라인 기어부의 표면신호와 결함신호를 1차적으로 분리하여야 한다. 즉 표면신호의 주파수 결정요인인 기어와 기어 간의 간격에 대비하여 차동 ECT 센서의 중심 축 간의 간격을 충분이 작게 함으로써 스플라 인 기어부 표면주파수와 결함주파수의 일차적 분리가 가능함을 보였다.
2) FIR 필터와 유사한 필터 성능을 구현하면서 하드웨어 리소스를 상당부분 줄일 수 있는 이 점이 있는 IIR 필터를 구현하여 디지털로 변 환된 ECT 신호의 분리가 가능함을 보였다.
3) IIR 필터가 FIR 필터에서와 같은 선형위상을 얻기는 이론적으로 불가능하나 근사적 선형위 상을 갖는 IIR 필터를 구현하여 FIR 필터와
성능적으로 거의 동일한 필터 성능의 구현이 가능하였다.
후 기
이 논문은 서울과학기술대학교 교내 학술연구 비 지원으로 수행 되었습니다[2015-0941].
참고문헌
[1] A. Nicolaide, "Electromagnetics," 3rd Ed., Transilvania University Press, Brasov, pp.
143-144 (2012)
[2] A. V. Oppenheim, R. W. Schafer and J.
Buck, "Discrete-Time Signal Processing," 2nd Ed., Prentice Hall, Upper Saddle River, New Jersey, pp. 306-307 (1989)
[3] M. Wickert, "Signals and Systems for Dummies," John Wiley & Sons, p. 165 (2013) [4] R. G. Lyons, "Understanding Digital Signal
Processing," 3rd Ed., Prentice Hall, Upper Saddle River, New Jersey, pp. 275-278 (2010) [5] L. Jackson, "Roundoff-noise analysis for fixed-
point digital filters realized in cascade or parallel form," IEEE Trans. Audio Electroacoustics, Vol. 18(2), pp. 107-122 (1970)
[6] J. F. Kaiser, "Some practical considerations in the realization of linear digital filters," Proc.
3rd Annual Allerton Conference on Circuit and System Theory, pp. 621-633 (1965)
[7] L. R. Rabiner and C. M. Rader, "Digital Signal Processing," Prentice Hall, Englewood Cliffs, New Jersey, p. 406 (1989)