방향 측정 RFID를 이용한 로봇 이동 시스템
김 명 식 , 김 광 수*
RFID Based Mobile Robot Docking Using Estimated DOA
Myungsik Kim , Kwangsoo Kim* 요 약
본 논문은 RFID를 이용한 이동 로봇의 목표물 탐지 및 이동 시스템에 대해 소개한다. RFID는 전파를 이용하 여 원거리에서 비접촉식으로 정보를 전달하는 것이 가능한 인식 시스템으로 RFID를 통해 로봇은 비전 등 다른 시스템의 도움 없이 간단하게 주변 물체를 인식하는 것이 가능하다. 하지만 실제 작업을 하기 위해서는 인식한 물체로 이동해야 하지만 현재의 RFID 시스템은 위치 정보를 제공하지 않는 문제가 있다. 본 논문에서는 전파의 도래 방향을 이용한 로봇 이동 시스템을 제안한다. 제안한 시스템은 두 축 안테나를 이용, 목표물에 부착된 RFID 태그로부터의 수신된 전파의 크기 차이를 이용하여 도래 방향을 측정한다. 로봇은 측정 방향으로 이동하는 것으로 지도나 기준 스테이션 등의 다른 시스템 없이 간단하게 물체로 이동하는 것이 가능하다. 하지만 전파는 금속이나 액체 등 주변 환경에 의해 쉽게 영향을 받아 측정 방향에 오차가 발생, 주변 장애물이 많은 복잡한 환경에서는 이동에 실패하는 문제가 있다. 이러한 문제를 해결하기 위해 본 논문에서는 g-filter 기반 오차 보정 알고리즘을 개발하였다. 개발한 알고리즘은 현재 측정값과 이전의 보정값의 분산값들의 차이를 이용, 현재의 측정값에 포함되 어 있는 오차를 낮춤으로써 로봇이 방향을 잃지 않고, 이동하는 것을 가능하게 하였다. 시뮬레이션 및 실제 로봇 을 이용한 실험 결과는 복잡한 환경에서도 로봇이 성공적으로 이동하는 것을 보여준다.
Key Words : RFID, DOA estimation, g-filter, Two-directional antenna, Robot docking
ABSTRACT
This paper describes RFID(Radio Frequency Identification) based target acquisition and docking system.
RFID is non-contact identification system, which can send relatively large amount of information using RF signal. Robot employing RFID reader can identify neighboring tag attached objects without any other sensing or supporting systems such as vision sensor. However, the current RFID does not provide spatial information of the identified object, the target docking problem remains in order to execute a task in a real environment.
For the problem, the direction sensing RFID reader is developed using a dual-directional antenna. The dual-directional antenna is an antenna set, which is composed of perpendicularly positioned two identical directional antennas. By comparing the received signal strength in each antenna, the robot can know the DOA (Direction of Arrival) of transmitted RF signal. In practice, the DOA estimation poses a significant technical challenge, since the RF signal is easily distorted by the surrounded environmental conditions. Therefore, the robot loses its way to the target in an electromagnetically disturbed environment. For the problem, the g-filter based error correction algorithm is developed in this paper. The algorithm reduces the error using the difference of variances between current estimated and the previously filtered directions. The simulation and experiment results clearly demonstrate that the robot equipped with the developed system can successfully dock to a target tag in obstacles-cluttered environment.
※ 이 논문은 2011년도 교육과학기술부의 재원으로 첨단의료기기사업본부-신기술융합형 성장동력사업의 지원을 받아 수행된 연구임 (2011K000706)
주저자:서강대학교 미래기술연구원, [email protected], 정회원
* 서강대학교 전자공학과, [email protected], 정회원
논문번호:KICS2012-03-158, 접수일자:2012년 3월 31일, 최종논문접수일자:2012년 8월 6일
Ⅰ. 서 론
실제 환경에서 로봇이 작업을 수행하기 위해서는 주변 환경을 이해하고, 작업에 필요한 물체의 위치 로 이동하기 위한 시스템이 필요하다. 로봇 자체의 기능을 발전시키는 한편 최근의 센서 및 네트워크 기술의 발전을 통해 RFID나 무선 통신이 가능한 센서 등을 공간에 분산시켜 로봇이 이해하기 쉬운 환경을 제공함으로써 간단한 로봇으로도 복잡한 작 업이 가능하게 되었다[1,2]. 이러한 환경 하에서 정보 단말을 가진 로봇은 전파에 실려 오는 신호를 읽는 것만으로도 간단하게 주변 환경 정보를 취득하는 것이 가능하다. 하지만 실제 작업을 하기 위해서는 필요한 물체 위치로 이동해야 하지만 대부분의 전 파 기반 인식 시스템은 위치 정보를 제공하지 않기 때문에 위치 인식 및 이동 문제가 여전히 남아 있 다.
비전 기반 시스템[3,4]은 눈과 유사하게 카메라를 이용하여 취득한 영상으로부터 필요한 정보를 추출 하여 이용하는 것으로 주변 환경에 대한 풍부한 정 보 제공이 가능한 장점이 있다. 하지만 주변 광원의 변화에 민감하고, 영상을 분석하기 위한 복잡한 연 산을 수행할 수 있는 고성능의 연산 시스템이 필요 하며, 장애물에 가려 보이지 않는 물체는 인식할 수 없는 문제가 있다. 비콘으로부터 전달된 RF 신호 크기를 이용하여 거리를 측정, 삼각 측량을 하는 접
근 방식[5,6]은 공간 내의 절대 좌표에서의 위치를 알
려주는 장점이 있지만 전파 전달에 있어 금속 등 주변 물체의 영향을 쉽게 받기 때문에 위치 측정 오차가 수 미터 이상으로 큰 문제가 있다. 음파를 이용하여 전파와 음파의 도달 시간간의 차이를 이 용한 방식[7,8]은 수십 센티미터 정도의 오차로 정확 한 거리 측정이 가능하지만 초음파 센서가 더해져 상대적으로 크기가 크고, 장애물에 의해 음파가 제 대로 전달되지 않는 경우에는 사용할 수 없다. 또한 거리를 이용한 접근 방식은 위치 측정을 위한 기준 스테이션의 설치가 필요하고, 로봇과 대상물의 위치 는 알 수 있지만 방향을 알 수 없기 때문에 대상물 로 이동하기 위해서는 방향을 찾아야 하는 문제가 있다.
이러한 문제를 해결하기 위해 RFID를 이용한 목 표물 인식 및 방향을 이용한 로봇 이동 시스템을 개발하였다. 개발한 시스템은 지향성 안테나를 이용 한 것으로 안테나의 방향에 따라 수신된 전파의 세 기가 변화하는 것을 이용하여 RFID 태그로부터의
전파의 도래 방향을 측정, 지도나 기준 스테이션 없 이 목표물에 도달하는 것이 가능하다[9]. 하지만 방 향을 측정하기 위해서는 안테나 방향에 따른 수신 전파 세기 변화 패턴이 필요하기 때문에 이동간 멈 춰 고정된 위치에서 방향 측정을 해야 하고, 대상물 도 고정된 물체로 국한되는 문제가 있다.
두 축 안테나 시스템은 직각으로 배치된 두 개의 지향성 안테나에서 수신된 전파 세기의 차이를 통 해 방향을 측정하는 것으로 로봇이 멈추지 않고 이 동 간에서도 연속적으로 방향 변화를 인식하여 이 동하는 것을 가능하게 하였다[10]. 또한 태그가 움직 이는 경우에도 수신된 전파의 세기 차이의 변화를 통해 방향 변화를 알 수 있어 이동 물체의 추적이 가능하다[1]. 하지만 전파 전달에 영향을 주는 주변 장애물들이 혼재된 복잡한 환경에서는 측정 방향의 오차가 커지기 때문에 목표물로 제대로 이동하지 못하는 문제가 있다.
이러한 문제를 해결하기 위해 본 논문에서는 g-filter를 기반으로 한 오차 보정 알고리즘을 제안 한다. g-filter는 현재의 측정값과 이전의 추정값의 분산값의 차이를 이용하여 현재의 측정값이 반영되 는 정도를 조절하는 것으로 오차를 보정한다. 방향 을 정확하게 추정할 수는 없지만 최소한 로봇이 물 체로 접근 가능한 범위까지는 오차를 줄이는 것이 가능하여 방향을 잃지 않고 목표물로 접근하는 것 이 가능하다. 제안한 알고리즘을 적용한 시뮬레이션 및 파이오니아 3DX 로봇 플랫폼을 활용한 실험 결 과는 로봇이 복잡한 환경에서도 목표물에 도달하는 비율이 높아지는 것을 보여준다.
본 논문은 다음과 같이 구성되어 있다. 2장에서 는 두 축 안테나를 이용한 방향 탐지에 대해, 그리 고 3장에서는 상용 이동 로봇에 개발한 방향 탐지 리더를 더해 개발한 로봇 이동 시스템에 대해 소개 한다. 4장에서는 제안한 오차 보정 알고리즘에 대해 설명하고, 5 장에서는 시뮬레이션과 로봇 이동 시스 템을 이용한 실험 결과를 보여 준다. 마지막으로 6 장에서 결론을 맺는다.
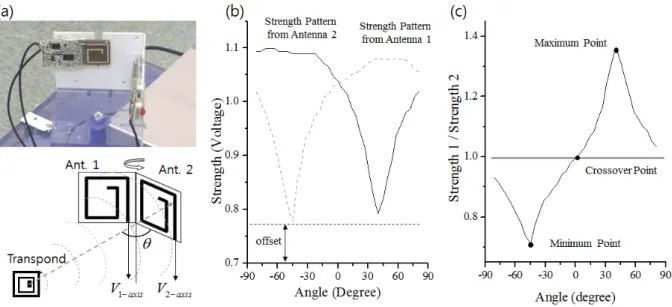
Ⅱ. 방향 측정이 가능한 두축 안테나 본 논문에서는 두 축 안테나를 이용하여 목표물 에 부착된 RFID 태그로부터의 전파 도래 방향을 측정한다. 두 축 안테나는 그림 1-(a)과 같이 두 개 의 지향성 안테나를 직각으로 배치한 것으로 각각 의 안테나로부터 수신된 RF 신호의 크기의 비율로
그림 1. 두 축 안테나 및 RF 신호 수신 세기 측정 결과, (a) 두 축 안테나(상) / 태그로부터 안테나에 전파가 도래하는 경우(하), (b) 각각의 안테나에서 측정한 수신 신호 세기, (c) 측정 신호 세기비
Fig. 1. Dual-directional antenna and its received RF signal strength pattern, (a) Snapshot of the dual-directional antenna(upper) / Azimuth angle of the direction of arrival of a signal, (b) Received signal strength(RSS) pattern of each antenna, (c) Ratio of the RSS
부터 방향을 측정한다. 그림 1-(a) 의 아래와 같이 태그로부터의 크기 의 전파가 면적 를 가지는 지향성 안테나를 통과할 때 각 안테나에서 수신된 신호 세기 는 다음과 같다.
∝ sin
∝ sin
(1)
여기서 는 안테나 방향과 전파의 도래 방향간 의 사이각이고, 은 전파의 이동 거리이다. 는 상 수로서 실제 환경에서의 다양한 주변 환경, 매질 등 에 의한 전파 크기 변화를 반영한다. 두 전파 세기 비 는
tan (2) 가 되어 세기비로부터 각도를 계산하는 것이 가능 하다. 그림 1-(b) 는 3미터 거리에서 측정한 안테나 베이스 회전시 각 안테나에서의 신호 세기 변화 패 턴이고, 그림 1-(c)는 세기의 비이다. 그림 1-(b)에 나타난 것과 같이 실제 측정한 전파 세기에는 수신 기 회로와 화이트 노이즈에 의한 오프셋 전압이 포 함되어 있다. 전파 수신 패턴으로부터 오프셋값을 측정, 제외하는 것이 가능하지만 항상 일정하지는 않고, 환경 조건 및 시스템 상태에 따라 조금씩 변 화하는 경향이 있어 신호 세기의 비율로부터 계산 한 각도의 정확성은 높지 않다. 하지만 그림 1-(c)
의 검은 점으로 표시된 점 중 교차점(crossover point)은 최대값이나 최소값과는 달리 오프셋 값의 변화에도 변동되지 않는 값으로 두 개의 안테나의 중간, 즉 45도 각도로 통과할 때의 세기비로서 어 떠한 경우에도 교차점의 값은 변화하지 않는다. 그 리고 90도 범위 내에서 교차점을 중심으로 세기의 비율은 좌우에서 증감을 하기 때문에 계산한 각도 는 부정확하더라도 최소한 어느 방향에서 전파가 전달되는지 추정하는 것이 가능하여 추정한 방향으 로 안테나를 돌려 교차점인 크기비가 1.0인 값을 찾는 것을 통해 정확한 전파 도래 방향을 알 수 있 다.
Ⅲ. 방향 탐지 이동 로봇 시스템
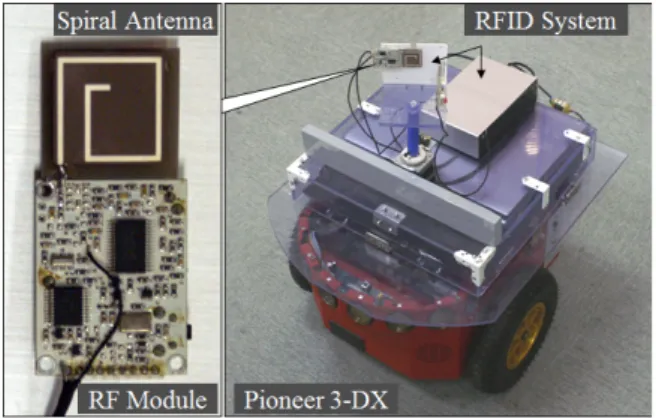
그림 2는 RFID에 사용되는 RF 모듈 및 방향 탐 지 리더를 이용한 이동 로봇 시스템을 보여준다. 시 스템은 1) 방향 탐지가 가능한 Active RFID 및 2) 리더에서 측정한 방향에 연동하여 이동하는 이동 로봇 Pioneer 3DX의 두 개의 파트로 구성되어 있 다. 그림2의 좌측은 RFID 시스템에 사용되는 Ymatics사에서 개발한 303.2 Mhz 대역의 RF 모듈 로 내장 펌웨어의 종류에 따라 태그와 데이터 수집 모듈의 두 가지로 작동한다. 모듈 상부에 부착된 것 은 세라믹 유전체를 이용한 지향성 소형 Spiral 안
그림 2. 지향성 Spiral 안테나가 부착된 RF 모듈과 방향 탐 지 RFID 리더가 적용된 이동 로봇
Fig. 2. RF Module with directional sprial antenna and Mobile robot equipped with DOA sensing RFID reader 테나로 방향 측정이 가능하다.
리더는 두 개의 RF 모듈과 모듈 제어를 위한 Atmega2560 마이크로프로세서로 구성되어 있다. 두 개의 모듈을 직각으로 배치된 안테나 베이스에 부 착, 두 축 안테나를 구성한다. 리더는 태그의 ID를 인식함과 동시에 수신된 신호 세기를 측정하여 RS232 인터페이스를 통해 마이크로프로세서로 전달 하고, 마이크로프로세서는 신호 크기의 비율에 따라 안테나를 회전하여 전파의 도래 방향을 측정한다.
이동 로봇 플랫폼으로는 Adept Technology사의 Pioneer 3DX를 이용하였고, 상부에 개발한 리더 및 두 축 안테나 베이스를 부착하여 로봇 이동간 방향 변화를 측정하는 것이 가능하게 하였다. 안테나 베 이스는 스텝모터로 제작한 회전 베이스에 부착하여 필요시 로봇의 회전 없이도 독립적으로 안테나 방 향을 조절할 수 있게 하였다. 또한 회전 베이스는 로봇의 두 바퀴의 중앙에 위치하여 로봇의 회전하 는 경우에도 항상 로봇 중앙에 위치할 수 있게 하 였다.
로봇은 다음과 같은 방식으로 목표 태그로 이동 한다. 먼저 안테나를 –90 도에서 90 도까지 회전 하면서 수신 신호 세기 및 두 안테나에서의 비율 변화에 대해 측정한다. 측정한 결과에서 신호에 포 함된 Offset을 구해 제외하고, 나머지 비율로부터 교차점을 이용, 초기 방향을 잡는다. 로봇은 찾은 방향으로 회전 후 이동하면서 일정한 거리 간격으 로 수신 신호 세기 비의 변화에 따라 좌우 바퀴의 속도를 전환한다. 최종 위치는 신호 크기에 의해 측 정하여 50 cm 이내의 범위에 들어갔을 때 도착한 것으로 간주한다. 사용하는 RF 모듈은 303.2 MHz 의 전파를 사용하기 때문에 파장은 약 1 미터로, 50 cm 이내에서는 근거리장으로 접근시 거리의 3승에 반비례하여 급격히 증가하기 때문에 수신 신호 세 기로부터 측정한 거리는 비교적 정확하다[9].
로봇 이동간의 로봇 자체에 의한 오차는 고려하 지 않았다. 먼저 선행 연구 결과 정확하게 전파가 도달하는 경우에도 각도 오차는 ± 4 도 정도로 이 동 로봇의 회전 및 이동시 각도 및 거리 오차보다 크기 때문에 이동 오차는 무시할 수 있다[9]. 또한 실제 로봇 이동시에는 연속적으로 측정한 각도에 따라 방향을 변화하면서 이동하는 것으로 로봇 이 동시의 위치 및 방향 데이터를 사용하지 않기 때문 에 이동간의 오차가 발생해도 누군가 로봇을 들어 서 방향을 반대로 바꾸는 등의 변화가 아니라면 실 제 로봇 이동에는 영향을 미치지 않는다.
Ⅳ. 오차 보정 알고리즘
개발한 RFID 시스템을 이용하여 신호 세기로부 터 전파의 도래 방향을 측정하는 것이 가능하다. 하 지만 측정한 방향과 실제 방향 간에는 오차가 발생 할 수 있다. RF 신호는 금속면이나 액체 등 주변 물체의 영향을 쉽게 받는다. 그림 3은 복도와 같은 일반적인 환경에서의 RF 신호의 전파를 단순화하여 보여준다. 안테나에서 수신된 전파의 Magnetic Flux 는 간략하게
sin 로 표시 할 수 있다. 이 때 은 수신 전파 세기에 관계된 상수로 장애물에 의해 산란되거나 반사된 전파의 크기 변화를 반영한다. 본 논문에서는 Direct Wave 와 같이 반사 및 굴절 없이 전달된 전파의 경우에 는 1을, 그 외에는 0.5로 간략화하였다. 는 수신 전파 방향을 반영한다. 이 때 수신된 전파 는 가장 가까운 경로로 전파되는 와 주변 장애물로부 터 반사되어 오는 개의
가 합쳐진
(3)
이 된다[12,13]. 바로 전달되는 전파에 대해 반사되거 나 굴절되어 오는 전파는 크기 및 방향이 다르기 때문에 의 크기 및 방향은 바로 전달되는 전 파와 차이가 생겨 장애물이 있는 환경에서 측정한 전파 세기 및 각도 오차가 발생하는 원인이 된다.
만약 주변 환경의 모든 정보를 알 수 있다면 이론 적으로는 오차를 계산하는 것이 가능하다. 하지만 실제 환경에서 RF 신호 전파에 영향을 주는 요인은
그림 4. 태그의 위치 변화에 따른 수신 세기 변화 (2회 측정) (a) 태그가 수평 방향으로 이동하는 경우 (b) 수직 방향으로 이동하는 경우.
Fig. 4. RSS ratio changes according to the change of the tag’s positions (2 trials) (a) horizontally, (b) vertically.
무수히 많고, 주변 장애물의 특성 및 위치의 작은 변화로도 크게 달라지기 때문에 환경 정보로부터 오차를 계산하는 것은 불가능하다.
그림 4는 건물 내 복도 환경에서 로봇의 이동에 따른 로봇과 태그의 위치 변화에 따른 수신 세기 비의 변화를 보여준다. 앞에 장애물이 있는 경우와 없는 경우의 두 가지 경우에 대해 테스트를 진행하 였고, 장애물로는 철제 의자를 사용하였다. 먼저 태 그 위치가 수평으로 변화하는 경우 안테나로부터 태그 방향의 각도 변화가 생겨 수신 세기의 비는 커지거나 작아지게 된다. 반대로 수직 방향으로 변 화하는 경우에는 각도 자체의 변화는 없기 때문에 일정하게 유지된다. 사선 방향의 움직임에 대해서는 각도 변화로 수평 방향의 움직임과 본질적으로 같 고, 실제 로봇이 목표물로 향해 움직이는 경우에는 수직 방향의 움직임이기 때문에 본 논문에서는 대 표적인 두 가지 경우에 대해서만 다뤘다.
그림은 수신 세기 비는 수신 안테나에 대해 태그 의 방향의 변화에 따라 깨끗한 패턴이 아닌 진동하 는 형태로 변화하는 것을 보여준다. 또한 장애물이 있을 때 변화의 폭이 커지는 것을 보여준다. 패턴의 진동은 로봇으로부터 태그로의 방향 측정에 오차로 로봇이 제대로 방향을 찾지 못하는 원인이 된다. 특 히 태그의 위치가 우측으로 이동하는 경우의 그래 프에서 태그는 좌측에 있지만 오차에 의해 수신 신 호 세기의 비가 1보다 작게 나오는 경우, 태그가 우측에 있는 것으로 여겨지기 때문에 반대 방향으 로 회전하게 되어 오히려 태그로부터 멀어지게 된 다.
이러한 문제를 해결하기 위해 본 논문에서는 g-filter를 기반으로 오차 보정을 하였다. g-filter는 연속적으로 변하는 값에서 포함된 오차를 추정, 비 교적 정확한 값을 도출하기 위한 것으로 추정값과 측정값의 신뢰도 차이에 따라 반영값을 변경하여 오차를 보정한다. 신뢰도는 측정값의 급격한 변화시 분산값이 커지는 것을 이용하여 추정한다[14]. 오차 보정은 다음과 같은 순서로 이루어진다. 만약 현재 의 세기 비가 이라 하면 은 이전값과 현재값 으로의 변화율로 표시할 수 있다.
(4) 실제 측정값에는 에러를 포함하기 때문에 변화율
에 신뢰도를 반영하는 가중치(gain) 를 넣어 보정값 를 구할 수 있다.
(5) 만약 현재의 값의 신뢰도가 높다면 현재의 측정 값과 이전 추정값의 차이인 가 크게 반영되고, 낮다면 작게 반영되어 오차가 보정된다. 가중치 는 분산값을 이용하여
∼
∼
(6)
으로 구할 수 있다. 추정값의 초기값은 처음 측 정한 Ratio 에 초기값인 를 곱한 값을 사용한 다. 그림 5는 초기값에 따른 필터링되는 정도 변화 를 보여준다. 초기값이 커질수록 원데이타에 가깝고, 작을수록 실제 변화가 반영되지 않는다. 실내에서 목표물까지 이동하는 본 연구의 로봇 이동에서 이 동간 측정 데이터 수가 수십개이기 때문에 초기치 에 민감하게 반응하는 경향이 있다.
실험 결과 본 연구의 로봇 이동 조건 하에서는 0.7 ~ 0.9 사이에서 값의 변화를 반영하면서 필터링 이 되는 것을 알 수 있다. 본 필터링 알고리즘으로 완벽하게 오차를 제거하지는 못하지는 로봇이 측정 방향으로 이동시 오차가 존재하더라도 태그까지의 거리가 멀어지지 않는 정도로 줄일 수 있다면 도달 하는 것이 가능하다. 또한 실제 큰 오차가 존재하는 경우에도 약간의 위치 변화로도 오차가 줄어들기 때문에 급격한 변화에 대응하는 것으로 충분하다.
실제 실내에서 목표물까지 이동하는 본 논문의 상 황에서는 로봇 이동간 수신 신호 세기 비의 변화에
그림 5. 초기 g0값의 차이에 따른 필터 적용에 따른 추정값 변화 (a) 태그가 수평 방향으로 이동하는 경우 (b) 수직 방향 으로 이동하는 경우
Fig. 5. Shape of the filtered ratio according to the initial gain g0, (a) tag moves horizontally, (b) vertically.
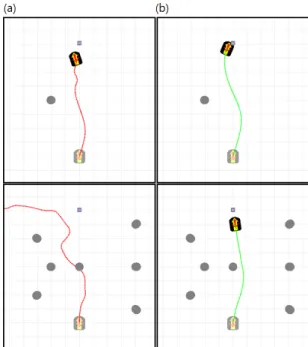
그림 6. 로봇 이동 시뮬레이션 결과 (a) 측정 방향, (b) 오차 보정 알고리즘 이용
Fig. 6. Simulation results of robot docking (a) without, (b) with algorithm
대해 칼만 필터를 사용하는 것도 가능하지만 본 논 문에서 대상으로 하는 시스템은 실내에서의 5 미터 정도에 있는 목표물로 이동하는 것으로 이동 간 취 득 데이터가 수십 개에 지나지 않고, 시스템 모델이 각도 변화의 1차 행렬 형태로 단순하기 때문에 간 단한 g-filter를 사용하였다.
Ⅴ. 실험 결과
개발한 방향 탐지 RFID를 이용한 로봇 이동 시 스템과 오차 보정 알고리즘을 검증하기 위한 실험 을 진행하였다. 먼저 Visual C를 이용하여 개발한 시뮬레이터를 이용한 실험을 진행하였다. 개발한 시 뮬레이터는 실제 환경에서 그림 3과 수식 (3)에 나 타나는 바와 같이 다중 경로로 전파되는 신호 모델 을 다음과 같은 조건으로 단순화한 것이다.
장애물의 반사 위치는 장애물의 중앙으로 하고, 반사되는 신호 크기는 반으로 줄어든다.
측정된 방향에는 ±4 도 이내의 오차가 포함된 다. (오차 범위 내에서 랜덤으로 오차를 더해 준다)
반사되어 오는 전파의 경로는 태그로부터 장애 물까지, 장애물로부터 로봇위치까지의 직선으 로 이루어진다.
목표 태그는 고정되어 있다.
로봇 이동시의 오차는 고려하지 않는다.
위의 가정은 단순화하였기 때문에 실제 환경과는 동일하지는 않지만 다중 경로에 의한 오차는 충실 히 반영하여 위치에 따른 값의 변화를 볼 수 있다.
전방 5 미터 거리에 있는 태그에 대해 방향을 추정 후 이동시 수신 세기비가 변화하는 것에 따라 두 바퀴의 속도를 조정하면서 이동하는 것을 OpenGL 를 이용하여 표시할 수 있도록 하였다.
로봇의 방향은 다음의 식에 의해 변환한다. 교차 점의 값 1.0을 중심으로 태그로의 방향은 좌우로 나뉘고, 크기 차이가 각도 차이를 반영하기 때문에 바퀴 속도비에 따른 회전 각도 는 다음과 같이 계산하였다.
(7) 여기서 는 수신 신호 세기비와 각도의 비율을 반영한 비례상수로 최초 –90 도에서 90 도까지 패 턴 측정시 패턴으로부터 계산한다.
그림 6은 시물레이션 결과이다. 그림 5-(a)는 안 테나 수신비에 의한 측정 방향에 따라 움직였을 때 이고, 5-(b)는 측정 방향에 오차 보정 알고리즘을 적용한 경우이다. 로봇의 이동간 데이터 취득은 그 림 5의 실험에서의 같은 간격으로 하였다. 회색 원 은 장애물의 위치로 장애물이 증가할 경우 방향을 잃고 로봇은 다른 곳으로 가는 것을 알 수 있다.
하지만 오차 보정 알고리즘을 사용하는 경우 로봇 은 성공적으로 목표물에 도달할 수 있다.
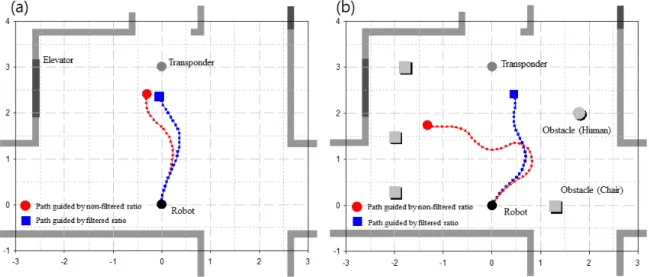
그림 7은 실제 로봇을 가지고 진행한 실험 결과 를 보여준다. 로봇 제어는 시뮬레이션과 동일하다.
(a) (b)
그림 7. 실환경 실험 결과 (a) 가까운 장애물이 없는 경우 (b) 많은 장애물이 가까이 있을 때
Fig. 7. Experiment results in real environment, (a) No neighboring obstacle is positioned, (b) Many obstacles positioned in the environment
No. of Obstacles
Without
Algorithm With Algorithm
S F % S F %
Simulation 0 1 7
50 49 39
0 1 11
100 98 78
50 50 44
0 0 6
100 100 88 Real
Environment No Exist
10 3
0 7
100 30
10 8
0 2
100 80 표 1. 알고리즘을 적용하는 경우의 로봇 이동 성공률 의 변화
Table 1. Changes of docking success rate when filtering algorithm is used.
건물 엘리베이터 앞의 공간에서 실험한 것으로 각 각 주변 장애물이 없을 때와 가까이에 있는 경우로 나누어서 실험을 진행하였다. 장애물이 적을 경우에 는 오차 보정 알고리즘 없이도 목표물로 이동하는 것을 알 수 있다. 가까운 주변 장애물이 없는 환경 에서도 그림 7-(a)와 같이 경로가 휘어진 것은 벽, 엘리베이터, 소화기, 철제문 등의 영향 때문이다. 그 림 7-(b)는 가까운 장애물로 철제 의자와 사람이 있 는 경우이다. 가까운 장애물에 의한 영향으로 로봇 은 방향을 잃고 목표물에 도달하지 못하지만 오차 보정 알고리즘을 적용한 경우 방향을 잃지 않고 목 표물에 도달하는 것을 볼 수 있다.
표 1은 반복 실험 결과를 나타낸다. 시뮬레이션 의 경우 장애물의 위치를 변화하면서 50 번 반복 테스트를 진행하였고, 실환경 실험에서는 그림 7과 같이 장애물을 배치한 후 10 번의 반복 실험을 진
행하였다. 표에서 S, F는 각각 성공율과 실패율을 나타낸다. 실제 환경에서 반복 실험의 경우 동일한 조건에서 실험을 반복하지만 결과가 달라지는 것은 장애물의 위치 변화는 없지만 로봇 이동 후 초기 위치로 이동시 위치 및 방향이 조금씩 달라지기 때 문이다. 실험 결과는 어떠한 경우에도 제안한 알고 리즘을 사용하는 경우 성공률이 좋아지는 것을 확 인할 수 있다.
Ⅵ. 결 론
RFID를 이용한 목표물 인식 및 이동 시스템을 개발하였다. 개발한 시스템은 전파의 도래 방향을 이용한 것으로 두축 안테나에서의 신호 크기비를 이용하여 방향을 측정, 그 방향으로 이동하는 것으 로 로봇은 목표물에 접근하는 것이 가능하다. 복잡 한 환경에서 주변 물체의 영향으로 측정 방향의 오 차가 증가하여 로봇이 목표물에 도달하지 못하는 문제를 해결하기 위해 g-filter 기반의 오차 보정 알 고리즘을 개발하였다. 분산값의 변화를 이용하여 큰 오차를 줄임으로써 로봇은 방향을 잃지 않고 목표 태그로 접근하는 것이 가능하다. 본 논문을 통해 로 봇 이동을 위한 지향성 안테나를 이용한 방향 측정 이 가능한 RFID 시스템 및 오차 보정을 위한 g-filte를 개발하였다. 개발한 방향 측정 RFID 시스 템은 로봇 이동만이 아닌 다양한 측위 및 이동 시 스템에 적용 가능하다. 이후의 연구는 먼저 g-filter 의 gain 값을 조건 변화에 따라 능동적으로 변화할
수 있게 알고리즘을 개선하고 로봇 이동 경로 및 수신 세기 변화 데이터를 이용, 성공률을 보다 높이 는 것과 함께 거리 센서 융합을 통해 충돌 없는 안 전한 이동 로봇 시스템의 개발 및 현재 단수의 태 그가 아닌 이동하는 복수의 태그의 위치를 추적하 는 위치 인식 시스템을 개발하는 것이다.
References
[1] N. Y. Chong, H. Hongu, K. Ohba, S. Hirai, and K. Tanie, “A distributed knowledge network for real world robot applications,” in Proc.
IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 187-192, 2004
[2] L. E. Holmquist, H. W. Gellersen, G. Kortuem, S. Antifakos, F. Michahelles,. B. Schiele, M.
Beigl, and R. Maze,“ Building intelligent environments with Smart-Its,” IEEE Computer Graphics and Applications, vol. 24, issue. 2, pp.
56-64, Jan.-Feb. 2004.
[3] D. C. K. Yuen and B. A. Macdonald, “Vision–
based localization algorithm based on landmark machining, triangulation, reconstruction, and comparison,” IEEE Transaction on Robotics, vol. 21, issue 2, pp 217-226, April 2005.
[4] S. Se, D. G. Lowe, and J. J. Little, “Vision based global localization and mapping for mobile robots,” IEEE Transaction on Robotics, vol. 21, Issue 3, pp 364-375, June 2005.
[5] J. Hightower, G. Borriello, and R. Want,
“SpotON : An indoor 3D location sensing technology based on RF signal strength,” UW CSE Technical Report, 2001.
[6] P. Bahl and V. N. Padmanabhan, “RADAR: An in-building RF-based user location and tracking system,” in Proc. IEEE INFOCOM, pp.
775-784, 2000.
[7] A. Smith, H. Balakrishnan, M. Goraczko, and N. Priyantha, “Tracking moving devices with the cricket location system,” in Proc. 2nd Int’l Conf. on Mobile Systems, Applications, and Services, pp. 190-202, 2004
[8] L. M. Ni, Y. Liu, Y. C. Lau, and A. P. Patil,
“LANDMARC : Indoor location sensing using active RFID,” ACM Wireless Networks, vol. 10,
no. 6, pp. 701-710, 2004.
[9] M. Kim and N. Y. Chong, “RFID-based mobile robot guidance to a stationary target,”
Mechatronics, vol. 17, issue 4-5, pp. 217-229, May-June 2007.
[10] M. Kim, H. W. Kim, and N. Y. Chong,
“Automated robot docking using direction sensing RFID,” IEEE Int’l Conf. on Robotics and Automation, pp. 4588-4593, 2007.
[11] M. Kim, and N. Y. Chong, H. S. Ahn, and W.
Yu, “RFID-enabled target tracking and following with a mobile robot using direction finding antennas,” in Proc. IEEE Conf. on Automation Science and Engineering, pp.
1014-1019, 2007
[12] L. Tsang, and J. A. Kong, Scattering of Electromagnetic Waves : Advanced Topics, John Wiley & Sons Ltd., 2001.
[13] F. A. Alves, M. R. L. Albuquerque, S. G. Silva, and A. G. d'Assuncao, “Efficient ray-tracing method for indoor propagation prediction,” in Proc. SBMO/IEEE MTT-S Int’l Conf. on Microwave and Optoelectronics, pp. 435-438, 2005.
[14] E. Brookner, Tracking and Kalman Filtering Made Easy, John and Willey & Sons, Inc., 1998.
김 명 식 (Myungsik Kim)
2001년 2월 서강대학교 물리 학과 졸업
2003년 2월 서강대학교 물리 학과 석사
2007년 6월 JAIST 정보과학과 정보시스템학 박사
2008년~2009년 UGII 선임연 구원
2010년~현재 서강대학교 미래기술연구원 연구교수
<관심분야> RFID/USN, 이동 로봇 제어
김 광 수 (Kwangsoo Kim)
1981년 2월 서강대학교 전자 공학과 졸업
1983년 2월 서강대학교 전자 공학과 석사
1992년 2월 서강대학교 전자 공학과 박사
1993년~1997년 한국전자통신 연구원 챙임연구원
1998년~2005년 정보통신연구진흥원 책임연구원 2005년~2008년 대구경북과학기술원 책임연구원 2008년~현재 서강대학교 전자공학과 부교수
<관심분야> 지능형 센서 및 센서 네트워크