Design and Implementation of Routing System Using Artificial Neural Network
1)
전체 글
1)
수치

관련 문서
스마트폰 셀카 렌즈를 이용할 때의 차이점에 대해 모둠별로 토의하고 셀카 렌즈의 구조와 빛의 경로 를 그려보자.. 스마트폰 망원 렌즈를 이용할 때의 차이점에
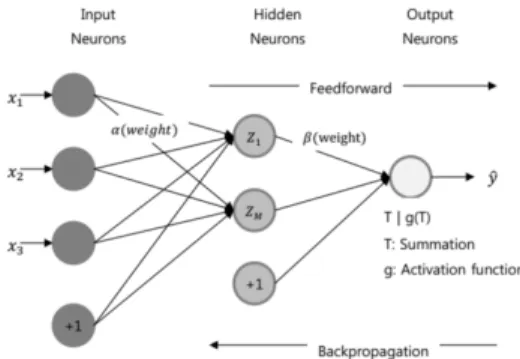
인공지능의 이미지 인식 알고리즘은 인간의 신경망처럼 시각 정보 처리를 담당하 는 신경망의 학습 알고리즘을 적용하여 인공신경망을 만들고 다양한 레이어층에서
또 다른 형태로는 QR-LPD라고 있는데요, 이 방식은 격벽으로 나뉘어져 있는 기판 사이에 극성 이 다른 흰색과 검은색 입자를 에어로졸 상태로 주입하고 전기장의 방향에
따라서 본 절에서는 Mathworks에서 제공하는 Deep Learning Toolbox의 Artificial Neural Network(ANN: 인공 신경망) 알고리즘을 이용해 Hot Swap 동작 시 발생하는
아래와 같이 엔트리봇에 실시간 소리 횟수를 말하는 프로그램을 작성하고 제어기에 내 장된 소리 인식 센서 ( 마이크 ) 를 이용하여 박수가 잘
제 2의 지구를 건설하기 위해서는 생물과 인간 이 살아갈 수 있는 조건을 만족시켜야 하며, 이런 조건을 만족시킬 가능성이 있는 구역을 골디락스 존이라 한다.. 즉
따라서 우리는 일상생활에서나 실험실에서 화학물질이 존재하는지 혹은 얼마나 많은 양이 있는 지를 쉽게 확인할 수 있는 장치를 만들 수 있다.. 우리 주변의 물질
Human Actions Tracking and Recogni tion Based on Body Parts Detection via Artificial Neural Network.. ○ 인공 신경망 ->