構 造 工 學
大 韓 土 木 學 會 論 文 集第32卷 第1A 號·2012年 1月 pp. 19 ~ 30
다중 표적을 이용한 부유식 구조물의 영상 기반 동적 응답 계측
Vision-Based Dynamic Motion Measurement of a Floating Structure Using Multiple Targets under Wave Loadings
이진학*·김진하**·정원무***·채장원****
Yi, Jin-Hak
·
Kim, Jin-Ha·
Jeong, Weon-Mu·
Chae, Jang-Won···
Abstract
Recently, vision-based dynamic deflection measurement techniques have significant interests and are getting more popular owing to development of the high-quality and low-price camcorder and also image processing algorithm. However, there are still several research issues to be improved including the self-vibration of vision device, i.e. camcorder, and the image pro- cessing algorithm in device aspect, and also the application area should be extended to measure three dimensional movement of floating structures in application aspect. In this study, vision-based dynamic motion measurement technique using multiple tar- gets is proposed to measure three dimensional dynamic motion of floating structures. And also a new scheme to select thresh- old value to discriminate the background from the raw image containing targets. The proposed method is applied to measure the dynamic motion of large concrete floating quay in open sea area under several wave conditions, and the results are com- pared with the measurement results from conventional RTK-GPS(Real Time Kinematics-Global Positioning System) and MRU(Motion Reference Unit).
Keywords :
vision-based dynamic motion measurement, selection of threshold value, global positioning system, motion refer- ence unit, floating structures···
요 지
최근 캠코더와 같은 영상 장비의 고성능화 및 대중화
,그리고 화상 처리
(image procession)기술의 발달 등으로 인하여
영상 기반의 구조물 동적변위 계측에 관한 연구가 활발하며
,이러한 연구개발의 결과로 관련 시스템의 사용성 및 정확도가
많이 개선되고 있다
.그러나 이러한 영상 기반 시스템의 경우 장비 측면에서 볼 때 영상 장비 자체의 진동에 의한 오차
,화상 처리 과정에서의 오차 등을 개선할 필요가 있으며
,또한 적용 측면에서 볼 때 교량의 수직 처짐이나 건축구조물의 수 평변위 계측에 제한되어 있어 부유체의 파랑응답과 같은
3차원 운동을 하는 구조물에 대한 확장이 필요한 시점이다
.이 연 구에서는 이러한 영상 기반 동적변위 계측방법을
3차원 문제에 적용하기 위하여 다중 표적
(multiple target)을 사용한 방법
을 제시하고
,또한 화상 처리 과정에서의 정량적 판단 기준을 제시함으로써 간접적으로 영상 기반 시스템의 계측 정확도를 평가하여
,영상 기반 방법에 의하여 계측된 동적변위 계측결과의 유효성을 판단할 수 있도록 하였다
.제안된 방법을
50 m×
30 m×
5 m규모의 대형 부유체에 대한 실해역 파랑 응답 실험에 적용하여
,부유체의 동적변위를 계측하였으며
,그 결과를 기존의
RTK-GPS(Real Time Kinematics-Global Positioning System), MRU(Motion Reference Unit)등의 장비를 이용
한 계측결과와 비교함으로써 그 성능을 검증하였다
.핵심용어 : 영상 기반 동적변위 계측
,임계값 결정
, RTK-GPS, MRU,부유체
···
1. 서 론
교량이나 건축 구조물과 같은 사회기반시설물의 유지관리 를 위하여 , 구조물의 고유주파수와 모드형상 , 모드감쇠비 등 과 같은 구조물의 동특성을 지속적으로 모니터링 하는 것이
중요하며 ( 김정태 등 , 2008), 또한 구조물의 사용성 평가 또
는 직관적 안전성 평가를 위해서는 구조물의 변위를 모니터
링 하는 것이 매우 중요하다고 할 수 있다 ( 박종웅 등 ,
2009). 현재 구조물의 변위계측을 위해서는 LVDT(Linear
Variable Differential Transformer) 또는 링 게이지 (Ring
Gauge) 등과 같은 접촉식 센서를 사용하거나 , LDV(Laser
Doppler Vibrometer) 과 같은 고가의 레이저 장비 ( 이창복 등 , 2004; Nassif 등 , 2005), 혹은 GPS(Global Positioning System)
와 같은 GPS 위성을 이용한 장비를 이용하여 측정할 수
*정회원·교신저자·한국해양연구원연안개발·에너지연구부책임연구원
(Email : [email protected])
**한국해양연구원해양구조물·플랜트연구부책임연구원
(E-mail : [email protected])
***정회원·한국해양연구원연안개발·에너지연구부책임연구원
(Email : [email protected])
****정회원·한국해양연구원연안개발·에너지연구부책임연구원
(Email : [email protected])
있다 ( 이호철 등 , 2001; Celibi, 2000). 그러나 접촉식 센서의 경우 센서 설치를 위한 고정된 기준점을 확보하기 어려운 고교각 교량이나 , 강이나 바다를 건너는 해상 교량에 대해서
는 적용이 어려우며 , LDV 의 경우 뛰어난 성능에도 불구하
고 , 상대적으로 매우 고가의 정밀한 장비로 일반 현장에서의
적용이 어려운 상황이다 . 한편 RTK-GPS 의 경우 건축구조물
의 정 , 동적 횡방향 변위 , 교량의 연중 처짐 변화 등을 모 니터링하기 위하여 많은 연구가 수행되고 있으나 , 수직 처짐 에 대한 계측 정밀도가 낮아 교량과 같이 수직 처짐이 중요 한 경우에는 다른 방법을 병행해야 하는 어려움이 있다 . 이
와 같이 기존 접촉식 센서 또는 레이저 , GPS 기반의 동적
변위 계측의 단점을 극복하기 위하여 , 최근 화상 처리를 이 용한 영상 기반 동적변위 계측에 관한 관심이 매우 높다 .
영상 기반의 동적변위 계측은 주로 캠코더 또는 웹캠과 같은 영상 장비를 기본으로 하며 , 영상 자료에 대한 화상 처리로부터 구조물의 동적변위를 구하게 된다 . 이러한 과정 은 기본적으로 레이저 장비나 GPS 에 비하여 매우 직관적이 며 , 최근 경제적이고 성능이 매우 우수한 영장 장비의 보급 으로 더욱 쉽게 접근할 수 있는 방법이 되고 있다 . 영상 기
반의 동적변위 계측과 관련하여 국내외에서 많은 연구가 이 루어지고 있으며 , 많은 결과가 발표되고 있다 . 권순덕 등
(2002) 은 영상 기반 변위계측과 관련하여 캠코더와 IEEE1394
통신을 이용한 영상 기반 교량 동적변위 계측에 관한 연구
를 수행한 바 있고 , 김기영 등 (2005) 은 구조물의 저주파 진
동을 계측하기 위하여 삼각형 표적을 이용한 영상 기반 방 법을 제안한 바 있는데 , 이들은 삼각형의 세 꼭짓점을 탐색 하여 변위를 계측함으로써 그 이전의 모서리 검출 (Edge
detection) 을 이용한 방법에 비하여 속도를 개선할 수 있었다 .
한편 , Lee 등 (2006a, 2006b) 은 ROI(Region of Interest)
개념을 도입하여 화상처리 영역을 최소화하고 , 또한 표적과 배경 사이를 구분하기 위하여 흑백영상의 밝기 정보에 대한
통계치를 이용하여 임계값 (threshold) 을 결정할 수 있도록 하
였으며 , 이로부터 교량의 변위를 실시간으로 계측하기 위한 시스템을 제안한 바 있다 . 또한 이들은 제안 기법을 교량 내하력 평가에 적용하여 , 실제 교량에 대한 내하력 평가 시
접촉식 센서보다 영상 기반 센서가 레이저 장비와 더 일치 하는 결과를 얻을 수 있음을 현장실험을 통하여 검증한 바 있다 (Lee 등 , 2007). 한편 김성완 등 (2009) 은 영상 내 표적 의 상관관계를 이용하여 영상의 이동을 추적하고 , 구조물의 변위를 계측하는 방법을 제시하였으며 , 이 방법을 외팔보의 동적변위 계측 및 진동대 위에 설치된 2 층 철골 구조물 내 의 여러 지점에서 동적변위 계측에 적용한 바 있다 ( 김성완
등 , 2010). 한편 보다 최근에 Park 등 (2010) 은 분절화 기법
(partitioning approach) 을 이용하여 고층 건축구조물의 변위
를 정확하게 계측할 수 있는 방법을 제안한 바 있고 , Choi
등 (2011) 은 동영상 화소분할방법을 적용하여 구조물의 동적
변위를 더욱 정밀하게 계측할 수 있는 방법을 제안한 바 있
다 . 한편 Ji 등 (2008) 은 표적을 사용하지 않고 구조물의 동
적변위를 계측할 수 있는 방법을 제안하였으나 , 이 방법은 상대적으로 형상이 단순하여 모서리 검출이 용이하고 , 또한 변위가 상대적으로 큰 케이블의 변위를 계측하는 방법으로 제안되어 적용이 제한적이라 할 수 있다 .
이와 같이 최근 영상 기반의 동적 변위 계측을 위한 많은 연구가 수행되고 있으나 , 이들의 연구는 주로 교량의 수직 처짐이나 또는 건물의 수평변위를 계측하기 위한 연구에 집 중되어 있으며 , 구조물의 3 차원 운동을 계측하는 연구는 거 의 진행된 바 없다 . 또한 표적을 이용한 동적 변위 계측의 경우 표적과 배경을 구분하여 표적의 이동을 추적하여야 하
는데 , 이를 위하여 김기영 등 (2005) 은 직접 구분할 수 있는
임계값을 지정하여 주었으며 , Otsu(1974), Lee 등 (2006a,
2006b; 2007) 은 영상의 밝기 정보를 통계적으로 처리하여
임계값을 결정할 수 있도록 하였다 . 한편 표적과 배경을 구 분하지 않고 , 영상 간의 상관관계를 이용하거나 ( 김성완 등 ,
2009; 2010), 또는 표적의 중심을 구하기 위하여 밝기 정보
를 이용하는 방법 ( 권순덕 등 , 2002) 등도 적용된 바 있다 .
이 연구에서는 표적과 배경을 구분하는 임계값을 객관적으 로 결정할 수 있도록 , 우선 변위 계측시의 정확도에 대한 평가 기준으로 변위오차지수 (DEI, Deflection Error Index)
를 정의하고 , 이러한 DEI 값이 최소화시킬 수 있는 임계값
결정 방법을 제안하였다 . 또한 구조물의 3 차원 운동을 계측할 수 있도록 다수의 표적을 구조물에 설치하여 하나의 캠코더로
2 개 이상의 표적을 동시에 촬영하는 방법을 제안하였다 . 제안 방법을 검증하기 위하여 실해역에서 수행된 부유체 구조물의
파랑 응답 계측 실험에 영상 기반 방법과 MRU(Motion
Reference Unit), RTK-GPS(Real Time Kinematics-Global Positioning System) 등을 적용한 실험을 수행하고 , 영상 기 반 계측결과를 MRU 와 RTK-GPS 장비로부터 구한 동적 변
위 계측결과와 비교하여 , 제안 방법의 정확성 및 사용성을 검증하였다 .
2. 3차원 동적변위 계측 방법
다음 그림 1 에서와 같이 표적 내에서의 좌표 와 캠코더로 촬영한 영상 내의 좌표
<
x
target( y
target>T) ( 〈 x
projy
proj〉
T)
그림 1. 캠코더 영상 촬영 및 표적의 실제 형상 및 영상 내에서의 이미지
사이에는 다음과 같은 선형변환 관계가 있다 .
(1)
여기서 , 는 영상으로 투영된 상태에서의 좌표 ,
즉 픽셀의 위치가 되며 , 따라서
N1×
N2해상도를 갖는 캠 코더를 사용할 경우 , , 의 정수 값을 가진다 . 한편 , 은 표적 내에서의 좌표 로 , 사용자가 실험 대상체의 크기 , 대상체와의 거리 , 동적 변위의 범위 등을 고려하여 설계한 표적 내에서의 실제 좌 표 값이다 .
위 식에서 구해야 하는 미지수는 와
로 총 6 개이며 , 따라서 동일한 표적 내에 존재하는
Np개의 원 중 서로 독립조건을 만족할 수 있는 3 개 원들의 중심 좌표를 이용하여 결정할 수 있다 . 이때 3 개의 원 중심 좌표
를 (
i= 1,2,3) 이라고 하고 , 이 때 각각 원
의 투영된 좌표를 라 하고 이를 위의 식에 대입하면 , 다음 식 (2) 와 같이 6 개의 선형방정식을 구할 수 있고 , 이로부터 구하고자 하는 미지수 와
를 식 (3) 에서와 같이 쉽게 구할 수 있다 . (2)
(3)
이와 같이 3 개의 원 중심 좌표로부터 6 개의 변환계수를 구할 수 있고 , 이 변환계수를 이용하여 다음과 같이 시간
t에서 기록된 영상의 좌표를 이용하여 실제 목표물의 변위를 구할 수 있다 .
(4)
한편 , 영상으로부터 표적 상의 원 또는 임의 형상을 구분 하여야 하는데 , 이를 위하여 서론에서 설명한 바와 같이 특
정 임계값을 적용하여 원하는 영상을 얻을 수 있다 . 이 연 구에서는 표적 상에
Np개 ( ) 의 원을 표시해 두고 , 해당
원의 중심 (centroid) 을 구하는 과정에서 흑백을 구분하여 배
경과 구분하게 된다 . 이러한 임계값을 자동 계산하기 위하여
전체 영상 내에서의 밝기 정보를 이용하여 통계적으로 처리 하여 두 영역 혹은 그 이상의 영역을 구분할 수 있는 값을
구하거나 (Otsu 1979), 혹은 배경과 표적 영상의 밝기에 관
한 통계치를 이용할 수 있다 (Lee 등 , 2006a; 2006b).
이 연구에서는 기존의 화상 자체의 특성을 이용하는 방법 과 달리 , 실제 계측 결과가 얼마나 정확할지를 예측하고 이 에 따른 최적 임계값을 결정하기 위하여 변환행렬을 구하는 데 사용한 3 개의 원 외에 남은 개 원의 계산된 좌
표 값과 실제 좌표 값의 차이를 최소화시킬 수 있는 방법을 제안하였다 . 우선 , 아래와 같은 개의 원에 대하여
i
번째 인식자의 좌표 ( ) 를 변환행렬 (
cij,
di
) 과 영상 내에서의 좌표 ( ) 를 이용하여
구할 수 있다 .
(5)
그리고 이를 실제 중심 좌표와의 차이를 이용하여 다음과 같이 DEI(Deflection Error Index) 를 구할 수 있다 .
(6)
즉 , DEI 값은 영상 기반 변위 계측 시 결과의 평균적인
절대 오차 범위라고 할 수 있다 . 위와 같은 DEI 값을 최소
화시키는 임계값 ( ) 를 다음과 같은 목적함수를 최적화 알
고리즘을 적용하여 쉽게 구할 수 있다
(7)
부유체의 운동에 의하여 표적이 이동한 경우 , 초기 정보와 의 차이로부터 표적의 이동량 , 즉 부유체의 동적변위를 다음 과 같이 구할 수 있다 . 또한 변위를 구하는 과정에서 다음
과 같이
Np개 원의 중심 좌표의 평균으로 X 변위와 Y 변 위를 구함으로써 , 해상도와 정확도를 향상시킬 수 있다 . 편 의를 위하여 아래 그림 및 식에서 화상 처리를 통하여 구한 좌표 값을 의미하는 * 를 생략하였다 .
(8)
위와 같이
Np개의 원 중심 좌표의 초기상태에서부터의 변 화를 구하고 , 최종적으로 표적의 이동 위치는 다음과 같이
N 개 원 중심 좌표 이동 값의 평균을 취하여 구할 수 있다 .
(9)
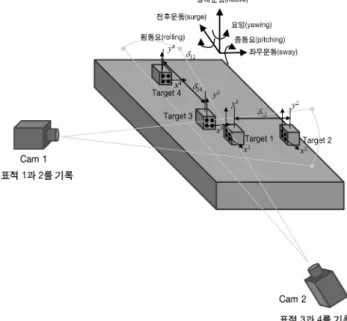
한편 부유체와 같이 3 차원 운동을 하는 구조물의 6 자유도 동적변위 계측을 위해서는 다음 그림 3 과 같이 표적 4 개와 영상 장비인 캠코더 2 대로 구성되는 시스템 구성이 필요하다 .
각 캠코더로 각각 2 개의 표적을 촬영하며 , 이 때
iTarget번 째 표적에서 구한 2 차원 변위를 각각 과 같이 나타낼 경우 , 3 차원변위는 각각 다음과 같이 구할 수 있다 .
x
projy
proj⎩ ⎭
⎨ ⎬
⎧ ⎫ c
11c
12c
21c
22x
targety
target⎩ ⎭
⎨ ⎬
⎧ ⎫ d
1d
2⎩ ⎭ ⎨ ⎬
+
⎧ ⎫
=
x
projy
proj〈 〉
T1
≤ x
proj≤ N
1 1≤ y
proj≤ N
2x
targety
target〈 〉
Tc
ij( i j,
=1 2, ) d
i( i
=1 2, )
x
target i,, y
target i,〈 〉
Tx
ptoj i,, y
proj i,〈 〉
Tc
ij( i j ,
=1 2, )
d
i( i
=1 2, )
x
proj i, =c
11x
target i, +c
12y
target i,+d
1, i
=1 2 3, , y
proj i, =c
21x
target i,+c
22y
target i,+d
2, i
=1 2 3, ,
c
11c
21c
12c
22d
1d
2x
target 1,y
target 1, 1x
target 2,y
target 2, 1x
target 3,y
target 3, 11
–
x
proj 1,y
proj 1,x
proj 2,y
proj 2,x
proj 3,y
proj 3,=
x
target i,t() y
target i,t()
⎩ ⎭
⎨ ⎬
⎧ ⎫ c
11c
12c
21c
221
–
x
proj i,t() d
– 1y
proj i,t() d
– 2⎩ ⎭
⎨ ⎬
⎧ ⎫
=
N
p≥
4N
p–3( )
N
p–3( ) x
t*arget i,t() , y
t*arget i,t()
〈 〉
Tx
proj i,t() , y
proj i,t()
〈 〉
Tx
t*arget i,( ) t y
t*arget i,( ) t
⎩ ⎭
⎪ ⎪
⎨ ⎬
⎪ ⎪
⎧ ⎫
c
11c
12c
21c
221
–
x
proj i,t() d
– 1y
proj i,t() d
– 2⎩ ⎭
⎨ ⎬
⎧ ⎫ ( i
=4, , … N
p)
=
DEI ( ( x
target i,–x
t*arget i,)
2+( y
target i,–y
t*arget i,)
2)
i 4= Np
= ∑
γ
optminDEI γ( ) ((xtarget i,–xt*arget i,( )γ2) y+( target i,–yt*arget i,( )γ2)) i 4=
Np
= ∑
xtarget i,( )tj
∆ =xtarget i,( ) xtj– target i,( )t0
=xtarget i,( ) xtj– target i,(tj 1– )+∆xtarget i,(tj 1– ) ytarget i,( )tj
∆ =ytarget i,( ) ytj– target i,( )t0
=ytarget i,( ) yxtj– target i,(tj 1– )+∆ytarget i,(tj 1– )
x t ( )
j∆
1N
p---
∆ x
target i,( ) t
j, ∆ y t ( )
ji 1= Np
∑
N
---1p∆ y
i( ) t
ji 1= Np
= = ∑
x
itarget, y
itarget( )
그림 2. 표적의 이동 및 이동 시 변위 형상
(10)
여기서 , 는 표적
i와
j사이의 거리이며 , 위와 같이 두 개의
캠코더를 이용하여 구조물의 3 차원 6 자유도를 모두 계측할 수 있게 된다 . 다만 이 경우 캠코더 2 대가 서로 직교하는 것이 가장 좋은 결과를 얻을 수 있으나 , 실제 현장에서 이와 같이 직교하도록 배치하는 것이 어려운 경우가 많을 것으로 판단되 며 , 이와 같은 경우에는 가능한 서로 종속이 되지 않도록 각
도를 90 도에 가깝게 배치할 수 있을 것이다 .
결과적으로 , 캠코더로 표적을 촬영하면서 변위를 실시간으 로 계측하거나 (on-line 방식 ), 혹은 촬영된 영상을 후처리하
여 변위를 계측하는 경우 (off-line 방식 ), 이러한 영상을 화상
처리 (image processing) 하여 구조물의 동적변위를 계측하는
기본적인 단계는 그림 4 와 같다 .
3. 영상 기반 동적변위 계측을 위한 검증 실험
3.1 실험 개요
지난 2008 년 12 월 삼성중공업 ( 주 ) 거제조선소 한내부두 해상 에서 콘크리트 부유식 안벽시설의 사용성 , 안정성 및 안전성 등을 검토하기 위하여 다양한 파조건에 대한 실해역 파랑 응 답 실험을 수행한 바 있으며 , 이를 위하여 온도 , 풍향 등을 계 측하기 위한 AWS(Automatic Weathering System), 파고조건을 계측하기 위한 용량식 및 파압식 파고계 , 부유체의 응답을 계
측하기 위한 영상 기반 장비 , 가속도계 , MRU5, 그리고 RTK-
GPS 등을 설치하였다 . 또한 계류시스템의 요소인 펜더와 계류 삭에 작용하는 하중을 계측하기 위하여 펜더 반력계와 계류삭 에 대한 장력계를 설치하였다 . 여기서는 영상 기반의 동적변위
계측 결과를 기존 MRU5 와 RTK-GPS 장비를 이용하여 계측
한 결과와 비교하고 , 영상 기반 방법의 사용성 및 정확성을 검 토하는 것이 목적이므로 , 부유체의 응답을 계측하는 것에 관련 된 내용에 대해서만 설명하고자 한다 .
3.2 계측장비의 설치
부유체의 6 자유도 운동 계측 시 고려해야 할 사항으로 ,
부유체의 운동 특성과 계측 센서의 계측 성능 등이 있다 .
우선 운동 특성으로는 전후운동 (surge) 및 좌우운동 (sway),
요잉 (yawing) 과 같이 저주파수 대역의 표류 (drift) 운동 성분
과 상하운동 (heave), 횡동요 (rolling) 및 종동요 (pitching) 등
과 같이 주기 특성을 갖는 파주파수 성분으로 나눌 수 있다 .
한편 계측 센서의 성능으로는 RTK-GPS 의 경우 기본적으로 전후운동 , 좌우운동 , 상하운동 등의 병진운동 성분만을 계측
할 수 있고 , 한 대의 GPS 수신기를 추가 사용할 경우 회
surge x= 1,sway=x3,heave=(y1+y3)⁄2
pitch=(y3–y4) δ⁄ 34,roll=(y1–y2) δ⁄ 12 yaw x=( 1–x2)⁄δ12 or (x3–x4) δ⁄ 34
δ
ij그림 3. 3차원 운동 계측을 위한 최소 시스템 구성
그림 4. 영상 기반 구조물 동적 변위 계측 순서
표 1. 부유체의 응답을 계측하기 위한 계측장비
계측장비 목적
캠코더
Surge, Heave, Rolling, Yawing등
4자유도 운동 계측
MRU5
회전 운동
(Rolling, Pitching and Yawing) RTK-GPS병진 운동
(Surge, Sway and Heave)그림 5. 부유체의 동적응답을 계측하기 위한 장비
전운동성분까지 구할 수 있다 . 또한 RTK-GPS 의 특성상 수 직방향 변위에 대한 계측 정밀도가 낮은 단점이 있다 . MRU 의 경우 상대적으로 회전운동에 대한 계측 정확도가 높 고 , 병진운동의 경우 가속도를 두 번 적분하여 변위를 계산 하기 때문에 저주파수 잡음으로 인한 오차가 포함되어
RTK-GPS 보다는 정확도가 낮다 . 주파수 특성으로 본다면
RTK-GPS 가 저주파수 운동 계측에 적합하고 , MRU 가 상대
적으로 좀 더 높은 주파수 성분의 운동 계측에 유리하다 .
따라서 전후운동 , 좌우운동 , 요잉 등의 경우 RTK-GPS 가 더
욱 적합하다고 할 수 있으나 , 요잉을 RTK-GPS 로 계측하기
위해서는 추가적인 GPS 수신기가 필요하기 때문에 , 이 연구
에서는 MRU 를 이용하여 요잉을 계측하였다 . 한편 파주파수 운동 성분인 수직운동의 경우 주파수 특성으로는 MRU 로
계측하는 것이 좋을 수 있으나 , MRU 의 수직운동에 대한
계측 정밀도가 RTK-GPS 보다 낮기 때문에 이 연구에서는
RTK-GPS 를 이용하여 수직운동을 계측하고자 하였다 .
한편 , 이 연구에서 사용된 MRU 와 RTK-GPS 장비의 특성을
살펴보면 , MRU5 는 회전 운동의 경우 해상도는 0.001
o(1.74 × 10
−5rad) 이며 , 정확도 (accuracy) 는 0.02
o(3.48 × 10
−4rad)
의 범위이다 . 한편 수직운동의 경우 , 계측 범위와 정확도는 각
각 ± 50 m 와 5 cm 로 수 mm~cm 범위 수직운동을 갖는 본
실험에는 적합하지 않은 것으로 판단되었다 . 부유체의 병진 운 동에 대한 계측을 위하여 그림 5 에서와 같이 비교적 정밀도가
우수한 GPS 시스템인 RTK-GPS 를 선정하여 사용하였다 .
RTK-GPS 는 2 개의 GPS 시스템으로 구성되며 대상체의 동적응
답을 10 Hz 까지 샘플링 할 수 있고 , 이때 정확도는 ± 0.01 m
즉 1 cm 수준으로 MRU 보다 좋은 정확도를 가지고 있다 .
RTK-GPS 는 육상 측에 설치되는 GPS 기지국과 부유체에 설치
되는 GPS 이동국으로 구성되며 , 이동하지 않는 육상 측 GPS
기지국의 정적 위치를 이용하여 움직이는 부유체에 설치된
GPS 의 정밀도를 보정하는 GPS 시스템이다 . 한편 MRU 와
RTK-GPS 를 이용하여 부유체의 동적 운동을 정확하게 계측하
기 위해서는 부유체의 CG(Center of Gravity) 위치에 설치하
여야 하나 , 부유체가 길이 (50 m), 폭 (30 m) 에 비하여 높이 (5
m) 가 낮고 , 또한 GPS 의 경우 수신기를 부유체 내부에 설치하
기 어렵기 때문에 GPS 수신기 및 MRU 를 모두 부유체의 상
부 중앙에 설치하였다 .
한편 영상 기반의 부유체 동적 변위 계측을 위하여 그림
6 및 그림 7(a) 와 같이 부유체 상에 2 개의 표적을 설치하였
고 , 640 × 480 해상도로 초당 30 프레임을 기록할 수 있는 소
형 캠코더는 육상 측의 고정된 위치에 설치하였다 . 아래 그림
7 은 부유체의 동적 변위 계측을 위하여 기록한 영상의 일부
로 두 개의 표적을 한 화면에서 기록하였고 , 부유체의 중앙 에 위치한 표적은 상대적으로 정확한 변위를 얻을 수 있도 록 하는 반면 측면에 위치한 표적은 촬영 지점에서부터 거 리가 멀어 계측 정확도는 감소하게 된다 . 만약 표적의 크기 를 크게 한다면 오차를 줄이는 효과를 기대할 수 있으나 ,
이와 반대로 계측범위가 줄어들고 또한 mpp(mm per pixel)
자체가 개선되는 것은 아니기 때문에 정확도를 높이는 데에 는 한계가 있다 . 부유체 중앙에 설치한 표적 1 의 경우 해상 도가 2.89 mm/pixel 이며 , 편측에 설치한 표적 2 의 경우 5.52
mm/pixel 의 해상도를 가지고 있다 . 한 픽셀이 약 3 mm, 6
mm 의 실제 크기를 나타내므로 영상 기록 장치인 캠코더 자 체의 움직임이 전혀 없는 이상적인 경우 , 계측 해상도는 표
적에 따라 3 mm 와 6 mm 내외가 될 것이다 . 그러나 실제
영상 기반의 동적변위를 계측하는 과정에서는 원의 중심
(centroid) 을 추적하도록 하는 알고리즘을 적용함으로써 이보
다는 개선된 해상도를 가지게 된다 .
한편 , 영상 장비의 자체 진동이 변위 계측에 미치는 영향 을 분석하기 위하여 , 캠코더에 가속도계를 추가적으로 설치 하여 영상 장비 자체의 동적 특성을 분석하였다 . 변위 계측 중 영상 장비의 가속도 자료를 이용하여 구한 장비 자체의 고유주파수는 3.71 Hz 이며 , 해당 시간 동안의 가속도의
RMS 크기는 0.003 m/sec
2인 것으로 분석되었다 . 주파수 영
역에서의 가속도 크기 (
A( ω )) 를 이용하여 변위 (
D( ω )=
A( ω )/
그림 6. MRU와 RTK-GPS 및 영상 표적의 설치 위치
그림 7. 영상 기반 동적변위 계측을 위한 표적 및 캠코더의 설치
ω
2) 를 대략적으로 계산하면 ,
D=0.003/(2 π× 3.71)
2=5.5 ×10
−6(
m) 로 매우 미세한 진동임을 알 수 있다 . 이러한 확인 절차
는 영상 기반 변위 계측 결과의 성능을 개선시키는 것은 아 니지만 영상 기반 방법에 있어 중요한 영상 장비 자체의 진 동 특성을 분석하고 , 그 결과로부터 계측 자료의 유효성을 분석하는 데에는 매우 필요한 절차라고 할 수 있다 .
한편 , 부유체 상부에 설치한 표적 1 의 경우 가능한 상부 중앙에 위치시키는 것이 바람직하나 , 해당 위치에는 MRU,
RTK-GPS, 데이터 취득 및 처리 장치 등이 설치되어 있고 ,
또한 이들을 바람 및 비 등으로부터 보호하기 위하여 천막 을 설치한 상태로 표적 설치가 어려워 , 표적 1 은 중앙에서 2 m 떨어진 지점에 설치하였고 , 또 다른 표적 2 은 사진에서와
같이 15 m 이격된 편측에 설치하였다 . 이중 표적 1 을 이용하
여 전후운동 (surge) 과 상하운동 (heave) 을 계측하였고 , 두 표 적 사이의 상대변위를 이용하여 횡동요 (rolling) 및 요잉
(yawing) 의 회전운동을 계측하였다 . 캠코더를 2 개 운영할 경
우 6 자유도 운동을 계측할 수 있으나 , 이 연구에서는 적용 가능성을 검토하기 위하여 캠코더 1 개를 이용하여 4 자유도 변위만을 계측하였다 .
3.3 입사파 조건
부유식 안벽을 현장에 설치하기 전에 소형 선박 3 척을 이 용하여 항주파를 생성하고 , 이러한 항주파를 입사파로 고려 하여 각 설계조건 별 입사파의 통계 특성치를 분석하였다 .
이 연구에서는 입사파가 구조물에 직각 입사 하는 경우와 경사 입사 하는 두 가지 경우에 대하여 항주파를 발생시킬 수 있도록 선박의 경로를 결정하였으며 , 입사파에 대한 결과
분석을 위하여 DW(Directional Waverider) 를 사용하였다 .
다만 여기서는 모든 입사파 조건에 대한 결과를 제시하기 보다는 직각입사 시의 결과만을 제시하고자 하였고 ( 그림 8
참조 ), 직각 입사 시의 항주파 생성조건과 실제 생성된 입사
파의 조건은 다음 표 2 와 같다 .
3.4 영상장비 및 RTK-GPS, MRU 장비에 의한 운동 계측 결과
영상 기반의 동적변위 계측을 위하여 전술할 바와 같이
표적 내의 배경과 실제 이동을 추적할 원 또는 기타 형태의 인식자를 구분하는 것이 중요하다 . 이는 배경과 인식자 사이 의 밝기 차이를 최대화하고 , 이러한 밝기를 이용하여 임계값 을 정하는 것이 일반적이다 . 다음 그림 9(a) 는 이러한 임계 값을 0.5 에서 0.8 로 증가시켜 가며 변환행렬을 구하는데 사
표 2. 항주파에 의한 입사파 생성 조건
선속
(km/h)H
s(m)T
p(s)T
z(s)H
1/3(m) (s)18 0.287 3.25 2.51 0.283 2.81
22 0.374 3.71 2.75 0.367 3.10
24 0.383 3.70 2.88 0.368 3.19
T
H1 3⁄그림 8. 선박 속도에 따른 파고 및 스펙트럼 함수 ( 직각입사파의 경우 )
그림 9. 임계값 설정에 따른 DEI 값의 분포 및 각 방법에 따른
임계값 계산 결과
용하지 않은 네 번째 인식자를 이용하여 구한 변위오차지수
(DEI) 값을 계산한 결과이며 , 이 결과에 따르면 임계값이
0.655 일 경우 DEI 값이 0.007 로 최소가 됨을 알 수 있다 .
DEI 값이 0.007 이 의미하는 바는 세 개의 인식자를 이용하
여 변환행렬을 구하고 , 이 변환행렬을 이용하여 네 번째 인 식자의 위치를 추적하였을 때 , 그 위치의 오차가 0.007 cm
라는 것으로 매우 정밀한 수준임을 의미한다 . 한편 Otsu 와
Lee 등이 제안한 방법으로 구한 최적임계값은 각각 0.592,
0.554 로서 이와 같은 임계값을 적용했을 때의 DEI 값은 약
0.1 cm, 0.06 cm 로 제안 방법에 의한 DEI 값보다는 크지만
여전히 매우 합리적인 수준의 오차 수준을 가지고 있음을 알 수 있다 . 이 연구에서는 제안 방법을 이용하여 결정한 임계값을 이용하여 이후의 영상 기반 동적변위를 계측하는 데 사용하였다 .
다음 그림 10, 11, 12 는 각각 선박의 속도를 18 km/h,
22 km/h, 24 km/h 로 유지하여 , 항주파를 생성한 후 , 해당되 는 파고조건에서의 부유체의 운동을 계측한 결과를 시계열
자료와 FFT 분석을 통한 주파수 성분 자료로 정리한 그림
이다 . 그림에서 상하운동과 전후운동과 같은 병진 운동의 경
우 RTK-GPS 결과를 영상 기반 계측 결과와 비교하였으며 ,
그림 10. 선박 속도가 18 km/h 인 경우 , 부유체의 동적운동 계측 결과
횡동요와 요잉과 같은 회전 운동의 경우 MRU 결과를 이용 하여 영상 기반 계측 결과와 비교하였다 .
우선 , 시계열 자료를 통하여 전체적인 경향을 살펴보면 다
음과 같다 . 부유체 상하운동의 경우 , 선박의 속도를 18 km/
h 에서 22 km/h, 24 km/h 로 증가시키더라도 전체적인 상하운
동 폭은 약 4 cm 내로 매우 제한적인 것으로 분석되었다 . 그
러나 각 계측 방법의 결과를 좀 더 살펴보면 , 영상 기반 계
측 결과의 경우 150 초 ~180 초 정도의 매우 긴 장주기 성분
의 진폭이 4 cm 내외이며 , 주기 7 초 내의 운동 성분은 매
우 작은 것으로 분석되었다 . 그러나 RTK-GPS 에 의한 상하 운동 계측 결과는 그 폭은 유사하지만 , 영상 기반 계측결과
와는 달리 주기 150~180 초 사이의 장주기 성분의 진폭이
아닌 단주기 성분의 진폭이 4 cm 내외로 나타나고 있다 . 이
는 계측오차로 사료되며 , 10 Hz 로 동적 거동을 계측할 때
정확도가 10 mm 내외인 RTK-GPS 을 이용하여 수 cm 내
외의 상하운동을 계측하기는 매우 어려운 것으로 판단할 수 있다 . 또한 MRU 의 경우에도 상하운동에 대한 해상도가 5 cm 내외로 RTK-GPS 와 MRU 모두 수 mm~ 수 cm 내의
미소한 상하운동 계측에는 부적합함을 알 수 있다 . 그러나 이러한 계측오차는 부유체의 운동이 가장 큰 경우 , 즉 선박
의 속도를 24 km/h 로 한 경우 많이 감소하는 것을 알 수
있다 .
그림 11. 선박 속도가 22 km/h 인 경우 , 부유체의 동적운동 계측 결과
한편 수평방향 운동인 전후운동의 경우 선박 속도에 무관
하게 상당히 큰 표류 (drift) 운동을 하는 것으로 분석되었다 .
전후운동의 경우 전체적인 운동의 크기도 수십 cm 이상으로 상대적으로 상하운동에 비하여 클 뿐만 아니라 RTK-GPS 의 전후운동에 대한 계측 성능도 상하운동에 비하여 우수하므 로 , 이 경우에는 영상 기반 계측 결과와 상당히 일치하는
결과를 얻을 수 있었다 . 그러나 FFT 결과를 통하여 입사파
에 의한 파랑응답을 분석할 때 영상 기반 계측 결과와 상당 히 큰 차이가 있다 . 이는 표류운동의 경우 매우 긴 주기의 운동이 지배적이며 , 수 초 주기의 단주기 성분은 상대적으로 그 크기가 작고 , 또한 두 방법에 의한 결과가 상이함을 의 미한다 .
한편 횡동요와 요잉의 경우 , 영상 기반 계측 자료를
MRU 에 의한 계측결과와 비교하였다 . 기본적으로 자이로 효 과를 이용하는 MRU 의 경우 회전운동에 대한 계측 정밀도 가 매우 우수한 것으로 알려져 있으며 , 이 연구에서도
MRU 의 계측결과와 영상 기반 계측결과가 매우 잘 일치하는
것으로 분석되었다 . 계측 방식이 전혀 다른 MRU 계측결과
와 영상 기반 계측결과가 서로 잘 일치한다는 것은 간접적
으로 영상 기반 계측결과가 실제 부유체의 운동을 정확하게
계측하고 있음을 의미하며 , 또한 영상 기반 장치의 경우 두
개의 표적을 이용하여 그 상대 변위를 이용하여 회전 변위
를 분석하고 있기 때문에 , 두 개 표적의 병진 운동 역시 정
확하게 계측한 것으로 판단할 수 있다 . 이와 같은 사실을
그림 12. 선박 속도가 24 km/h 인 경우 , 부유체의 동적운동 계측 결과
바탕으로 RTK-GPS 의 계측성능을 다시 평가해 보면 RTK-
GPS 는 대변위를 평가하는 경우 , 예를 들어 항행 선박의 위
치를 추적하거나 , 또는 교량의 연중 처짐 변화 등을 평가하 는 데에는 충분히 적용할 수 있지만 수 mm 에서 수 cm 의 동적변위를 갖는 구조물에 대한 동적 계측에는 많은 어려움 이 있음을 알 수 있다 .
정량적인 분석을 위하여 RMSD(Root Mean of Squared
Deviations) 값을 변형하여 두 자료의 차이를 분석하였다 . 기
본적으로 RMSD 는 절대적인 값을 나타내므로 상대오차 등
을 표현하기에 부적절하며 , 따라서 RMSD 값을 다음의 식
(12) 과 같이 x와 y값의 Norm 으로 나누어 주어 상대적인
값을 나타낼 수 있도록 하고 , 이를 ReRMSD(Relative
RMSD) 로 정의하였다 .
(11)
(12)
표 3 에서는 선박의 운항 설계 속도에 따른 영상 기반 변 위 계측결과와 기존 장비 계측결과 사이의 ReRMSD 값을 정리하였다 . 표 3 을 통하여 , 비교적 두 자료의 차이가 크지
않은 횡동요와 요잉에 대하여 MRU 계측결과와 영상 기반
계측결과 사이의 ReRMSD 값은 13.5~22.3% 의 값을 가지고
있으며 , 상하운동과 전후운동의 경우에는 36.8~192.9% 의 차
RMSD x y( , ) (x i( ) y i()– )2 i 1=
∑N
⎝ ⎠
⎜ ⎟
⎛ ⎞
N
⁄
=
ReRMSD x y( , )
x i( ) y i()–
( )2
i 1=
∑N
x i( )2 i 1=
∑N y i()2
i 1=
∑N
⋅ ---
⎝ ⎠
⎜ ⎟
⎜ ⎟
⎜ ⎟
⎜ ⎟
⎜ ⎟
⎜ ⎟
⎛ ⎞1 2⁄
100( )%
×
=
그림 13. 영상 기반 계측 자료의 선박 속도별 각 운동 성분의 FFT 분석 결과
그림 14. GPS 및 MRU 계측 자료의 선박 속도별 각 운동 성분의 FFT 분석 결과
이가 있음을 알 수 있다 . 한 가지 특이한 점은 횡동요나 요
잉의 경우 ReRMSD 값이 파조건에 상관없이 유사한 수준
의 값을 가지는 데 비하여 , 상하운동의 경우 파조건이 커질
수록 , 즉 부유체의 운동이 커질수록 ReRMSD 값이 크게
줄어드는 것을 알 수 있다 . 즉 선박의 속도가 18 km/h 일 경우
ReRMSD 값이 193% 수준이었으나 , 선박의 속도를 22 km/h,
24 km/h 로 증가시켜 파조건을 크게 할 경우 , 이 값이
109.8%, 36.8% 로 크게 감소되었다 . 이는 곧 RTK-GPS 로
계측 가능한 수준의 부유체 운동이 발생하는 경우 , 정확한 계측이 가능해 짐을 의미한다고 할 수 있다 .
4. 결 론
이 연구를 통하여 (1) 표적을 이용한 영상 기반 계측 시
표적과 배경을 구분하는 임계값을 화상 자체 자료가 아닌 변위 계측 시의 계측오차를 이용하여 결정할 수 있도록 개 선하였으며 , 이를 적용하여 기존의 임계값 결정 방법에 의한 임계값과 비교하였을 때 상대적으로 계측오차가 작음을 확
인하였다 . 또한 (2) 여러 표적을 동시에 촬영함으로써 구조
물의 회전변위를 효과적으로 계측할 수 있는 방법을 제안하 였고 , 이를 부유체 구조물에 적용하여 그 정확성을 검증하였
다 . 또한 이러한 연구결과를 바탕으로 영상 기반 동적변위
계측 시스템이 기존의 RTK-GPS 나 MRU 등을 이용한 부유
체 응답 계측보다 경제적이며 , 또한 정확성이 높음을 제시하 였다 .
또한 이 연구에서 비교한 RTK-GPS 와 MRU 장비의 경우
기본적으로 RTK-GPS 는 GPS 위성 자료를 수신하여 위치를 재계산하는 시스템으로 수직변위에 대한 정밀도가 수평변위 에 대한 정밀도보다 낮고 , 또한 정적변위 계측 시에 비하여
동적변위 계측이 해상도 및 정밀도가 더욱 낮아지는 기술적
어려움이 있다 . 다만 RTK-GPS 는 육상에서부터 상당한 거리
에 있는 해상에서도 수 cm 단위의 동적변위를 계측할 수 있는 유일한 계측시스템이라 할 수 있을 것이다 . 한편 MRU 의 경우 자이로스코프 효과 (Gyroscopic Effect) 를 이용 하는 시스템으로 회전운동에 대한 계측 정밀도는 매우 높은 편이나 , 병진운동에 대한 계측은 가속도를 두 번 적분하여 변위를 구하기 때문에 저주파수 대역에서의 오차가 크고 , 따
라서 회전운동의 경우에만 상당한 정밀도를 가지고 계측이 가능한 시스템이라 할 수 있다 .
현재 부유체의 동적 거동과 같이 접촉식 센서를 적용하기 어려운 경우 , 적용 가능한 비접촉식 센서로는 이 연구에서
사용한 바와 같은 RTK-GPS 센서 , MRU, 그리고 영상 기
반 장비 등이 있으며 , 따라서 작업 여건과 필요한 정밀도와 정확도 등을 고려하여 센서를 선정하는 것이 중요할 것으로 판단된다 . 영상 기반 장비의 경우 다른 두 장비에 비하여 매우 경제적인 설치 및 운영이 가능하며 , 정확도와 정밀도 역시 매우 뛰어나지만 현재로서는 장기 모니터링이 어렵고 ,
고정된 설치지점이 필요하여 육상에서 가까운 해상에서의 부 유체 거동만을 계측할 수 있는 단점이 있으므로 , 향후에는 이러한 문제를 해결할 수 있는 연구가 필요할 것이다 .
감사의 글
본 연구는 국토해양부 “ 지능형 항만물류시스템 기술개발 -
초대형 컨테이너선용 하이브리드 안벽 기술개발 ” 사업의 연
구비 지원 (PM54651) 에 의해 수행되었습니다 .
참고문헌
권순덕
,이종운
,도영수
,김정행
(2002)영상처리를 통한 교량 진 동 측정
.대한토목학회 정기학술대회논문집
,대한토목학회
, pp.525-528.
김기영
,곽문규
(2005)영상 처리 방법을 이용한 구조물의 큰 변
위 저주파 진동 계측
.한국소음진동공학회논문집
,한국소음진 동공학회
,제
15권 제
3호
, pp. 329-333.김성완
,김남식
(2009) Digital Image Correlation기법을 이용한
구조물의 다중 동적변위응답 측정
.한국지진공학회논문집
,한 국지진공학회
,제
13권 제
3호
, pp. 11-19.김성완
,김남식
(2010)영상처리기법을 이용한 다중 변위응답 측
정 알고리즘의 검증
,대한토목학회 논문집
,대한토목학회
,제
30권 제
3A호
, pp. 297-307.김정태
,박재형
,홍동수
,나원배
(2008)가속도 및 임피던스 신호
를 이용한
PSC거더교의 하이브리드 손상 모니터링 체계
,대한토목학회 논문집
,대한토목학회
,제
28권 제
1A호
, pp.135-146.
박종웅
,정형조
,이종재
(2009)분절화 기법을 이용한 대형 구조 물의 영상처리 기반 변위 측정 방법
,2009 대한토목학회 정 기학술대회 논문집
,대한토목학회
, pp. 352-355.이창복
,안세호
,양성훈
,염정원
,강동욱
,김기두
(2004)레이저와
고속
CCD카메라를 이용한 대형구조물 의 진동계측
.한국
통신학회논문지
,한국통신학회
,제
29권 제
8C호
, pp. 1104- 1112.이호철
,윤홍식
(2001) GPS와
Internet을 이용한 장대교량 모니터 링 시스템 개발에 관한 연구
,대한토목학회 논문집
,대한토목 학회
,제
21권 제
6D호
, pp. 875-883.Celibi, M. (2000) GPS in dynamic monitoring of long-period struc- tures, Soil Dynamics & Earthquake Engineering, Vol. 20, pp.
477-483.
Choi, H.-S., Cheung, J.-H., Kim, S.-H., and Ahn, J.-H. (2011) Structural dynamic displacement vision system using digital image processing, NDT&E International, Vol. 44, pp. 597-608.
Ji, Y.F. and Chang, C.C. (2008) Nontarget image-based technique for small cable vibration measurement. Journal of Bridge Engi- neering, Vol. 13, No. 1, pp. 34-42.
Lee, J.J. and Shinozuka, M. (2006a) Real-time displacement of a flexural bridge using digital image processing technique.
Experimental Mechanics, Vol. 46, pp. 105-114.
Lee, J.J. and Shinozuka, M. (2006b) A vision-based system for remote sensing of bridge, NDT&E International, Vol. 39, No.
5, pp. 425-431.
Lee, J.J., Fukuda, Y., Shinozuka, M., Cho, S., and Yun, C.-B.
(2007) Development and application of a vision-based dis- placement measurement system for structural health monitor-
표 3. 선박의 운항 설계 속도에 따른 영상 기반 변위 계측결과와
기존 장비 계측결과 사이의 ReRMSD 값
운동 성분 선박의 운항 설계 속도
18 km/h 22 km/h 24 km/h
수직운동
(heave) 192.9 109.8 36.8전후운동
(surge) 101.5 74.9 66.7횡동요
(rolling) 15.7 13.5 18.0요잉
(yawing) 20.3 20.7 22.3ing of civil structures, Smart Structures and Systems, Vol. 3, No. 3, pp. 373-384.
Nassif, H. H., Gindy, M., and Davis, J. (2005) Comparison of laser Doppler vibrometer with contact sensors for monitoring bridge deflection and vibration, NDT&E International, Vol. 38, pp.
213-218.
Otsu, N. (1979) A threshold selection method from gray-level his- tograms, IEEE Transaction on Systems, Man, and Cybernetics,
Vol. SMC-9, No. 1, January 1979.
Park, J.-W., Lee, J.J., Jung, H.-J., and Myung, H. (2010) Vision- based displacement measurement method for high-rise build- ing structures using partitioning approach, NDT&E Interna- tional, Vol. 43, pp. 642-647.
(