大 韓 土 木 學 會 論 文 集 第29卷 第1D 號·2009年 1月 pp. 33~40
交 通 工 學
횡단보도에서의 보행자의 임계간격추정 모형 구축
Building a Model to Estimate Pedestrians' Critical Lags on Crosswalks
김경환*·김대현**·이익수***·이덕환****
Kim, Kyung Whan
·
Kim, Daehyon·
Lee, Ik Su·
Lee, Deok Whan···
Abstract
The critical lag of crosswalk pedestrians is an important parameter in analyzing traffic operation at unsignalized crosswalks, however there is few research in this field in Korea. The purpose of this study is to develop a model to estimate the critical lag.
Among the elements which influence the critical lag, the age of pedestrians and the length of crosswalks, which have fuzzy characteristics, and the each lag which is rejected or accepted are collected on crosswalks of which lengths range from 3.5 m to 10.5 m. The values of the critical lag range from 2.56 sec. to 5.56 sec. The age and the length are divided to the 3 fuzzy vari- ables each, and the critical lag of each case is estimated according to Raff's technique, so a total of 9 fuzzy rules are estab- lished. Based on the rules, an ANFIS (Adaptive Neuro-Fuzzy Inference System) model to estimate the critical lag is built. The predictability of the model is evaluated comparing the observed with the estimated critical lags by the model. Statistics of R2, MAE, MSE are 0.96, 0.097, 0.015 respectively. Therefore, the model is evaluated to explain the result well. During this study, it is found that the critical lag increases rapidly over the pedestrian's age of 40 years.
Keywords :ANFIS, Unsignalized Crosswalks, Critical Gap, Neuro-Fuzzy
···
요 지
횡단보행자의 임계간격은 비신호 횡단보도에서의 교통운영분석에 중요한 파라메타이나 국내에서는 이 분야의 연구가 빈약 한 실정이다. 이에 본연구의 목적은 횡단보행자의 임계간격 추정을 위한 모형을 개발하는 데 있다. 이를 위해, 이 임계간격 에 영향을 미치는 인자들 중 퍼지적 성격을 가진 보행자 연령과 횡단보도의 연장, 거절되거나 수락되는 간격이 연장 3.5 m 에서 10.5 m 범위의 행단보도에서 수집되었다. 이들 횡단보도에서의 임계간격은 2.56초에서 5.56초 범위의 값을 보였다. 연 령과 횡단보도 연장이 각각 3개의 퍼지변수로 구분되고 각 경우에 대하여 Raff의 기법에 의한 임계간격이 추정되어 총 9개 의 퍼지규칙이 설정되었다, 이들 규칙에 기초하여 횡단보행자 임계간격을 추정할 수 있는 ANFIS모형이 구축되었다. 모형의 예측력은 실측치와 추론치를 비교함으로써 평가되었다. 결정계수 R
2와 오차 및 분산정도를 나타내는 척도인 평균절대 오차
(MAE)및 평균제곱근 오차(MSE)가 각각 0.96, 0.097, 0.015로 나타나 본 모형의 설명력이 높은 것으로 평가된다. 본 연 구의 과정에서 보행자의 연령 40세 이후 임계간격의 증가율이 높음을 볼 수 있었다.
핵심용어
: ANFIS,비신호 횡단보도, 임계간격, 뉴로-퍼지
···
1. 서 론
1.1
연구의 배경 및 목적
횡단보도는 교차로 또는 도로구간에 설치되어 보행자가 안 전하게 도로를 횡단할 수 있도록 하는 교통안전 시설물이다.
또한, 횡단보도는 단지(Block)을 연결해줄 뿐만 아니라 보행 자의 이동성과 신속성 측면에서 중요한 교통체계의 하나로 보행자 통행에 꼭 필요한 수단이다. 횡단보도는 크게 신호 횡단보도와 비신호 횡단보도로 나눌 수 있다.
비신호 횡단보도는 신호 횡단보도와는 달리 기계적인 설비
없이 안전표지판과 노면표시에 의존해 횡단을 하게 되는데 이중 가장 중요하게 작용하는 것이 보행자의 경험과 판단이 다. 횡단을 시도하려는 보행자는 차량과의 상충을 고려한 스 스로의 판단에 의해 횡단을 하게 된다. 이렇듯 정해진 규칙 에 따라 횡단하는 것이 아니다 보니 보행자에게 많은 위험 이 과중되는 것이다.
지난 수십년간 우리나라 교통정책은 자동차 중심의 교통 책이라 하여도 과언이 아니다. 교통이란, 자동차뿐만 아니라 통행의 주체가 되는 인간의 보행특성에 대해서도 많은 연구 가 이루어져야 하나 자동차에 밀려 이에 관한 연구가 미비
*정회원ㆍ경상대학교도시공학과교수·환경및지역발전연구소고문ㆍ공학박사 (E-mail : [email protected])
**정회원ㆍ전남대학교 건설환경공학부 부교수·공학박사 (E-mail : [email protected])
***경상대학교대학원도시공학과·석사과정 (E-mail : [email protected])
****경상대학교 대학원 도시공학과·석사과정 (E-mail : [email protected])
하였다. 지난해 경찰청 보행자 사고 유형별 통계(2006)를 보면 도로 횡단 중 사망 또는 사고가 전체 보행자 사고에 대해 각각 53.8%, 43.7%에 해당된다. 이는 교통시설이나 교통수단을 사용하는 계획에 있어 보행자특성이 반영되지 못한 결과로 해석된다. 현재 우리나라에서는 보행자 이동에 관한 연구가 보행신호시간 산정 및 속도 등에 그치고 있으 며 그나마 매우 부족한 실정이다. 비신호 교차로에서의 보 행자 횡단보도 시설과 관련된 기존 연구들을 살펴보면 다음 과 같다.
김상구(2003)는 USHCM(2000)에 준하여 보행자의 인지- 반응시간 2.5"와 보행속도 1.0m/초로 한방향 전체 차로폭을 횡단하는데 소요되는 시간을 보행자의 임계간격으로 산정하 였다. 이 임계간격과 Erlang계수를 적용한 모형식을 이용하 여 비신호 횡단보도의 횡단용량을 산정하였다. 전체적으로 접근교통량이 증가할수록 횡단보행자 용량은 감소하는 패턴 을 보이고, 양방향 차로수가 많을수록 횡단할 수 있는 보행 자의 용량은 감소하였다. 이는 보행자가 도로를 횡단하기 위 하여 필요한 임계간격 크기가 차로수가 많아질수록 커지고 이로 인해 접근교통량의 차간간격을 이용하여 횡단할 수 있 는 확률도 낮아진다고 분석하였다.
이슬기(2003)는 우리나라 비신호 교차로에서의 차량운전자 들의 교차로 유형별 각 이동류의 임계간격을 추정하였으며, 이 를 적용해 산출한 시거를 도로설계편람(2000) 및 AASHTO
(2001)
의 비신호 교차로 시거와 비교하였다.
Brewer(2005)
등은 중앙분리대까지의 일방향 도로상의 연
장 9.1m-16.8m의 비신호횡단보도에서의 누적분포 50%의 수 락간격은 5.1"-8.2"의 범위로 USHCM(2000)보다는 크게 작 은 값을 보이며 횡단거리가 증가할수록 수락간격은 증가하 는 것으로 나타났다.
USHCM(2000)
은 단일 보행자의 임계간격 산정을 위해 식
(1)
을 제시하고 있다.
(1)
여기에서
Tc=
단일보행자의 임계간격(초)
Sp=평균보행속도(m/초)
L =횡단보도연장(m)
ts=
보행자의 출발손실 및 소거손실 시간(초)
위에서 살펴본 바와 같이 국내 보행자들의 차로 횡단시의 임계간격에 대한 현장조사에 기초한 연구는 이루어 지지 않 은 상태로 이에 대한 연구가 요망된다. 이에따라 본 연구는 비신호횡단보상에서의 보행자의 간격수락행태를 조사하여 보 행자의 임계간격을 파악하고 이 임계간격을 추정할 수 있는 모형을 구축하는 것을 그 목적으로 한다. 이 연구를 통하여 추정된 비신호횡단보도상에서의 보행자임계간격은 비신호횡 단보도에서의 교통운영분석에 중요한 파라메터로 사용될 수 있을 것이다.
1.2
연구의 내용 및 방법
비신호횡단보도상에서의 보행자 임계간격을 추정할 수 있
는 모형 구축을 위해 두 가지의 모형이 검토되었다. 하나는 최근 교통공학분야에 적용되어 그 유용성이 검토된 적응형 뉴로-퍼지 추론체계(ANFIS: Adaptive Neuro-Fuzzy Inference
System)
이며 다른 하나는 회귀분석 기법을 적용하였다.
ANFIS
모형 구축을 위한 순서는 다음과 같다.
첫째, 보행자 임계간격의 결정에 영향을 미칠 것이라 예상 되는 여러 인자들 중 그 영향이 크며 퍼지화가 가능한 인자 를 선정한다.
둘째, 연구대상 내 비신호 횡단보도에서의 현장조사를 통 해 자료를 수집·분석한다.
셋째, 수집된 자료를 ANFIS에서 학습 가능한 입·출력 한 쌍인 형태로 학습용 데이터(Training Data)와 평가용 데이터
(Checking Data)로 나눈다.
넷째, 수집된 자료를 이용하여 ANFIS모형 및 회귀모형을 구축한다.
다섯째, 구축된 모형을 이용하여 보행자 임계간격을 추론 한다.
여섯째, 추론치와 실측치의 비교를 통하여 모형의 적합성 을 검토한다.
2. 적응 뉴로 - 퍼지 시스템 (ANFIS) 의 개요
뉴로-퍼지의 일종인 ANFIS는 Jang(1993)에 의해 제안된 인공 신경망에 기반을 둔 적응형 퍼지 추론 체계이다.
ANFIS
는 뉴럴네트웍의 특징인 자기 학습능력을 이용하여
퍼지 규칙부의 파라메타들이 최종출력에 추종하도록 학습될 수 있다. 주어진 학습데이터를 모사하기 위해 혼합형 알고리 즘을 사용하여 Sugeno형 추론시스템을 최적화한다. 이 알고 리즘은 인공 신경망(Artificial Neural Network)의 주요 구 성요소인 최소오차자승법과 기울기감소오차역전법(Back-
propagation Gradient Descent Method)
을 조합하여 사용한
다. 조건부의 비선형 멤버쉽 함수와 관련된 변수들은 학습과 정을 통하여 갱신된다.
본 연구에 적용된 ANFIS(Adaptive Neuro-Fuzzy Infer-
ence System)
퍼지 추론법은 Takagi-Sugeno 추론법으로 그
림 1은 퍼지추론 시스템을 그림 2는 ANFIS의 구조를 보여 준다.
ANFIS
모형에서의 소속함수 종류에는 11개가 있고 간단
한 형태의 소속함수로 삼각형함수(Triangular MF), 사다리꼴 형함수(Trapezoidal MF), 종형함수(Bell MF)와 가우시안함 수(Gaussian MF) 등이 있다. 본 연구에서는 종형함수가 사
Tc LSp ---+ts
=
그림
1. Takagi-Sugeno형의 퍼지추론 시스템
용되었고 각 변수에 대한 소속함수는 세 개로 설정하였다.
3. 영향인자 선정 및 자료수집
3.1.
보행특성
도로교통안전협회(1997)는 비신호 횡단보도에서 보행자 양 방향도로를 횡단할 시의 횡단행태로 다음의 3가지 형태를 제시하고 있다.
▶ 보행자는 도로의 좌우 양방향의 차량교통류에 대하여 충 분한 횡단수락간격(Acceptance Gap)이 있다고 판단될 때 횡단.
▶ 횡단하고자 하는 보행자는 횡단보도의 우측방향 차량의 흐름에 대하여 연속적으로 횡단간격이 생기리라 예상하 면서, 보행자와 근접해 있는 좌측방향 차량교통류의 횡단 간격이 충분하다고 판단될 때 횡단.
▶ 중앙분리대 대기공간이 있는 도로의 경우, 보행자는 좌측 교통류에 대하여 횡단간격이 주어진다고 판단될 때 횡단 을 시작하며, 우측간격이 발생할 때까지 기다리다가 횡단 간격이 발생하면 다시 횡단을 시작.
현장조사에서 중앙분리대 대기공간이 없는 도로에서도 보 행자들은 세 번째 형태를 나타내는 것으로 조사되어 본 연 구는 보행자들의 간격수락 행태에 기초하여 세 번째 행태의 한 방향 전체차로를 횡단하는 보행자의 임계간격 추정을 위 한 모형을 구축하였다.
3.2
도로횡단 영향인자 선정
우리나라 도시환경에서의 비신호횡단보도 횡단보행자의 임 계간격에 영향을 주는 주요 인자로는 횡단보행자의 인적속 성과 도로조건 등을 들 수 있다.
보행자 인적속성에는 성별, 연령, 통행목적, 보행속도, 직 업 등이 있으며 도로조건은 횡단보도연장, 교통량, 주변지역 등이 있다. 본 연구에서는 위의 영향인자 중 그 영향이 크 며 퍼지적 성격을 지닌 연령과 횡단보도 연장을 보행자 임 계간격 추정모형의 영향인자로 선정하였다.
3.3
입력변수의 분류
앞절에서 선정된 입력변수인 연령, 횡단보도 연장과 출력 변수인 보행자 임계간격에 대한 입력데이터 작성을 위해 이 들을 퍼지 변수로 분류 하였다. 본 연구에 적용될 입출력변 수들의 퍼지변수를 정리하면 표 1과 같다.
3.4
자료수집
본 연구에서는 횡단보도 이용자들의 개별 속성을 반영한 임계간격을 추정하기 위해 진주시 비신호 횡단보도를 대상 으로 보행자의 횡단행태를 조사하였으며, 편도 1, 2, 3차로 로 나누어 각각 다음의 조건에 맞는 조사 지점을 선정하여 조사하였다.
• 단일로 상의 비신호 횡단보도.
• 횡단보도 대기 및 횡단하려는 보행자수가 충분한 지점.
• 횡단측면에서 도로상 기타 시설물에 의해 횡단에 방해받 지 않는 지점.
• 1개 차로폭 최소 3.0 m 이상.
• 관측이 용이한 곳.
위의 조건을 고려한 진주시 비신호 횡단보도를 대상으로 조사지점을 선정한 결과 아래 표 2와 같이 3개 지점을 선 정하였으며, 2007년 9월에서 11월까지 3개월간 각 조건에 맞는 자료를 수집하였다.
각 지점에서의 초시계를 이용한 현장조사를 통하여 횡단보 도 연장 및 수락간격과 거절간격을 조사하였다.
자료수집 과정에서 무리를 지은 보행자집단의 경우, 맨 앞 줄 첫 번째 보행자를 기준으로 자료를 수집하였다.
3.5
자료 분석
현장조사에서 수집된 횡단보도 보행자의 연령, 횡단보도 연 장 그리고 보행자의 횡단 수락과 거절(수락간격과 거절간격) 에 대한 자료를 분석하여 임계간격을 구하였다. 임계간격을 구하는 과정을 그림 3을 통해 설명하면 다음과 같다.
보행자가 도착과 동시에 1번 차량에 영향을 받아 횡단정 지선에 정지하였다면 거절로, 도착과 동시에 횡단을 하였다 면 수락으로 나누었으며, 수락한 경우 보행자의 도착부터 1 번 차량이 횡단보도를 통과하는 시간을 관측한 후 수락간격 의 크기를 구하였다.
결정론적 간격수락 마라메터의 추정에서 운전자 모집단이 동질성(homogeneity)과 일관성(consistency)을 가진 것으로 가정하는 것은 비현실적이지만, Troutbeck과 Brilon(2002)은 그림
2. ANFIS구조
표
1.입출력 퍼지변수의 분류
입력변수 퍼지변수
영향인자
연령 연령이 적다.
연령이 중간이다.
연령이 많다.
Young Middle Old
횡단보도 연장 연정이 짧다 연장이 중간이다.
연장이 길다
Short Middle
Long
임계간격 보행자
임계간격이 짧다 임계간격이 중간이다
임계간격이 길다
Short Middle
Long
표
2.자료조사 지점
조사지점 지점 명 차로 수
지점 1 진주 의료원 앞
1차로
지점 2 겔러리아 백화점 앞
2차로
지점 3 하대 홈플러스 앞
3차로
동질성은 용량을 감소시키는 반면 일관성은 용량을 증가시 켜 서로 상쇄되므로 결정론적 간격수락 파라메타의 사용을 정당화 했다. 이 연구결과에 기초하여 본 연구에서는 임계간 격 추정의 전통적인 기법인 Raff(1950)의 기법을 이용하여 임계간격을 추정하였다.
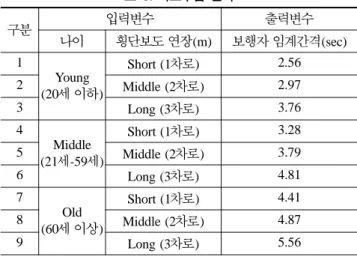
자료수집은 퍼지변수 조건에 맞게 설정하였으며 총 9가지 조건을 설정하여 조사하고 임계간격을 추정하였다. 자료수집 의 결과는 표 3과 같으며 전체 보행자의 임계간격은 2.56”-
5.56”
의 범위의 값을 보여 USHCM(2000)의 5.91”-11.75”보
다 크게 작은 값을 보였다. 나이와 임계간격간의 관계에서 나이가 적은 그룹의 임계간격은 3.10”인데 비하여 나이가 많 은 그룹은 4.95”로 1.85”의 차이를 보였으며, 횡단보도연장 과 임계간격간의 관계에서는 연장 1차로의 임계간격은 3.42”
인데 비하여 3차로는 4.7”로 1.29”의 차이를 보였다.
4. 임계간격예측 모형 구축
4.1 ANFIS
기반 모형
4.1.1
모형의 정립
모형을 분석하기 위한 시스템 환경은 Matlab 7.1을 사용 하였으며 Matlab Toolbox를 이용하여 인공신경망과 뉴로-퍼 지 시스템의 학습 및 테스트를 수행하였다.
보행자 임계간격 예측 모형을 설정하기 위하여 연령과 횡 단보도 연장을 입력변수 하여 직접 추론하였고 이렇게 구축 된 모형의 보행자 임계간격 추론치와 실측치를 비교 하여 모형의 예측력을 검정하였다.
4.1.2 ANFIS
구조의 설계
ANFIS
구조를 설계하기 위해서 우선 Matlab Command
Line
으로부터 ANFIS Editor GUI를 시작한다. 학습용 데이 터(Training data; 입출력 데이터 쌍으로 이루어진 각 행의 마지막열 값이 출력이다)와 평가용 데이터(Checking data;
학습용 데이터의 적합한 모델을 위해 잠재적으로 통제하기 위한 데이터 행렬)를 불러오면 그림 4와 같다.
학습용 데이터와 평가용 데이터는 입출력 한 쌍의 데이터 로 구성되어 있으며 이 데이터들의 집합은 반복된 학습과정 을 거쳐 퍼지추론 시스템의 최상설계를 위한 멤버쉽 함수 파라메터를 조정하는데 사용된다.
본 연구에서의 퍼지 규칙의 수는 9개, 노드의 수는 35개 이다. ANFIS에서 제안된 혼합형 학습규칙은 주어진 학습 데이터 집합에 대하여 결론부 선형 변수들을 최소오차자승 기법으로 구한 후, 결정 된 선형 변수 값들에 대하여 오차 의 변화율을 입력부로 역전시켜 비선형 변수 값들을 최급강 하법으로 찾는 것이며 최종 오차가 설계 범위에 도달 할 때 까지 혹은, 정해진 횟수만큼 반복하여 ANFIS를 학습한다.
위에서 9개의 퍼지규칙(Fuzzy Rule)은 아래와 같으며, 표
4와 같다. 출력변수 Outmf1-Outmf9는 각 조건에서 조사된 보행자 임계간격의 값이 적용되었다.
R1 : IF
연령 is Young and 횡단보도 연장 is Short THEN
보행자 임계간격 is Outmf1
R2 : IF
연령 is Young and 횡단보도 연장 is Middle THEN
보행자 임계간격 is Outmf2
R8 : IF
연령 is Old and 횡단보도 연장 is Middle THEN
보행자 임계간격 is Outmf8
R9 : IF
연령 is Old and 횡단보도 연장 is Long THEN
그림
3.임계간격 분석도
표
3.자료수집 결과
구분 입력변수 출력변수
나이 횡단보도 연장(m) 보행자 임계간격(sec)
1Young (20
세 이하)
Short (1
차로)
2.562 Middle (2
차로)
2.973 Long (3
차로)
3.764
Middle (21
세-59세)
Short (1
차로)
3.285 Middle (2
차로)
3.796 Long (3
차로)
4.817
Old (60
세 이상)
Short (1
차로)
4.418 Middle (2
차로)
4.879 Long (3
차로)
5.56그림
4. ANFIS Editor GUI표
4. Fuzzy제어 규칙
Rule
입력변수 출력변수
나이 횡단보도 연장 보행자 임계간격
1Young
Short Outmf1
2 Middle Outmf2
3 Long Outmf3
4
Middle
Short Outmf4
5 Middle Outmf5
6 Long Outmf6
7
Old
Short Outmf7
8 Middle Outmf8
9 Long Outmf9
보행자 임계간격 is Outmf9
본 연구에서 소속함수 편집기를 사용한 입력변수의 종모형 멤버쉽 함수를 표현하면 그림 5와 같다. 가로축은 기저변수 라 하고 정량화된 값을 갖고, 세로축은 퍼지 소속도(Degree
of relationship)
로서 0과 1사이의 값으로 나타나며 기저변수
의 한 임의의 값에 대한 어의 변수의 정도를 나타낸다.
본 연구에 적용된 ANFIS의 구조는 그림 6과 같다.
4.1.3 ANFIS
학습
ANFIS
학습을 위해 이용 가능한 방법은 두 개의 상이한
알고리즘을 사용하는 Hybrid(Least Square Method와 Error
Back-propagation
의 혼합)방법과 오차역전파(Error Back-
propagation)
방법 두 가지가 있다. Hybrid 방법은 주어진 학
습 데이터 집합에 대하여 결론부 선형 변수들을 최소자승법
(Least Square Method)
으로 구한 뒤, 결정 된 선형 변수값
들에서 오차의 변화율을 입력부로 역전시켜 비선형 변수값들 을 최급강하법(Gradient Descent)으로 찾는 것으로서, 정해진 학습 횟수(Training Epochs)만큼 반복 또는 최종 오차가 설 계범위(Error Tolerance)에 도달할 때까지 학습하게 된다.
본 연구에서는 관측자료 3,600개를 각각 1800개인 입·
출력집합의 학습용 데이터와 평가용 데이터로 나눈 후
Hybrid
방법을 이용하여 학습하였고 학습횟수는 최종 오차
설계범위에 도달하는 100회로 하였으며 그 결과는 그림 7 과 같다.
4.1.4
멤버쉽 함수의 검토
ANFIS
를 이용하여 생성된 두 개의 입력변수의 멤버쉽 함수
들은 그림 8와 같다. 연령 변수의 경우 ‘중간이다’ 집합의 멤 버쉽 함수의 기울기가 다소 완화 되었다는 점을 제외하고는 대체로 거의 변화가 없었고, 횡단보도 연장변수의 경우 ‘연장 이 길다’ 집합의 멤버쉽 함수의 폭이 넓어졌음을 볼 수 있다.
그림 9과 10은 연령과 횡단보도에 대한 보행자 임계간격 과의 관계를 나타내었다. 연령이나 횡단보도 연장이 증가함 에 따라 임계간격이 증가함을 볼 수 있으며 연령 40세 이 후 증가율이 높음을 볼 수 있다.
4.2
회귀분석모형
4.2.1
모형설정
그림 9, 10에서 보는 바와 같이 연령 및 횡단보도 연장과 임계간격이 선형관계를 보이므로 연령과 횡단보도 연장을 독 그림
5.입력변수의 멤버쉽 함수
그림
6. ANFIS구조
그림
7. ANFIS학습결과
그림
8.학습된 입력변수의 멤버쉽 함수
립변수로 한 보행자 임계간격 추정을 위한 회귀모형을 설정 하였으며 그 식은 식 (2)와 같다.
Y=α+βx1+γx2 (2)
여기서 Y : 보행자 임계간격
x1 :연령
x2 :
횡단보도 연장
α :상수
β : x1
의 계수
γ : x2의 계수
4.2.2
모형의 계수 추정
표 3의 자료수집결과에 입력변수들의 평균치를 사용하는 총 9개의 자료를 사용하여 식 (2)의 회귀분석을 수행한 결 과는 표 5와 같다. 이 모형은 유의 확률 5% 이내로 유의 한 것으로 나타났으며, R
2값이 0.876으로 설명력이 높은 것 으로 평가된다.
4.3
모형의 평가
4.3.1 ANFIS
모형 평가
설정된 적응 뉴로-퍼지 모형의 적용여부를 판단하기 위해 사례분석을 통한 적응 뉴로-퍼지 모형의 적합성을 검토할 필 요가 있다. Matlab 7.1에서 ANFIS를 학습시키면 그림 11과 같은 Rule Viewer를 볼 수 있다. Rule Viewer는 읽기 전용 도구로써 퍼지 추론 시스템을 진단·분석하는데 사용된다
본 연구에서는 비신호 횡단보도에서의 수집자료에 기초하
여 9가지의 CASE를 설정하였고, 9개 CASE의 연령과 횡단 보도 연장에 대해 위의 그림 11과 같은 입력방법을 통해 임 계간격의 추론치를 구하면 표 6과 같다.
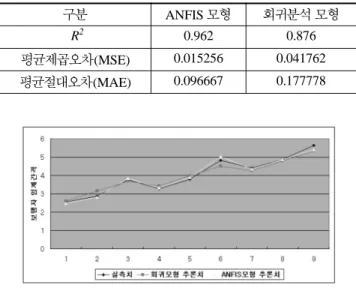
표 6의 실측치와 추론치를 플로트하면 그림 12와 같으며 실측치와 추론치가 매우 근사함을 볼 수 있다.
표 6의 9개 CAES를 이용하여 퍼지 근사 추론 모형의 예측력을 분석하였다. 모형의 예측력 분석은 결정계수 R
2와 평균절대오차(MAE) 그리고 평균제곱오차(MSE)의 통계적 분 석을 통하여 모형의 적합도와 모형의 오차를 측정하였다. 통 계적 검정결과는 표 7에서 보는 바와 같이 R
2가 0.96이상으 로 모형의 예측력이 매우 높게 평가된다.
4.3.2
두 모형의 비교
구축된 ANFIS 모형과 회귀분석모형의 예측력을 비교하였 그림
9.연령과 보행자 임계간격의 관계
그림
10.횡단보도 연장과 보행자 임계간격과의 관계
표
5.회귀분석 결과
변수 회귀계수
R2유의학률
α
1.1070.876 0.000
β
0.031γ
0.234그림
11. Rule Viewer표
6. ANFIS모형의 추론 결과 구분 나이 횡단보도 연장 임계간격
실측치 임계간격 추론치
CASE 1 22 3.5 2.56 2.5
CASE 2 40 3.5 2.97 2.83
CASE 3 57 3.5 3.76 3.85
CASE 4 22 7 3.28 3.34
CASE 5 40 7 3.79 3.9
CASE 6 57 7 4.81 5.02
CASE 7 22 10.5 4.41 4.37
CASE 8 40 10.5 4.87 4.86
CASE 9 57 10.5 5.65 5.4
그림
12. ANFIS모형의 실측치와 추론치의 비교
으며 그 결과는 표 8과 같다. 그림 13은 표 6의 9개의
CASE에 대하여 두 모형의 추론 결과를 나타낸 것이다.
ANFIS
모형과 회귀모형을 이용하여 구축된 보행자 임계간
격 추정모형의 예측력 평가는 표 8에 나타난 것과 같이 실 측치와 추론치간의 9개 CASE에 대해 두 모형 모두 양호한 예측결과를 보이고 있다. 그러나, 그림 13에 나타난 것과 같 이 두 모형의 추론 결과 측면에서만 본다면, ANFIS를 이용 한 모형이 회귀분석을 이용한 모형보다 추론치가 실측치에 더욱 근접한 것을 볼 수 있고, 표 8에서 보는 바와 같이
R2값에서도 ANFIS를 이용하여 구축된 모형이 크게 높음을 볼 수 있다. 이에 따라 ANFIS 모형의 예측력이 우월한 것 으로 평가된다.
5. 결 론
보행자 및 차량이 많지 않은 다수의 횡단보도가 비신호로 운영되고 있다. 이들 비신호횡단보도에서의 과학적 교통운영 분석을 위해서는 횡단 보행자들에 대한 신뢰할 수 있는 임 계간격의 추정이 요구되나 국내에서는 이에대한 연구가 거 의 이루어지지 않았다.
본 연구에서는 다양한 연령과 1-3개 차로 범위의 횡단보도 연장에 대하여 보행자가 횡단을 시작할 때 수락 또는 거절하 는 간격분포를 조사하여 횡단보행자의 임계수락간격이 추정 되었으며 그 값은 2.56“-5.56”의 넓은 범위의 값을 보였다.
이들 자료에 기초하여 연령과 횡단보도 연장에 따른 보행자 임계수락간격 추정을 위한 모형이 구축되었다.
본 연구에서는 횡단보행자와 차량과의 관계에서 임계간격 에 영향을 미치는 인자들 중 퍼지적 성격을 가진 연령, 횡
단보도 연장과 보행자 임계수락간격을 이용하여 ANFIS 모 형이 구축되었고, 회귀분석 모형을 이용하여 비교 검정되었 다. 이렇게 구축된 모형의 예측력은 검증자료를 이용한 실 측치와 추론치를 비교함으로써 평가되었다. 예측력 평가는, 결정계수 R
2과 오차 및 분산정도를 나타내는 척도인 평균절 대오차(MAE)와 평균제곱근오차(MSE)를 통하여 적합성을 평가하였다. 평가 결과 ANFIS 모형은 그 값들이 0.96,
0.097, 0.015
로 나타났으며, 회귀분석을 이용한 모형은 0.87,
0.178, 0.042
로 나타났다. 두 모형 모두 설명력이 우수한 것
으로 나타났으나, ANFIS를 이용한 모형의 설명력이 높은 것으로 평가된다. 또한 각 모형의 추론치와 실측치간의 비교 에서도 ANFIS를 이용한 모형이 더욱 실측치에 근접함을 볼 수 있었다. 보행자의 연령과 임계간격간의 관계에서는 연령
40세 이후 임계간격의 증가율이 높음을 볼 수 있었다.
본 연구의 결과는 비신호횡단보도에서의 교통운영 분석 의 기초자료를 제공하고 운영에 있어 더욱 효율을 증대시키는 데 활용될 수 있을 것으로 기대된다.
본 연구에서는 모형 구축에 있어 연령과 횡단보도 연장 그리고 임계간격을 변수로 모형을 구축하였으나, 차후 연구 에서는 연령뿐만 아니라 교통량 및 통행약자와 같은 다양한 보행자의 특성을 반영할 수 있는 변수가 고려되어진 횡단보 행자 임계수락간격에 관한 연구가 수행된다면 비신호횡단보 도 또는 교차로에서의 서비스수준 또는 용량의 정확한 분석 에 기여할 수 있을 것으로 기대된다.
참고문헌
강일환(2005) 뉴로 퍼지와 뉴로 유전자 알고리즘을 이용한 상수 도
1일 급수량 예측. 박사학위논문, 전남대학교.
건교부(2001) 도로용량편람. 사단법인 대한교통학회.
김경환 등(2006) 강우 및 밝기에 따른 신호교차로 포화차두 분 석에의 적응 뉴로-퍼지 적용, 대한토목학회논문집, 대한토목학 회, 제26권 제4D호, pp. 171-178.
김상구(2003) 중앙분리대 대기공간이 있는 비신호 횡단보도에서 의 보행자 횡단용량 모형식 개발. 대한교통학회지, 대한교통 학회, 제21권 제4호, pp. 103-111.
김찬호(2002) 임계간격 추정기법에 관한 연구. 석사학위논문, 중 앙대학교.
도로교통안전협회(1997) 교통신호기 설치기준 연구. p. 23.
도철웅(2004) 교통공학원론
(상
).청문각.
박종진 등(2001) 퍼지 제어시스템. 교우사.
서의훈(2002)
SPSS 10.0한글판을 이용한
SPSS통계분석. 自 由아카데미.
오창석(2000) 뉴로 컴퓨터. 내하출판사.
원제무(1999) 도시교통론. 박영사.
이광용 등(1997) 퍼지이론 및 응용
I, II.홍릉과학출판사.
이슬기(2003) 임계간격을 이용한 비신호 교차로 시거 산정에 관 한 연구. 대한교통학회지, 대한교통학회, 제21권, 제5호, pp.
97-110.
이현엽 등(1999)
MATLAB을 이용한 퍼지
-뉴로. 도서출판 아진.
장덕명(1998) 보행자 횡단보도 설치기준에 과한 연구. 연구보고 서. 도로교통안전관리공단, 98-16-345.
최경조(2001) 유전 알고리즘과 퍼지 클러스터링을 이용한 퍼지 규칙의 자동 생성. 석사학위논문, 충북대학교.
Al-Ghamdi, A.S. (1978) Entering headway for through movement at urban signalized intersections, TRR, pp. 42-47.
Branston, D. (1979) Some factors affection the capacity of signal- ized intersections, Traffic Engineering and Control, Vol. 20, pp.
표
7. ANFIS모형의 예측력 평과결과
구 분 검 정 결 과
R2 0.9624979
평균제곱오차(MSE)
0.1822평균절대오차(MAE)
0.111156표
8. ANFIS모형과 회귀분석모형의 예측력 비교
구분
ANFIS모형 회귀분석 모형
R2 0.962 0.876
평균제곱오차(MSE)
0.015256 0.041762평균절대오차(MAE)
0.096667 0.177778그림
13.모형의 추론 결과 비교
390-396.
Fuzzy Logic Toolbox for Use with Matlab User's Guide Version 2.0 (2000) The MathWorks, Inc.
Hahn, B.D.
저, 황성호 역(2005)
(엔지니어를 위한
) MATLAB엣센스. 아진.
Hines, J.W. (1997) Matlab Supplement to Fuzzy and Neural Approaches in Engineering, John Wiley & Sons, Inc.
Jang, J.R.S. (1997) Neuro-fuzzy and Soft Computing : A computa- tional Approach to Learning and Machine Intelligence. Engle- food Cliffs, NJ: Prentice-Hall.
Raff, M.S. and Hart, J.W. (1950) A volume warrant for urban stop signs, The Eno Foundation for Highway Traffic Control, Saug- atuck, Conn., U.S.A.
Salter, R.J. (1980) Highway Traffic Analysis and Design. Mac- millan Education, pp. 156-162.
Troutbeck, R.J. and Werner Brilon (2002) Chapter 8: Unsignalized Intersection Theory, Revised Monograph on Traffic Flow The- ory.
(