저작자표시-비영리-동일조건변경허락 2.0 대한민국 이용자는 아래의 조건을 따르는 경우에 한하여 자유롭게 l 이 저작물을 복제, 배포, 전송, 전시, 공연 및 방송할 수 있습니다. l 이차적 저작물을 작성할 수 있습니다. 다음과 같은 조건을 따라야 합니다: l 귀하는, 이 저작물의 재이용이나 배포의 경우, 이 저작물에 적용된 이용허락조건 을 명확하게 나타내어야 합니다. l 저작권자로부터 별도의 허가를 받으면 이러한 조건들은 적용되지 않습니다. 저작권법에 따른 이용자의 권리는 위의 내용에 의하여 영향을 받지 않습니다. 이것은 이용허락규약(Legal Code)을 이해하기 쉽게 요약한 것입니다. Disclaimer 저작자표시. 귀하는 원저작자를 표시하여야 합니다. 비영리. 귀하는 이 저작물을 영리 목적으로 이용할 수 없습니다. 동일조건변경허락. 귀하가 이 저작물을 개작, 변형 또는 가공했을 경우 에는, 이 저작물과 동일한 이용허락조건하에서만 배포할 수 있습니다.
공학박사학위논문
연결, 소통, 복제 기능이 강화된
농업시스템응용플랫폼의 개발
Development of Agricultural Systems
Application Platform enhancing Connection,
Communication, and Cloning
2014 년 8 월
서울대학교 대학원
생태조경·지역시스템공학부
연결, 소통, 복제 기능이 강화된
농업시스템응용플랫폼의 개발
Development of Agricultural Systems
Application Platform enhancing Connection,
Communication, and Cloning
지도 교수 이 정 재
이 논문을 공학박사 학위논문으로 제출함
2014 년 6 월
서울대학교 대학원
생태조경·지역시스템공학부 지역시스템공학전공
김 태 곤
김태곤의 공학박사 학위논문을 인준함
2014 년 7 월
위 원 장 (인)
부위원장 (인)
위 원 (인)
위 원 (인)
위 원 (인)
초 록
시스템 시뮬레이션은 구성요소의 거동을 모델링하고, 구성 요소간의 관계를 정의함으로써 구현된다. 일반적으로 관계를 정의하는 과정에서 복잡도가 증가되어 시스템 시뮬레이션 모델을 구성하기가 어렵다. 복잡도 문제를 해결하기 위하여 절차적 방식의 프로그래밍 패러다임은 객체지향 프로그래밍 패러다임으로 발전하였다. 그러나 객체지향 패러다임을 이용하여 개발된 많은 연구들이 여러 요소를 결합하는 과정에서 절차적 방식으로 환원되어 결과적으로 독립성은 저해하고, 여전히 복잡도를 해결하지 못하였다. 이러한 문제를 해결하기 위하여 다양한 시스템 시뮬레이션 도구들의 기능을 검토하고, 복잡하면서도 성공적인 시스템인 생명체의 거동을 분석하여 시스템 시뮬레이션 도구가 갖추어야 할 기능을 도출하였다. 모델의 독립성을 유지하고, 복잡도를 낮추어 시스템 시뮬레이션을 수행할 수 있는 범용 농업시스템 시뮬레이터 (Generic Agricultural Systems Simulator, GASS)의 단위 객체의 독립성을 유지하기 위한 일방향 정보전달기법을 주요한 기능으로 채택하였다. 또한 생명체가 생명을 유지하는 과정에서 다음 3가지 거동 특성을 갖는다고 분석하였다. 첫째, 시스템을 구성하는 요소는 기본적으로 인접한 요소 간에 정보를 교환하지만, 일부는 거리와 무관하게 연결된다. 둘째, 같은 구성요소라도 소속 그룹에 따라 소통의 행태가 달라진다. 셋째, 시스템의 구조는 거시적으로 고정된 형태를 지니지만, 요소의 복제, 소멸을 통하여 경계가 지속적으로 변화한다. 본 연구에서는 앞서 도출한 기능을 바탕으로, 3가지 주요 특징인 연결성(Connection), 소통구조(Communication), 복제 기능(Cloning), 즉 3C을 강화한농업시스템응용플랫폼(Agricultural Systems Application Platform, ASAP)을 개발하였다. 네트워크를 이용하여 인접성에 기반한 물리구조와 위상관계에 기반한 정보구조를 동시에 표현하고, 동질소통구조와 이질소통구조를 모두 반영할 수 있도록 프로그램을
위한 컴포넌트 작성 프로토콜 및 연구자를 위한 컴포넌트 활용 프로토콜을 설명하고, 사용자 편의를 고려한 유틸리티를 기술하였다. 개발된 농업시스템응용플랫폼의 적용성을 검토하고자 다양한 지역 시스템 공학 문제를 풀이하였다. 모형의 적용은 기존 모델과 비교하여, 간단한 모델 구현과 시뮬레이션 구동단계를 거쳐 동일한 분석 결과를 확인함으로써 검증하였다. 연구 결과를 바탕으로 수학적, 공학적 기법을 이용한 하향식 모델링 방식에서 시뮬레이션 기법을 통한 상향식 모델링 방식이 가능하였다. 향후 개발한 컴포넌트의 배포를 진작하여, 모델 갱신과 지식 공유를 통한 지역시스템 공학의 발전을 기대한다. 주요어 : 연결, 소통, 복제, 객체 지향, 시스템 시뮬레이션, 플랫폼 학 번 : 2007-30313
목 차
제 1 장 서 론
... 1
1.1 연구 배경 ... 1 1.2 연구 내용 및 범위 ... 2 1.3 논문 구성 ... 3제 2 장 시스템 시뮬레이터
... 5
2.1 지역시스템과 시스템 시뮬레이터 ... 5 2.2 다양한 시스템 시뮬레이션 도구 ... 6 2.3 GASS ... 8 2.3.1 개요 ... 8 2.3.2 인접성 ... 10 2.3.3 속성정보 관리 ... 11 2.4 시스템 시뮬레이션 도구의 한계 ... 12제 3 장 ASAP의 개발
... 17
3.1 발전된 시뮬레이션 프로토콜 ... 17 3.1.1 연결 프로토콜 ... 17 3.1.2 소통 프로토콜 ... 18 3.1.3 복제 프로토콜 ... 19 3.2 시뮬레이터의 설계 ... 21 3.2.1 컴포넌트 개발 프로토콜 ... 21 3.2.2 컴포넌트 이용 프로토콜 ... 22 3.2.3 시뮬레이션 유틸리티 ... 23 3.3 연결성에 대한 검토 ... 25 3.3.1 물리구조로 연결된 시스템 ... 25 3.3.2 위상구조로 연결된 시스템 ... 27 3.3.3 혼합 시스템... 29 3.4 소통구조에 대한 검토 ... 30 3.4.1 동질소통구조에서의 속성 ... 30 3.4.2 이질소통구조에서의 속성 ... 32 3.5 복제 기능에 대한 검토 ... 35 3.5.1 복제 기능을 통한 프랙탈 구조 재현 ... 35 3.5.2 네트워크 시스템의 전처리 ... 36 3.6 ASAP의 구현 ... 37제 4 장 지역시스템 문제의 적용
... 41
4.1 서론 ... 41 4.2 모델 구현과 구동... 42 4.3 동질소통을 하는 위상구조 ... 45 4.3.1 문제 선정 ... 45 4.3.2 연결된 저수조의 수위해석 ... 45 4.3.3 삼형제 저수지의 수위 모의 ... 56 4.4 동질소통을 하는 물리구조 ... 61 4.4.1 문제 선정 ... 61 4.4.2 연직배수를 고려한 1차원 토질 압밀 ... 61 4.4.3 점적 관개에 의한 토양수분 모의 ... 67 4.4.4 배수갑문 염해 모의 ... 77 4.5 이질소통을 하는 위상구조 ... 85 4.5.1 문제 선정 ... 85 4.5.2 전염확률을 고려한 감염농가 확산 ... 85 4.6 이질소통을 하는 물리구조 ... 85 4.6.1 문제 선정 ... 92 4.6.2 트러스 구조의 해석 ... 92 4.7 복제기능을 통해 성장하는 시스템 ...104 4.7.1 문제 선정 ...104 4.7.2 초목의 성장모의...104 4.7.3 전처리 기능을 활용한 등가트러스 해석...107 4.8 소결 ...109제 5 장 결 론
... 110
5.1 요약 및 결론 ...110 5.2 향후 연구과제 ...114참고문헌 ... 115
Abstract ... 121
표 목차
TABLE 1COMPARISON OF GASS COMPONENTS AND CELLS ... 14
TABLE 2RESERVED WORDS FOR ASAP ... 22
TABLE 3CLASSIFICATION OF EXAMPLE PROBLEMS... 41
TABLE 4WATERSHED CHARACTERISTICS OF THREE RESERVOIRS ... 57
TABLE 5LEVEL-STORAGE (M-103M3) LOOKUP TABLE FOR THREE RESERVOIRS ... 58
TABLE 6SOIL HYDRAULIC PARAMETERS FOR TEXTURAL CLASS (CHOI ET AL.,2012) ... 74
TABLE 7PROPERTIES OF NODES AND EDGES FOR 5-TRUSS PROBLEM ... 98
그림 목차
FIGURE 1SIMILAR FOR SYSTEM ENGINEERING ... 5
FIGURE 2CONCEPT OF UNIDIRECTIONAL INFORMATION FETCH SCHEME (YI,2003)... 9
FIGURE 3SCHEMATIC VIEW OF ESTABLISHED SIMULATION MODEL (YI,2003) ... 11
FIGURE 4CONCEPT DIAGRAM OF HOMOGENEOUS STRUCTURE FOR COMMUNICATION ... 19
FIGURE 5CONCEPT DIAGRAM OF HETEROGENEOUS STRUCTURE FOR COMMUNICATION . 19 FIGURE 6CLASS DIAGRAM OF MAIN CLASS AND COMPONENT INTERFACE ... 21
FIGURE 7PROBLEM OF 2D HEAT CONDUCTION (KIM,2007) ... 26
FIGURE 8RESULTS OF 2D HEAT CONDUCTION PROBLEM USING ASAP ... 27
FIGURE 9RESULTS OF STOCHASTIC PERT ... 27
FIGURE 10NETWORK VIEW FOR HEAT CONDUCTION WITH CONTROLLER ... 29
FIGURE 11RESULT OF GRID TEMPERATURE WITH CONTROLLER ... 30
FIGURE 12PROBLEM OF TRUSS MEMBER FORCE ... 31
FIGURE 13SIMULATION VIEWER TO SOLVE TRUSS MEMBER FORCE ... 32
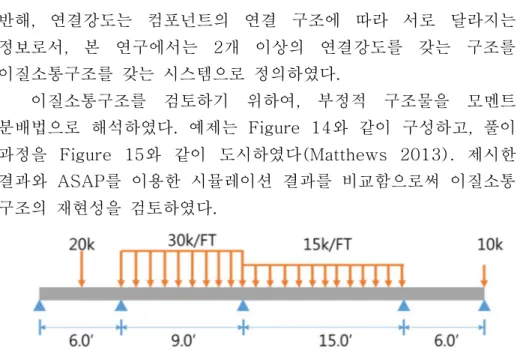
FIGURE 14PROBLEM FOR MOMENT DISTRIBUTION METHOD ... 33
FIGURE 15SOLUTION FOR MOMENT DISTRIBUTION METHOD ... 33
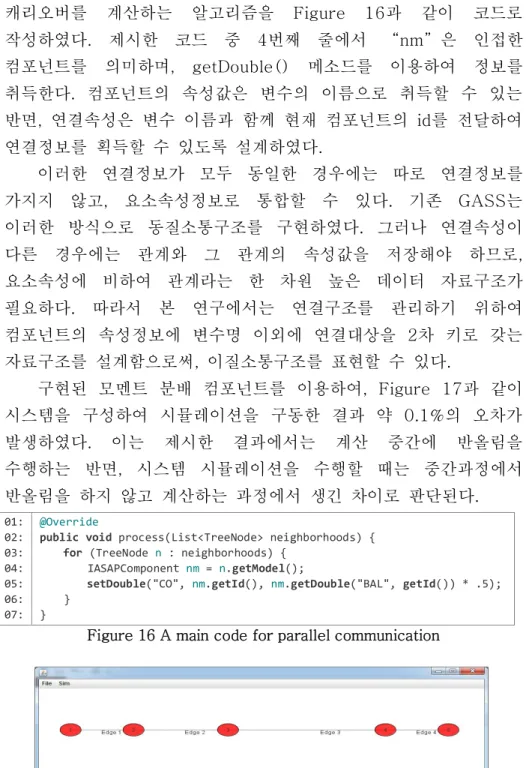
FIGURE 16A MAIN CODE FOR PARALLEL COMMUNICATION ... 34
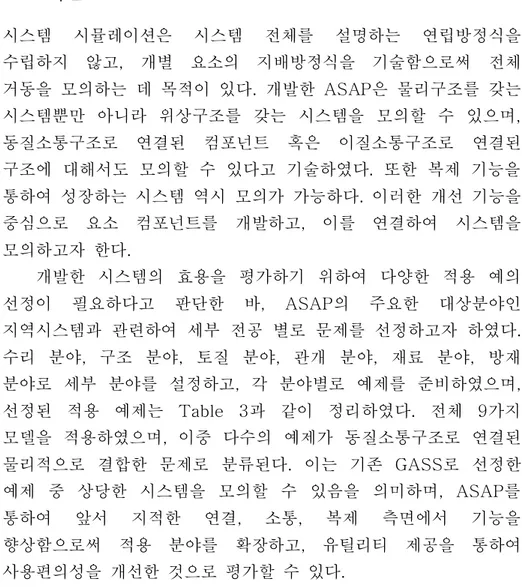
FIGURE 17SIMULATION VIEWER TO SOLVE MOMENT DISTRIBUTION PROBLEM ... 34
FIGURE 18SIMULATION FOR LINDENMAYER SYSTEMS... 35
FIGURE 19CLASS DIAGRAM RELATED WITH SIMULATOR ENVIRONMENT ... 38
FIGURE 20CLASS DIAGRAM RELATED TO IMPLEMENT SYSTEM MODELS ... 40
FIGURE 21A MAIN CODE FOR SETTING SIMULATION ENVIRONMENT ... 44
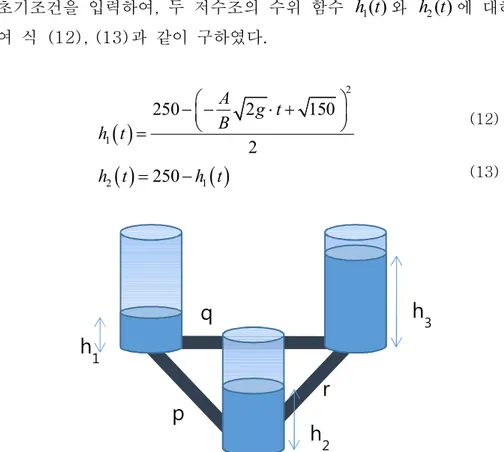
FIGURE 22PROBLEM FOR WATER HEIGHT FUNCTION OF ONE TANK ... 46
FIGURE 23PROBLEM FOR WATER HEIGHT FUNCTION OF TWO TANKS ... 48
FIGURE 24PROBLEM FOR WATER HEIGHT FUNCTION OF THREE TANKS ... 49
FIGURE 25PROGRAM CODE FOR WATER HEIGHT PROBLEM WITH LINKED TANKS ... 51
FIGURE 26SCREENSHOTS OF ASAP FOR TWO TANKS PROBLEM ... 52
FIGURE 27COMPARISON OF SIMULATED RESULT TO ANALYTIC RESULT ... 53
FIGURE 28SIMULATION MODEL RESULTS RELATED TO DELTA TIME ... 54
FIGURE 29SIMULATED WATER HEIGHT FOR THREE TANKS PROBLEM ... 55
FIGURE 30MAP OF THREE RESERVOIRS ... 56
FIGURE 31SIMULATED RESULTS OF WEATHER AND WATERSHED COMPONENTS ... 58
FIGURE 32WATER LEVEL SIMULATION FOR LINKED THREE RESERVOIRS ... 59
FIGURE 34SCATTER PLOT BETWEEN OBSERVED AND SIMULATED LEVEL ... 61
FIGURE 35DEPTH-TIME GRID FOR SIMULATING CONSOLIDATION ... 65
FIGURE 36A MAIN CODE OF CONSOLIDATION COMPONENT ... 66
FIGURE 37RESULTS OF CONSOLIDATION PROBLEM USING ASAP ... 66
FIGURE 38A MAIN CODE OF DISTRIBUTION COMPONENT FOR SOIL WATER ... 73
FIGURE 39SIMULATED RESULTS OF SOIL MOISTURE DISTRIBUTION (4HR IRRIGATION) ... 76
FIGURE 40EXPLICIT FINITE DIFFERENCE METHOD ... 80
FIGURE 41A MAIN CODE OF CHLORIDE PENETRATION COMPONENT... 80
FIGURE 42MODELLING FOR CHLORIDE ATTACK OF MARINE CONCRETE STRUCTURE ... 81
FIGURE 43CHLORIDE ATTACK PROGRESS ON THE CORNER AT 1ST YEAR,10 YEARS LATER, AND 20 YEARS LATER ... 82
FIGURE 44CHLORIDE ATTACK PROGRESS AT A 10CM DEEP POINT FROM SURFACE WITHOUT REPAIR OR RECOVER TREATMENT ... 82
FIGURE 45CHLORIDE ATTACK AND REPAIR PROGRESS AT 19 YEARS LATER,20 YEARS LATER, AND 21 YEARS LATER ... 83
FIGURE 46CHLORIDE ATTACK PROGRESS CONSIDERING REPAIR EVERY 20 YEARS AT A 10CM DEEP POINT FROM SURFACE WITHOUT REPAIR OR RECOVER TREATMENT ... 84
FIGURE 47A MAIN CODE OF INFECTION COMPONENT ... 87
FIGURE 48INITIAL CONDITION OF NETWORK MODEL FOR HPAI INFECTION ... 88
FIGURE 49LINK WEIGHTS FOR INFECTION IN 39 NODES ... 89
FIGURE 50SIMULATED NETWORK ABOUT INFECTION STATUS OF STOCKBREEDING ... 90
FIGURE 51NUMBER OF INFECTIVE STOCKBREEDING ... 91
FIGURE 52A BASIC FORM AND A UNIT COMPONENT OF 2D TRUSS STRUCTURE ... 93
FIGURE 53A MAIN PROGRAM CODE FOR TRUSS NODE COMPONENT ... 96
FIGURE 54TEN BAR PROBLEM AND SOLUTION (THIS STUDY) ... 97
FIGURE 55PROBLEM SET FOR 5-TRUSS STRUCTURE... 97
FIGURE 56A MAIN PROGRAM TO SET UP PROBLEM ... 99
FIGURE 57RESULTS OF 5-TRUSS PROBLEM USING ASAP ... 100
FIGURE 58EXAMPLE FOR 11-TRUSS STRUCTURE ... 101
FIGURE 59FLOW CHART OF FEM AND TRUSS SIMULATION WITH ASAP ... 102
FIGURE 60A MAIN PROGRAM CODE FOR PLANT GROWTH... 105
FIGURE 61SIMULATION FOR PLANT GROWTH BASED ON L-SYSTEMS ... 107
제 1 장 서 론
1.1 연구 배경
지역시스템공학은 지역의 자원 및 공간을 효과적으로 활용하기 위하여 시스템 공학을 적용하는 학문으로, 시스템을 구성하는 요소와 구성요소 간의 상호작용을 분석하는 시스템 공학적 과정이 중요하다. 시스템공학은 문제를 해결하기 위해서 대안을 분석하고, 시스템을 모델링하여, 요소를 결합하고, 구성된 시스템을 구동하여, 그 결과를 평가하는 과정으로 이루어진다(Bahill and Gissing 1998). 이러한 과정을 지역시스템 분야에 접목하기 위해서는 연구자가 쉽게 모델을 구성하고 모의할 필요가 있어 시스템 시뮬레이션 분야가 주목을 받게 되었다. 시스템 시뮬레이션 모델을 만들기 위한 노력은 일반적으로 심각하게 복잡하고, 활용분야로 한정되거나, 유지보수가 어려운 모델이 되기 쉽다(Jones et al. 2001). 이런 어려움을 해결하고자 많은 연구자들은 객체지향 프로그래밍 패러다임과 같은 소프트웨어 공학 기술을 이용하여 문제를 해결하고자 노력하였다(Acock and Reddy 1997; Van Evert and Campbell 1994).객체지향 패러다임의 도입으로 캡슐화를 통한 접근제어, 상속을 통한 코드 재사용성 향상, 다형성을 통한 코드의 동적결합 등을 성취하고, 코드의 유지관리가 가능하다고 판단하였다. 그러나 다수의 서브 시스템이 결합하는 과정에서 여전히 절차적 패러다임을 고수하고 있기 때문에, 시스템 간의 정보 전달을 효과적으로 정의하기 어려우며, 특히 시스템이 확장될수록 시스템 사이의 연결 수가 급격히 증가하여 궁극적으로 시스템 통합이 불가능하였다(이한귀 et al. 2012). 이러한 요소들 간의 연결 복잡성을 해결하기 위하여 시스템을 구성하는 서브모델 사이의 정보전달체계를 단순화한 일방향 정보전달 기법(Unidirectional Information Fetch, UIF)이 제안되었다(Yi 2003). 일방향 정보전달 기법을 이용하여 서브 시스템 사이에 양방향으로 정보를 주고받는 방식에서 탈피하여, 인접한 시스템에 원하는 정보를 가져올 수만 있고, 주입할 수
없도록 설계한 범용 농업 시스템 시뮬레이터(Generic Agricultural Systems Simulator, GASS)가 개발되었다. 편의성을 높이기 위해 컴포넌트 프로그래밍 패러다임을 시각 프로그래밍에 적용하여 사용자가 시스템을 도식적으로 구성하도록 하였다. GASS는 개별 시뮬레이션 모델을 상징하는 사각형 심볼을 화면상에서 인접하게 위치시킴으로써 맞닿은 모델끼리 서로 연결되었음을 정의하였다. 위치 정보를 이용하여 연결 정보를 표현함으로써 시스템을 매우 효과적으로 표현하였다. 그러나, 서로 멀리 떨어진 요소들끼리 연결할 수 없다는 연결성(connection)의 제약, 모델을 맞닿아 연결함으로 인하여 네트워크 구조 혹은 연결선 개념을 표현하기 어렵고, 연결선에 대한 속성을 입력할 수 없는 소통구조(communication)의 제약, 시스템의 외연이 변화하는 현상을 모의할 수 없는 복제기능(cloning)의 제약이 있었다. 본 연구에서는 GASS를 근간으로 하여, 다양한 시스템 시뮬레이션 도구가 갖는 한계를 극복하고, 편의성을 고려하여 농업시스템응용플랫폼(Agricultural Systems Application Platform, ASAP)를 개발하였다. 개발한 시스템 시뮬레이션 플랫폼은 다양한 지역시스템 문제를 적용하여 효용성을 증명하고자 하였다.
1.2 연구 내용 및 범위
본 연구는 시스템 시뮬레이션 도구를 검토하고, 지역시스템 분야에 적용하기에 적합하도록 Yi (2003)가 제안한 GASS를 기반으로 3가지 측면에서 개선한 ASAP를 개발하였다. 개선된 3가지 기능은 연결성(connection), 소통구조(communication), 복제 기능(cloning)으로, 이러한 3C 기능에 대하여 예제를 통해 적합성을 검토하였다. 또한 편의성 향상을 도모하기 위하여 개발된 시뮬레이션 플랫폼의 기능에 대하여 기술하였다. 개발된 ASAP은 분야별로 정리한 지역시스템의 다양한 문제를 적용함으로써 활용 가능성을 평가하였다. 모의하고자 하는 문제는 3C 관점에서 편중되지 않게 분포하도록 선정하였으며, 각 예제는 메커니즘을 설명하는 지배방정식과 이를 컴포넌트로 구현하는 방법,1.3 논문 구성
본 논문은 5개의 장으로 구성되며, 각 장은 다음과 같은 내용으로 구성된다. 제 1장에서는 본 연구의 배경 및 목적에 대해서 기술하였다. 제 2장에서는 시스템 시뮬레이션에 관한 선행 연구를 조사하여 분석하고, 시스템 시뮬레이션에서 필요한 요구사항을 도출하였다. 시스템 시뮬레이션에 있어서 복잡도 증가를 억제하고, 시스템의 자기창발을 모의할 수 있는 도구로 GASS를 소개하였다. 다양한 시스템 시뮬레이션 도구가 소개되었고, 특히 본 연구의 근간이 된 GASS는 많은 장점을 가지고 있지만, 농업시스템을 모의하는 데 있어서 연결(connection), 소통(communication), 복제(cloning) 3C 측면에서 한계가 있었다. 시스템을 구성하는 요소 간의 연결 속도 차이에 따른 기하구조와 위상구조를 동시에 갖는 시스템을 모사하기 위한 연결 측면, 요소 간의 소통구조가 동일하지 않는 이질소통구조를 갖는 시스템의 소통 측면, 경계 및 구조가 변화하는 시스템이 갖는 복제 측면에 대하여 개선 필요성을 기술하였다. 제 3장에서는 앞서 지적한 시스템 시뮬레이션 도구의 한계를 극복하기 위하여 3C 측면에서 새로운 프로토콜을 제시하고, 이를 바탕으로 ASAP를 개발하였다. 개발한 시뮬레이터에 대하여 각 프로토콜 별로 예제를 통하여 검토하였다. 연결성에 대해서는 물리구조적으로 연결된 열전도 해석 문제와 위상구조로 연결된 PERT, 그리고 혼합된 문제로 특정 지점의 온도 조건에 따라 변화하는 제어기가 설치된 열전도 해석 문제를 제시하였다. 소통구조 측면에서는 동질소통구조와 이질소통구조에 대하여 기술하고, 동질소통구조는 절점법을 이용한 트러스의 해석 문제를, 이질소통구조는 모멘트 분배법을 이용한 구조해석 문제를 풀이하였다. 마지막으로 복제 기능 측면에서는 자기 복제를 통해 생장하는 식물을 모의한 프랙탈 기반의 식물생장 모형인 Lindenmayer systems을 구현하였다. 제 4장에서는 개발된 ASAP를 이용하여 다양한 분야에 대하여 적용사례를 제시하였다. 적용사례는 3C 측면을 고려하여 분류하였으며, 지배방정식과 ASAP 컴포넌트를 개발하기 위한 주요 코드를 제시하고, 작성한 컴포넌트를 이용하여 시뮬레이션을수행하고, 기존 연구사례와 비교 고찰하였다. 동질 소통을 하는 위상구조 시스템으로 연결된 저수조의 수위해석과 삼형제 저수지의 수위를 모의하였다. 연결된 저수조의 수위해석은 수리 분야 문제로, 오리피스 공식을 이용하여 수두차에 의한 통수량을 결정하며, 시뮬레이션한 수치해는 미분방정식의 해석해와 비교하였다. 삼형제 저수지는 연결된 저수조 예제의 실제적 예제로, 충북 음성 지역의 연결된 3개의 저수지의 수위변화를 모의하여, 실측한 저수지 수위와 결과를 비교하였다. 동질소통을 하는 물리구조는 일반적으로 유한차분법으로 풀이하는 문제이며, 기존 GASS가 대상으로 한 문제영역이며, 토질, 관개, 재료분야 문제를 선정하여 풀이하였다. 토질분야는 연직배수를 고려한 1차원 토질압밀 모의, 관개분야는 점적 관개에 의한 토양수분 모의, 재료분야는 배수갑문의 염화이온 확산을 모의하였다. 이들 예제를 통하여 유한 차분법으로 정식화된 모형을 손쉽게 시스템 시뮬레이션 환경으로 구현할 수 있음을 서술하였으며, 시간 흐름에 따라 변화하는 형상을 시각적으로 도시하여 연구자가 모의결과를 직관적으로 파악할 수 있도록 하였다. 이질소통을 하는 위상구조로 전염확률을 고려한 감염농가 확산 모델을 모의하였다. 방재분야에 해당하는 문제로, 잠복기를 갖는 현상에서 극치가 지연되어 나타나는 행태를 모의하고, 컴포넌트의 소멸 과정을 통하여 국면이 진정되는 모습을 확인하였다. 이질소통구조를 하는 물리구조로 트러스 구조해석을 수행하였으며, 구조분야에 해당하는 문제를 모의함으로써 기존 해석 기법과의 차이를 비교하고, 컴포넌트 기반의 시스템 시뮬레이션의 특징을 서술하였다. 마지막으로 복제기능을 통해 성장하는 시스템으로 초목의 성장과정을 모의하고, 전처리 기능으로 활용하여 다수의 컴포넌트가 연결된 등가 트러스를 구성하고 해석하였다. 이상에서 살펴본 적용사례를 기반으로, 향후 컴포넌트의 확장을 통하여 시스템 경계의 확장 및 시뮬레이션 결과를 이용한 계획/관리 시나리오 적용에 활용 가능할 것으로 기대한다. 제 5장에서는 3C 측면에서 개선된 ASAP의 특징에 관하여 요약하고, 본 연구에서 제시한 다양한 적용 예제를 종합적으로 정리하였다. 또한 연구의 한계를 검토하고, 향후 활용 방안을
제 2 장 시스템 시뮬레이터
2.1 지역시스템과 시스템 시뮬레이터
지역시스템은 지역 자원과 공간을 인간에게 유용하게 사용하는 데 목적이 있는데, 지역 자원 발굴에 있어서 생산 과정이 오래 걸리고, 생산 과정에서 다양한 요인들이 복합적으로 영향을 미치며, 지역 공간은 인위적으로 변화를 가하기 어렵다. 이러한 환경은 공산품을 대상으로 대량으로 생산체계가 갖추어진 산업공학과는 달리, 인위적으로 환경을 조절하고, 반복실험을 수행하는 직접 실험으로 연구하기 어려우며, 시뮬레이션을 통한 간접 실험으로 연구를 진행해야 한다. 시스템 공학은 시스템을 해석하여, 이해관계자를 만족시킬 수 있는 최적해를 찾는 과정이다(Hazelrigg 1996). 다양한 요소가 서로 영향을 주고 받는 시스템을 해석하기 위한 절차는 Figure 1과 같이 SIMILAR라는 일곱 단계로 정의된다(Bahill and Gissing 1998). 지역시스템공학은 지역시스템을 시스템 공학의 과정으로 풀이하는 것으로 정의할 수 있고, SIMILAR를 간접 실험, 즉 시뮬레이션을 통하여 해석하는 과정으로 치환할 수 있다.시뮬레이션을 이용하여 시스템을 해석하고, 최적해를 찾는 과정을 수행하기 위해서 앞서 제시한 해석 절차를 수행할 수 있는 도구가 필요하다. 시뮬레이션 도구는 현상을 모델링하고, 모델을 결합하고, 시스템의 거동을 모의하고, 모의된 결과를 평가하여, 모델의 속성을 수정할 수 있어야 한다. 이러한 과정을 지원하기 위하여 다양한 시스템 시뮬레이션 도구가 소개되었다.
2.2 다양한 시스템 시뮬레이션 도구
농업 시스템 시뮬레이션 도구는 소프트웨어 공학의 발전으로 통합 가능한 환경을 몇몇 연구에서 제안하고 있다. 그러나 개발자들이 기대하는 바와 달리 지역 시스템 공학 분야에서는 널리 활용되고 있지 못하고 있는 실정이다. 이는 전통적인 모델링 접근방식에 기인한 문제로 객체지향 패러다임을 기술적으로만 적용할 뿐 내부적으로는 절차적 패러다임을 적용하고 있기 때문이다(Yi 2003; 이한귀 et al. 2012). 전통적인 접근 방식은 ‘main’ 모듈에서 필요한 모듈을 모두 추가하고, 매개변수들을 서로 연결하여 상호 정보교환을 하게끔 통합 모델을 개발한다. 이러한 방식은 main 모듈을 작성하는 연구자가 개별 모듈에 대한 이해도가 높아야만 가능한 작업이다. 시스템 시뮬레이터를 개발하기 위하여, 관련 연구를 조사하였다. 일반적으로 시스템 시뮬레이션이라는 용어는 전자기 시스템 시뮬레이션, 행위자 기반의 시스템 시뮬레이션, 시스템 다이내믹스 중 하나를 의미한다. 각 분야 별로 시뮬레이션 도구 및 연구흐름을 조사하고, 시스템 시뮬레이터에 필요한 요건을 도출하였다. 가장 널리 알려진 시스템 시뮬레이션 도구로는 LabView와 Simulink가 있다(손혜영 2012; 임종수 2013). 두 도구는 디지털 신호 처리에 특화된 시스템 시뮬레이터로서, 전통적인 프로그래밍 방식 대신 그래픽 환경을 제공하여 전기회로 설계에 널리 이용되며(Kehtarnavaz and Gope 2006), 실험실에서 전기회로를 설계하듯 가상으로 전기회로를 구축하여 모의실험이 가능한 환경을 제공한다. 강력한 시뮬레이션 기능도 중요하게 작용하지만, 그래픽복잡계 연구에서 파생한 행위자 기반 모델링은 폰 노이만이 개념을 소개한 이래, 콘웨이와 스테판 울프람의 성과를 통하여, 셀룰라 오토마타(Celluar Automata, CA)로 발전한 후, 1980년대를 지나면서 다중 행위자 모델(Multi-agent system, M.A.S.)로 발전하였다. 콘웨이의 생명 게임(Gardner 1970), 울프람의 CA(Wolfram 1983; Wolfram 1984), 행위자 기반 모델링(agent
based modelling, ABM)을 통한 새 무리(bird flock)의
재현(Reynolds 1987) 등이 유명한 사례로 알려져 있다. 일반적인 시스템 시뮬레이션 방법이 시스템의 구조를 정의하고, 시스템의 정해진 구조 내부에서 매개변수가 어떻게 변화하는지를 분석하는 반면, 행위자 기반 시뮬레이션은 시스템을 구성하는 행위자의 거동 규칙만 정의하여, 행위자 집단에서 발현하는 특징을 분석한다는 점에서 차이가 있다. 다중 행위자 모델의 특징은 자율성, 지역적 관점, 탈집중화로 구분하는데, 개념적으로 GASS와 상당 부분 일치한다. 반면, 행위자 기반 시뮬레이션은 주로 행위자들의 조직적 행태에 관심이 갖는데, GASS는 각 컴포넌트의 내부 속성 변화에 관심을 두는 점에서 차이가 있다. 행위자 기반 시뮬레이션 도구로는
Repast, NetLogo, AnyLogic, SeSAm 등의 프로그램이
있다(Collier 2003; Emrich et al. 2007; Klügl et al. 2006; Tisue
and Wilensky 2004). 행위자 기반 시뮬레이션 도구는 시뮬레이션을 수행하는 동안 행위자의 움직임을 실시간으로 확인할 수 있으며, 시스템 전체의 특성은 시뮬레이터에서 모니터링하여, 통계를 제시하거나 그래프로 도시하여 시스템 거동을 설명하는 형태로 이용된다는 특징이 있다. 마지막으로 시스템 다이내믹스는 1950년대 MIT 교수인 제이 포레스터 교수에 의해 창안되었다(Forrester 2007). 순환
구조(feedback loops)와 stock, flow로 설명되며, 시스템의 비선형 메커니즘을 설명하는 데 주로 이용된다. 시스템 다이내믹스는 시스템을 구성하는 인과지도를 작성하여 시스템의 구조를 확정한 후, 모니터링된 입출력 자료를 이용하여, 인과지도의 가중치를 결정하고, 가중치가 입력된 인과지도를 바탕으로 시스템의 비선형 행태를 모의한다. 대표적인 소프트웨어로 Vensim과 STELLA가 있으며(Eberlein and Peterson 1992; Richmond 1994), 시나리오를 모의하고 비교하는 연구에 강점이 있다. 시스템을
구성하는 요소의 조건의 변화에 따라 모의 결과를 저장하여, 각 시나리오별로 비교가능한 정보를 제공함으로써 의사결정자가 시스템을 이해하고, 판단을 내리는 데 도움을 준다.
2.3 GASS
2.3.1 개요
Yi (2003)는 다양한 농업용 시뮬레이션 모델들의 모듈성을 향상시 킴으로써 시스템의 복잡도를 낮추고, 자기 조직 과정을 모의할 수 있는 GASS를 개발하였다. 궁극적으로 다양한 요인이 영향을 주고 받는 복잡계로서, 농업 시스템에 대하여 범용적으로 활용가능한 시 뮬레이션 환경을 제공하고자 하였다. 이를 위해 데이터와 메소드를 분리하고, 컴포넌트 간에 정보 전달을 일방향으로 제한함으로써 모 델 결합으로 발생하는 복잡도를 낮추었다. 또한 컴포넌트를 결합하 여 점진적으로 시스템을 확장하면서 모의할 수 있으며, 단위 시간을 중심으로 동시성(concurrent)을 보장하여, 개별 컴포넌트는 비동기 적으로 기능을 수행하되 전체를 통괄하는 시스템 시간과 동기화함 으로써 전체 시스템의 모의가 가능하도록 설계하였다. 객체지향 패러다임은 시스템을 구성하는 모든 요소를 객체로 정의하고, 각 객체를 캡슐화하여 다른 객체에서 임의로 접근할 수 없도록 제한함으로써 시스템의 복잡도를 낮추고자 하였다. 객체지향 패러다임을 차용하여, GASS는 컴포넌트라는 단위요소로 모델을 정 의한다. 더 나아가 GASS에서는 컴포넌트를 구성하는 데이터와 메 소드를 분리하여, 데이터를 데이터베이스로 관리함으로써 데이터 관 리의 효율을 높이고자 하였다. 컴포넌트를 중심으로 설계된 GASS가 다른 시뮬레이션 환경과 차별화되는 가장 큰 특징은 일방향 정보전달기법이다. 여러 종류의 컴포넌트가 존재할 때, 인접한 컴포넌트를 조사하여, 처리할 수 있 는 형태의 정보를 가지고 있을 때만 해당 정보를 취득하는 방식을 의미한다. 예를 들어, Figure 2와 같이 토양 컴포넌트(SOIL), 작물 컴포넌트(CROP), 대기 컴포넌트(ATMOSPHERE) 3가지 컴포넌트는 water 변수만 소유하므로, water 변수의 값을 읽어서 CROP 컴 포넌트를 계산한다. 반면 SOIL 컴포넌트는 관리하는 변수가 없으므 로, CROP 컴포넌트가 인접해 있음에도 아무런 작업을 수행하지 않 는다.
Figure 2 Concept of unidirectional information fetch scheme (Yi, 2003) 이는 PULL방식으로 명명할 수 있으며, 요청은 자유롭게 할 수 있으나, 그 응답을 보장하지 않는 시스템으로 느슨한 연결성을 보장 한다. 느슨한 연결은 객체지향 패러다임의 주요한 원칙 중 하나로, 높은 응집도와 낮은 결합도를 지원하며(Gamma et al. 1994; McConnell 2004), 개별 요소의 자유도를 향상할 수 있다(Beck and Diehl 2011). 웹 기반 Open API의 근간이 되는 REST(Representational state transfer) 개념 역시 느슨하게 연결 된 분산된 서비스 간의 정보 교환을 가능케 함으로써(Fielding 2000), Web 2.0 시대를 견인하였다(O'reilly 2007). 이러한 독립성을 보장하는 컴포넌트 기반의 환경을 제공함으로 써, 처음부터 시스템을 모두 정의하는 하향식(top-down) 방식이 아닌, 점진적으로 시스템을 확장하면서 개발하는 상향식(bottom-up) 방식으로 모델링이 가능하다. 시스템을 구성하는 개별 컴포넌 트가 전체 시스템을 알지 못한 상태에서 단위 요소로서 주어진 임 무만을 정의한 후, 인접한 컴포넌트를 인지하여 전체 시스템을 모의 함으로써 연구자는 단위 요소의 거동에 집중할 수 있다. 모델을 만 들 때는 전체 시스템과 무관하게 단위 모델만을 개발하면 충분하기 때문에 개발에 필요한 노력이 최소화된다. 모델을 사용할 때는 개발 된 모델의 연결만 정의하면 주어진 도메인에 대하여 모의할 수 있 기 때문에, 기존 시뮬레이션 환경에서 여러 모델을 결합하기 위하여
메인 함수에서 절차와 자료 교환 과정을 정의하는 방식에 비하여 간편하게 이용할 수 있다. 이러한 특징은 관개 시스템 모의, 열전도 모의, 농산물 유통 모의와 같은 다양한 분야의 문제해결에 적용되어 검증되었다(Yi 2003; 김태곤 2007; 서교 et al. 2005). 분석 대상 모델이 되는 단위 컴포넌트는 매 단위시간마다 인접 한 컴포넌트의 값을 이용하여 자신의 컴포넌트 속성을 업데이트하 며, 이 때 인접한 컴포넌트에 인위적으로 값을 주입할 수 없다. 이 는 방어적 프로그래밍 개념으로, 시스템을 구성하는 객체가 서로 레 퍼런스를 공유하면서 값이 의도치 않게 전파되면서 발생하는 부작 용을 방지하는 역할을 수행하여 시스템의 안전도를 향상시킨다 (Bloch 2008; Goodliffe 2007). 방어적 프로그래밍 개념을 기반으 로 각 컴포넌트는 동시에 수행될 수 있었으며(Peierls et al. 2006), 일정 시간마다 동기화를 통하여 각 컴포넌트의 정합성을 유지하였 다.
2.3.2 인접성을 이용한 연결
기존 GASS는 시스템을 구성하는 구성요소간의 연결정보를 컴포넌 트의 위치를 이용한 인접 여부를 기준으로 판단한다. 다음 Figure 3 과 같이 컴포넌트 A, B, C가 존재할 때, 시뮬레이션 환경 GASPanel 위에 각 컴포넌트의 인스턴스를 올려둠으로써 시뮬레이 션을 구동할 수 있다. 이 때 컴포넌트의 인스턴스가 서로 가까이 위 치한다면, 두 인스턴스는 정보를 주고 받을 수 있게 되며, 그렇지 않은 경우에는 정보 교환 없이 독립적으로 컴포넌트의 기능을 수행 한다. 이와 같은 인접성을 이용한 연결정보를 정의함으로써, 사용자 가 시각적으로 관계를 파악하고, 단순히 위치를 이동시키는 작업을 통하여 간단하게 관계를 정의할 수 있다.Figure 3 Schematic view of established simulation model (Yi, 2003)
이와 같이 GASS에서 컴포넌트의 연결을 물리구조적 인접성을 기준으로 설정한 까닭은 시스템을 구성하는 요소가 MPC 모형에 기
반한다고 가정하였기 때문이다. MPC 모형은 Multilayered
Primitive-Composite Models의 약자로, Primitive-Composite 모 형을 개량한 모형이다(배연정 2001). 시설물을 여러 단계로 구분하 기 위한 모형으로, 시설 레이어, 부분 레이어, 요소 레이어, 기본형 레이어로 구분되어, 각 레이어별로 특성을 계층적으로 통합하여 전 체 시설물을 설명할 수 있다. 이러한 실제 시설물을 바탕으로 구성 된 분류법에 따라 시스템을 분해하였기 때문에, 시스템을 구성하는 요소, 즉 컴포넌트의 인스턴스는 실존적 공간을 가진다고 가정하였 다. 따라서, 농업 기반 시설물을 분류하고 모사하는 데에는 적합한 모형이라고 할 수 있다.
2.3.3 속성정보 관리
GASS는 속성정보 관리를 위하여 JAZZ 프레임워크를 이용하였다. JAZZ 프레임워크는 서울대학교 농업구조 및 시스템 연구실에서 개 발된 통합 데이터베이스 프레임워크로, 다양한 벤더의 데이터베이스 시스템을 동일한 환경에서 사용 가능하도록 제공하였다. 그러나 수 년의 시간이 흐르는 동안 벤더의 기능과 프로토콜이 바뀌는 데 반 해 JAZZ 프레임워크는 지속적으로 업데이트를 할 수 없었고, 현재 에 이르러서는 JAZZ 프레임워크를 활용할 수가 없게 되었다. 현재에 이르러 원활하게 사용할 수 없음에도 불구하고, GASS는 데이터베이스를 이용하여 속성정보를 저장할 수 있었으며, 속성 정보는 JazzBean 기반의 컴포넌트 기술을 이용하여 각 클래스의 필드로 저장하고, 해당 필드의 접근자를 통해 정보를 주고 받을 수 있도록 개발되었다. JazzBean 기술은 java에서 제안한 기술로 특정 한 규약을 만족할 경우, JazzBean Editor를 이용하여 손쉽게 데이터 객체를 만들고, 제어할 수 있는 기술이었다(Englander 1997). 컴포넌트 간의 정보 전달은 각 컴포넌트에서 원하는 정보에 해 당하는 키워드를 이용하여 인접한 컴포넌트에 자료를 요청한다. 요 청받은 컴포넌트에 해당 키워드의 변수가 있을 경우, 값을 반환하지 만 그렇지 않은 경우에는 아무런 작업을 수행하지 않음으로써, 다양 한 컴포넌트가 결합된 시스템에서 원활하게 시뮬레이션이 구동될 수 있도록 설계하였다.
2.4 시스템 시뮬레이션 도구의 한계
시스템 시뮬레이션 도구의 기능을 검토하기 위하여 연구대상이 되 는 지역시스템의 관심문제를 정의하고자 하였다. 지역시스템은 자연 현상과 이에 대응하기 위한 인간의 노력을 분석하려는 학문으로, 이 에 해당하는 문제는 이질적인 요소들이 결합되고, 대부분 연속된 공 간 속에서 상호작용을 하지만, 상호작용의 속도가 일정한 단위를 갖 지 않는 형태의 문제로 정의할 수 있다. 대표적인 시스템 시뮬레이션 도구인 LabView와 Simulink는 시 그널 처리, 행렬 계산, 최적화, 그래프와 같은 다양한 유틸리티를 바 탕으로 사용자층이 가장 두터운 응용프로그램이다. 전기회로를 모티 브로 시작된 모형으로 다양한 분야에 응용되고 있으며, 기계장치의 반복적 행태를 모사하는 데 매우 유용하다. 그러나 앞서 정의한 지 역시스템 분야의 문제를 모의하기에는 기술적으로 가능하지만, 효과 적이지 못하다. 범용적으로 사용될 수 있는 반면, 지역시스템 분야 의 문제를 풀이하기 위해서는 간단한 모형도 복잡한 수식과 관계를 통해서 표현되어야 하는 경우가 발견된다. 시스템 다이내믹스 도구는 stock과 flow를 이용하여 시스템을 구성하고, 피드백 구조를 통하여 시스템을 재현하는데, 이는 인공신 경망 모형에서 신경망 구성과 가중치와 유사한 개념이다. 다만 시스서는 기계적으로 무의미한 형상을 구성하여 시스템을 가장 잘 모사 하는 연결구조를 거꾸로 찾아가는 방식으로 모델을 발전시킨다. 이 러한 시뮬레이션 도구는 논리적 관계에 기반을 두고 있기 때문에, 형상을 해석하는 문제에 취약하다. 그리드 자료를 활용한 모형이나 유한요소법, 유한차분법, 유한체적법과 같이 유한공간의 적분을 이 용하는 모델을 재현하는 데 적절하지 않다. 행위자 기반 모델링 중심의 시스템 시뮬레이션 도구는 구성요 소들의 간단한 규칙을 통하여 거시적 동태가 발현할 수 있음을 모 의실험을 통하여 관찰한다. 전염병의 확산과 같이 개개인의 메커니 즘은 단순하게 감염으로 정의하는 반면, 개인별로 잠복기와 감염기 간의 차이가 있고, 개개인의 접촉빈도에 따라 감염확률이 달라지는 문제에 대하여 전체 집단의 감염율을 쉽게 모의할 수 있고, 이를 이 용하여 공동체 공간의 격리시기를 결정할 수 있다. 이러한 예제와 같이 행위자 기반 모델링은 구성요소간의 관계를 정의하지 않고, 무 작위적인 관계에서 새로운 규칙이 발현하는 과정을 관찰한다. 그러 나 지역시스템 분야의 문제는 공학적 지식을 바탕으로 관계가 규명 된 모델이 상당 부분 존재하며, 관리법, 규정과 같이 일정하게 정해 진 모형의 운영규칙을 시뮬레이션 환경에서 반영하고자 하는 요구 가 있다. 행위자 기반 모델링 기반의 시뮬레이션 도구는 이러한 요 구사항에 효율적으로 대응하기 어렵다. 이상에서 살펴본 바와 같이 대표적인 시스템 시뮬레이션 도구 들에 대하여 지역시스템 분야의 적용가능성을 평가하였다. 그러나 사례별로 시스템 시뮬레이션 도구의 장단을 파악하는 데는 한계가 있으므로, 도구의 근간이 되는 메커니즘을 중심으로 도구를 평가할 필요가 있다. 가장 이상적인 모습에 가까운 시스템은 매우 많은 수 의 구성요소가 결합하여, 생명유지라는 공통의 목적을 성공적으로 수행하는 생명체라고 정의할 수 있다. 이러한 생명체를 모의할 수 있는 시뮬레이션 도구라면, 비교적 단순한 지역시스템도 모의가 가 능할 것으로 판단하였다. 생명체는 수많은 세포가 유기적으로 결합하여 생명을 유지하는 대표적인 시스템이기 때문에, 많은 연구가 생물의 내부 메커니즘에 서 영감을 얻고, 이를 모사하려고 노력한다. 콘웨이는 생물의 활동 을 탄생, 생존, 죽음으로 구분하여, 생명 게임(Conway’s game of life)을 소개하며, 셀룰라 오토마타라는 분야를 창안하였으며
(Gardner 1970), 이후 많은 복잡계 연구가 이러한 개념을 기반으 로 발전하였다. 농업 시스템을 모의하기 위한 목적으로 개발한 GASS 또한, 농업 시스템의 근간이라고 판단되는 식물의 생장 메커 니즘을 통하여 모델을 설명하였다. 생명체는 신진대사를 통해 존재목적인 생명을 유지하고, 자기복 제를 통하여 증식하며, 증식 과정에서 형질을 변화하는 기능을 수행 하는 대상으로 정의할 수 있다(루흐알라 2012). 신진대사는 각 세 포에서 발생하는 생화학적 반응으로, 독립적으로 작용하기도 하지만, 주변 세포와 물질교환과 정보교환을 통하여 발현한다. 물질교환은 인접한 세포 간 융합, 삼투 현상 등으로 설명되며, 정보교환은 신경 계에서 신경세포를 통하여 전기 에너지 형태로 정보가 빠르게 전달 되는 현상으로 설명된다.
Table 1 Comparison of GASS components and cells GASS
(GASS components)
Biology (Cells)
Connection Proximity Proximity
Link
Communication Homogeneous Homogeneous
Heterogeneous
Stages Active Active (Survival)
Birth Death GASS는 식물을 모티브로, 잎에서의 광합성 및 뿌리에서의 영 양물질교환작용을 모사하여 독립적으로 수행 가능한 컴포넌트를 설 계하였다. 시스템을 구성하는 개별 요소들이 독립적으로 수행되며, 시스템을 확장하여 다른 요소들과 연결시킴으로써 구성요소 간의 정보교환을 통한 시스템의 자기조직화를 모의하고, 복잡한 시스템의 창발을 확인하였다. 그러나 다수의 요소들이 결합되면서 요소들 간 의 속도가 다른 정보가 존재할 수 있고(Han et al. 2012), 이들 정 보를 효과적으로 표현하기 위해서는 정보전달에 있어 정보계와 물 질계가 분리될 필요가 있다고 지적된 바 있다(김태곤 and 이정재
는 세포와 GASS의 구성요소인 컴포넌트의 특징을 비교하여 Table 1과 같이 정리하였다. 세포는 인접한 세포와 물질교환을 할 뿐만 아니라, 신경세포를 통하여 빠르게 정보를 전달받기도 하는데 반해 GASS에서는 인접한 컴포넌트와의 정보전달만 가능하여 정보전달에 취약한 문제가 있다. 이에 정보계와 물질계를 분리하여, 정보전달을 효과적으로 할 수 있 는 방법으로 전체 시스템에 브로드캐스팅 방식이 제안되었다(김태 곤 and 이정재 2007). 그러나 생명체는 신경세포를 이용하여 신경 계에서 정보계를 관장하는 것에 비해 브로드캐스팅 방식은 수신세 포를 제한할 수 없다는 점에서 한계를 갖는다. 이에 정보계와 물질 계가 분리될 필요가 있지만, 정보계를 구현하는 데 있어서 특성 요 소에만 정보를 전달할 수 있는 위상구조의 도입이 필요하다(한이철 2012). 세포의 신진대사를 살펴보면, 같은 기관이나 조직 내에서 작용 하는 행태와 다른 기관에 속한 조직 간 작용이 다르다. 같은 조직 내에서는 서로가 독립적으로 작용할 수 있는 반면, 다른 조직 간에 는 프로토콜이 맞아야만 작용을 할 수 있다. 이러한 현상은 같은 조 직 내에서 서로 독립적인 위상으로 동일한 형태로 통신할 수 있는 동질소통구조와 어느 그룹에 속한 세포인지를 확인하여 그룹에 따 라 다른 형태로 통신하는 이질소통구조로 정의할 수 있다. 동질소통 구조는 전후 상태와 상관없이 연결되어 있는 함수만으로 설명할 수 있는 구조인 반면, 이질소통구조는 동일 위상에 연결되어 있는 작업 들의 결과에 따라 현재 작업이 달라지므로, 동일 위상에 존재하는 함수, 즉 동일 그룹의 함수에 따라 결과가 달라지는 구조로 설명할 수 있다. 이러한 측면에서 기존 GASS 환경은 동질소통만을 고려하 여, 그룹화된 문제를 해석하는 데 한계가 있다. 마지막으로 시스템의 구성이 변화하는 문제, 즉 시스템이 확장 되거나 축소되는 모형에서는 GASS를 이용하여 모사하기가 어려웠 다. 세포는 자기 복제를 통한 생성, 세포 성장이나 신진대사와 같은 활동작용, 최종적으로 사멸에 이르는 단계를 거치게 된다. 셀룰러 오토마타, 행위자 기반 시뮬레이션 기법은 이러한 세포의 생명주기 를 모티브로 발전하여 복잡계 문제들을 재현하였다(Macal and North 2010; Santé et al. 2010). 그러나 GASS는 시스템의 구조가 고정되어 있는 문제에 한해서만 모의할 수 있다는 한계를 지니고
있다. 이상에서 지적한 바와 같이 시스템 시뮬레이션 도구가 갖는 3 가지 측면의 한계를 인식하고, 이를 개선한 농업시스템응용플랫폼 (ASAP)을 개발하였다. 기존의 GASS의 장점인 일방향 정보전달기 법, 시각 프로그래밍, 속성정보 관리기법 및 독립성이 유지되는 컴 포넌트 기반 모델링 등은 계승하고, 지적된 한계를 개선함으로써 지 역시스템 기반 시뮬레이션 모델의 재현성을 높이고자 하였다.
제 3 장 ASAP의 개발
3.1 발전된 시뮬레이션 프로토콜
3.1.1 연결 프로토콜
GASS는 컴포넌트의 연결성을 설정하기 위하여 물리구조적으로 인접한 컴포넌트를 검색하는 방식으로 구현되었다. 이는 현실 세계에서 물리적 공간을 점유하는 실존적 대상에 대하여 모델링을 수행한다는 개념에서 출발했기 때문이다. 모델링으로 활용되었던 대상을 살펴보면, 관개시스템 모의에서는 논, 수로, 유역, 저수지, 작물(벼), 대기를 대상 컴포넌트로 정의하였으며, 구조시스템에서는 수문과 강, 바다로 정의하였고, 또 다른 구조시스템에서는 물, 사면, 포화토, 불포화토로 정의하였다. 이들 컴포넌트는 연결성이 단순하여, 2차원 공간상에서 인접하게 위치시킬 수 있었기 때문에 효과적으로 시스템 시뮬레이션이 가능했다. 그리고 농산물 유통을 모의하기 위하여 추상적인 모델인 생산자, 도매상인, 소매상인으로 컴포넌트를 구성하더라도(서교 et al. 2005), 복잡하지 않은 관계는 물리구조적 인접성에 기반한 컴포넌트 연결이 가능하였다. 그러나 저수지, 수로, 논으로 구성된 관개시스템에서 다수의 수로 컴포넌트가 연결되고, 양 끝단에 위치하는 저수지 컴포넌트와 논 컴포넌트가 정보를 교환해야 하는 상황에서, 다수의 수로컴포넌트를 지나 정보가 전달됨에 따라 정보전달이 지연되고, 이로 인하여 관개시스템의 모의가 효과적으로 이루어지지 않는 한계를 지적한 바 있다(김태곤 and 이정재 2007). 전달 속도가 다른 정보에 대하여 정보계와 물질계로 분리하여 정보를 다루어야 한다고 제안하면서, 브로딩캐스트 기법에 기반한 해결방안을 제안한 바 있으나, 본 연구에서는 근본적인 대안으로 컴포넌트 간 관계를 위상구조로 연결관계로 정의하였다. 위상구조는 물리구조적으로 인접한 컴포넌트를 전처리에서 계산하여 변환함으로써, 물리구조와 위상구조를 모두 담을 수 있다는 장점이 있다. 이러한 위상구조에서의 관계된 컴포넌트간의 연결은 그래프 이론에 따라 인접행렬로 정의할 수 있다. 공학 문제는 대부분실세계에 실존하는 문제로서 물리구조적 관계에 기반하기 때문에 인접행렬로 관계를 서술할 경우에 희소행렬일 가능성이 높다.
대표적으로 유한요소법에서 전체 강성행렬(global stiffness
matrix)은 대부분 희소행렬이다(Bro-Nielsen 1998; Williams 1973). 따라서 효율적으로 인접행렬을 관리하기 위하여 리스트 구조를 이용하여 컴포넌트 관계를 관리하도록 시뮬레이터를 개선하였다.
네트워크로 정의된 전체 컴포넌트의 관계망에서 각 컴포넌트는 단계별로 연결된 컴포넌트를 찾아야 하므로, 시뮬레이션을 수행하기 전에 너비우선탐색(Breadth First Search, BFS) 알고리즘을 이용하여 각 컴포넌트가 최상위 노드로 설정되는 신장 트리로 변환하였다(Cormen 2009). 이러한 변환과정을 통하여 각 컴포넌트는 모든 컴포넌트와 몇 단계로 연결되어 있는지 알 수 있으며, 일반적으로 직접 연결된 컴포넌트와의 관계, 즉 1단계 연결만으로 시스템의 상호작용을 모의할 수 있다.
3.1.2 소통 프로토콜
시스템 시뮬레이션은 다수의 동일한 컴포넌트가 연결되어, 서로 정보를 주고 받으며 유기적으로 기능을 수행하는 행태를 모의한다. 이 때 정보 통신 방법은 크게 동질소통구조와 이질소통구조로 나눌 수 있다. 동질소통구조는 동일한 컴포넌트끼리 정보를 주고 받을 때 한 가지 경로로만 정보를 주고 받는 행태로서 Figure 4와 같이 도시할 수 있다. 동질소통구조를 갖는 시스템에서는 컴포넌트 간의 연결 유무만 의미가 있으며, 계산을 위한 정보는 컴포넌트가 갖고 있는 속성으로 모의된다. 균일한 시스템을 다루는 문제가 주로 동질소통구조로 구성된다. 반면 이질소통구조는 동일한 컴포넌트 사이에 정보 교환 경로가 여러 가지 형태인 시스템에서 나타나는 구조로, Figure 5와 같이 도시할 수 있다. 동질소통구조와 달리 이질소통구조는 정보 전달 경로가 2가지 이상을 포함하는 시스템 해석 문제로써, 정보를Figure 4 Concept diagram of homogeneous structure for communication
Figure 5 Concept diagram of heterogeneous structure for communication
이질소통구조를 반영하여 정보전달을 구현하기 위하여, 컴포넌트 속성 정보 중 이질소통구조에 해당하는 속성은 연결속성을 결합하여 저장하도록 구현하였다. 컴포넌트 A에서 height와 이질소통구조로 연결된 weight라는 변수가 있을 때, height는 일반변수로 저장하여 관리하였다. 반면 weight 변수는 3번 컴포넌트와 5번 컴포넌트와 연결되어 있다고 가정할 때, (weight, 3), (weight, 5)와 같이 벡터변수로 저장하여 속성을 관리하도록 개발하였다.
3.1.3 복제 프로토콜
시스템이 성장하거나, 쇠퇴하는 시스템 외연이 변화하는 문제를 모의하기 위해서는 시스템을 구성하는 요소의 복제 기능이 필요하다. 요소의 복제는 단순히 동일한 인스턴스를 생성하는 데 그치지 않고, 기존 시스템 요소와의 관계를 정의해야 한다.본 연구에서 복제를 구현하기 위하여, 복제의 권한은 각 컴포넌트가 갖는 반면, 복제를 실제로 수행하는 주체는 전체 시스템을 관장하는 ASAPEnvironment 클래스가 담당하도록 설계하였다. 이러한 설계는 중앙에서 복제를 결정하게 되면, 복제 기능이 한 곳에 집중되어 복잡도가 높아지는 기존 시스템의 문제를 답습하게 되므로, 복제의 권한은 각 컴포넌트가 갖도록 설계하였다. 반면 실제 복제 기능은 시뮬레이션의 중심기능을 수행하는 시뮬레이터의 중심 클래스, ASAPEnvironment 클래스에서 관련 정보를 제어하기 때문에, 각 컴포넌트에서 복제 기능이 요청되면, 이를 정해진 루틴에 의해 수행하도록 개발하였다. 개념적으로 cloning 루틴은 복제를 요청한 인스턴스와 동일한 인스턴스를 생성하고, 인스턴스의 모든 정보를 복사한 후, 요청한 인스턴스에 연결된 인스턴스로 설정하여 시뮬레이션 환경에 반영하는 과정으로 이루어진다. 새로운 인스턴스는 복제된 이후, 처음에는 복제를 명령한 인스턴스와 유일하게 연결되며, 시간이 지남에 따라 시뮬레이션 환경에서 정의한 연결 규칙에 따라 새로운 연결을 확장하는 방식으로 구현하였다. 본 연구에서 작성한 cloning 루틴은 객체지향 프로그래밍 언어인 java에서 제공하는 clone 메소드 구현 원칙을 참조하여 구현하였다. Bloch (2008)는 객체를 복제하는 과정에서 mutable 객체는 주의 깊게 값을 옮겨야 하며, 깊은 복제(deep copy)가 필요하다고 역설하였다. 각 컴포넌트는 자료 저장을 위해서 사전형 자료구조인 Map 클래스와 리스트 자료구조인 List 클래스를 포함하고 있고, 이들 클래스는 mutable 객체를 생성하므로, 얕은 복제(shallow copy)가 일어나지 않도록 개발하였다. 또한 시뮬레이션 결과를 데이터베이스에 저장하기 위한 주 키(primary key)가 되는 컴포넌트의 id가 중복되지 않도록 구현하였다. 이러한 작업은 일정한 규칙에 따라 반복되는 작업이면서, 동시에 규칙을 지키지 않거나, 사용자의 실수에 의해 시스템이 오작동할 수 있는 여지가 있다. 따라서, ASAP 시뮬레이션 환경에서 복제 기능을 제공하여 사용자가 코딩을 하지 않고 이용할 수 있도록 편의성을 제공하고자 하였다. 이러한 cloning 기능을 활용하여 사용자는
3.2 시뮬레이터의 설계
3.2.1 컴포넌트 개발 프로토콜
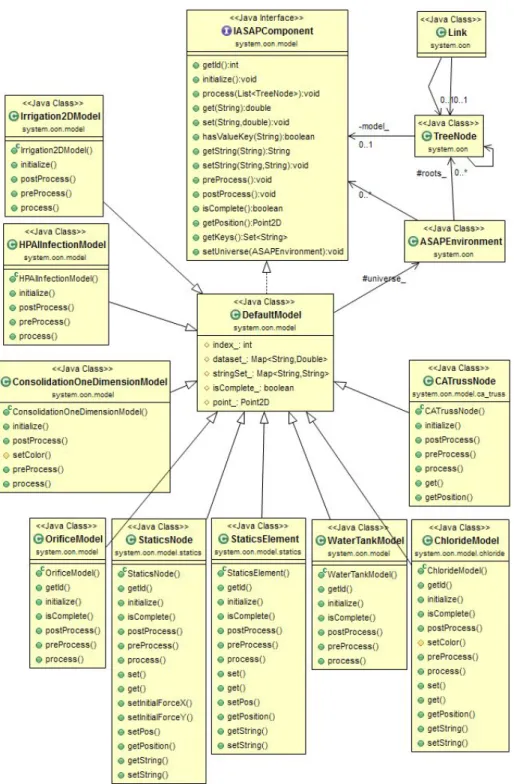
시뮬레이션을 관장하는 ASAPEnvironment 클래스에서는 Figure 6에 도시한 바와 같이, IASAPComponent 인터페이스를 상속한 인스턴스를 소유하고, simulation() 메소드가 호출되면, 단위시간(tick)을 증가시키면서 각 컴포넌트가 preProcess(), process(), postProcess() 메소드를 수행되도록 관장한다. 특히 process() 메소드는 앞서 각 컴포넌트 별로 인접한 컴포넌트를 전달함으로써, 컴포넌트 간에 정보전달이 가능토록 설계하였다.Figure 6 Class diagram of main class and component interface
컴포넌트의 프로토콜 역할을 수행하는 IASAPComponent 인터페이스는 각 컴포넌트의 종료여부를 판단할 수 있는 isComplete 필드를 가지고 있으며, 실수형과 문자형 정보를 저장, 열람할 수 있도록 접근메소드(getter/setter)을 가지고 있다. 연구자는 IASAPComponent를 구현한 DefaultModel라는 추상 클래스를 상속하여 프로그램을 작성함으로써 모델 구현 과정을 간소화할 수 있으며, 주로 process() 메소드만 작성하면 모형을 구현할 수 있도록 설계하였다. 기존 GASS에서는 컴포넌트의 명시적인 규약이 부족하고, java 언어의 리플렉션(reflection) 기능을 활용하여, 바이트코드에서 메타정보를 찾는 방식(introspection)으로 구현되었다. 이러한
방식으로 인하여 설계 상의 복잡함이 존재하고, 개발된 컴포넌트 사이에 일관된 형태를 갖추지 못하였다. ASAP에서는 컴포넌트의 규약을 인터페이스를 이용하여 구현함으로써, 설계를 간결하게 변경하고, 컴포넌트 개발을 위한 코드 작성 시에도 더 적은 코드로 일관된 형태로 작성할 수 있도록 하였다. 이를 통해, 새로운 사용자가 ASAP를 통해 모델을 작성하는 방법을 익히는 데 필요한 노력이 줄여들 것으로 예상된다.
3.2.2 컴포넌트 이용 프로토콜
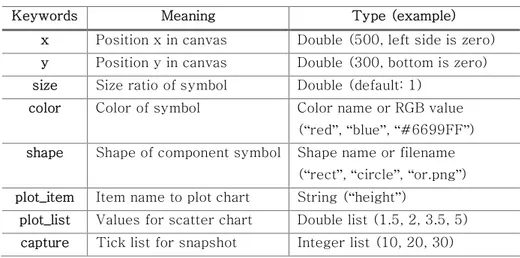
컴포넌트를 이용하는 연구자는 시스템 시뮬레이션을 수행하기 위하여, 다음과 같은 프로시저로 프로그램을 작성해야 한다. 먼저 사용할 컴포넌트의 인스턴스를 생성하고, 각 인스턴스에 속성값을 부여한다. 인스턴스의 속성은 분석 모델 구현 시 필요한 변수들과 GASS에서 특수하게 사용되는 키워드로 구분된다. 시스템에서 제공하는 키워드는 Table 2에 정리하였다. 이들 키워드를 통하여 시뮬레이션 구동 과정에서 컴포넌트를 시각화하기 위한 색상, 크기, 모양, 위치 등을 제어할 수 있다. 특정 컴포넌트의 속성을 관찰해야 할 때에는 “plot” 키워드를 이용하여 그래프로 값을 추적할 수 있다. 또한 시각화된 컴포넌트의 속성은 시간 흐름에 따라 도메인이 변화되는 정성적 정보로 활용될 수 있으므로, 시뮬레이션 구동 이미지를 저장할 수 있는 자동 이미지 저장 기능을 제공한다.Table 2 Reserved words for ASAP
Keywords Meaning Type (example) x Position x in canvas Double (500, left side is zero) y Position y in canvas Double (300, bottom is zero) size Size ratio of symbol Double (default: 1)
color Color of symbol Color name or RGB value (“red”, “blue”, “#6699FF”) shape Shape of component symbol Shape name or filename
(“rect”, “circle”, “or.png”) plot_item Item name to plot chart String (“height”)
개별 컴포넌트 인스턴스에 대한 설정이 끝나면, 컴포넌트를 연결하는 인접리스트를 정의한다. 일반적으로 방향이 없는 시스템의 경우에는 한쪽 방향만 지정하면, 반대방향의 연결도 자동으로 설정된다. 컴포넌트의 연결정보는 시뮬레이션 구동시 화면상에서 확인 가능하므로, 누락된 링크가 없도록 주의가 필요하다. 컴포넌트의 연결성을 정의하면, 기본적으로 시뮬레이션 구동을 위한 설정은 완료된다. 추가적으로 시뮬레이션 구동화면을 저장할 수 있도록 특정 시점을 정의할 수 있고, 시뮬레이션 데이터를 데이터베이스에 저장한 후, csv(comma-separated values) 파일로 추출할 수 있다.
3.2.3 시뮬레이션 유틸리티
본 연구에서는 시스템 시뮬레이터를 개선하면서, 연구에 필요한 다양한 편의기능을 추가하였다. 먼저, 시뮬레이션 결과를 저장하기 위하여 경량 데이터베이스를 도입하였다. 경량 데이터베이스는 데이터베이스 관리시스템 구동을 위하여 별다른 프로그램 설치 없이 기존 프로그램에 접착 프로그램(glue program) 형태로 제공할 수 있다는 점에서 배포의 장점을 갖는다. ASAP으로 시뮬레이션된 결과는 경량 데이터베이스인 SQLite를 통하여 데이터베이스 파일로 저장되며, 시뮬레이션이 종료된 후, csv 파일로 변환하여, 엑셀로 쉽게 원하는 데이터를 참조할 수 있도록 유틸리티를 제공하였다. 두 번째로, 실시간으로 시뮬레이션 결과를 확인할 수 있도록 그래프 기능을 추가하였다. 그래프는 JFreeChart 라이브러리를 이용하여 구현하였으며, “plot_item”으로 지정한 속성에 대하여 시뮬레이션이 수행되는 동안 값을 추적하여 결과를 그래프로 시각화하도록 개발하였다. 그래프 기능은 주요 관심 영역의 속성 값 변화 및 시스템 시뮬레이션을 수행하는 동안 오차의 수렴을 관찰하는 데 이용된다. 세 번째로, 시뮬레이션이 구동되는 동안 시뮬레이션 모델의 구성을 파악할 수 있도록 네트워크 뷰어를 개발하였다. 네트워크뷰어는 컴포넌트의 연결상태를 보여주며, 컴포넌트에서 지정한 색채 및 형태로 표시하게 되는데, 특정 속성값에 따라 색채를 변경하면, 시뮬레이션 진행 상황을 정성적으로 쉽게 확인할 수 있다. 확산 문제와 같은 유한차분 해석방법에서는 후처리 없이 바로 결과를 시각화한다는 점에서 장점이 있다. 이러한 유틸리티는 GASS에서 제공하지 않거나, 제공되더라도 편의성을 향상시킬 필요가 발생하여 개발하였다. 데이터베이스는 기존 GASS에서 jazz 프레임워크를 이용하여, 널리 이용되는 RDBMS(Relational database management system) 중 하나인 MySQL를 사용하였다. 서버 환경에서 데이터베이스를 서비스하는 경우에는 이용하는 데 어려움이 없으나, 로컬 환경에서 데이터베이스를 이용하는 경우에는 따로 MySQL 서버를 구동하고, GASS에서 이용할 수 있도록 설계된 스키마에 따라 데이터베이스를 정의해야 했다. 이러한 환경은 GASS를 원활하게 배포하기 위해서 데이터베이스 서버를 운영해야 제약이 생기게 되었다. 반면, 본 연구에서는 경량 데이터베이스를 이용함으로써, 다소간의 성능저하가 발생하지만 배포에 유리한 설계를 이루어냈다. 자료 저장 과정에서 배치 처리를 통하여 성능을 개선하여, 데이터베이스 교환에 따른 부작용을 최소화하였다. GASS 환경에서는 결과를 확인하기 위하여, 시뮬레이션 구동 후 데이터베이스에 축적된 자료를 쿼리를 통해 추출하여, 엑셀과 같은 프로그램을 이용하여 비교하였다. 반복적으로 결과를 확인해야 하는 상황에서는 매우 번거로운 과정이었기 때문에, ASAP에서는 그래프와 네트워크 뷰어를 통하여 결과를 바로 확인할 수 있도록 제공하였다. 결과를 상세히 분석하기 위해서는 데이터베이스에 저장된 결과값을 추출하여 후처리(post process)하는 과정이 필요하지만, 결과값의 경향이나 분포를 실시간으로 제공함으로써, 사용자가 즉각적으로 모델을 수정할 수 있도록 하였다. 이를 통해, 연구자는 대화형으로 시뮬레이션 모델을 다룰 수 있다. 이러한 환경을 통해 ASAP가 제공하고자 하는 가치는 애자일 선언(Beck et al. 2001)에서 성공적인 소프트웨어 개발을 위해 제시한 가치와 맥을 같이 하고 있다.
3.3 연결성에 대한 검토
3.3.1 물리구조로 연결된 시스템
물리구조로 연결된 시스템은 일정한 공간을 가지고 연속적으로 존 재하기 때문에, 기하학적으로 표현하기에 용이하다. 일반적으로 공 학적 해석을 위하여 모델링을 수행하는 과정에서 현실을 있는 그대 로 모사할 수 없고, 추상화를 통하여 일부 특징을 중심으로 관계를 기술하는데 반해, 물리구조로 연결된 시스템은 상대적으로 덜 추상 화되어, 현실에 존재하는 구체적 형상에 가깝게 사상하여 모델링한 시스템이다. 물리구조로 연결된 시스템은 기존 GASS에서 제시한 방법과 같이, 인접성을 기반으로 요소들의 관계망을 정의할 수 있다. 대표적으로 주어진 경계 내에서의 확산 문제는 잘 알려진 물리 구조로 이루어진 시스템이다. 확산 문제는 평형상태로 도달하려는 자연의 법칙을 수식화한 문제로 일반적으로 식 (1)과 같이 Laplace equation으로 정의하며, 유한차분법(Finite Difference Method, FDM)과 같은 수치해석 방법을 이용하여 해석한다. 2 0 u Ñ = (1) 본 연구에서는 확산 문제 중 하나로 2차원 열전도 문제를 선정 하고, Figure 7과 같이 구성하였다. 주어진 경계조건은 좌측 경계는 100℃이며, 나머지 경계는 0℃로 정의되며, 문제의 해는 내부 온도 가 평형상태에 이르렀을 때의 온도를 의미한다. 이러한 열전도 해석 문제는 컴포넌트가 간격이 일정한 2차원 격자 형태로 연결되어 있 어서 각 컴포넌트가 해당 격자의 값을 대표하여 서로 일 대 일로 대치가 가능한 물리구조를 갖는 시스템이다. 또한 열에너지는 방향성이 없고 높고, 낮은 위상 차에 의해서만 움직이므로 동질소통구조를 갖는 시스템이다. 이 문제는 GASS를 이용하여 모의한 예제로서(김태곤 2007), 물리적으로 연결된 구조 와 동질소통만으로 이루어져 있어 GASS로 풀이가 가능하였다. 주 어진 경계조건에서 내부 11개 지점이 정상상태에 도달하였을 때의 온도를 모의하기 위하여 ASAP를 이용하여 시뮬레이션을 실시하였 다.Figure 7 Problem of 2D heat conduction (Kim, 2007) 제시한 문제를 풀이하기 위하여 열전도 컴포넌트를 구현하고, 컴포넌트를 연결하여 시뮬레이션 환경을 정의하였다. 열전도 컴포넌트는 정상상태를 목표로 작동하므로, 변화율의 변화가 없는 상태로 정의할 수 있으며, 달리 표현하면 각 컴포넌트의 속성값은 주변 컴포넌트가 갖는 속성 값의 평균으로 정의할 수 있다. 이와 같은 규칙으로 작성된 컴포넌트를 서로 연결하여 주어진 문제 도메인과 같은 형태로 시뮬레이션 환경을 구축하여 ASAP를 실행시킨 결과, Figure 8에 도시한 바와 같이 두 가지 결과물을 확인할 수 있다. 왼쪽 창은 주어진 도메인에서 실시간으로 온도에 따라 색이 변하는 행태를 실시간으로 그려주며, 오른쪽 창은 내부 지점 중 2행의 4개 열에 해당하는 지점의 온도변화를 서로 비교 가능하도록 그래프로 결과를 제공한다.
Figure 8 Results of 2D heat conduction problem using ASAP
3.3.2 위상구조로 연결된 시스템
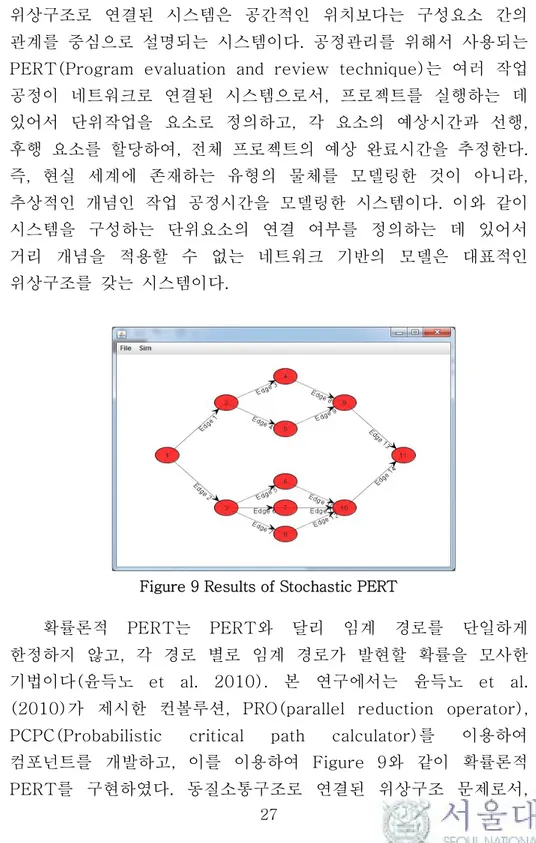
위상구조로 연결된 시스템은 공간적인 위치보다는 구성요소 간의 관계를 중심으로 설명되는 시스템이다. 공정관리를 위해서 사용되는 PERT(Program evaluation and review technique)는 여러 작업 공정이 네트워크로 연결된 시스템으로서, 프로젝트를 실행하는 데 있어서 단위작업을 요소로 정의하고, 각 요소의 예상시간과 선행, 후행 요소를 할당하여, 전체 프로젝트의 예상 완료시간을 추정한다. 즉, 현실 세계에 존재하는 유형의 물체를 모델링한 것이 아니라, 추상적인 개념인 작업 공정시간을 모델링한 시스템이다. 이와 같이 시스템을 구성하는 단위요소의 연결 여부를 정의하는 데 있어서 거리 개념을 적용할 수 없는 네트워크 기반의 모델은 대표적인 위상구조를 갖는 시스템이다.
Figure 9 Results of Stochastic PERT
확률론적 PERT는 PERT와 달리 임계 경로를 단일하게 한정하지 않고, 각 경로 별로 임계 경로가 발현할 확률을 모사한 기법이다(윤득노 et al. 2010). 본 연구에서는 윤득노 et al. (2010)가 제시한 컨볼루션, PRO(parallel reduction operator), PCPC(Probabilistic critical path calculator)를 이용하여 컴포넌트를 개발하고, 이를 이용하여 Figure 9와 같이 확률론적 PERT를 구현하였다. 동질소통구조로 연결된 위상구조 문제로서,
개발된 컴포넌트를 이용하여 손쉽게 구현할 수 있었으며, 모의 결과는 발표된 연구결과와 동일한 결과를 확인하였다.