연차평가 보고서
과제유형 1. 기관고유임무형 ( O ) 2. 산업계연계형 ( ) 3. 창의연구형 ( ) 대과제명 지능형 상황인지 및 IOT 기반 기술개발 세부과제명 차량 내 무선 센서네트워크 기반기술 및 지능형자동차 적용기술 개발 세부과제 책임자 소속 및 부서 산업IT융합연구단 자동차인터랙션연구실 직위 (직급) 연구원(책임) 성명 김 도 현 총연구기간 2013 년 1 월 1 일 부터 2015 년 12 월 31 일 까지 ( 36 개월) 당해연도 연구기간 2014 년 1 월 1 일 부터 2014 년 12 월 31 일 까지 ( 12개월 ) ( 2차년도 ) 총 연 구 비 정부출연금 5,542,000 천원 당 해 년 연 구 비 정부출연금 1,771,000 천원 민간부담금 540,000 천원 민간부담금 180,000 천원 계 6,082,000 천원 계 1,951,000 천원 참여인력(M/Y) 총 연 구 기 간 91 명 ( 35.30 M/Y) 당해연도 연구기간 29 명 ( 11.13 M/Y) 참여기관 기관명 연구책임자 기관명 연구책임자 참여연구기관 자동차부품연구원 박지훈 ㈜유라코퍼레이션 이정훈 ㈜대창모터스 권재욱 ㈜씨티아이에스 서연곤 위탁연구기관 세명대학교 김식 키워드 (6~10개)In-Vehicle, In-Car, Intra-Vehicle, Intra-Car, Wireless Sensor Networks, MAC, Sensor Node, Basestation, Wireless Automative Sensor Networks
정부출연금사업 연차평가 보고서를 제출합니다. 2014 년 11 월 28 일 세부과제책임자 : 김 도 현 (인) 직 할 부 서 장 : 박 종 현 (인)
한국전자통신연구원장 귀하
Ⅰ
. 해당 연도 추진 현황
Ⅰ-1 기술개발 추진 일정 당초계획 개발내용 일련 번호 개발 내용 추진 일정(12개월) 달성도 (%) 1 2 3 4 5 6 7 8 9 10 11 12 1 요구사항분석 100 % 2 설계 100 % 3 구현 100 % 4 시스템 통합 100 % 5 통합 시험 100 %Ⅰ-2 해당 연도 추진 실적 1. 당해연도 개발 목표 및 개발 내용 ① 개발목표 전년도에 수행되었던 차량 내 무선통신 환경 분석, 우선적용 대상 도출, 시스 템 설계 등을 기반으로 신뢰성 있는 차량 탑재형 무선 센서네트워크 시스템 (무선 센서네트워킹, 무선 센서노드, 베이스스테이션) 개발 및 통합 시험 ② 개발내용 및 범위 o 차량 내 잡음과 상호 간섭에 강한 신뢰성 있는 차량 내 무선 센서네트워킹 기술 개발 - 차량 내/외 간섭, 잡음 및 장애물 회피를 위한 MAC 프로토콜 S/W 개발 - 고신뢰성 지원 네트워킹 S/W 개발 - 차량 내 무선 센서네트워크 사용 주파수 대역 분석 - 차량 내 무선 센서네트워크 적용 대상 센서 분석 - 고정 및 이동 차량 탑재 MAC/네트워킹 시험 및 검증 기술 개발 - 차량 내 유선 네트워크 및 무선 센서네트워크 연동 인터페이스 기술 개발 - 차량 무선 센서네트워크 전송 보안 적용 기술 설계 o 차량 내 임의설치가 가능하고, 저전력 처리가 가능한 차량 내 무선 센서노드 개발 - 우선순위/이벤트/샘플링주기기반 차량 내 무선 센서노드 데이터 처리 기술 개발 - 저전력 프로세싱 및 우선순위 등 데이터 처리 모듈이 탑재된 무선 센서 노드 S/W 개발 - 차량 운행 환경에서 내구성을 보장하는 소형, 저전력 무선 센서노드 H/W 개발 및 제작 - 차량 내에 설치 및 유지보수 편의성을 제공하는 무선 센서노드 하우징 개발 및 제작 - S/W, H/W, 하우징이 통합된 차량 내 무선 센서노드 개발 및 제작 o 차량 내 무선 센서노드 연동을 위한 실시간 센서 스트링 처리 지원차량 내 베이스스테이션 개발 - 우선순위/이벤트/센서신호샘플링주기 기반 다중 무선 센서노드 처리 기술 개발 - 베이스스테이션 시스템 구동 소프트웨어 및 드라이버 고도화 - 단일 무선 센서노드 지원용 베이스스테이션 S/W 개발 - 차량 운행 환경에서 내구성을 보장하는 베이스스테이션 H/W 개발 및 제작
- 차량 내에 설치 및 유지보수 편의성을 제공하는 베이스스테이션 하우징 개발 및 제작 - S/W, H/W, 하우징이 통합된 단일 무선센서노드 지원 및 차량 내 유선 네트워크 독립형 베이스스테이션 개발 및 제작 o 차량 내 무선 센서네트워크 적용 지능형자동차 적용시스템 설계 및 개발 - 실용화를 위한 경제성 분석 등을 통한 상용화 방안 도출 - 차량 내 센서노드, 베이스스테이션 탑재기술 개발 - 차량 내 무선 센서네트워크 적용 운전자 편의시스템 설계 및 개발 2. 성과지표 선정 및 목표설정 성과목표 목표도출 근거 성과지표 당해연도 목표 (‘14년도) 평가(검증)방법 배점 output 차량 내 무선 센 서 네 트 워 크 핵심기술개발 국내 구현 사례가 없어, GM 등 국외기업의 선 행연구 참고 무선통신 에러율 5% 현장시험 (시뮬레이션 포함) 20 무선채널 호핑시간 250 msec 현장시험 (시뮬레이션 포함) 20 센싱데이터 처리시간 100 msec 현장시험 (시뮬레이션 포함) 20 소계 60점 outcome/impact 논문/특허를 통한 기술성 제고 기술이전/시제품을 통한 연 구 결과물의 완성도 제고 SCI/국제논문/국내논문 1 / 3 / 3 논문게재 증빙자료 8 표준기고서(국내) 2 증빙자료 8 국제/국내특허출원 3 / 5 특허출원 증빙자료 8 기술이전/기술료 (단위: 건, 억원) 2 건 / 1.0 억원 기술이전 계약 8 시제품 (단위: 건) 3 건 H/W, S/W 8 소계 40점 합계 100점
3. 당해연도 연구개발 추진내역 o 차량 내 잡음과 상호 간섭에 강한 신뢰성 있는 차량 내 무선 센서네트워킹 기술 개발 - 차량 내/외 간섭, 잡음 및 장애물 회피를 위한 MAC 프로토콜 S/W 개발 - 고신뢰성 지원 네트워킹 S/W 개발 - 차량 내 무선 센서네트워크 사용 주파수 대역 분석 - 차량 내 무선 센서네트워크 적용 대상 센서 분석 - 고정 및 이동 차량 탑재 MAC/네트워킹 시험 및 검증 기술 개발 - 차량 내 유선 네트워크 및 무선 센서네트워크 연동 인터페이스 기술 개발 - 차량 무선 센서네트워크 전송 보안 적용 기술 설계 ▪ 차량 내/외 간섭, 잡음 및 장애물 회피를 위한 MAC 프로토콜 S/W 개발 * 차량 내/외의 무선 통신의 경우, Non-LOS(Line-of-sight) 환경이 대부분이며, 무선 통신 환경이 열악할 뿐만 아니라, 통신 환경이 동적으로 변화하므로 신뢰성 있는 무선 통신을 위한 경량 채널 코딩 기법이 필수적임 * 당해년도에는 센서노드 플랫폼 (저전력, 저사양 Microcontroller) 에서 동작 가능한 경량 채널 코딩 기법을 설계 및 구현함 * Reed-Solomon(RS) Code를 이용한 경량 채널 코딩 기법 설계 . 기존 고성능의 FEC(Forward Error Correction) 기법(e.g.,
LDPC, Viterbi-decoder)의 경우 고성능의 microcontroller와 많은 메모리가 필요함 . RS-code는 기존 디지털 위성방송 시스템(DVB-T) 및 CD/DVD 에서도 근접 오류 보정 기능의 우수성으로 인해 널리 사용되고 있음 . RS-code는 대표적인 블록 코딩 기법으로, 블록의 크기에 따라 연산량 및 메모리의 사용량이 크게 변하지만, 블록의 크기를 고정할 경우 상대적으로 저사양 및 메모리가 제한적인 프로세서에서도 구현이 가능함 . RS-code 구조 1) RS-code는 k 심볼의 데이터에 대해 코드워드가 n 심볼일 때, n-k 심볼의 PARITY를 생성함. 특히, RS-code는 코드워드에 데이터가 변형없이 그대로 적용되므로 , CRC check 결과 CRC 오류가 없는 데이터에 대해서는
decoding 과정을 생략하고 데이터를 수신할 수 있음 2) RS code는 수학적 연산을 기반으로 한 블록 코딩 기법으로 코드워드 전체 (PARITY 포함)에서 최대 (n-k)/2 심볼에 발생한 오류를 정정할 수 있음 그림 1. RS 코드의 Encoding 구조 * RS-code 설계 및 구현 . Parameter 설정 및 초기화 1) 블록 코드 기법의 경우 트랜스미터/리시버 간에 블록의 크기를 미리 알고 있어야 함. (연산량 감소) 2) 저사양 MCU에서의 동작을 위해 encoding/decoding에 필요한 수학 구조를 고정시키고, 초기에 필요한 수학 연산을 미리 수행하기 위함 - RS_MM: RS code는 앞서 설명한 바와 같이 Galois Field (GF)를 사용하는 수학 기법임. 디지털 통신에서 GF는 2m과 같이 m-binary bits의 field를 사용하며, 본 설계에서 RS_MM은 GF의 m-bit, 즉, 8-bit 프로세싱을 사용함 - DATA_LEN: 앞서 언급한 바와 같이 블록 코딩 기반 의 RS-code는 연산량 및 메모리 사용의 효율을 위해 encoder와 decoder 간에 사용할 데이터 블록의 크기를 미리 알고 있어야 함. 본 시스템에서는 CAN 통신 규격 에서 사용하는 최대 데이터 크기를 사용함 - PARITY_LEN: 연산의 효율성을 위해 PARITY_LEN 역시 고정하여 사용해야 함. PARITY_LEN은 결국 통신 과정에서 발생할 수 있는 오류에 대한 최대 정정 성 능과 직접적인 관계가 있음 (비례). 하지만, PARITY의 길 이 크기는 결국 코드워드의 길이를 늘이므로, 사용할 채널
의 특징을 고려하여 적절한 길이를 선택해서 사용해야 함 그림 2. RS code 초기 파라미터 설정 3) 초기화 함수는 선택된 파라미터에 대해 GF를 구성하고 encoding 및 decoding에 필요한 초기 메모리 공간을 확보하고 필요한 다항식 구성 및 연산을 위한 초기 과정을 수행함 . Encoding 1) 입력 데이터에 대해 PARITY를 연산하고, 최종적으로 송신할 코드워드를 연산함 2) 내부 메모리 공간을 효율적으로 사용하기 위해, 미리 코드 워드를 위한 공간을 확보한 후, 데이터 입력에 따라 PARITY 생성 및 코드워드를 구성하여 전송함 그림 3. Encoding 및 송신 구조 . Decoding
1) RS code는 encoding보다 decoding에 연산량 및 메모리 사 용량이 많은 구조이므로, CRC 오류가 없을 경우 decoding 연산을 수행하지 않고 수신한 코드워드에서 DATA_LEN 길 이를 읽어 들이면 정상적인 데이터 수신이 가능함
2) Decoding은 기본적으로 반복된 수학 연산을 통해 각 심볼에 대해 오류 발생 여부를 확인하고 오류가 발생하였을 경우, 이를 정정하는 과정을 진행함 3) Decoding 함수에서는 입력 코드워드에 대해 오류가 정정된 데이터를 출력하며, 발생 및 정정된 오류의 수를 리턴함 그림 4. Decoding 및 수신 구조 * 센서노드 플랫폼에서의 RS code 시험 결과 . 시험 환경: 센서노드에서 작성된 40 bytes의 데이터에 대해 encoding/decoding 기능시험 및 임의로 추가된 오류에 대한 decoding 정정 시험 확인함 그림 5. 시험 환경 구성도 . RS-code 기능: 정상적으로 수학 연산 및 PARITY 생성 과정 과 PARITY를 이용한 에러 정정 코드 연산 정상 수행 확인함
그림 6. Encoding 기능 시험: PARITY 연산 확인
그림 7. Decoding 기능 시험: 정상 데이터 확인
. RS-code 성능: Parity는 20 bytes이므로 최대 10 bytes (i.e. 80-bit)의 오류까지 정정할 수 있음. 본 실험에서는 서로 다른 지점의 3 bytes 오류에 대한 정정 기능을 확인함
그림 8. Decoding 기능 시험: 심볼 오류에 대한 정정 확인 * 센서노드 플랫폼에서의 FEC 성능 시험 결과 . 시험 환경: 센서노드 사이의 열악한 무선 채널 환경을 꾸미기 위해, 송신 노드와 수신 노드 사이에 Physical Attenuator를 두고 안테나를 서로 cable을 이용해 물리적으로 채널을 강제 설정한 후, attenuator를 조절하며 FEC를 적용하지 않았을 때 와 적용했을 때의 packet reception rate(PRR)를 측정함
그림 9. FEC 성능 확인을 위한 시험 환경 구성
. Atten. 65 dBm: FEC를 적용하지 않았을 때, PRR이 평균 90 % 에 미치지 못하는 반면, FEC를 적용한 후 PRR이 95 % 이상으로 향상됨을 확인할 수 있음
그림 10. FEC 적용 전/후 PRR 변화 – 90 %이하에서 95 %이상 . Atten. 70 dBm: FEC를 적용하지 않았을 때, PRR이 평균 60 %에 미치지 못하는 반면, FEC를 적용한 후 PRR이 90 % 이상으로 향 상됨을 확인할 수 있음 그림 11. FEC 적용 전/후 PRR 비교 – 60 %이하에서 90 %이상 ▪ 고신뢰성 지원 네트워킹 S/W 개발 * 시스템 설계 구조의 목표와 제약 . “고 신뢰성 지원 네트워킹 S/W”의 설계 목표는 기존의 유선 자동차 네트워크를 보완하기 위하여 무선 네트워크 시스템을 개발함에 있어서 차량 내 Non-LOS 환경에서 신뢰성 있는 무선 통신 데이터 전송을 위해, 차량 내 네트워크 시스템을 특정하고 네트워크를 구동하기 위한 PHY, MAC 그리고 APP 구조와 동 작 방법을 제시하는 것임. 이와 같은 신뢰성 있는 차량 내 네트 워킹 S/W를 개발하기 위해서는 보드 설정 제어부, CAN 통신 제어부, RF 제어부 Serial 통신 제어부 등이 필요함
* 고 신뢰성 지원 네트워킹 S/W 논리 구조 . 고 신뢰성 지원 네트워킹 S/W의 전체 논리 구조는 아래 그림과 같음 그림 12. 고신뢰성 지원 네트워킹 S/W 논리구조 * 보드 설정 제어부 그림 13. 초기화 과정 . 보드의 초기화 기능을 수행 하고 설정 값에 의한 BASE/NODE 보드 초기화 기능과 함께 시리얼 통신 제어 모드를 결정함( CAN 통신/ UART 통신) * CAN 통신 제어부 . CAN 제어부에서는 CAN 데이터의 송수신을 관리를 하고 RF로 수신 받은 데이터를 CAN으로 송신을 하고, CAN으로 수신된 데이터를 RF 제어부로 전달하는 기능을 가짐 . 주요 기능에는 CAN 트랜시버 관리기능, CAN 환경 설정 및 관
리 기능, CAN ID 에 대한 하드웨어 및 소프트웨어 필터링 기능, CAN ID 별 하드웨어 버퍼링 기능, CAN 메시지 송수신 기능 그 리고 CAN BUS 감지( CAN 11bit, 29Bit ) 기능을 지원함
그림 14. CAN 통신 S/W 구조 * RF 제어부 . RF 제어부는 Base 동작 모드와 Node 동작 모드로 나뉨. RF 제어부는 SPI, GPIO를 통해 RF 트랜시버를 제어하고, R F 트랜시버제어는 CC2500 드라이버는 SPI Driver의 레지스터 Access 기능을 통해 제어함 . 주요 기능에는 우선순위에 따른 RF 송수신 기능, RF 메시지 버 퍼링 기능 그리고 NODE Address관리 기능이 있음 . CAN에서 RF로 전달되는 데이터 메시지 구성의 예는 아래 표와 같음
CAN ID Size CAN Data CAN Type C A N Filter 시퀀스 넘버 RF Address 메시지 Valid Node Valid 0x781 8 0x01 0x02 0x03 0x04 0x05 0x06 0x07 0x08 0x0A 0x0FFF 1 0x0123 0x01 0x01 0x780 4 0xFF 0x00 0x03 0x04 0x0A 0x0FFF 1 0x000 0x01 0x00 0x1200 0012 1 0x02 0x0B 0x1FFF FFFF 1 0x0123 0x00 0x01 0x1200 0013 8 0x01 0x02 0x03 0x04 0x05 0x06 0x07 0x08 0x0B 0x1FFF FFFF 1 0x0121 0x01 0x01 표 1. CAN to RF 전송 데이터 구성 . CAN에서 RF 데이터 전송을 위한 제어 흐름도는 아래 그림과 같음 그림 15. CAN to RF 데이터 전송 제어 흐름도 * 시리얼 통신 제어부 . 시리얼 제어부는 시리얼 통신을 관리 하고 RF에서 온 데이터를 시리얼 전송하는 기능을 가짐. 시리얼에서 수신된 데이터를 RF 제어부로 전달하는 기능도 있음 * 사용 함수 설명 . 보드 초기화 함수
Function
names Descriptions Caller
SystemInit MCU의 Clock 및 주변장치 Clock설정, 인터럽터 백터 설정 및 MCU Core와 관련 된 초기화 기능을 수행한다. void SystemInit(void)
delay_init Delay 초기화한다. void delay_init(void)
CAN_Configuration CAN 초기화한다. void CAN_Configuration(void)
USART_Configuration USART 초기화한다 void USART_Configuration(void)
GPIO_Configuration GPIO를 초기화한다. void GPIO_Configuration(void)
표 2. 보드 초기화 함수
. CAN 함수
Function names Descriptions Caller
CanWriteData CAN Data를 송신한다. void CanWriteData(uint16_t ID)
CAN_Receive CAN Data를 수신한다. void CAN_Receive(CAN_TypeDef* CANx
,uint8_t FIFONumber, CanRxMsg* RxMessage)
USB_LP_CAN1_
RX0_IRQHandler CAN RX Interrupt Vector void USB_LP_CAN1_RX0_IRQHandler(void) CAN_StructInit CAN_InitStruct 구조체를 초기화시킨다. void CAN_StructInit(CAN_InitTypeDef* CAN_InitStruct) CAN_Transmit CAN_TypeDef구조체에 따 른 CAN 메시지를 송신한다. uint8_t CAN_Transmit(CAN_TypeDef*
CANx, CanTxMsg* TxMessage)
CAN_Init CAN HW를 파라미터 값으
로 초기화시킨다.
uint8_t CAN_Init(CAN_TypeDef* CANx, CAN_InitTypeDef* CAN_InitStruct)
CAN_DeInit
요청 받은 CAN Controller 를 Deinitializes한다. 레지 스터는 Reset 상태를 가진다.
void CAN_DeInit(CAN_TypeDef* CANx)
CAN_CancelTransmit 송신 되는 않는 CAN센서노드 를 Mailbox값에 의해 취소한다.
void CAN_CancelTransmit(CAN_TypeDef* CANx, uint8_t Mailbox)
CAN_Receive CAN 인터럽트 수신 시 데이터
를 수신하는 기능을 수행한다.
void CAN_Receive(CAN_TypeDef* CANx
,uint8_t FIFONumber, CanRxMsg*
RxMessage )
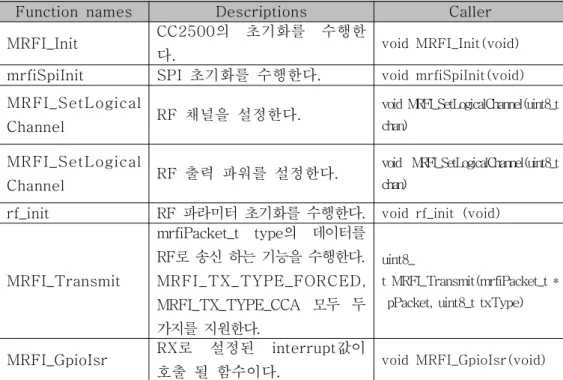
. RF 함수
Function names Descriptions Caller
MRFI_Init CC2500의 초기화를 수행한
다. void MRFI_Init(void)
mrfiSpiInit SPI 초기화를 수행한다. void mrfiSpiInit(void)
MRFI_SetLogical Channel RF 채널을 설정한다. void MRFI_SetLogicalChannel(uint8_t chan) MRFI_SetLogical Channel RF 출력 파워를 설정한다. void MRFI_SetLogicalChannel(uint8_t chan)
rf_init RF 파라미터 초기화를 수행한다. void rf_init (void)
MRFI_Transmit mrfiPacket_t type의 데이터를 RF로 송신 하는 기능을 수행한다. MRFI_TX_TYPE_FORCED, MRFI_TX_TYPE_CCA 모두 두 가지를 지원한다. uint8_ t MRFI_Transmit(mrfiPacket_t * pPacket, uint8_t txType)
MRFI_GpioIsr RX로 설정된 interrupt값이
호출 될 함수이다. void MRFI_GpioIsr(void)
표 4. RF 함수
. 관리 관련 함수
Function names Descriptions Caller
wcb_init WCB관리 기능 void wcb_init(void)
rf_tx_proc CAN으로 부터 수신된 데이터를 RF로 송신하는 기능을 가진다. void rf_tx_proc(void) rf_rx_proc RF로 부터 수신된 데이터를 CAN 으로 전송하는 기능을 수행한다. void rf_rx_proc(void) rf_send_frame 입력된 데이터를 RF데이터 수신 프레임을 생성 하는 기능을 가진다. void rf_send_frame(uint8_t cnt, uint8_t seq) 표 5. 관리 관련 함수 * 에러 성능 시험 구성과 방법 . TI 사의 SMART RF를 이용하여 무선 노드를 단반향으로 데이터를 송신 하고 무선 구간에 데이터 에러율을 표시함
그림 16. 시험 구성도 * 시험 결과 그림 17. 시험 결과 송신 주기 송신 수 Not OK Sequence Error Packet Error Bit Error 1 200msec 76474개 1307 NA 1.7% 0.01% 2 200msec 278,292 개 2426 NA 0.9% 0.00% 표 6. 시험 결과
▪ 차량 내 무선 센서네트워크 사용 주파수 대역 분석 * 기존 IEEE802.15.4 기반 차량 내 무선환경 및 링크특성과 비교하여 사용가능한 주파수 대역에 대한 분석을 위해 아래 그림과 같은 900 MHz 대역의 노드를 사용하여 차량 내 무선 센서네트워크 링크환경 분석 시험을 수행함 * 시험 구성 요소 . 900 MHz 센서노드 1) ATmegaRF212 칩을 내장한 센서보드, -25 ~ 0 dBm 출력 2) 20, 40, 100 및 250 kbps data rate 그림 18. 900 MHz 시험용 보드 (ATmegaRF212) . 1차년도에는 2.4 GHz 대역의 Tmote SKY 노드를 이용하였음 그림 19. 2.4 GHz 시험용 보드
Transmitter location Index Description T1 차량 엔진룸 전면 운전석 방향 하단 T2 차량 엔진룸 전면 조수석 방향 하단 T3 차량 엔진룸 라디에이터 팬 T4 트렁크 후면 운전석 방향 T5 트렁크 후면 조수석 방향 T6 트렁크 GAS통 중앙 하단 T7 차량 실내 뒷문 조수석 방향 * 시험 설정 . 전송출력은 –25, -15, -10, -5, dBm으로 설정함 . Data rate는 250 kbps로 설정함 . 시험차량 : 2003년형 기아자동차 Regal LX (LPG 차량) * 시험 방법 . 아래 그림과 같이 1차년도 링크 특성 시험과 같은 차량에 동일한 시험 위치에 설치하여 시험함 . 1차년도 시험과 다르게 트랜스미터가 3곳의 각기 다른 위치에서 송출하고, 실내 대쉬보드에서 수신하도록 구성됨 . 엔진룸 1곳, 실내 1곳, 트렁크 1곳(LPG 통 1곳) 총 3곳에서 송신 및 차량 내 대쉬보드에 위치한 노드에서 수신함 . 각 노드 당 1,000개의 패킷(33 bytes)을 6개의 출력으로 전송 후 수신노드의 UART를 통해 패킷정보를 수집하도록 함 그림 20. 차량 내 다양한 주파수 대역별 무선환경 측정 시험 모식도
- 총 1,000개 패킷을 100ms 간격으로 전송(100초)
. 송신노드 패킷 구성
그림 21. 차량 내 무선링크 측정 시험에 사용한 송신노드 패킷 포맷
- 송신패킷에 sequence number를 삽입하여 error 발생 위치를 알 수 있도록 구성함
* 측정 및 분석항목 . 측정항목
- LQI, RSSI, Sequence number, CRC에 대해 1,000개의 packets를 3회 반복하여 측정함
. 분석항목
- PRR(Packet Reception Rate), PER(Packet Error Rate), Goodput, CL(Channel Loss)
* 시험결과 및 분석
Index A G CE PRR PER Goodput D -5 1000 988 - 0.988 0.012 0.988 -10 1000 940 - 0.940 0.060 0.940 -15 1000 999 - 0.999 0.001 0.999 -25 1000 219 - 0.219 0.781 0.219 C -5 1000 1000 - 1.000 0.000 1.000 -10 1000 997 - 0.997 0.003 0.997 -15 1000 628 - 0.628 0.372 0.628 -25 1000 557 - 0.557 0.443 0.557 P -5 1000 751 - 0.751 0.249 0.751 -10 1000 998 - 0.998 0.002 0.998 -15 1000 940 - 0.940 0.060 0.940 -25 1000 177 - 0.177 0.823 0.177 표 8. 에러 지표와 관련있는 시험 측정 항목 - 전송출력이 –25 dBm일 경우 Goodput이 낮았지만, -15 dBm 이상에서는 0.9 이상의 높은 값을 보임 . 송신출력 및 차량 내 위치에 따른 RSSI 및 LQI는 아래 표 및 그림과 같음
Index
RSSI [dBm] LQI CL [dB]
Min. Avg. Max. Std. Min. Avg. Max. Std. Min. Avg. Max. Std.
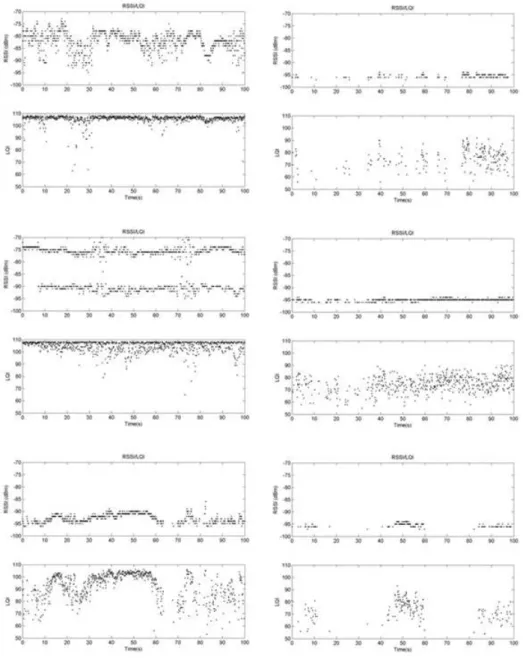
-5 C -95 -77.2 -69 8.9 65 104.8 108 4.3 62 80.4 88 9.6 D -95 -80.7 -73 4.0 63 105.5 108 3.8 66 77.1 88 4.2 P -96 -92.3 -86 1.7 53 92.7 106 10.5 69 75.9 79 1.7 -10 C -96 -75.9 -71 8.1 61 103.3 108 8.9 59 75.0 84 11.1 D -96 -84.9 -78 4.2 63 102.6 108 7.0 66 76.3 84 4.2 P -96 -91.1 -76 7.0 61 102.5 108 8.3 59 71.5 79 7.6 -15 C -96 -92.9 -88 1.4 54 88.8 106 10.5 71 76.4 79 1.4 D -95 -87.3 -82 2.2 71 104.6 108 3.4 65 71.4 78 2.2 P -95 -91.8 -88 1.4 62 94.4 107 8.7 71 75.2 78 1.4 -25 C -96 -95.0 -94 0.4 48 74.7 90 6.5 67 68.0 69 0.4 D -97 -95.4 -94 0.6 56 75.4 92 7.7 67 68.5 70 0.6 P -97 -95.3 -94 0.7 54 73.7 93 7.8 67 68.4 70 0.7 표 9. RSSI, LQI 및 CL의 통계치 데이터
그림 22. 시간에 따른 RSSI와 LQI 변화, 전송출력 : - 5 dBm(좌측), -25 dBm(우측) . RSSI 비교 - 아래 그림과 같이 –10 dBm을 기준으로 하여 –15 dBm의 전송출력이 되는 순간, 대부분의 위치에서 RSSI가 급감함. 즉 전송출력이 –25 dBm일 경우 Goodput이 낮았지만, -15 dBm 이상에서는 0.9이상 의 높은 값을 보임
그림 23. 900 MHz 노드 위치에 따른 RSSI와 Tx 출력 비교 그림 24. 2.4 GHz 노드 위치에 따른 RSSI와 Tx 출력 비교 - 1차년도의 경우 RSSI 가 서서히 감소하는 경향을 보임 . LQI 비교 - RSSI와 마찬가지로 아래 그림과 같이 –10 dBm을 기준 으로 하여 –15 dBm의 전송출력이 되는 순간, 대부분의 위치에서 RSSI가 감소하였지만, 다소 유연하게 감소함 그림 25. 900 MHz 노드 위치에 따른 LQI와 Tx 출력 비교
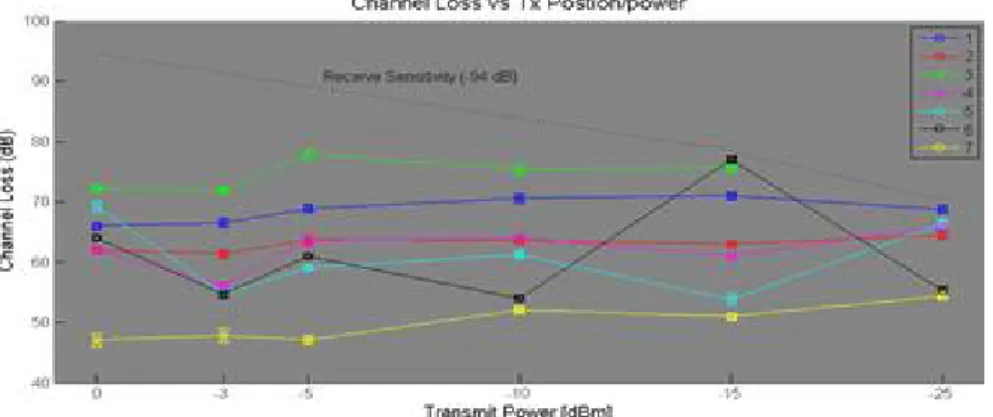
그림 26. 2.4 GHz 노드 위치에 따른 LQI와 Tx 출력 - 1차년도의 경우 LQI 가 –15 dBm 출력에서 일부 감소함 . CL 비교 - 아래 그림과 같이 전송출력의 변화에 따른 채널손실의 값이 70 ~ 80 dB로 고르게 나타나며, -10 dBm 이상의 전송출력일 경우 양호한 수신이 가능함 그림 27. 900 MHz 노드 위치에 따른 CL과 Tx 출력 비교
그림 28. 2.4 GHz 노드 위치에 따른 CL과 Tx 출력 비교 - 1차년도의 경우 CL이 –25 dBm 출력에서 증가하는 경향이 뚜렷함 * 결론 . 900 MHz 대역의 경우 –10 dBm 이상의 전송출력을 보여야 RSSI, LQI 및 CL가 양호한 통신이 가능한 것으로 분석됨 . 1차년도 2.4 GHz의 경우 –15 dBm 이상에서 가능하것으로 도출됨 . 따라서 차량 내 무선 네트워크의 링크 특성 분석 결과 2.4 GHz가 –5 dBm의 저전력 효과를 기대할 수 있고, PRR 및 RSSI 측면에서 우수함 ▪ 차량 내 무선 센서네트워크 적용 대상 센서 분석 * 차량 내 무선 센서네트워크 구성 . CAN 버스와 원격 DTG간 무선 인터페이스 구성은 아래 그림과 같음 그림 29. CAN 버스와 원격 DTG 간 무선 인터페이스
* CAN 버스 . CAN 버스는 CAN 통신을 위한 물리 계층으로 와이어, 커넥터 그리고 종단저항으로 구성된다. CAN은 물리적 매체를 지정하 지는 않지만 다음과 같은 기능을 가짐 - 와이어: 차폐된 꼬임 전선, 선택적 전원이 필요한 경우 에는 추가적인 한 쌍의 꼬임 전선 사용함
- 커넥터: 9 Pin D-Sub 또는 5 Pin Mini-Style - 종단 저항: 120 Ohm * DTG . 디지털운행기록장치(DTG, Digital Tachograph)는 자동차의 속 도, RPM, 브레이크, GPS를 통한 위치, 방위각, 가속도, 주행 거리 및 교통사고 상황 등을 자동적으로 전자식 기억장치에 기 록하는 장치이다. DTG가 갖추어야 할 기능은 다음과 같음 - 차량속도의 검출 - 분당 엔진회전수의 감지 - 브레이크 신호의 감지 - GPS를 통한 위치추적 - 입력신호 데이터의 저장 - 가속도 센서를 이용한 충격감지 - 기기 및 통신상태의 오류검출 . DTG의 외부 인터페이스는 두 가지로 나뉜다. 첫 번째는 차량 정 보를 실시간으로 수집, 분석하게 하여 고객에게 다양한 편의를 제공하기 위하여 이동통신망과 연결하는데 필요한 통신모듈 인터 페이스이고, 두 번째는 운전자 혹은 차량 내 저장장치에 차량 정보 를 제공하기 위하여 차량 내 네트워크와의 인터페이스가 필요하다. 또한, 본 표준에서는 차량 내 네트워크와의 인터페이스를 정의함 * 무선 송수신기 . 무선 송수신기는 CAN 버스와 연결되어 CAN 버스로부터 DTG 로 전달되는 메시지를 추출하여 무선으로 데이터를 전송하거나, 무선 통신 프로토콜을 원활히 수행하기 위하여 필요한 신호를 DTG 무선 송수신기에서 CAN 버스에 연결된 무선 송수신기로 실어 보내는 역할을 담당한다. 무선 송수신기가 갖추어야 할 주 요 기능은 다음과 같음 - CAN 버스와 물리적 연결 - DTG 메시지 필터링
- CAN 2.0B 데이터 포맷을 무선 통신 데이터 포맷으로 변환 - 무선 송수신 * CAN 트랜시버 요구사항 . CAN 컨트롤러와 일체형 디바이스를 사용하거나 단독 디바이스를 사용할 수 있다. . CAN 버스용 전원과 전압을 제어하여야 한다. . CAN 버스의 장애와 정정 기능을 갖추어야 한다.
. CAN 트랜시버와 연결되는 CAN 버스는 CAN 2.0B 규격을 만족하여야 한다. * CAN 컨트롤러 요구사항 . CAN 컨트롤러는 단독 디바이스를 사용하거나 RF 모듈과 일체 형 디바이스를 사용할 수 있다. 또한, 단독 디바이스의 사용을 위한 인터페이스를 제공하여야 한다. . CAN 컨트롤러의 메시지 ID 필터는 DTG에서 사용하는 다수의 메시지 ID1)를 설정할 수 메모리 공간을 제공하여야 한다. 이 때, 메시지 ID는 사용자에 의해 미리 정의된다. . CAN 메시지 ID는 Mask ID 지정이 가능하여야 한다.
. CAN 컨트롤러는 미리 정의된 DTG 메시지 ID가 입력되면, 메 모리에 데이터를 저장한 후 인터럽트를 발생하여야 한다.
. CAN 컨트롤러는 수신 에러 카운터(REC, Receive Error Counter) 를 내장하고, 카운터 값이 255에 이르면 네트워크 상에서 자신의 연결을 off 시킨 후, RF 모듈로 해당 정보를 제공하여야 한다. . CAN 버스 off 시 자동 리셋 기능을 갖추어야 한다. . CAN 컨트롤러는 메시지의 유실을 막기 위하여 2개 이상의 송 수신용 버퍼를 제공하여야 한다. . CAN 수신 메시지 간격이 5 ms 이내인 수신 데이터가 연속적 으로 입력되는 경우에 데이터 병목 현상으로 인하여 CAN 수신 데이터가 유신되는 것을 방지하는 기능을 갖추어야 한다. . 송신 데이터 등록, 변경, 파일저장 기능을 갖추어야 한다. . 수신 데이터의 모니터링 및 로깅 기능을 갖추어야 한다. * RF 모듈 요구사항 . 데이터의 무선 전송을 위한 무선 통신 기술 규격(Zigbee, Bluetooth, Wi-Fi, UWB 등)은 특정하지 않는다. 따라서, 사
1) CAN 프로토콜에서 식별자 ID는 일반적으로 네트워크에서 사용하는 송신처 혹은 수신처의 주소를 의미하는 것이 아니 라 그 뒤에 오는 데이터의 의미를 나타낸다.
용자의 요구조건에 따라 결정될 수 있다. . 무선 통신 모듈과 CAN 통신 사이의 데이터 포맷 변환 기능이 제공되어야 한다. . 무선 통신을 이용한 송수신시 데이터 전송 실패의 판단 여부는 적용된 무선 통신 기술 규격을 따른다. 그러나, 무선 전송 실패 가 일어났을 경우에 CAN 컨트롤러로 전송 실패를 알려주는 신 호를 전송하는 기능을 제공하여야 한다. . RF 모듈의 정상 동작 여부를 알려주는 기능을 제공하여야 한다. * CAN 버스와 CAN 트랜시버 간 인터페이스 . ISO 11898-1 규격의 물리 계층 요구조건을 만족하여야 한다. . 트랜시버는 독립된 IC 형태로 사용 가능하다. . 인터페이스를 위하여 최소 2개의 신호(CANH, CANL)가 필요하다. * CAN 트랜시버와 CAN 컨트롤러 간 인터페이스 . CAN 컨트롤러는 ISO 11898-2 규격의 요구조건을 만족하여야 한다. . CAN 컨트롤러는 독립된 IC 형태로 사용 가능하다. . 트랜시버와 컨트롤러 간 인터페이스는 IC 공급사에서 제공하는 방법에 따른다. . CAN 트랜시버와 컨트롤러가 통합된 하나의 IC 형태로 사용 가능하다. * CAN 컨트롤러와 RF 모듈 간 인터페이스
. CAN 컨트롤러와 RF 모듈 간 인터페이스는 SPI 통신과 GPIO 통신 방식을 사용한다.
* RF 모듈 간 인터페이스
▪ 차량 내 유선 네트워크 및 무선 센서네트워크 연동 인터페이스 기술 개발 * 차량 내 유선 네트워크는 LIN, CAN, K-Line, MOST, FlexRay
등이 사용되고 있음 * 아래의 그림과 같이 CAN과 무선 센서네트워크를 연동하기 위한 인터페이스를 개발함 * 최근 Continental, 현대모비스 등 자동차 부품업체들은 그래픽한 방법으로 디스플레이를 제공하는 방법을 사용하여 슈퍼비젼 클러 스터를 적용하고 있음 * 슈퍼비젼 클러스터의 경우 클러스터에 최적화된 차세대 하드웨어 및 소프트웨어를 기반으로 설계되었고, 차량 주행정보 및 게이지 정보 등을 아날로그 방식이 아닌, 그래픽 디스플레이에 아래 그림 과 같이 표현하고 있음
그림 30. 12.3인치 Full HD Cluster (Continental 社)
* 최근 개발되고 있는 자동차들은 안정성, 안락함 및 편의성을 위주 로 지속적인 연구가 이루어지고 있고, 이에 따른 센서 및 ECU의 개수가 증가하고 있음 * 이에 따라 차량 내 MCU의 적용 분야가 늘어나고 편의 장치와 엑츄에이터의 제어가 요구되고 있음 * 아래 그림은 이러한 요구사항을 반영하여 현 시점에서의 차량 내 MCU 적용 분야와 2015년쯤 추가될 MCU의 사용위치임 * 이러한 최근 기술현황의 주요 내용은 CAN을 이용한 더 많은 MCU를 인터페이싱하고 있고, 본 과제에서는 이를 수용하기
위하여 차량용 클러스터와 DTG의 CAN을 무선통신 구간으로 운용되도록 아래 그림과 같은 모식도를 기반으로 구현함 * 이에 따라 아래의 그림과 같이 CAN 2.0을 지원하는 인터페이스를 개발함 * RF 인터페이스 (CC2500, 2.4 GHz) . 상용화된 대부분의 차량에 적용된 CAN 통신은 2.0A로, 최대 500 kbps의 전송속도를 지원
. 90 usec의 freq. synthesizer를 통해 freq. hopping 및 multi-channel system 개발
. CC2500 초기화, RF송수신, 프로토콜 해석, msg buffering 기능 * 유선 및 무선 네트워크 인터페이스 연동 기술
. CAN msg to RF msg 변환 -> map 테이블을 이용해 변환기술 개발 . CAN ID 분석에 의한 CAN Protocol 자동 인식(2.0A/2.0B) 기술 개발 * 아래의 그림과 같이 유/무선 네트워크 인터페이스 연동을 통한
CAN2RF 노드를 개발함
그림 31. CAN2RF 노드 구성도 및 Layout
그림 32. CAN2RF 노드 회로도
. Cortex M3 chip(STM32F103RE-LQFP64) with CC2500 1) 2 채널 CAN, 2.4 GHz RF
3) 우선 순위에 따른 RF 송수신 기능 (CAN priority 에 따른 Arbitration 지원)
4) SMA 및 Chip antenna selectable PCB 구조 : CAN2RF v1.0
그림 33. CAN2RF 노드 ver 1.0
그림 35. CAN2RF 노드 ver 2.0
* CAN 과 RF 연동 시험 단방향 PER : 최대 2 % PER
. 1 sec, 200 msec, 50 msec, 20 msec 및 10 msec 단위로 100개 packet 전송, 3회 시험 결과 그림 36. CAN2RF 노드 단방향 연동 시험 ▪ 차량 무선 센서네트워크 전송 보안 적용 기술 설계 * 차량 내/외 무선 통신의 경우, 차량 내 통신 데이터들이 차량 외부 및 승 인 받지 않은 다른 노드로 데이터가 유출되지 않도록 암호화 되어야 함 * 뿐만 아니라, 인증 받지 않은 노드가 차량 내부로 잘못된 데이터 및 차량 컨트롤 정보를 보내고자 할 경우, 이를 차량 내 통신 장 치가 감지하고 수신을 방지할 수 있는 패킷 인증 절차가 필수적임 * 기 언급된 문제를 해결하기 위한 차량 내 무선 센서네트워크 전송 보안 기술로써 아래의 그림과 같이 기 검증된 AES-CCM (Counter with CBC-MAC) 기법을 설계 및 개발함
. AES-CCM의 경우, counter mode에서 encryption에 사용되 는 key와 CBC-MAC mode에서 노드의 인증에 사용되는 key
를 동일하게 사용함으로써 암호화/복호화와 인증을 동시에 사용 1) AES Counter mode: AES의 Counter mode는 정해진 블 록마다 counter를 증가시키며 동일한 key를 이용하여 cipher 블록을 생성하는 모드임. 즉, AES Counter mode 는 전체 과정에서 차량 통신에 사용된 데이터를 다른 디바 이스가 정상 수신하지 못하도록 데이터를 암호화/복호화 하는 과정임 2) AES CBC-MAC: 보안에 있어서는 나의 데이터를 남이 알 아보지 못하도록 하는 암호화/복호화도 중요하지만, 정상적 으로 인증되지 않은 데이터가 해당 시스템에 영향을 끼치지 못하도록 데이터를 인증하는 절차도 중요함. 특히, 자동차의 경우, 인증되지 않은 노드로부터 컨트롤 메시지가 도착한 경우, 이를 무시할 수 있어야 함. CBC-MAC은 AES Counter mode에서 사용하는 AES key를 사용하여 인증을 위한 MAC 코드를 생성하고 수신 시, 이를 이용하여 데이 터를 인증하는 과정을 수행함
3) AES-CCM mode: AES-CCM에서는 앞서 언급한 AES Couter mode와 AES CBC-MAC 과정을 모두 수행하는 보 안 프로토콜로, AES의 동일한 key를 사용할 뿐만 아니라, 네트워크에서 헤더 정보를 MAC 코드 생성에만 사용하고 암 호화 하지 않도록 함으로써 헤더의 정보까지 인증에 사용하 여 안전성을 높이면서도 네트워크 명령어 수행은 가능하도 록 지원함. 또한, MAC 코드 역시 암호화함으로써 보안성을 높임. AES-CCM의 전체 과정 수행 중, AES CBC-MAC에 따른 인증 코드 부여와 AES-CTR에 따른 패킷 및 MAC 코드 암호화 과정 전체를 보여줌
그림 37. AES-CCM 모드 적용 설계/구현을 위한 구조도
그림 38. 실제 패킷 구조에서의 AES-CCM 과정
* STM32F103x MCU에서의 Cryptographic library package를 이용하여 AES-CCM 구현
. STM chip vender에서 제공하는 cryptographic library package를 현재 센서노드 플랫폼에 import (e.g., 필요 헤더, 파라미터 설정, 라이브러리 설정)
그림 39. IAR compiler에서의 library package 구성 및 헤더 파일 구성 예 . 데이터만을 암호화하고, 헤더 정보는 노출하는 대신 인증과정에 서는 사용하도록 초기화, 암호화, 복호화(인증 포함) 함수 구현 . 인증 코드 생성 및 암호화, 데이터 인증 및 복호화를 위한 함수 의 호출 순서는 아래와 같이 구현 그림 40. AES-CCM 내부 함수 구조도 . 내부 함수는 앞서 설명한 library package에 구성되며, 이를 정상적으로 사용하기 위해서는 아래 그림과 같이 변수들 (e.g., key값, 암호화 구조체 변수 등)이 초기화되어 있어야 함
그림 41. AES-CCM 사용을 위한 초기값 (key, iv, 구조체 등) * AES-CCM 기법의 정상 동작을 확인하기 위해, 아래의 그림과 같이 센서노드 플랫폼에서 임의의 데이터를 암호화 하고 정상적 으로 복호화 하는 과정을 시험함 . 지정된 데이터를 순서대로 암호화하여 전송 후, 수신에서는 인증된 패킷인지 여부를 확인하고 복호화하여 정상적인 데이터를 수신 그림 42. AES-CCM 시험 결과 (암호화/복호화 및 인증)
▪ 고정 및 이동 차량 탑재 MAC 프로토콜 시험 및 검증 기술
* 기존 차량 내 통신은 주로 Controller Area Network (CAN) 표준을 사용하며, CAN은 Bus를 이용하는 유선 통신임
* 늘어나는 차량 내 ECU의 증가로 인해 CAN 표준 ECU 간의 통신 중 일부에 대한 무선화가 최근 차량 내 통신의 이슈이며, CAN Bus 간의 통신을 무선으로 대체 후 실험 결과를 분석함 으로써 기존 CAN 통신을 무선화 하는데 필요한 자원 할당 및 시스템 구조 설계에 사용 * 제안 플랫폼은 CAN 표준 통신을 지원하는 동시에 500 kbps의 무선 통신을 수행하며, 서로 다른 두 통신 방법 간의 bridge 역할을 수행함 * CAN-RF 통신 시험 . 시험 환경 1) 표준 CAN 통신과의 호환성 확인 및 종단의 CAN 메시지의 정상 출력을 확인하기 위해, Vector 사의 CANoe 장비를 각 노드의 종단에 연결하여 실험을 위한 packet generation과 동시에 수신된 CAN 패킷의 정상 여부를 확인함 2) CAN-RF 장비를 각각 서로 다른 클러스터에 부착함. 단 노 드 1은 CAN Bus를 CANoe의 채널 1에 연결하여 CANoe 로부터 생성된 패킷을 수신하며, 노드 2의 CAN Bus를 CANoe의 채널 2에 연결하여 최종 RF-to-CAN 데이터의 정상 수신 여부를 확인함. 클러스터 1과 클러스터 2는 서로 분리된 CAN Bus에 연결되며 각 CAN Bus를 CAN-RF 노 드를 통해 무선으로 연결 3) 실험에서 CANoe는 서로 다른 주기의 패킷을 실험 순서 에 따라 생성 및 전송하며, 클러스터가 생성하는 데이터 역시 Bus 연결을 통해 전송함. 단, CANoe는 RPM과 속 도 데이터를 생성하고 전달함으로써 서로 다른 두 클러스 터의 RPM과 속도값이 똑같이 전달되어 화면에 나타나는 지 확인할 수 있음
그림 43. CAN-RF 통신 시험 환경
. 시험 결과
1) 우선, 단일 패킷을 서로 다른 주기로, 단방향으로 전송 시, CAN-RF 간의 패킷 전송률(Packet Reception Ratio, PRR) 및 패킷 전송에 걸리는 시간(Latency)을 측정. 10000개의 패킷을 전송했을 때, 아래 그림과 같이 패킷의 주기가 10 msec 정도의 짧은 주기에서도 거의 대부분 (>99 %) 패킷을 정상 수신하며, 약 3 msec 정도의 latency를 보여줌 그림 44. 단방향, 단일 패킷 전송 시 packet interval에 따른 PRR 및 latency 2) 동시에 서로 다른 주기를 가진 패킷을, 단방향으로 전송 시, CAN-RF 간의 패킷 전송률을 측정. 앞서 실험과 마찬가지 로 약 10000개의 패킷을 각각 20 msec, 100 msec, 20 msec, 20 msec의 주기로 전송했을 때, 각 패킷의 패킷 전
송률은 아래 그림과 같이 거의 대부분 정상 수신함 (>97 %). 단, 각 패킷의 전송 시간은 아래 그림과 같이 패킷의 수 가 늘어남에 따른 전송 지연이 발생함 (단, 지연 시간은 평 균 2 msec 이하) 그림 45. 단방향, 서로 다른 주기의 서로 다른 패킷을 동시에 전송 시, 패킷의 수에 따른 PRR 그림 46. 단방향, 서로 다른 주기의 서로 다른 패킷을 동시에 전송 시, 각 패킷의 latency 3) 동시에 서로 다른 주기를 가진 패킷을, 양방향으로 전송 시, CAN-RF 간의 패킷 전송률을 측정. 노드 A의 전송 주기를 각각 1 sec, 20 msec으로 고정하고 노드 B의 전송 주기를 10, 20, 100, 1000 msec으로 증가시켰을 때의 노드 A 및 노드 B에서의 패킷 전송률을 측정. 아래 그림과 같이 서로 다른 두 노드가 동시에 빠른 주기로 전송하고자 하는 경우 패킷 전송률이 감소함. 빠른 전송 주기에서의 패킷 재전송 에 따른 패킷 전송 실패를 방지하기 위해 재전송 기법을 제
외하였으며, 패킷의 수신 인터럽트에 따른 송신 연기로 인 한 패킷 전송률 감소. CAN-RF 통신에서 무선 채널의 capacity에 대한 적절한 margin을 두고 CAN-RF 시스템 을 설계해야지만 정상적인 CAN-RF 통신이 가능함 그림 47. 양방향, 서로 다른 주기의 패킷을 동시에 전송 시, 노드 A, B에서의 각 패킷의 PRR * CAN-RF 통신 시험 결과 . 현재 구성된 무선 통신은 500 kbps의 통신 속도를 가지며, 송신과 수신을 동시에 수행하지 못하는 구조임 . CAN 통신에 있어 전송 주기가 짧고, 주기적으로 전송해야하는 패킷이 많은 경우에는 각 CAN Bus의 데이터를 전송하기 위한 무선 채널을 늘이는 방향이 필요함 . 무선 통신은 CAN Bus 유선 통신에 비해 구조적으로 안정성에 차이가 있으며, 실험 결과로도 완벽한 수준의 구성은 힘듬. 그 럼에도 불구하고 특정 범위내에서는 우수한 성능을 보임 . 보다 효율적이고 안정성이 높은 CAN-RF 시스템을 위해서는 가급적 CAN 패킷의 전송 방향이 단방향인 Bus를 무선으로 연 결하는 것이 바람직하며, 전송주기가 짧은 CAN 패킷은 서로 다른 무선 채널로 전송하도록 설계될 필요가 있음 * Channel Hopping 통신 시험 . 채널 호핑 정의 1) 채널 호핑은 정상적인 데이터 통신중 채널의 통신 성공률이 현저히 떨어질 경우 채널 충돌이 발생하였다고 판단을 하고 미리 정해진 예비 채널중 가정 통신환경이 좋은 채널로 천
이하여 정상적인 데이터 전송을 수행하는 것으로, Hopping Time(Ht) = Channel Change Time(Ct) - Jamming Rec Time(Jt)으로 나타낼 수 있음 . 시험환경 1) 데이터 통신을 위한 통신노드 2) 통신중 air 구간에서 데이터를 캡쳐할 수 있는 패킷 스니퍼 3) 해당 채널의 데이터 통신을 방해를 위핸 데이터 발생기 (Jammer) PAN 코디네이터 (싱크노드) UART(USB) IEEE 802.15.4 사용자 터미널 (PC) 코디네이터 (라우터 노드) 센서노드 USB 허브 IEEE802.15.4 UART(USB) UART(USB) 사용자 터미널 창 0x0000 0x0004 0x0001 무선 패킷 분석기 간섭전파 발생기 그림 48. 통신 환경 구조도 . 시험 결과 1) 특정 채널에서 정상적인 데이터 송수신중인 노드를 확인 그림 49. 정상적인 데이터 송수신
2) 패킷 발생기를 이용하여 해당 채널 주파수 대역을 입력하고 Jamming 기능을 수행함 그림 50. 실험 설정값 입력 3) 데이터 송수신 중인 노드의 터미널과 RF구간의 패킷을 캡 쳐 할 수 있는 스니퍼를 이용하여 안정적인 채널을 선택하 여 정상적인 통신하는지를 확인하고, Jamming을 인식하고 다른 채널로 변경하여 시간을 측정함 그림 51. 채널 변경 과정 4) 따라서 위의 결과와 같이 채널 호핑타임은 0.113초(Ht) = 17:54:32:776(Ct) - 17:54:32.663초(Jt) 임
o 차량 내 임의설치가 가능하고, 저전력 처리가 가능한 차량 내 무선 센서노드 개발 - 우선순위/이벤트/샘플링주기기반 차량 내 무선 센서노드 데이터 처리 기술 개발 - 저전력 프로세싱 및 우선순위 등 데이터 처리 모듈이 탑재된 무선 센서노드 S/W 개발 - 차량 운행 환경에서 내구성을 보장하는 소형, 저전력 무선 센서노드 H/W 개발 및 제작 - 차량 내에 설치 및 유지보수 편의성을 제공하는 무선 센서노드 하우징 개발 및 제작 - S/W, H/W, 하우징이 통합된 차량 내 무선 센서노드 개발 및 제작 ▪ 공통 하드웨어(H/W) 개발 * 무선 센서노드 하드웨어는, 크게 MCU부, RF 통신부, Wake-Up 모듈부, 전원부, 응용 어플리케이션부로 분류함 * 센서노드를 구성하는 요소 중, MCU부. RF 통신부, Wake-Up 모듈부, 전원부와 같이 공통 하드웨어 구조로 기반을 만들고, 응 용 어플레이케이션에 따라 추가적으로 하드웨어를 확장시키는 형 태로 플랫폼을 구성하도록 설계 그림 52. 무선 센서노드 센서부 블록
그림 53. 무선 센서노드 PCB 디자인 * 무선 센서노드는 RF통신부, MCU부, 어플리케이션부, Wake-Up 모듈부와 같이 회로도를 각 PCB에 분리하여 디자인하였으며, 스택 구조로 결합하여 사용함 * 본 무선 센서노드 개발에서는 MCU와 RF 통신부는 하기에 기재된 칩을 이용하여 공통 하드웨어 구조로 이용되며, 추후 차량 통신 규격 및 성능 요구사항에 따라서는 RF 통신부 및 MCU를 변경할 수 있음 그림 54. 무선 센서노드 MCU부 블록
* MCU부
. MCU부는 Texas Instruments社의 MSP430 Series중 저전력 고성능 마이크로 컨트롤러인 MSP430F2618을 사용하였으며, 초소형의 형태로 제작하기 위해 113BGA 패키지모델인 MSP430F2618TZQW를 기반으로 설계함 . MSP430 시리즈는 여러 단계의 절전모드를 지원하여 저전력 어플리케이션에 적합한 마이크로 컨트롤러이며, Standby mode 일 경우 0.1 uA로 매우 작은 전류를 소비하여 배터리 기반의 하드웨어 설계에 용이함 그림 55. MSP430F2618 내부 블록도
. MCU 내부에 12Bit SAR ADC를 내장하고 있고, 코어의 클럭 은 16 MHz까지 동작 할 수 있으며, 센서의 아날로그 신호를 ADC하고 이산 값을 획득 가능함
. MCU 내부의 Timer 기능을 이용하여 MCU에 축적되는 TASK 를 주기적으로 처리할 수 있음
그림 56. JTAG 및 Debug UART 인터페이스 회로도
* JTAG 및 UART 인터페이스
. JTAG은 IDE개발 환경에서 MCU가 제공하는 모든 기능을 확인 할 수 있으며, 내부 레지스터의 상태를 개발 프로그램을 통하여 값을 확인 및 적용할 수 있음
. JTAG의 신호는 각각 TDI, TMS, TCK, nTRST, TDO로 5개의 신 호로 구성 되어있으며, 개발의 편의를 위해 UART 포트를 추가함 . JTAG가 지원하는 UART 포트를 이용하여 시리얼 통신 RS-232
그림 57 무선 센서노드 RF통신부 블록 * RF통신부 . RF통신부는 ISM band 2.4 GHz 영역의 주파수 신호를 이용하 며, RF 트랜시버로는 TI사의 CC2500을 적용하였으며, 앞서 정리한 MCU와 SPI/GPIO로 인터페이스 되어있음 . RF통신부 회로는 소형으로 설계하기 위해 Passive소자로 구성한 Balun회로를 Balun Chip을 사용하여 회로의 면적을 줄였음
그림 58. 무선 센서노드 RF통신 안테나
. RF통신부와 연결되는 안테나는 무선 센서노드의 소형화 제작을 위해 PCB에 실장이 가능한 칩 안테나를 이용함
그림 59. 무선 센서노드 전원부 블록 * 전원부 . 전원부는 배터리(1차 전지 3.6 V)를 사용하며, 안정적인 전원을 공급하기 위해 LDO를 추가하여 설계함 . 센서부에 공급되는 전원을 제어하기 위해 FET를 이용하여 MCU부에서 제어 할 수 있도록 설계함 1차 전지 MCP1700LDO 3.6V 배터리 모니터링(ADC) ½ divider MSP430F2618 ADC 그림 60. 무선 센서노드의 배터리전압 모니터링 . 배터리의 전원 상태를 확인하기 위해 배터리의 전압을 저항으로 분배하여 ADC에 연결함
그림 61. 무선 센서노드의 Wake-Up 모듈부 * Wake-Up 모듈부 . Wake-Up 모듈부는 차량 시동 off 상태와 같이, 베이스스테이션으 로부터 장기간 센서노드에게 명령이 주어지지 않을 때, 센서노드의 RF 통신부의 동작을 제한하여 저전력을 구현하기 위해 사용됨 . Wake-Up 모듈이 구동 시에는 MCU와 RF모듈은 각 LPM4, LPM2 모드로 전환되어, 최소 전력으로 구동함 그림 62. Wake-Up 리시버 구동 방법
. Wake-UP 리시버는 AMS 사의 AS3933을 이용하며 해당 리시 버는 15~150 kHz의 LF(Low Frequency)를 수신하는 제품임 . Wake-Up 모듈부는 트랜시버로부터 2.4 GHz 통신 주파수
영역대로 전송되는 신호를 수신하게 되며, 이를 135 kHz로 변환하여 리시버가 판별하도록 회로를 설계함
▪ 공통 소프트웨어(S/W) 개발
* 무선 센서노드 소프트웨어는 MCU가 수행하는 TASK 관리 모듈, HAL 모듈, 무선 통신 MAC 모듈, 그리고 무선 센서노드에 추가적 으로 결합되는 응용 어플리케이션에 필요한 구동 TASK를 포함함 * TASK 관리, HAL 모듈, TDMA 모듈과 같이 무선 센서노드의
기본적인 동작을 수행하기 위한 파트를 USER TASK MANAGER로 통괄하여 공통 소프트웨어 구조로 구성함 그림 63. 무선 센서노드의 S/W 논리 구조 * TASK 기반 데이터 처리 기술 . 응용 어플리케이션 TASK에는 추가 하드웨어 모듈인 센서부를 구동시키는 파트와, 데이터 취득을 위한 파트, 그리고 센서부의 전원을 제어하는 파트로 구성됨 . 응용 어플리케이션 TASK의 센서부 전원 제어는 응용 어플리케 이션이 사용되지 않을 때 불필요한 소비 전력을 줄이기 위해 센 서부의 전원관리를 제어함 . 베이스스테이션과 연동하기 위한 무선 통신 MAC은 TDMA 기반으로 설계된 PDDCH(Pre-Detection Dynamic Channel Hopping)을 MAC으로 사용함 . 무선 센서노드는 TASK 기반으로 동작을 수행하도록 설계되었으며,
System timer를 기준으로 TASK를 관리하여 1 msec 주기로 수행 해야 되는 TASK가 있는지 확인함
그림 64. 무선 센서노드 동작 순서도 . 무선 센서노드는 초기화 관련 처리를 수행하고 그 작업이 완료 되면 어플리케이션을 통해 생성된 TASK 또는 MCU에서 제공 하는 interrupt 기능을 통해서 추가되는 TASK를 수행함 . 일부 TASK에는 수행 우선순위를 부여하여, 해당 TASK를 우 선적으로 수행하거나, 주기적으로 베이스스테이션과 통신하는 TASK처럼 정해진 시간에 수행해야 하는 TASK에 대해서는 상황 별로 우선적으로 수행시키도록 구현됨
그림 65. TDMA 기반 MAC의 Superframe 구조
. 무선 센서노드는 시각 동기화 및 실시간 송수신을 위하여 superframe 구조를 지원함
. 무선 센서노드는 TDMA 기반의 MAC에 의해 베이스스테이션 과 100 msec 마다 주기적으로 Beacon 동기화를 수행함
. Beacon 동기화가 진행되는 한 주기 동안에 센서노드는 Beacon 수신, CAP(Contention Access Period), CFP(Contention Free Period) 구간을 가지게 되며, 해당 구간 동안에 RF 모듈부를 구동시킴
. Superframe은 1 slot당 3 msec 로 할당되어 있으며, CAP 구 간은 2 slot을 사용하여 총 6 msec 동안 수행됨
. 무선 센서노드는 베이스스테이션으로부터 Broadcast로 전송되는 Beacon을 수신하여 무선 센서노드 내부 Timer를 동기화시킴 . Beacon 수신은 Superframe 구성 중 7 msec를 할당하며, 이보다 더 짧
게 할당할 경우, Beacon 수신이 원활하게 진행되지 않는 경우가 있음 . 무선 센서노드는 할당된 고유 Time Slot 구간에서 베이스스테이션과 1:1 데이터 송수신 TASK를 수행할 수 있음 ▪ 무선 센서노드 공통 성능 * Wake-Up 모듈부 수신 거리 측정 . 센서노드에 설치된 Wake-Up 리시버는 베이스스테이션에 설치된 Wake-Up 트랜시버로부터 전송되는 파장을 수신할 수 있어야 함 . 차량 내에서 Wake-Up 통신이 가능한 최대 전송거리를 측정하 기 위해 성능 시험환경을 구성하여 시험한 결과, LOS상에서 약 8 m(Wake-Up모듈 높이 지면으로부터 1 m), 차량 내 Non-LOS 환경에서 약 3.5 m의 전송거리에서 100 % PRR을 보임 그림 66. 차량 내 wake-up 센서테그 시스템 통신 전송거리 시험 및 결과 * 소비 전류량 측정 . 무선 센서노드는 배터리로 구동하기 때문에 소비전류가 최대한 낮게 사용되도록 동작시킬 필요가 있음
그림 67. MCU 저전력 실험 파형 측정
. 무선 센서노드를 저전력으로 운영하기 위해서 MCU 및 RF 모 듈의 저전력모드(LPM = Low Power Mode)를 이용함
. MCU를 LPM3로 Sleep 시킬 경우, 메인 클럭(MCLK)이 외부 클럭(XT2) 의 경우에는 의도치 않게 정상적인 동작을 하지 못하는 상황이 발생함 . 메인 클럭(MCLK)을 내부 DCO를 사용함으로써 Active 기능으로 안 정적으로 전환될 수 있으며, DCO 클럭별 소비 전류는 다음과 같음 DCO Clock 종류 소비 전류 16 MHz 8.17 mA 8 MHz 4.29 mA 4 MHz 2.18 mA 1 MHz 618 uA 표 10. DCO 클럭별 소비 전류 . RF 모듈에 사용된 CC2500 의 LPM는 LPM1과 LPM2로 나누어지 며, 각 전력 소비는 다음과 같음
그림 68. MCU 저전력 실험 파형 측정 . RF 모듈에 사용된 CC2500 의 LPM는 LPM1과 LPM2로 나누어지 며, 각 전력 소비는 다음과 같음 기능 소비 전류 LPM1 175 uA LPM2 30 uA 표 11. CC2500 동작별 소비 전류 . 초기 버전에서는, CC2500의 LPM1에서 Active Mode로 전환 하여 동작시키는 프로그램은 정상적으로 동작하나, LPM2모드에 서 AM(Active mode)로 동작시키고자 할 때 정상적으로 MAC 이 동기화 되지 못하고 시스템이 초기화되는 현상이 발생하였음 . CC2500의 datasheet에 의하면 LPM에서 Active mode로 전환하여,
안정화될 때까지 소요되는 시간을 최소 200 usec으로 권장하고 있음 . 안정화 시간을 측정해본 결과, CC2500이 LPM2에서 Active Mode로 전
환되며, 안정적으로 동작할 때까지 걸리는 시간은 265 usec로 관찰됨 . 안정화에 걸리는 지연 시간 정보를 위와 같은 측정 시간 값으로
그림 69. 무선 센서노드의 Beacon 동기화 한 주기에 소비되는 평균 전류 프로파일
. 무선 센서노드는 7 msec로 할당된 Beacon 구간과 6 msec 로 할당된 CAP 구간 동안 Rx 모드로 구동되며, 해당 구간에서의 평균 소비 전류는 39.7 mA 로 측정됨 . 무선 센서노드의 저전력 구현을 위해 TASK가 수행되는 시간을 제외한 모든 구간에서 MCU와 RF 모듈을 LPM로 전환하여 불 필요한 전류 소비를 차단함 . MCU와 RF 모듈을 LPM으로 동작시키는 동안에 소비되는 펑균 전류는 약 0.16 mA 로 측정됨 . 무선 센서노드가 TDMA 동기화를 위해 소비되는 평균 전류량은 약 5.6 mAh 이며 하루에 TDMA 동기화를 위해 약 134.4 mA 임 . Wake-Up 모듈을 적용하게 되면, 차량 시동이 꺼져 있을 경우 와 같이 불필요한 TDMA 시간 동기화를 줄일 수 있음 . Wake-Up 모듈을 통해 TDMA 동기화를 수행하지 않을 시, MCU와 RF 모듈은 각 LPM4, LPM2 모드로 전환되어 있으며, 각 모듈의 소비 전류의 합은 2 uA 수준임 . 하루 21시간 동안 차량 시동이 꺼져있다고 할 때 TDMA 동기화를 유 지할 시, 약 117.6 mA가 소비되며 이를 Wake-Up 모듈을 적용할 경우 42 uA 가 소비됨으로 99 % 이상 소비 전류를 줄일 수 있음
o 차량 내 무선 센서노드 연동을 위한 실시간 센서 스트링 처리 지원차량 내 베이스스테이션 개발 - 우선순위/이벤트/센서신호샘플링주기 기반 다중 무선 센서노드 처리 기술 개발 - 베이스스테이션 시스템 구동 소프트웨어 및 드라이버 고도화 - 단일 무선 센서노드 지원용 베이스스테이션 S/W 개발 - 차량 운행 환경에서 내구성을 보장하는 베이스스테이션 H/W 개발 및 제작 - 차량 내에 설치 및 유지보수 편의성을 제공하는 베이스스테이션 하우징 개발 및 제작 - S/W, H/W, 하우징이 통합된 단일 무선 센서노드 지원 및 차량 내 유선 네트워크 독립형 베이스스테이션 개발 및 제작 ▪ 차량 내 무선 센서노드 연동을 위한 베이스스테이션 플랫폼 개발 그림 70. 베이스스테이션 플랫폼 인터페이스 블록도 * 차량 내 무선 센서노드와의 연동을 위한 베이스스테이션을 개발 하는데 있어 응용서비스에 따라 유연하게 대응이 가능하도록 베 이스스테이션의 H/W플랫폼 인터페이스를 설계하여 이를 공통으 로 사용하는 모듈을 개발하였음 * 기본적인 차량 내 무선 센서네트워크를 지원하는 베이스스테이션 은 전원모듈과 MCU모듈 그리고 최소 하나 이상의 통신 모듈을 이용하여 서비스가능하도록 설계함
그림 71. WASN 플랫폼 공통 인터페이스
* 베이스스테이션 플랫폼 인터페이스는 전원, I/O, Analog, Serial Communication등의 인터페이스를 공통으로 사용할 수 있도록 설계함 그림 72. 차량 내 임의 설치가 가능한 시가잭 타입의 베이스스테이션 블록도 * 앞서 소개한 베이스스테이션 플랫폼 인터페이스를 이용하여 위와 같이 차량 내 무선 센서네트워크를 지원하고 스마트폰의 어플리케이션과 연 동이 가능한, 차량 내 임의 설치가 가능한 베이스스테이션을 개발하였음 * 베이스스테이션에는 전원모듈과 MCU모듈, 그리고 차량 내 무선 센서네트 워크를 위한 RF모듈과 스마트폰에 연동되는 블루투스 모듈로 구성하였음 ▪ 차량 내 무선 센서네트워크의 저전력 구동 기술 * 차량 내 무선 센서네트워크의 수준 높은 전원관리를 위하여 Wake-Up기술을 적용하였음 * 이는 MCU 및 RF 트랜시버의 전원을 보다 효율적으로 관리 할 수 있는 기술임
그림 73. Low Frequency Wake-Up 3D안테나
그림 74. X-Y축 Low Frequency Wake-Up 적용 보드
* Wake-Up 리시버는 LF(Low Frequency)를 사용한 솔루션이 제공되 고 있으나, 낮은 주파수(135 kHz 이하)를 이용하기 때문에 상대적으 로 안테나의 크기가 UHF대역의 안테나에 비하여 많은 부피를 차지함 * 해당 기술을 채택할 경우 센서노드의 초소형 플랫폼에 장착이 불가능한 형태이며, 또한 Wake-Up 트랜스미터모듈이 추가되는 베이스스테이션의 TX안테나 역시 시가잭 형태의 하우징에 적용 할 수 없는 크기를 가짐 * 이를 효과적으로 차량 내 무선 센서네트워크에 적용하기 위하여 다음과 같은 기술을 적용하여 설계를 진행함 그림 75. UHF Wake-Up 리시버 블록도
* Wake-Up 리시버의 구성을 위와 같이 하여, UHF대역의 주파수 를 이용하고 이를 정류하여 LF Wake-Up 리시버에서 인식 할 수 있는 신호로 변환하도록 설계하였음 * UHF주파수를 이용하여 LF Wake-Up 리시버에 신호를 변환하기 위해서 는 트랜스미터 측에서 OOK(On-Off Keying) 모듈레이션을 지원해야 함 * 2.4 GHz의 주파수와 추후 Sub 1 GHz 대역의 시스템을 지원할 수 있도록 CC1100과 패키지 및 레지스터 호환을 가지는 CC2500을 적용하여 설계하였으며, RF통신 모듈과 동일함 그림 76. UHF Wake-Up 트랜스미터 모듈 * 베이스스테이션은 WASN 하드웨어 플랫폼 인터페이스를 통하여 전원을 공급받게 설계 되었으며, 베이스스테이션의 전원모듈은 차 량의 시가잭 소켓에서 12 V전원을 공급받아 이를 3.6 V로 감압 하여 사용 할 수 있도록 설계함 * 차량 내 발전기의 노이즈 혹은 베이스스테이션의 전기적 문제로 인하여 차량에 문제를 발생하지 않기 위해 보호회로 및 노이즈 필터를 내장함 그림 77. 베이스스테이션 전원부 블록도 * 베이스스테이션의 소형화에 따라 차량 내 시가잭에 설치되어 운용 가능한 형태로 개발하여 손쉽게 설치 및 운용이 가능한 구조를 가지고 있음
* 베이스스테이션은 제한적인 전원공급원을 사용하기 때문에 이에 따라 전원부에 2차 전지를 추가하여 전원 이중화 설계를 하였음 그림 78. 베이스스테이션 전원부 회로도 * 베이스스테이션은 차량 내 시동이 Off되어 차량 내 전원공급이 차단되었을 때, 2차 전지로 전원을 전환하여 안정적으로 시스템 을 종료 할 수 있도록 네트워크 운용을 종료함
* 베이스스테이션의 전원이 off 되기 직전에 센서노드에게 Sleep Mode로 전환하도록 명령을 내리며, 해당 명령이 전송 완료되었을 때 MCU를 통해 2차 전지로부터 공급전원을 Off할 수 있도록 설계함 ▪ 베이스스테이션 MCU모듈 그림 79. 베이스스테이션 MCU모듈 * 베이스스테이션에 MCU로 사용한 칩셋은 MSP430시리즈의 F5438A-EP 모델이며, EP모델은 영하 40도에서 영상 125도까지 동작이 가능한 칩셋임
* 해당 MCU는 저전력 동작을 지원하고, 최대 25 MHz클럭으로 동 작이 가능하며, Flash메모리와 SRAM을 내장하고 있으며 GPIO, 다양한 Serial Interface, DAM채널, 12 bit 해상도를 가지는 ADC, 3개의 16 Bit Timer등을 내장하고 있음
* 해당 모듈의 크기는 20 mm x 15 mm의 크기로 설계함 ▪ 차량 내 무선 센서네트워크를 위한 베이스스테이션 RF모듈 * 차량 내 무선 센서네트워크를 위한 베이스스테이션의 RF모듈은 센서노드와 동일한 칩셋으로 CC2500을 이용하여 적용하였으며, 베이스스테이션 플랫폼 인터페이스를 적용하였음 그림 80. 무선 센서네트워크용 RF 모듈 그림 81. 무선 센서네트워크용 RF모듈 출력측정 ▪ 스마트폰 연동을 위한 블루투스 RF모듈 * 차량 내 무선 센서네트워크에서 발생되는 정보를 사용자에게 전달하 기 위하여 스마트폰을 매개체로 하였고, 스마트폰과 별도의 외부 장 치를 추가하지 않고 통신하기 위하여 블루투스 모듈을 적용하였음