2016년 12월 16ZC1900
조선해양 및 육상플랜트를 위한 스마트 H
SE
시스템 개발
세부과제 연차실적 보고서
연차실적 보고서
과제유형 1. 기초미래선도형 ( ) 2. 공공인프라형 ( ) 3. 산업화형 (○ ) 대과제명 SW.콘텐츠 기초·원천기술 개발 세부과제명 조선해양 및 육상플랜트를 위한 스마트 HSE 시스템 개발 세부과제 책임자 소속 및 부서 조선해양IT연구실 직위 (직급) 실장(책임연구원) 성명 장 병 태 총연구기간 2015 년 1 월 1 일 부터 2020 년 12 월 31 일 까지 ( 72 개월) 당해연도 연구기간 2016 년 1 월 1 일 부터 2016 년 12 월 31 일 까지 ( 12개월 ) (2차년도) 총 연 구 비 정부출연금 9,786,560 천원 당 해 년 연 구 비 정부출연금 1,677,312 천원 민간부담금 1,949,500 천원 민간부담금 350,000 천원 계 11,736,560 천원 계 2,027,312 천원 참여인력(M/Y) 총 연 구 기 간 125 명 ( 59.65 M/Y) 당해연도 연구기간 31 명 ( 11.82 M/Y) 참여기관 기관명 연구책임자 기관명 연구책임자 참여연구기관 ㈜비피앤솔루션 박부곤 ㈜대명엘리베이터 강영관 위탁연구기관 전북대학교 손해원 키워드 (6~10개) 플랜트, 대규모 작업장 통신 모델링, 작업장 환경 측정 센서, 작업자 측위, 사고 추론, 3D 맵 모니터링, 스마트 안전장구, 스마트 게이트 정부출연금사업 연차평가 보고서를 제출합니다. 2016 년 12 월 일 세부과제책임자 : 장 병 태 (인) 직 할 부 서 장 : 한 동 원 (인)한국전자통신연구원장 귀하
목 차
Ⅰ. 해당 연도 추진 현황 ··· 1 Ⅰ-1 당해연도 개발 목표 및 개발 내용 ··· 1 1. 연구목표의 달성도 ··· 1 2. 연구목표 수준의 타당성 ··· 2 3. 수행체계 및 전년도 평가결과 조치사항 ··· 5 가. 연구개발 수행체계 ··· 5 나. 전년도 평가결과 조치사항 ··· 7 Ⅰ-2 당해년도 추진 실적 ··· 10 1. 국내외 기술동향 및 기술수준 요약 ··· 10 2. 성과지표 달성실적 ··· 16 3. 주요 성과물 ··· 40 4. 정량적 성과 ··· 44 Ⅰ-3 당해연도 연구개발 추진내역 ··· 47 1. 품질경영 ··· 47 2. 추진체계 ··· 48 3. 세부연구결과 ··· 49 가. 해양/플랜트 환경 적응형 유무선 통신 최적화 기술 개발 ··· 49 나. 해양/플랜트 사고 판단 및 대응 기술 개발 ··· 86 다. 스마트 안전장구 기술 개발 ··· 102 라. 스마트 게이트 기술 개발 ··· 161 마. 선박 엘리베이터 작업현장에서의 안전관리 기술 개발 ··· 181 바. 조선해양 ICT 기업현황 및 기초데이터 DB 구축 ··· 212 Ⅱ. 결론 및 차년도 계획 ··· 217 Ⅲ. 사업비 사용현황 ··· 218 Ⅳ. 기업 재무건전성 현황 ··· 222 Ⅴ. 자체보안관리진단표 ··· 224 Ⅵ. 유형적 발생품(연구시설, 연구장비 등) 구입 및 관리 현황 ··· 225표 목차
표 1-1 면의 재질과 전기적 상수 ··· 61
표 1-2 ORT 및 WinProp를 이용한 해석 결과와 측정 결과의 비교 ··· 67
표 1-3 WinProp를 이용한 회절 유무에 따른 해석 및 측정 결과의 비교 ··· 68
표 1-4 LPWA 통신기술의 종류 및 특징 ··· 74
표 1-5 LoRa RF moudle Lift time 예측 결과 ··· 84
표 2-1 안전관리 정보 분류 ··· 87
표 2-2 사고판단을 위한 데이터 분류 ··· 94
표 2-3 JESS 추론엔진에서 제공하는 Fact와 Rule 포멧 ··· 94
표 3-1 광고 패킷 포맷 ··· 120 표 3-2 비콘 광고 패킷 및 정보 패킷 포맷 ··· 121 표 3-3 스캐너 정보 서버 전송 포맷 ··· 121 표 3-4 헬로팩토리 비콘 IB 정보 ··· 123 표 3-5 헬로팩토리 비콘 ET 정보 ··· 123 표 3-6 정확도 계산식 ··· 125 표 3-7 판단 알고리즘 ··· 125 표 3-8 송수신 데이터 유형 ··· 150 표 3-9 DB Table 구성 ··· 152 표 3-10 시스템 요구사항 ··· 158 표 3-11 테스트 항목 및 결과 ··· 159 표 4-1 테스트 별 인식률 ··· 164 표 4-2 필드 타입 정의 ··· 166 표 4-3 패킷 Header 설정 ··· 166 표 4-4 패킷 Data 부분 설정 값 ··· 167 표 4-5 패킷 요청 부분 ··· 167 표 4-6 패킷 응답 부분 ··· 168 표 4-7 설정 파일 목록 ··· 169 표 4-8 Match.txt파일 상세 ··· 169 표 4-9 adjacency.txt 파일 상세 ··· 169 표 4-10 ReaderInfo.txt 파일 상세 ··· 169 표 4-11 비콘Info.txt 파일 상세 ··· 170 표 4-12 Management 프로그램 목록 ··· 174
표 5-1 승강기 고장진단 센서 NMEA 포맷 정의 ··· 196 표 6-1 ICT 관련 7개 세부기술에 해당되는 한국표준산업분류 중 57개 분류코드 ··· 212 표 6-2 전문가 자문을 통해 정제된 한국표준산업분류 20개 분류코드 ··· 213
그림 목차
그림 1-1 해양플랜트 전파환경 (왼쪽: 실외) (오른쪽: 실내) ··· 50 그림 1-2 해양플랜트 전파환경 ··· 50 그림 1-3 광선추적 모델 ··· 51 그림 1-4 광선추적법을 이용한 실내 전파환경 해석 ··· 52 그림 1-5 임의의 구조의 다면체 및 원기둥에 대한 삼각형 조합 구성 ··· 53 그림 1-6 삼각형 조합으로 근사한 해양플랜트 모델 ··· 53 그림 1-7 송신점으로부터의 반사튜브 생성 예 ··· 54 그림 1-8 반사튜브의 자식으로서 반사튜브를 생성한 예 ··· 55 그림 1-9 트리 구조와 역방향 광선추적을 이용한 전파경로 찾기 ··· 56 그림 1-10 역방향 광선추적으로 찾은 반사점이 해당 삼각형에 없는 경우 ··· 57 그림 1-11 송·수신점과 반사점 및 반사점들 사이의 투과점 찾기 ··· 57 그림 1-12 해석 영역의 3차원 셀 분할 (평면도) ··· 59 그림 1-13 반사튜브 내부에 포함된 삼각형 찾기 ··· 59 그림 1-14 선분과 교차하는 삼각형 찾기 ··· 59 그림 1-15 ORT 절차도 ··· 62 그림 1-16 ORT의 메인 화면 (해양플랜트 데이터 입력 시) ··· 62 그림 1-17 ETRI 12동(4층)내 송신점 위치와 해석 경로 ··· 64 그림 1-18 Tx-1에 대한 Route-1에서의 해석 결과와 측정 결과 ··· 65 그림 1-19 Tx-1에 대한 Route-2에서의 해석 결과와 측정 결과 ··· 65 그림 1-20 Tx-2에 대한 Route-3에서의 해석 결과와 측정 결과 ··· 66 그림 1-21 Tx-2에 대한 Route-4에서의 해석 결과와 측정 결과 ··· 66 그림 1-22 Tx-2에 대한 Route-5에서의 해석 결과와 측정 결과 ··· 66그림 1-23 Route-1, Route-3에서의 회절 유무에 따른 결과 (WinProp) ··· 67
그림 1-24 해양플랜트 모델에서 송신점의 위치와 해석 경로 ··· 68 그림 1-25 Tx-1에 대한 Route-1에서의 해석 결과 ··· 69 그림 1-26 Tx-1에 대한 Route-2에서의 해석 결과 ··· 69 그림 1-27 Tx-1에 대한 Route-3에서의 해석 결과 ··· 69 그림 1-28 Tx-1에 대한 Route-4에서의 해석 결과 ··· 70 그림 1-29 Tx-1에 대한 Route-5에서의 해석 결과 ··· 70 그림 1-30 Tx-2에 대한 Route-6에서의 해석 결과 ··· 70
그림 1-31 Tx-2에 대한 Route-7에서의 해석 결과 ··· 71 그림 1-32 Tx-2에 대한 Route-8에서의 해석 결과 ··· 71 그림 1-33 LPWA 통신 기술의 요구사항 ··· 73 그림 1-34 통신 기술 별 전송률 및 커버리지 ··· 73 그림 1-35 LoRa 네트워크 구조 ··· 76 그림 1-36 LoRa의 ADR ··· 76 그림 1-37 LoRa 모듈의 구성 ··· 78
그림 1-38 LoRa modul 명령어 block ··· 78
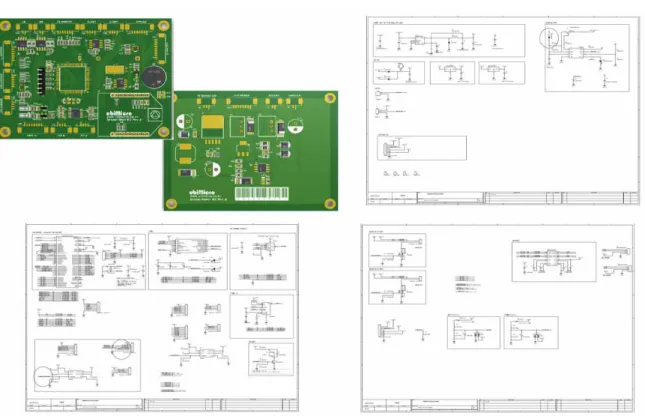
그림 1-39 PCB 설계도면 ··· 79
그림 1-40 LoRa RF Module ··· 79
그림 1-41 Sensor Evaluation kit의 구성 ··· 80
그림 1-42 Sensor Evaluation kit의 Main board 설계도면 ··· 81
그림 1-43 Sensor Evaluation kit의 Sensor board 설계도면 ··· 81
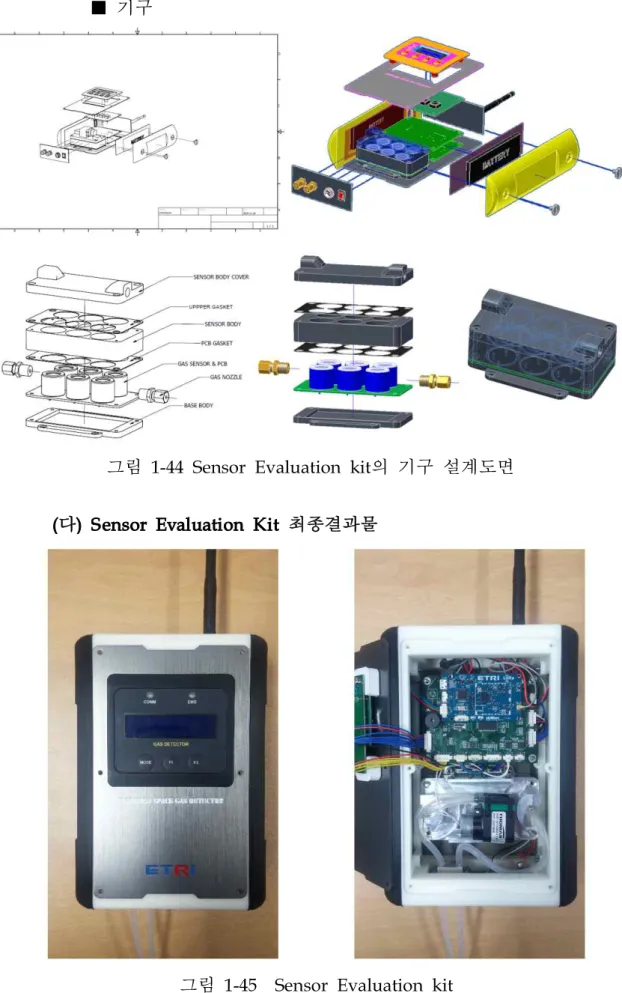
그림 1-44 Sensor Evaluation kit의 기구 설계도면 ··· 82
그림 1-45 Sensor Evaluation kit ··· 82
그림 1-46 LoRa RF Module 통신 거리 테스트 장소(10Km, LOS) ··· 83
그림 2-1 안전관리 정보 표현 서브시스템 구조 ··· 88 그림 2-2 안전관리 정보 연동 서비스의 주요 클래스 ··· 89 그림 2-3 사고판단 시스템 구조 ··· 93 그림 2-4 프로젝트 관리 기능 ··· 95 그림 2-5 작업장 관리 기능 ··· 96 그림 2-6 구역목록 관리 기능 ··· 97 그림 2-7 구역맵핑 기능 ··· 97 그림 2-8 공정목록관리 기능 ··· 98 그림 2-9 공정 맵핑 기능 ··· 98 그림 2-10 작업자목록관리 기능 ··· 99 그림 2-11 프로젝트 모니터링 기능 ··· 100 그림 2-12 개별 작업장 모니터링 기능 ··· 100 그림 3-1 DW-1000 S/W 구성 ··· 102 그림 3-2 State machine S/W 분석도 ··· 103 그림 3-3 프로그램 수행 순서도 ··· 104 그림 3-4 UWB 태그 회로도 ··· 105 그림 3-5 (a) MAC 포맷, (b) 제어필드 포맷 ··· 105
그림 3-6 POLL 메시지 구성 ··· 106 그림 3-7 RESPONSE 메시지 구성 ··· 107 그림 3-8 FINAL 메시지 구성 ··· 107 그림 3-9 TOSS 메시지 구성 ··· 108 그림 3-10 Superframe과 slot 시간 구성 ··· 109 그림 3-11 메시지 송수신 절차와 TOSS ··· 110 그림 3-12 HOST-측위 시스템 프로토콜 ··· 111 그림 3-13 Anchor 응용의 상태도 ··· 112 그림 3-14 새로운 태그 등장으로 인한 superframe 및 slot 시작지점 추정 ··· 114 그림 3-15 Tag 모드 수행 상태도 ··· 115 그림 3-16 작업장 개념도 ··· 118 그림 3-17 시스템 구성 컴포넌트 ··· 119 그림 3-18 정보 생성 서브시스템 ··· 122 그림 3-19 정보 처리 서브시스템 ··· 122 그림 3-20 IoT 기반 안전모 구성 ··· 128 그림 3-21 개발된 비콘 태그 ··· 129 그림 3-22 비콘 태그 배터리 소모 시간 ··· 129 그림 3-23 Payload 구성 ··· 130 그림 3-24 가스 센서 장착 보드 ··· 131 그림 3-25 신호 수신기와 보드 ··· 132 그림 3-26 경광등/사이렌 장치 ··· 132 그림 3-27 수신 비콘 분석 화면 ··· 133 그림 3-34 통신모듈을 통한 안전보호구 착용인식 구성도 ··· 136 그림 3-35 실시간 작업자 안전 모니터링 시스템 구성 ··· 137
그림 3-36 Data Flow Diagram ··· 146
그림 3-37 MSG Server GUI 화면 ··· 147 그림 3-38 모니터링 클라이언트 ··· 148 그림 3-39 PPP 전송 주기 설정 UI ··· 149 그림 3-40 PPP 제어 설정 UI ··· 149 그림 3-41 작업장 안전장구 착용 규칙 설정 UI ··· 150 그림 3-42 Protocol Procedure ··· 151 그림 3-43 Message Definition ··· 151 그림 3-44 테스트 환경 구성 ··· 157
그림 4-1 스마트 게이트 시스템 개념도 ··· 161 그림 4-2 스마트 게이트 구조 ··· 162 그림 4-3 인가 비인가 여부 ··· 162 그림 4-4 메인함체 구성도 ··· 163 그림 4-5 시험 환경 구성 ··· 164 그림 4-6 미들웨어 정보 수신처리 로직 ··· 171 그림 4-7 공사/모듈/데크/구역 정보 테이블 ··· 172 그림 4-8 출입정보 및 출입이력 테이블 ··· 172 그림 4-9 출입정보 및 출입이력 테이블 ··· 173 그림 4-10 출입 쌍이력 테이블 ··· 173 그림 4-11 공사 관리 화면 ··· 175 그림 4-12 장기 미선화 현황 화면 ··· 176 그림 4-13 지정시간 승선인원 현황 ··· 176 그림 4-14 부서별 체류시간 기준 인원 현황 정보 화면 ··· 177 그림 4-15 맨파워 집계화면 구성 ··· 178 그림 4-16 시간대별 승선인원 추이 화면 ··· 178 그림 4-17 승하선 인원 상세 현황 화면 ··· 179 그림 5-1 무선통신제어반 원격 모니터링 시스템 구성도 ··· 182 그림 5-2 구현되어진 무선통신제어반 ··· 183 그림 5-3 층 제어기(Main Controller) ··· 184 그림 5-4 주 제어기(Main Controller) 소스 코드 ··· 185 그림 5-5 카 제어기(Main Controller) 보드 설계 ··· 186 그림 5-6 카 제어기(Main Controller) 소스 코드 ··· 186 그림 5-7 무선통신제어반 시스템 기능 설정 ··· 193 그림 5-8 승강기 고장진단 센서 모델링 ··· 197 그림 5-9 승강기 고장진단 센서 부착 위치 모델링 ··· 197 그림 5-10 승강기 고장진단 센서 부착 위치 모델링 & 센서 부착 ··· 198 그림 5-11 실제 테스트베드 승강기 고장진단 센서 부착 ··· 200 그림 5-12 c++ 개발 환경 ··· 201 그림 5-13 승강기 모니터링 S/W 프로세스 처리 루틴 ··· 202 그림 5-14 승강기 모니터링 S/W 프로세스 처리 루틴 ··· 202 그림 5-15 QR 타입 인식 보정 알고리즘(1) ··· 204 그림 5-16 QR 타입 인식 보정 알고리즘(1) ··· 205
그림 5-17 회전에 따른 QR 타입 인식 보정 알고리즘(1) ··· 205 그림 5-18 QR 타입 – 승강기 부품 1:1 매핑 ··· 206 그림 5-19 부품 모델링을 통한 부품 세부 정보 제공 ··· 206 그림 5-20 승강기 고장진단 솔루션(영어버전) ··· 207 그림 5-21 승강기 고장진단 솔루션(한글버전) ··· 207 그림 5-22 승강기 군집 관리 기능 ··· 208 그림 5-23 고장진단에 따른 승강기 알람 기능 ··· 208 그림 5-24 주관기관 개발 제품 설치 및 테스트베드 환경 구축 ··· 210 그림 6-1 울산과학기술진흥센터 개소식에서 한국전자통신연구원 연구성과발표 ··· 215 그림 6-2 울산테크노파크와 한국전자통신연구원 공동협력 양해각서 체결 ··· 216
Ⅰ. 해당 연도 추진 현황
Ⅰ-1 당해연도 개발 목표 및 개발 내용
1. 연구목표의 달성도
일련 번호 목표 개발 내용(12개월) 달성도 (%) 1 2 3 4 5 6 7 8 9 10 11 12 1 해양플랜트 환경 적응형 유무선 통신 최적화 기술 개발 100 % 2 해양플랜트 사고 판단 및 대응 기술 개발 100 % 3 스마트 안전 장구 기술 개발 100 % 4 스마트 게이트 기술 개발 100 % 당초계획 개발내용 선박/플랜트 구조물 모델링 기법 개발 광선추적 알고리즘 개발 통신 및 센서망 배치 시뮬레이션 도구 개발 사고예측 SW 개발 작업자 위치 정보 관리 3D 맵 기반 작업장 안전도 분석 SW 개발 안전관리 정보표현 밀폐구역 환경정보 모니터링 시스템 개발 작업자용 스마트 안전장구 시작품 개발 작업자 위치 인식용 센싱 모듈 개발 개인별 IoT 안전모 개발 IoT기반 작업자 출입인식 스마트 게이트웨이 개발 미들웨어 및 관리 프로그램 고도화 비콘 신호 수신기 및 경광등2. 연구목표 수준의 타당성
육상플랜트 및 해양플랜트에서의 작업자 안전관리를 위해 반드시 달성해야 할 연구목표를 크게 4가지 항목으로 나누었으며, 각각의 목표를 달성하기 위한 세부 연구내용을 아래와 같이 분류하여 연구를 수행하였으며, 각각의 세부목표의 필요성 및 타당성을 기술하였다. 가. 비전 및 목표 나. 세부목표에 대한 연구 타당성 연구목표 세부연구내용 연구 필요성 및 타당성 해양플랜트 환경 적응형 유무선 통신 최적화 기술 개발 선박/플랜트 구조물 모델링 기법 개발 Ÿ 건조중인 선박이나 해양플랜트의 설계도는 선주사의 극비문서로서, 선박건조의 주체인 조선사에서도 제한적으로 활용 Ÿ HSE 모니터링을 위해서 작업공정 별로 변경되는 환경에 맞춰 관리 대상이나 관리 목표치가 변경되며 전파환경도 변하게 됨 Ÿ 변경된 전파환경을 즉각적으로 반 영하기 위해 구조물에 대해 전파 환경 분석에 적합하도록 유효 데 이터만을 추출하여 모델링할 필요가 있음 광선추적 알고리즘 개발 Ÿ 전파분석 및 전파환경 시뮬레이션을 통해, 구조물이나 작업환경이 수시로 변하는 작업공간에서 최적의 무선통신 중계장치의 위치를 결정함으 로써 간섭량을 줄일 수 있고, 무선 통신 구축 비용을 절감 통신 및 센서망 배치 시뮬레이션 도구 개발 Ÿ 광선추적 알고리즘을 기반으로 최적의 무선 중계장치를 배치하기 위한 도구로서 비용과 안정성 측 면을 모두 고려할 때 반드시 필요한 SW임 해양플랜트 사고 판단 및 대응 기술 개발 작업자 위치 정보 관리 Ÿ 작업자의 위치는 작업자의 사고예 측을 위해 반드시 필요한 정보로서 HSE 시스템 구축에 매우 중요한 위치를 차지함 사고예측 SW 개발 Ÿ 기존 모니터링 시스템에서는 적용 되지 않은 기술요소로서 작업자에게 발생될 수 있는 사고를 사전에 예측 해주는 모니터링 핵심기술임 3D 맵 기반 작업장 안전도 분석 SW 개발 Ÿ 이 기능은 각 작업장의 구역에 대한 안전정보 및 작업장 환경정보를 기반으로 사고예측 기능을 활용하여 3D 맵에 시각적으로 위험구역을 보여주는 기능임 Ÿ 관리자가 전체 작업장을 쉽게 모 니터링 할 수 있는 UI를 제공함 안전관리 정보표현 Ÿ 각 작업장의 모든 작업구역에 대해 해당 구역이 포함하고 있는 안전에 관련된 정보를 관리하기 위한 기 능으로 안전도 분석을 위한 필수 요건임 밀폐구역 환경정보 모니터링 시스템 개발 Ÿ 밀폐구역을 포함한 작업장 전반에 대해 인체에 유해한 환경물질을 검출할 수 있는 센서를 개발하여 모니터링 시스템과 연계하기 위한 기술임 스마트 안전 장구 기술 개발 작업자 위치 인식용 센싱 모듈 개발 Ÿ 선박 및 플랜트 작업장의 경우, 다 수의 철골구조물로 인한 잦은 신 호세기 변화 및 멀티패스 등으로 일반적인 지문 인식법을 활용한 위치 측위 기술 적용이 쉽지 않음 Ÿ 이에 멀티패스 신호에 강인한 IR-UWB를 기반으로 한 작업자 위치 인식 기술 개발이 필요 작업자용 스마트 안전장구 시작품 개발 - 비콘 기반 스마트 안전장구 SW 기술 개발 Ÿ 비정형 광역 작업장에서 헬멧에 장치를 부착하지 않고 작업자의 심볼릭 로케이션 파악 필요. 존재 여부를 알리는 비콘 기술을 이용 함으로써 소형, 경량화 장치를 통한 위치 정보 파악 용이. 개인별 IoT 안전모 개발 Ÿ 헬멧에 가스 센서, 비콘, LED 표시 장치를 부착하여 주위의 작업자에게 알리고, 자신의 위험을 비콘 버튼을 통해 서버에 알릴 필요가 있음.
Ÿ 비콘 버튼을 통해 위험을 알리고 경광등을 통해 표시해 주는 위험 알림 기능으로 타당성이 있음 스마트 게이트 기술 개발 IoT기반 작업자 출입인식 스마트 게이트웨이 개발 Ÿ 작업자의 출입인식을 RFID와 비콘 테그를 모두 이용할 수 있는 안테 나가 포함된 일체형 게이트웨이와 차단봉 인원의 감지센서, CCTV등을 일체화 해서 각각의 모듈을 설치 및 동기화작업을 최소화 할 수 있는 게이트 개발이 필요 Ÿ 작업자의 작업장 출입 여부를 파 악하여 안전관리를 위해 반드시 필요함 스마트 게이트웨어 지원용 미들웨어 및 관리 프로그램 고도화 Ÿ 인식장치의 다양화와 작업자의 위 치를 게이트 구분만이 아닌 모듈, 데크, 구역을 세분화하여 관리하고 통계를 위한 기초 데이터로 활용 하기 위하여 고도화 할 필요 비콘 신호 수신기 및 경광등 Ÿ 기존 RFID 인식 장치에서 고도화 하여 구역별로 작업자의 위치를 인식할 수 있는 수신기에 센서에서 수집된 정보를 주위 작업자에 시각 /청각적 전파가 가능한 일체형 장 치를 연구하여 작업자의 안전을 지원 할 수 있는 작업환경을 구축 할 필요가 있음
3. 수행체계 및 전년도 평가결과 조치사항
가. 연구개발 수행체계 1) 연구체계 ∎ 스마트 HSE 시스템은 크게 복합 구조물에서의 통신, 스마트 HSE 플랫폼, 작업자용 안전장구 및 스마트 게이트로 구성되며, 아래와 같이 역할분담이 이루어짐 ∎ 통신 및 플랫폼 분야에서의 핵심기술은 ETRI에서 담당하고, 안전장구, 스마 트게이트 및 현장환경 분석용 센서 등의 제품 개발은 참여기관의 역할로 업무 분담이 이루어짐2) 참여기관의 세부업무 ∎ ETRI는 통신 및 HSE 플랫폼의 핵심기술 등을 개발하며, 일부 내용은 참여 기관과 업무를 공유함 ∎ 참여기관은 현장에서의 데이터 취득과 관련된 연구개발이 주된 역할로서 작업자 상태 및 작업장의 환경정보를 얻기 위한 안전장구 및 센서 개발 등 제품 위주의 업무를 수행함
나. 전년도 평가결과 조치사항 평가의견 수행계획서 수정·보완사항 관련 페이지 -개발 결과물이 명확하지 않음 -원천기술 확보 등이 미미함 - 스마트 HSE 시스템의 구성요소 인 유무선 최적화 통신 기술, 사 고판단 및 대응 기술, 스마트 안 전 장구 및 스마트 게이트를 세 부 목표로 설정하고 각각에 대 해 연차별 개발결과물을 제시함 - 기술의 원천성을 위해 기술이전 항목을 설정하고 개발가능한 원 천기술을 도출함 - 선박/플랜트 전파 환경 모델링을 위한 광선추적 알고리듬 개발 및 시험 - USB방식 릴레이 통신 알고리듬 및 모듈 개발 수행계획서 p.23~24, P.50 -연구성과의 명확성이 부족함 -정량적 성과지표의 구체화 - 스마트 HSE 시스템의 구성요소 인 유무선 최적화 통신 기술, 사 고판단 및 대응 기술, 스마트 안 전 장구 및 스마트 게이트를 세 부 목표로 설정하고 각각에 대 해 연차별 개발결과물을 제시함 - 정량적 성과항목을 세부기술별 로 세분화 하고 아래와 같이 구 체적으로 제시함 수행계획서 p.1, P.23~24, P.36
성과지표 (주요성능 Spec) 기술개발 목표치(‘16) 전파환경 시뮬레이션 도구 적용 대상 선박 이동 객체의 작업구역 위치 정합율(작업장 도면기준) 80% 작업자 사고 판단 오류 20% 동시 관제 작업자 수 (1 sec 이내) 500명 이상 처리 가능한 사고 유형수 2개 이상 게이트 입출입 식별 정확도 95% (2,000명 기준) -통신 음영지역에 대한 대처 필요 -기존 기술과의 차별성,원 천성 필요 - 복합구조물에서의 통신 및 센서 망 배치 시뮬레이션 도구를 통 해 AP의 최적 배치를 통해 음영 지역을 최소화 하고자 함 - UWB 릴레이 통신 알고리즘 및 시작품 개발 완료 - IoT 기간 통신망인 LoRa 통신 모듈 개발 완료 및 통달 거리 시험 - 선박/플랜트 전파 환경 모델링을 위한 광선추적 알고리듬 개발 및 상용툴과 결과 비교 수행계획서 p.27 -목표의 범위 명확화(사고 규모/유형) -연차별 연구목표의 정량화 - 연구목표를 구체화 하기 위해 사 고 유형을 분석하여 빈도가 높은 사고 위주로 기술개발 추진함. 이 를 최종 목표에 대상 사고를 기 입함 - 정량적 성과항목을 세부기술별 로 세분화 하고 아래와 같이 구 체적으로 제시함 수행계획서 P.22, P.36
성과지표 (주요성능 Spec) 기술개발 목표치(‘16) 전파환경 시뮬레이션 도구 적용 대상 선박 이동 객체의 작업구역 위치 정합율(작업장 도면기준) 80% 작업자 사고 판단 오류 20% 동시 관제 작업자 수 (1 sec 이내) 500명 이상 처리 가능한 사고 유형수 2개 이상 게이트 입출입 식별 정확도 95% (2,000명 기준) -정량적 성과지표의 구체화 -정량적 성과항목을 세부기술별로 세분화 하고 아래와 같이 구체적 으로 제시함 성과지표 (주요성능 Spec) 기술개발 목표치(‘16) 전파환경 시뮬레이션 도구 적용 대상 선박 이동 객체의 작업구역 위치 정합율(작업장 도면기준) 80% 작업자 사고 판단 오류 20% 동시 관제 작업자 수 (1 sec 이내) 500명 이상 처리 가능한 사고 유형수 2개 이상 게이트 입출입 식별 정확도 95% (2,000명 기준) 수행계획서 p.1, P.36 -연차별 정량적 성과지표 제시 -정량적 성과항목을 세부기술별로 세분화 하고 아래와 같이 구체적 으로 제시함 성과지표 (주요성능 Spec) 기술개발 목표치(‘16) 전파환경 시뮬레이션 도구 적용 대상 선박 이동 객체의 작업구역 위치 정합율(작업장 도면기준) 80% 작업자 사고 판단 오류 20% 동시 관제 작업자 수 (1 sec 이내) 500명 이상 처리 가능한 사고 유형수 2개 이상 게이트 입출입 식별 정확도 (2,000명 기준)95% 수행계획서 p.1, P.36
Ⅰ-2 당해년도 추진 실적
1. 국내외 기술동향 및 기술수준 요약
가. 해양플랜트 환경 적응형 유무선 통신 최적화 기술 개발 (기술 동향) Ÿ 조선소 또는 건설현장과 같이 주변 구조물 등이 다양한 형태로 놓여있는 산업 현장에서는 전파환경을 측정하기 위해 몸에 짊어지고 측정해야 하므로 경량 으로 이동이 용이하면서 조작이 간편한 측정장비가 요구됨Ÿ Berkeley 사의 dual-band lizard transmitter는 경량으로 690 ~ 2,700 MHz 주파수 대역에서 2개의 신호를 동시에 송신 가능하고, 2개의 독립적인 1 W 송신모듈을 가지고 있으며, 각각의 송신주파수는 주파수합성기를 사용하여 동적으로 제어가능함. 출력은 0 ~ 30 dBm 까지 0.1 dB의 해상도로 조정 가능함
Ÿ Berkeley 사의 Indoor Forecaster 는 두 개의 독립적인 수신 신호 강도(RSSI)를 측정할 수 있는 고속 수신기로, GPS 수신기가 내장되어 실외에서도 사용 가능하며, Wi-MAX, Cellular, GSM, LMR, PCS, ISM, WCS, ETACS 등의 주 파수 밴드를 지원하고, 이중 수신 모듈을 이용하여 2개의 주파수 밴드를 동 시에 스캔할 수 있음
Ÿ Keysight 사의 5G Channel Sounder 는 광대역 digitizer, 마이크로파 down converter, 신호발생기 등으로 구성되어 있어, 지연프로파일과 도래각(angle of arrival) 등의 정확한 측정을 위해 입출력 제어 소프트웨어 및 교정 지침을 제공하고, 송수신기의 정밀한 동기화를 지원한다. 채널임펄스응답의 실시간 측정을 지원하며, 최대 44 GHz까지 측정이 가능함
Ÿ Rohde & Schwarz 사의 5G 채널사운더는 SMW200A 벡터 신호발생기와 FSW 신호 및 스펙트럼분석기, 응용 소프트웨어로 구성되며, 벡터 신호발생 기는 최대 500 MHz의 넓은 신호 대역폭과 40 GHz 캐리어 주파수를 제공함 Ÿ 선박이나 해양플랜트 건조현장은 내·외부 상세 구조, 작업장 내부 설비 등에
의하여 전파 환경이 크게 영향을 받으므로, 경로손실 및 지연확산과 같은 작업장 내·외부 전파 환경에 대한 정확한 예측이 요구됨
Ÿ 현재 site-specific 전파예측모델로는 UTD(Uniform Geometrical Theory of Diffraction)에 바탕을 둔 광선 추적(ray tracing) 모델이 가장 우수성을 인정 받고 있으며, 특히 세부적으로 광선 발사법(ray launching method)과 전기 영상법(image method)이 사용되고 있음
Ÿ 광선 발사법은 송신 안테나로부터 등간격으로 다수의 광선(ray)을 발사한 뒤 각각의 광선을 추적하여 수신점에 도달하는 광선을 찾는 방법으로, 임의의 산란 구조에 대하여 해석이 가능하다는 장점이 있으나, 수신 안테나에 도달 하는 광선뿐만 아니라 도달하지 않는 광선들도 모두 검색해야 하므로, 상당히 많은 해석 시간이 요구되며, 수신 시험(reception test)의 부정확성으로 인하여 해석 결과의 정확도도 상당히 떨어지는 단점이 있음 Ÿ 전기영상법을 이용한 광선추적법은 점대점(point-to-point) 광선추적법의 하 나로서 수신시험을 필요로 하지 않고, 정확한 반사점과 회절점을 제공하므로 해석결과가 상당히 정확하며, 해석속도도 상당히 빠른 장점이 있으나, 전기 영상을 생성하는 산란체의 결정이 어려워서 복잡한 산란구조에 대한 해석에는 부적합하다는 단점이 있음 Ÿ 독일 AWE-COM 사의 WinProp는 1990년대부터 상용화된 실내 전파예측 프로그램으로, 2.5G, 3G, WiMax, WLAN 의 주파수 대에서 사용 가능하고, Empirical Models (Direct Ray) 및 Deterministic Models (Path Searching) 등의 예측모델을 지원함. 2D Maps, 위치별 Diagrams, 통계자료를 제공하며 Graphical 빌딩 데이터베이스의 편집이 가능
Ÿ 미국 EDX Wireless 사의 Advanced Propagation Module는 최근 많이 사용 되는 전파예측 프로그램으로, 저비용으로 고정밀 site-specific wireless propagation 계산이 가능하며, LTE, WiMAX, WiFi, DAS 및 기타 무선통신 시스템에 적용 가능.
Ÿ 2D ray-tracing, 3D indoor ray-tracing, 3D outdoor ray-tracing 모델을 지원 하고 pathloss, RMS delay/angular spread, Individual 3D ray trajectories 출력이 가능
(기술 수준)
Ÿ Site-specific 전파예측모델로는 UTD(Uniform Geometrical Theory of Diffraction)에 바탕을 둔 광선 추적(ray tracing) 모델이 가장 우수성을 인정 받고 있으며, 특히 세부적으로 광선 발사법(ray launching method)과 전기 영상법(image method)이 사용되고 있음 Ÿ 광선 발사법은 송신 안테나로부터 등간격으로 다수의 광선(ray)을 발사한 뒤 각각의 광선을 추적하여 수신점에 도달하는 광선을 찾는 방법으로, 임의의 산란 구조에 대하여 해석이 가능하다는 장점이 있으나, 수신 안테나에 도달 하는 광선뿐만 아니라 도달하지 않는 광선들도 모두 검색해야 하므로, 상당히 많은 해석 시간이 요구되며, 수신 시험(reception test)의 부정확성으로 인하여 해석 결과의 정확도도 상당히 떨어지는 단점이 있음
Ÿ 전기영상법을 이용한 광선추적법은 점대점(point-to-point) 광선추적법의 하 나로서 수신시험을 필요로 하지 않고, 정확한 반사점과 회절점을 제공하므로 해석결과가 상당히 정확하며, 해석속도도 상당히 빠른 장점이 있으나, 전기 영상을 생성하는 산란체의 결정이 어려워서 복잡한 산란구조에 대한 해석에는 부적합하다는 단점이 있음 나. 해양/플랜트 사고 판단 및 대응 기술 개발 (기술 동향)
Ÿ EHS 관리 소프트웨어로는 Integrum Management Systems의 Integrum QHSE Risk & Compliance, Plan Brother사의 Incy.io, Optial사의 EHS SmartStart, DNV GL사의 Synergi Life, SAP의 EHS Management 어플리케 이션 등이 사용되고 있음
Ÿ 작업장에서의 사고(Incident) 관리를 위한 상용 SW 제품인 SAP의 Environment, Health, and Safety Management 어플리케이션은 사고에 대한 초기 기록, 사고 처리 과정 추적 관리, 사고 원인 및 위험 평가, 사고 보고 (reporting)을 포함한 사고 관리 전체 프로세스를 지원함 Ÿ JSEAsy사에서는 영역별 작업 건강과 안전 규정, 직무와 책임, 필요 자격증, 사용할 장비 등 목록을 관리하고 작업시 작업을 생성, 작업할 위치 입력, 작업 탬플릿을 선택하면 세부 작업, 잠재적 위험(Hazard)등을 확인한 후 적합한 개인보호장구를 선택하도록 하는 과정을 거치도록 하는 소프트웨어 패키지를 판매중 Ÿ HCSAFETY사에서는 작업자 위치 추적과 사고여부 판별을 위한 정보를 제공 하는 Smart Vest(안전조끼)을 개발중이며 취합된 정보를 BIM과 연동하여 작업장의 작업자, 자재, 환경 등을 추적가능 하도록 하는 시스템을 개발중 Ÿ 노르웨이의 석유회사인 Statoil(스타토일)에서는 “New Energy and HSE” 라는
R&D 프로그램의 일환으로 2011년부터 3년간 2천 5백만 달러 프로젝트를 통해 콩스버그, IBM, DNV 등이 참여하여 실시간 통합 환경 모니터링 시스 템을 개발함
Ÿ 영국의 석유회사인 BP에서도 Well Advisor라는 프로그램의 HSE 프로젝트를 2011년부터 진행하여, 콩스버그와 협력하여 유정 건설 전체 라이프사이클에서 의사 결정을 지원하는 실시간 데이터 분석 및 모니터링 시스템을 개발함 Ÿ Verdantix사의 'EH&S Software: Global Market Size And Forecast
2016-2020' 보고서에 따르면, EHS 소프트웨어 시장은 2016년 9.30억 달러에서 2020년 14.1억 달러로 매년 11%씩 증가할 것이라고 예측하고 있음(2016.7월 발표)
Ÿ 2016년 전체 시장에서 북미 시장은 4.93억 달러로 전체 시장 규모의 58% 이 상을 차치하고 있으며, 유럽 시장은 2.52억 달러로 30%를 차지하고 있음 Ÿ Lux Research사에서 2013년에 발표된 보고서인 "Using Technology to
Drive Improvements in Health, Safety, and Environment"에 따르면, 육상 및 해양 석유 가스 분야 기업들은 각종 규제에 대처하기 위한 HSE에 대한 투자로, 전체 시장 규모가 2035년 560억 달러까지 성장할 것이라고 전망하고 있음 Ÿ GS건설은 도면 수정, 변경 사항 등을 실시간으로 공유하고 공사문서 저장, 사진 전송등 가능한 플랜그리드(Plan Grid) 도입 Ÿ 에스원은 산업재해 예방을 위해 영상을 통해 작업자 상태, 위험물질 취급 상태 등 모니터링 가능한 3차원 영상 분석 솔루션 에스원 SVMS 개발 (기술 수준) Ÿ 상기 기술현황을 분석해 보면, HSE와 연관된 모니터링 기술이나 사고관리 등 전반적으로 활발한 연구가 진행되고 있지만 사고가 발생되는 요인을 사전에 작업자에게 고지하여 필요한 안전장구를 착용하도록 하는 안전수칙 교육적 측면이 많음 Ÿ 현장에서의 데이터 취득을 통해 사고 가능성을 실시간으로 예측하는 기술은 현재로서는 기술동향이 없는 상황으로서 본 과제에서 추진하는 스마트 HSE 시스템의 경우 기술적 가치가 있는 것으로 판단됨 다. 스마트 안전장구 기술 개발 (기술 동향) Ÿ Dinolens사는 ICT 기술을 활용한 상비용 헬멧 및 재난대비용 경량화 헬멧을 출시, 넥시스사는 다양한 센서를 활용한 LTE기반 안전 웨어러블 헬프웨어 헬멧을 출시 Ÿ LG 유플러스에서는 LTE모뎀, 카메라, 무전 기능, GPS 등을 탐재하여 실시간 영상 및 음성 통신이 가능하고 실시간 위치, 이동경로 등 모니터링이 가능한 산업안전 IoT솔류션으로 IoT 헬멧 출시 Ÿ Tanizawa사 작업자와 관리자에게 현장의 영상, 음성, 위치, 경보 등의 모든 정보를 실시간으로 전송할 수 있는 올인원 헬멧 출시 Ÿ Gigatera 사에서는 무전기능, LED조명, 충격 및 낙하 감지, 비콘 기능 등이 탑재된 산업현장용 스마트 헬멧 출시 Ÿ Illumagear사는 야간에 작업자 주변을 비추어줄 수 있는 빛을 발하는 Halo Light 헬멧을 판매 중임
Ÿ Honeywell사에서는 산업현장에서 작업자가 휴대 가능한 위치 인식과 양방향 통신이 가능한 가스 검출기 계획 중임
Ÿ DAQRI사는 객체인식, 환경 매핑, 설비의 3D 모델링 등을 지원하는 고해상도 3D depth 센서와 360도 네비게이션 카메라를 장착한 4D 스마트 헬멧 시판 중 Ÿ BABAALI사에서는 심박수, 체온, 혈압등 측정 센서, LTE 모뎀, 카메라, LED
전등, 음성통신장치 등을 장착한 스마트 건설 헬멧 판매 중
Ÿ HCSAFETY사에서는 작업자 위치 추적과 사고여부 판별을 위한 정보를 제 공하는 Smart Vest(안전조끼)을 개발 중이며, 취합된 정보를 BIM과 연동하여 작업장의 작업자, 자재, 환경 등을 추적가능 하도록 하는 시스템을 개발 중 Ÿ 한국도로공사는 안전모에 소형 캠코더를 장착해 고속도로 건설현장을 모니 터링하는 위험작업장 원격안전관제 시스템 도입 Ÿ 인프라칩사에서는 온습도, 충격, 화재, 진동 등 위험을 감지하는 다양한 센 서가 내장된 재난안전용 스마트비콘 시스템을 개발 Ÿ 대우건설과 SK텔레콤은 안전태그기반 위치 측정 및 구조신호 송출 장치를 개발 스마트 건설 기술에 활용 Ÿ 실내 작업자 위치 측위 기술은 전 세계적으로 다양한 기술들이 나오고 있지만 아직 뚜렷한 절대 강자가 없다고 볼 수 있으며, IR-UWB 기술은 전파의 투 과성이 좋고 실내 환경에 강건하며, 수십 센티미터 급의 고정밀 측위가 가 능하다는 장점으로 Decawave 칩셋을 기반으로 Eliko, OpenRTLS, Ubisense 등에서 제품화하고 있음 Ÿ 현재 IR-UWB 기술은 대규모 작업장에 기술을 적용하여 상용화 가능성을 추진해보는 단계로 보여지며, 국내의 경우 아라커뮤니케이션즈사의 UWB기반 안전관제 시스템 개발, 포스코사의 UWB/RFID 태그를 활용한 u세이프티 (u-safety)시스템 등의 적용 사례가 다소 있음 (기술 수준) Ÿ 전세계적으로 재난 상황 등의 특수 목적과 건설 현장 등 작업자 모니터링이 필요한 현장에서 ICT 기능이 추가된 헬멧을 시범 적용 단계에 있으며, 조선 소나 플랜트 현장과 같이 광역, 고위험 작업장에서는 기술 검증이 되지 않은 상황임 Ÿ 마케팅에 활용이 예상되던 비콘 기술을 광영, 고위험 작업장의 작업자의 착 용구에 부착하여 위험 상항을 모니터링하거나, 위험 신호를 송출하는 기술을 적용 시험 중에 있음
라. 스마트 게이트 기술 개발 (기술 동향)
Ÿ S3 ID사의 Active RFID Transponder 태그 기반 전자 직원 등록 시스템 (Electronic Personnel Registration System, PRS)가 Statoil사를 포함한 20여 개의 Offshore Plant에서 적용되어 사용 중
Ÿ 중국 Qinshan 원자력발전소에서는 Passive UHF RFID 태그를 이용하여 작 업자의 위치를 추적하고 비상시 작업자 위치 확인, 영역별 출입 확인등 기 능을 적용 중
Ÿ GAO RFID사에서는 터치로 인식하는 단거리 위치 추적용 Passive RFID, UHF를 이용하여 5m까지 인식 가능한 Passive RFID, 100m까지 인식가능한 장거리 위치 추적용 Active RFID를 판매 중 (기술 수준) Ÿ RFID 기반 태그를 사용한 스마트 게이트 기술은 태그 기술의 발달로 해양 플랜트, 조선소 등에서 시범 활용 단계에 있으며, 비콘 기술, UWB 위치 인식 기술 등과의 연동 기술이 시도되고 있는 상황임 Ÿ 우리나라의 경우도 RFID 태그, 위치 알림 비콘, UWB 위치 인식 장치와 연동 되는 기술과 보안 및 안전을 고려한 입출입 기술을 개발 시험 중에 있음
2. 성과지표 달성실적
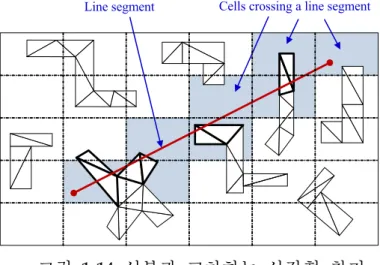
본 절에서는 사업 과정에서 개발된 기술의 수준 및 성능을 확인하기 위하여 아래와 같이 6개의 성과지표를 제시하고 목표를 달성한 근거를 각 항목별로 제시 하였다. 성과 번호 성과지표 (주요성능 Spec) 단위 기술개발 목표치(‘16) 검증방법 달성 수치 달성 여부 1 전파환경 시뮬레이션도구 적용 대상 개 선박 선박/플랜트 작업장 환경에 대 해 상용 SW와 개발 알고리즘 의 결과물 비교 검증 (시험, p16~p22 ) 선박 (해양 플랜트) ○ 유사결과 확인 2 이동 객체의 작업구역위치 정합율 % 80% 실환경 구성후 이동객체 측위 정보를 실 환경맵 위에 도시하여 확인 (시험, p23~p26) 80% ○ 정합률 일치 3 작업자 사고 판단 오류 % 20% 시뮬레이션 기반으로 사고 가능 데이터 입력 후 판단 결과 비교 (시험, p27~p29) 14% ○ 6%의 정확도 향상 4 동시 관제 작업자 수(1 sec 이내) 명 500명 이상 시뮬레이션 기반으로 작업자 수 입력 후 처리속도 확인 (시험, p30~p36) 500명/ 250msec ○ 75% 처리속도 향상 5 처리 가능한 사고유형수 개 2개 이상 시뮬레이션 기반으로 사고 유 형에 따른 사고 발생 후 사고 유형 분류 정확도 확인 (시험, p30~p36) 3개 ○ 초과달성 6 게이트 입출입 식별정확도 % (2,000명 기준)95% 복합구조물에서의 실험에 의한검증(시험, p37~p39) 98.83% 3.8%○ 초과달성 1 전파환경 시뮬레이션 도구 적용 대상 1) 성능시험 방법 Ÿ 선박 및 해양플랜트 건조현장은 선주사가 위임한 감리회사의 출입 및 작업 관리 통제를 받으며, 건조 주체 조선소에서도 계약된 업무 이외의 작업에 대해서 감리회사의 허가를 받아야 하는 한계가 있다. Ÿ 건조중인 해양플랜트 내부에서의 전파측정이 용이하기 않고, 현재 조선소의 선박의 해양플랜트 작업현장에 적용 가능한 상용 시뮬레이터는 없다는 문제 점이 있다.Ÿ 이러한 제약조건하에서, 본 과제에서 개발한 전파환경 시뮬레이터의 성능은 2단계를 통해 수행한다. - 1단계 : 상용 시뮬레이터(WinProp) 를 적용할 수 있는 빌딩내에서 무선 전파측정을 수행하고, 이를 상용 시뮬레이터와 본 과제의 개발 시뮬레이 터(ORT)와의 성능 비교를 수행함 - 2단계 : 해양플랜트 건조현장을 대상으로 상용제품인 WinProp 와 개발 결과인 ORT를 성능 비교를 수행함 2) 성능시험 결과 가) 빌딩내 사무공간(1단계) 성능 시험결과 빌딩내 사무공간에 대한 무선 전파측정은 ETRI 12동 건물 내부(4층)에서 수차 례의 전파측정을 통해 실측된 데이터를 수집하였으며, 상용 시뮬레이터인 WinProp 와 본 과제에서 개발한 ORT를 이용하여 시뮬레이션을 수행하였다. 전 파환경은 동일하게 주어졌다. 당해연도 개발목표가 반사파만을 고려한 전파환경 시뮬레이터 개발인 관계로, WinProp 에서는 반사현상, 회절현상 및 투과현상을 모두 고려(반사횟수 2회, 회절횟수 1회, 투과횟수 무제한 적용)한 반면에, ORT 에 서는 반사현상만을 3회 고려하였다는 차이점이 있다. ∎ ETRI 12동(4층)내 송신점 위치와 해석 경로 (송신점1, 송신점2) ∎ 경로손실을 해석 및 측정한 결과 Ÿ 송신점1(Tx-1)에 대한 Route-1, 2 에서의 경로손실 해석 및 측정 결과
Route-1 - Distance [m] - P at h L o ss [ d B ] 0 2 4 6 8 12 14 16 18 20 -2 10 -100 -90 -80 -70 -60 -50 WinProp ORT Measurement - P at h L o ss [ d B ] Route-2 - Distance [m] 0 2 4 6 8 12 14 16 18 -2 10 -80 -60 -50 -40 -70 WinProp ORT Measurement Ÿ 송신점2(Tx-2)에 대한 Route-3, 4, 5에서의 경로손실 해석 및 측정 결과 - P at h L o ss [ d B ] Route-3 - Distance [m] 0 2 4 6 8 12 -2 10 -100 -80 -60 -50 -90 -110 -70 WinProp ORT Measurement - P at h L o ss [ d B ] Route-5 - Distance [m] 0 2 4 6 8 12 -2 10 -60 -55 -50 -70 -65 corner WinProp ORT Measurement Ÿ ORT와 WinProp를 이용한 해석 결과의 오차 분석(측정 결과 기준) - 전체적으로 RMS 오차가 3 - 7 dB 정도 발생 - 특히 Route-1과 Route-3은 회절파의 영향이 큰 경로이며, 회절파를 고려 한 WinProp의 오차가 더 작게 나타남을 보여줌 - P at h L o ss [ d B ] Route-4 - Distance [m] 0 2 4 6 8 12 14 16 20 -2 10 -40 -30 -60 -50 18 -70 WinProp ORT Measurement
송신점 경로 광선추적 모델 경로손실 예측 오차 [dB] (측정값 - 해석값) 평균 표준편차 RMS 오차 Tx-1 Route-1 ORT -0.8 6.1 6.1 WinProp 4.4 3.5 5.1 Route-2 ORT 1.6 3.2 3.5 WinProp 4.5 1.8 4.8 Tx-2 Route-3 ORT 2.4 6.9 7.2 WinProp 2.1 4.6 5.0 Route-4 ORT 2.5 1.8 3.0 WinProp 3.0 1.8 3.5 Route-5 ORT 1.5 2.9 3.3 WinProp 3.3 2.5 4.1 ∎ 측정치와 비교한 WinProp에서 회절 유무에 따른 경로손실 차
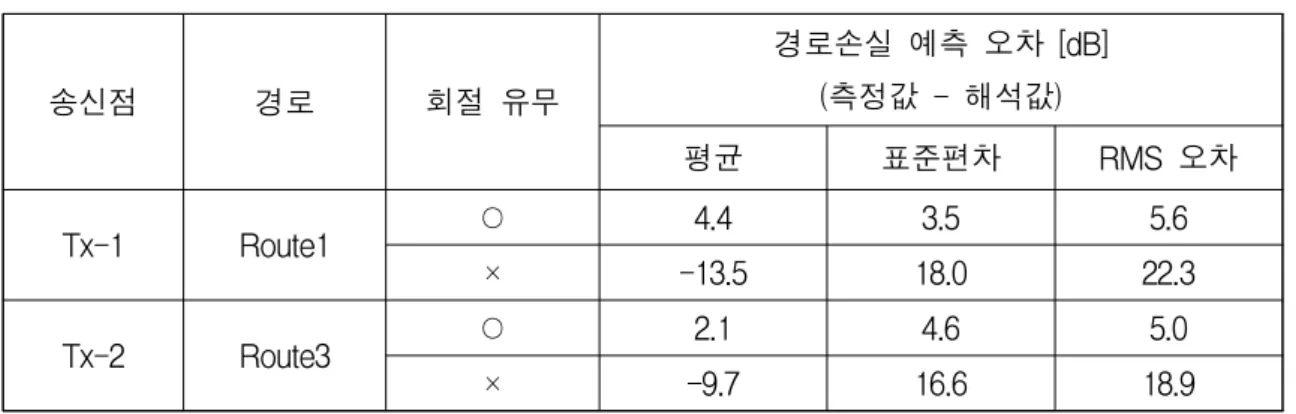
Ÿ 아래 그림은 경로 Route-1과 Route-3에 대하여 WinProp를 이용한 회절 유 무에 따른 해석 결과를 비교한 것과 RMS 경로손실 예측 오차를 보여줌
- 측정 결과를 기준으로, 회절 유무에 따른 WinProp 해석 결과의 RMS 오 차가 15 dB 정도 개선됨
- ORT에서도 회절을 고려하면 경로 Route-1과 Route-3에 대하여 좀 더 정 확한 해석 결과를 얻을 수 있을 것으로 사료됨 Route-1 - Distance [m] - P at h L o ss [ d B ] 0 2 4 6 8 12 14 16 18 20 -2 10 -100 -90 -80 -70 -60 -50 -130 -120 -110 Without diffraction With diffraction Measurement - P at h L o ss [ d B ] Route-3 - Distance [m] 0 2 4 6 8 12 -2 10 -120 -80 -60 -40 -100 -140 Without diffraction With diffraction Measurement
송신점 경로 회절 유무 경로손실 예측 오차 [dB] (측정값 - 해석값) 평균 표준편차 RMS 오차 Tx-1 Route1 ○ 4.4 3.5 5.6 × -13.5 18.0 22.3 Tx-2 Route3 ○ 2.1 4.6 5.0 × -9.7 16.6 18.9 <WinProp를 이용한 회절 유무에 따른 해석 및 측정 결과의 비교> 나) 해양플랜트 작업공간(2단계) 성능 시험결과 해양플랜트 건조현장에 대해 상용 시뮬레이터인 WinProp 와 본 과제에서 개 발한 ORT를 이용하여 시뮬레이션을 수행하였다. 해양플랜트 모델에서 해석을 수행한 두 군데의 송신점 위치와 8 개의 해석 경로를 적용하였다. - ORT는 반사 횟수를 1번부터 3번까지 변화시키면서 해석을 수행하고, 투 과는 고려하지 않았음 - WinProp는 해석 시간의 제약으로 인하여 반사 횟수를 1번만 고려하였으며, 투과와 회절 현상은 고려하지 않았음 ∎ 해양플랜트 모델내 송신점 위치와 해석 경로 (송신점1, 송신점2) Tx-1 Route-1 Tx-1 Route-3 Tx-2 Tx-2 Route-2 Route-4 Route-5 Route-8 Route-7 Route-6 (해양플랜트 모델에서 송신점의 위치와 해석 경로)
∎ 경로손실을 해석 및 측정한 결과 Ÿ 송신점1(Tx-1)에 대한 Route-1, 2, 3, 4, 5에서의 경로손실 해석 및 측정 결과 - 반사를 1번만 고려하였을 경우, ORT와 WinProp를 이용한 해석 결과가 거의 유사함을 알 수 있음 - ORT의 경우, 반사 횟수를 증가시키면 해석 가능한 전파경로가 증가하기 때문에 경로손실이 작게 예측되는 것을 확인 - P at h L o ss [ d B ] Route-1 - Distance [m] 0 2 4 6 8 12 14 16 18 22 -2 10 -80 -75 -70 -65 -60 -55 20 ORT-2 ORT-1 WinProp ORT-3 - P at h L o ss [ d B ] Route-2 - Distance [m] 0 4 8 12 16 20 28 -4 -75 -70 -65 -60 -55 -50 24 ORT-2 ORT-1 WinProp ORT-3 - P at h L o ss [ d B ] Route-3 - Distance [m] 0 5 10 15 20 25 45 -5 -80 -75 -70 -65 -60 -55 35 40 30 ORT-2 ORT-1 WinProp ORT-3 - P at h L o ss [ d B ] Route-4 - Distance [m] 0 4 8 12 16 20 -4 -80 -75 -70 -65 -60 28 32 24 ORT-2 ORT-1 WinProp ORT-3 - P at h L o ss [ d B ] Route-5 - Distance [m] 0 2 4 6 8 10 18 -2 -80 -75 -70 -65 -60 14 16 12 ORT-2 ORT-1 WinProp ORT-3 Ÿ 송신점2(Tx-2)에 대한 Route-6, 7, 8에서의 경로손실 해석 및 측정 결과 - 반사를 1번만 고려하였을 경우, ORT와 WinProp를 이용한 해석 결과가 거의 유사함을 알 수 있음 - ORT의 경우, 반사 횟수를 증가시키면 해석 가능한 전파경로가 증가하기 때문에 경로손실이 작게 예측되는 것을 확인
-- P at h L o ss [ d B ] Route-6 - Distance [m] 0 4 8 12 16 32 -4 -75 -70 -65 -60 -55 -45 24 28 20 -50 ORT-2ORT-1 WinProp ORT-3 - P at h L o ss [ d B ] Route-7 - Distance [m] 0 2 4 6 8 10 18 -2 -75 -70 -65 -60 -55 -50 14 16 12 ORT-2 ORT-1 WinProp ORT-3 - P at h L o ss [ d B ] Route-8 - Distance [m] 0 2 4 6 8 10 18 -2 -75 -70 -65 -60 -55 -50 14 16 12 ORT-2 ORT-1 WinProp ORT-3
2 이동객체의 작업구역 위치 정합율 1) 성능시험 방법 개발되어진 프로토타입 UWB 측위 시스템의 성능 검증을 위하여 Anchor를 건물에 설치하고 Tag들을 건물 내 또는 외부에 위치시켜 위치 정합률 실험을 수행 하였다. 위치 정합률을 보기 위하여 Anchor 및 Tag의 데이터 이동 상황을 파악할 수 있는 sniffer 및 측위용 프로그램을 개발하여 실험을 진행하였다. (기본 실험 구성)
n Tag 3 ea, Anchor 3set, 노트북, USB 케이블, sniffer, 측위 프로그램
2) 성능시험 결과
n Tag 및 Anchor 인식 테스트 결과
( Tag(1ea)와 Anchor(3ea) )
ⵔ Superframe(350ms): 시작상태 St_txPOLL:TX에서 다음 Superframe
시작상태 St_txPOLL:TX까지 시간 간격이 프로토콜 설정값과 일치
ⵔ Slot(35ms): TWR 구간인 St_txPOLL:TX에서 St_TxFIN:TX까지 시간 간격이 15ms
ⵔ Anchor의 Response 메시지 수신 확인
n 새로운 TAG 등장 및 멀티홉 릴레이 테스트 결과
ⵔ Superframe의 slot(0) 시작부터 다음 superframe의 slot(0) 시작까지 의 시간 간격이 350ms로 일치
ⵔ Slot(0) 시작부터 Tag ID=5가 참여하는 slot(5) 시작까지 간격 175ms 로 정상
ⵔ 각 Tag의 TWR 절차 POLL(90), RESPONSE(ae), FINAL(f9), TOSS(78) 순서 확인으로 정상 동작 확인
n Tag 위치 인식 테스트 결과
(측위 프로그램을 이용한 Tag 위치 인식 테스트 결과)
ⵔ 그림(a)는 Tag ID=0이 측위를 수행하고 있는 중에 Tag ID=5를 앵커 들 내부로 진입시킨 것으로 시스템에 문제 없이 측위를 수행하였으 며 앵커들 내부에 위치함을 볼 수 있다.
ⵔ 그림(b),( c)는 Tag들을 교대로 앵커들의 외부로 내보내면서 실험을 수행한 것으로 실제로 앵커들 내부에 위치한 태그와 외부로 내보낸 태크의 측위가 정상적으로 동작함을 볼 수 있다.
ⵔ 그림(d)는 area1, area2, area3에 각각 Tag들을 1개씩 위치 시키고 area1의 앵커에 측위 프로그램을 연결하여 area3의 Anchor와 Tag의
거리정보들을 area2로, 다시 area3과 area2의 거리정보들을 마스터 Anchor간의 멀티홉 릴레이를 통한 측위가 정상적으로 동작함을 볼 수 있다. ⵔ 본 실험의 결과는 개발된 프로토타입 UWB 측위 시스템을 기반으로 수행되었으며, 당해연도 작업자 위치인식률 80%를 달성한 것으로 보이나 환경에 따른 다양한 실험을 통하여 시스템의 안정화 등이 추가로 필요하다.
3 작업자 사고판단 오류
작업자 사고판단 시스템의 성능을 검증하기 위해 다른 추론엔진에 비해 매우 빠르고 효율적인 성능을 가진 것으로 알려진 JESS(Java Environment System Shell) 추론엔진을 기반으로 프로그램을 개발하고 시험하였다. 1) 성능시험 방법 작업자 사고 판단을 위한 기능시험을 위해서는 사고유형을 사전에 정의하는게 필요하며, 사고유형에 따른 작업장 및 작업자 상태를 파악해야 한다. 본 시험을 위해 다양한 사고 가운데 아래와 같이 3가지 사고유형을 정의하고 이러한 사고를 유발할 수 있는 상태를 정의하였다. 위에서 정의한 작업장 및 작업자 상태는 JESS 추론엔진에서 활용될 수 있는 Fact 및 Rule 모델링을 위한 구성요소가 된다. 아래 그림은 성능을 시험하기 위한 시험 구성도를 나타낸다. (사고 예측 시험 구성도) 가) Fact 모델링 사고유형 작업장 상태 작업자 상태 밀폐공간, 유해가스 질식 유해가스 농도 적정치 이상 안전장구(마스크) 미착용 추락 - 안전장구 미착용 낙하물 - 안전장구 미착용
Fact는 작업장 및 작업자의 현재 상태를 의미한다. 본 시험에서는 시뮬레 이터를 통해서 이러한 데이터를 전달 받아서 활용하였고, Fact 구성을 위한 데이 터셋을 아래와 같이 구성하였다.
(deftemplate region "A region specification" (slot code) ; 작업장 코드 (slot risk_kindof) ; 작업장의 위험요소 (slot risk_magnitude) ; 유해가스 농도 (slot workers_safety_state) ; 안전장구 착용상태 (slot risk_level)) ; 위험레벨 각각의 슬롯에는 시뮬레이터에서 랜덤(일정한 규칙에 기반)하게 발생한 데이터를 할당하여 아래와 같이 7개의 데이터셋을 만들었다. 위의 데이터셋에서 밀폐구역은 유해가스농도 및 안전장구 착용과 연관이 있고, 추락 및 낙하물 구역은 안전장구 착용 여부와 관련이 있다. 이들 데이터셋은 작업장 및 작업자에 대한 실시간 감시 센서를 통해 취득한 것과 유사한 형태의 시뮬레이 터를 이용하여 생성하셨다. 나) Rule 모델링 Rule 모델링은 각 구역별 상황에 따라 작업장 및 작업자 상태 정보가 입력되는 경우 작업자의 위험 상태를 판단하기 위한 작업에 해당된다. 아래 그림은 각 구역별 특성에 따라 입력된 상태정보를 판단하여 작업자의 위험도 상태를 상(붉은색), 중 (황색), 하(녹색)으로 나타낸 것이다. 본 시험에서는 유해가스 농도와 작업자가 구역 특성에 맞는 안전장구를 착용했는지 여부에 따라 결과를 얻도록 반복 시험하였다. 구분 1 2 3 4 5 6 7
code A001 A002 A003 A004 A005 A006 A007 risk_kindof 밀폐구역 밀폐구역 밀폐구역 추락구역 낙하물구역 추락구역 추락구역 risk_magnitude 83 53 38 45 21 26 16 workers_safety_state 착용 착용 착용 미착용 착용 착용 미착용
(Rule 모델) 2) 성능시험 결과 및 고찰 아래 표에서 항목 risk_level은 시뮬레이터에서 발생한 임의의 데이터셋을 JESS 추론엔진에 입력하여 얻어진 결과를 나타낸다. Rule 모델링에서 판정한 결과대로 얻어진 것을 확인할 수 있다. 구분 1 2 3 4 5 6 7 정확도
code A001 A002 A003 A004 A005 A006 A007
risk_kindof 밀폐구역 밀폐구역 밀폐구역 추락구역 낙하물 구역 추락구역 추락구역 risk_magnitude 70 53 70 - - - -workers_safety_state 착용 착용 착용 미착용 착용 착용 미착용 reference_level 중 하 중 상 중 하 상 risk_level 중 하 상 상 중 하 상 86% 다만, 1번, 3번과 같이 같은 유해가스농도 및 안전장구 착용 상태에 대해서 서로 다른 위험도 결과를 얻은 것은 JESS 추론엔진의 문제가 아닌 Rule 모델링의 모순에 따라 나타난 것이다. 이는 유해가스농도가 Rule 모델링에서 지시한 판정치의 경계에 해당하는 경우 상황에 따라 다른 결과값을 얻을 수 밖에 없게 되어있다. 이 부분은 퍼지모델과 같이 애매한 상황에 대해 올바른 결과를 얻을 수 있도록 수정되어야 할 부분이다.
4, 5 동시 관제 작업자 수 및 처리 가능한 사고 유형수 동시 관제 작업자 수와 처리 가능한 사고 유형수에 대한 2016년 목표는 다음과 같다. 성과지표 (주요성능 Spec) 단위 기술개발 목표치(‘16) 검증방법 동시 관제 작업자 수 (1 sec 이내) 명 500명 이상 시뮬레이션 기반으로 작업자 수 입력 후 처리속도 확인 처리 가능한 사고 유형수 개 2개 이상 시뮬레이션 기반으로 사고 유형에 따 른 사고 발생 후 사고 유형분류 정확도 확인 조선해양 및 육상플랜트와 같은 고위험 산업 현장에서는 작업자의 안전을 위 협하는 다양한 위험 요소가 산재하고 적절한 안전장구의 착용은 안전사고 예방을 위한 기본 원칙이다. 여러 사고 유형 중에 추락 사고는 사망 사고로 이어지는 경 우가 많으며 가스누출 사고의 경우 질식 사고와 같은 사망사고 또는 화재폭발과 같은 대형 참사로 이어지는 경우가 많다. 따라서 본 연구에서는 안전장구미착용, 추락, 가스누출 사고를 우선적으로 판별하고자 한다. 1) 성능시험 방법 작업자의 안전 확보를 위해 실시간 작업 상태정보에 따라 필수 착용해야 하는 개인보호장비(안전장구, 환경정보 수집장치 등)를 실시간으로 결정하고, 개인보호 장비 착용 여부에 따른 위험 사항을 판별해야 한다. 이를 위하여 우선적으로 작업 장별 필수 착용 개인보호장비를 다음과 같이 정의하였다. 작업장 안전모 안전벨트 안전고리 안전화 가스센스 사무실 - - - - -조선야드 O O - O -선내 작업장 O O O O -밀폐공간 O O O O O 위에서 정의된 것과 같이 사무실에서는 모든 개인보호장비 착용이 필요 없으며 밀폐공간의 경우 가스센스를 포함하여 모든 개인보호장비를 착용해야 한다는 것을 가정하고 있다. 위험 레벨은 3레벨(안전, 경고, 위험)로 정의하고 판단 조건은 한개 미착용시 경고, 두개 이상 미착용시 위험으로 판단한다. 안전고리는 추락 상황을 판별하는 것으로 추락 상황이 감지되는 경우 바로 위험으로 판단한다. 가스센서는 가스누출 상황으로 가스누출이 감지되는 경우 바로 위험으로 판단한다. 아래 그림은 성능을
판단하기 위한 시험 구성도를 나타낸다.
(실시간 작업자 안전 모니터링 시스템 구성도)
가) 실시간 작업자 안전 모니터링 시스템
실시간 작업자 안전 모니터링 시스템은 각 장치들의 크기, 무게, 전원 사용량을 최소화 하기 위한 방안으로 각 장치에서 필요한 최소한의 부분만을 남겨서 PPE(Personal Protective Equipment)를 구성하고, 각 PPE들이 공용으로 사용할 수 있는 MCU부, 모니터링 센터 플랫폼과의 통신부, 인터페이스부 등을 분리하여 PPP(Personal Protective Platform)를 구성한다. 실시간 작업자 안전 모니터링 시 스템은 PPE(Personal Protective Equipment), PPP(Personal Protective Platform), MCP(Monitoring Center Platform)로 구성된다.
§ PPE(Personal Protective Equipment)
스마트 개인보호장비에서 각 장비들이 공용으로 사용할 수 있는 MCU부, 모 니터링 센터 플랫폼과의 통신부, 인터페이스부 등을 제거하여 최소한으로 구 성하고 제거된 부분은 PPP에 연결해서 PPP의 기능을 사용하는 개인 안전 장치
§ PPP(Personal Protective Platform)
스마트 개인보호장비에서 각 장비들의 크기, 무게, 전원 사용량을 최소화 하기 위해 각 장비들이 공용으로 사용할 수 있는 MCU부, 모니터링 센터 플랫폼 과의 통신부, 인터페이스부 등을 분리하여 구성한 개인 안전 플랫폼
§ MCP(Monitoring Center Platform)
작업장 환경 등)와 데이터베이스 정보(작업자 정보, 작업자 PPE 및 PPP 정보, 작업장/작업환경/작업자역할/작업종류 등에 따른 필수 PPE 정보 등)에 기초 하여 작업자 안전상황을 추론하고 추론결과에 따라 제어 및 모니터링 나) 동시 작업자 생성 동시 관제 작업자 수 및 처리 가능한 사고 유형수에 대한 시뮬레이션 기반 검 증을 위해서 다음 그림과 같이 동시 작업자를 생성한다. (동시 작업자 생성 구성도) 작업자는 실 작업자와 가상 작업자로 분리해서 구성하고 실 작업자는 다음과 같이 실제로 작업자가 착용하는 PPE, PPP 장치를 구축하였다. (실 작업자 시뮬레이션을 위한 PPE 및 PPP 구성)
다수의 가상 작업자는 다음의 그림과 같이 가상 작업자 생성기를 통해서 작업 장별로 원하는 수의 작업자를 생성하고, 검증을 위해서 개인보호장비 미착용자와 미착용 개인보호장비를 설정한다. 생성된 가상 작업자는 개인보호장비 소지 및 착 용여부와 가스측정 등의 실시간 수집 정보를 가상으로 MCP로 전송한다. (가상 작업자 생성 및 실시간 데이터 전송) 다) 검증을 위한 GUI 구성 (실시간 작업자 안전 모니터링 시스템 화면 구성)
위와 같이 동시 관제 작업자 수 및 처리 가능한 사고 유형수 검증을 위한 실시간 작 업자 안전 모니터링 시스템은 작업장별로 작업자들의 개인안전장비 착용여부와 추락, 가스누출 등의 안전 여부를 종합 판단하여 3개의 위험 레벨(안전, 경고, 위험)로 상태를 보여준다. 다음의 그림은 처리 가능 사고 유형수 검증을 위한 화면 구성이다. 다음의 그 림과 같이 안전장구미착용, 추락 위험, 가스누출에 의한 질식 위험 등 3가지의 위 험을 판별한다. (처리 가능 사고 유형수 검증 (2개 이상)) 다음의 그림은 동시 관제 작업자 수를 검증하기 위한 화면 구성이다. 500명 이 상의 작업자에 대하여 1초 이내 위험을 판단하고 조치하는 것을 보이기 위해 시 작시간과 종료시간을 측정하여 소요시간을 계산하였다. 신뢰성 있는 소요시간 측 정을 위해 그래프와 평균시간을 함께 보인다. (동시 관제 작업자 수 검증 (500명 이상 1sec 이내))
2) 성능시험 결과 및 분석 다음의 그림은 동시 작업자 500명에 대한 검증 결과 화면을 보인다. (1)에서 작 업자들에 대한 상태를 위험, 경고, 안전으로 구분하여 실시간 모니터링을 수행하고, (2)에서 사고 유형별로 해당하는 작업자를 보이고 있다. (3)에서 위험판단 소요시 간과 평균시간을 보이고 (4)에서 소요시간을 그래프로 나타내고 있다. (동시 작업자 수 500명에 대한 검증) 위의 결과와 같이 500명 작업자에 대하여 2가지 이상(안전장구미착용, 추락 위험, 가스누출)의 사고 유형을 판별함에 있어 평균 220ms 정도의 시간이 소요되고 최대 450ms 이내의 시간이 소요됨을 확인 할 수 있다. 다음의 그림은 동시 작업자 1,000명에 대한 검증 결과 화면을 보인다. (1)에서 작업자들에 대한 상태를 위험, 경고, 안전으로 구분하여 실시간 모니터링을 수행 하고, (2)에서 사고 유형별로 해당하는 작업자를 보이고 있다. (3)에서 위험판단 소요시간과 평균시간을 보이고 (4)에서 소요시간을 그래프로 나타내고 있다.
(동시 작업자 수 1,000명에 대한 검증) 위의 결과와 같이 1,000명 작업자에 대하여 2가지 이상(안전장구미착용, 추락 위험, 가스누출)의 사고 유형을 판별함에 있어 평균 378ms 정도의 시간이 소요되고 최대 500ms 이내의 시간이 소요됨을 확인 할 수 있다. 검증 결과를 통해 3가지 사고 유형에 대한 위험을 판별함에 있어 소요시간이 500명 작업자의 경우 평균 220ms로 측정되었고, 1,000명 작업자의 경우 378ms로 측정되어 처리 가능한 사고 유형수 2개 이상과 1초 이내에 동시 관제 작업자 수 500명 이상에 대한 성과지표를 만족함을 보였다. 향후 처리 가능한 사고 유형수와 위험판단 알고리즘 복잡도가 높아짐에 따라서 소요시간의 증가가 예상되나 1초 이내에 모든 판단이 이루어 져야 하는 요구는 지속적으로 유지되어야 한다.
6 게이트 출입 식별 정확도 1) 성능시험 방법 게이트 출입정보에 대하여 정확도를 측정하기 위하여 해당 장비가 설치되어 구성되어 사용되고 있는 환경과 유사한 환경을 구성하고 시스템에서 입력된 데이 터를 기반으로 인식률 확인을 진행한다. 가) 시험 환경 시험 환경은 현재 구축된 S중공업의 환경과 동일한 환경을 구성하고 테스트를 진행한다. 다음 그림은 해양 플랜트에 구성된 시험환경이다. (시험 환경 구성) 게이트는 4개의 구획으로 구분하여 구성된다. GATE 1번과 GATE 2번은 UTILITY 모듈이며, GATE 3번과 GATE 4번은 PROCESS 모듈로 구분한다. GATE 1번은 1층, 2층 3층, 4층, 6층, 7층, 8층을 통과할 수 있으며. GATE 2번은 5층을 제외한 모든 층, GATE 3번은 모든 층, GATE 4번은 2층과 3층을 제외한 전체 층 으로 출입이 가능하도록 설정한다.
구역을 인식하기 위한 시험 용도로 구성하였다. GATE 4번의 경우 1층에서 입구를 두개로 구분하여, 엘리베이터와 도보 출입이 가능하도록 구성하였다. 총 안테나 리더기의 개수는 비콘을 포함하여 124개로 구성하였다. 1층은 총 28개, 2층과 3층은 각 12개, 4층은 총 16개, 5층은 총 8개, 6층은 총 12개 7층은 비콘 안 테나 포함 총 20개, 8층은 16개로 구성되어 있다. 다음의 표에 리더기의 위치가 요약되어 있다. 구분 출입 UTILITY 모듈 PROCESS 모듈 위험구역 합계 게이트 1 게이트 2 게이트 3 게이트 4 게이트 5 1층 Elevator OUT 4 4 4 4 16 Gangway1 IN 4 4 8 Gangway2 IN 4 4 2층 Gangway IN 4 4 4 12 3층 Gangway IN 4 4 4 12 4층 Gangway IN 4 4 4 4 16 5층 Gangway IN 4 4 8 6층 Gangway IN 4 4 4 12 7층 Gangway IN 4 4 4 4 3 19 Gangway OUT 1 1 8층 Gangway IN 4 4 4 4 16 합계 28 28 32 32 4 124 (리더기의 위치) 나) 시험 방법 시험 진행 시 인식률은 인식이 되지 않은 데이터는 입력 프로그램을 통해 입 력하고 전체 데이터를 기반으로 인식률을 계산한다. 시스템에서 입력된 데이터는 인식으로 처리하고, 인식이 되지 않아 관리자에 의해 입력 프로그램을 통해 입력된 데이터는 미인식으로 구분하여 인식률을 측정한다. 2) 성능시험 결과 인식된 데이터의 확인은 출입 RowData(POB_IO_HIST_RAW) 테이블과 출입 이력_공사(POB_IO_HIST) 테이블을 기준으로 확인 가능하다. POB_IO_HIST_RAW 데이터는 시스템에 수신된 전체 데이터를 저장한다. 배치로 초당 실행되는 프로그 램에 의해 해당 데이터는 POB_IO_HIST 테이블로 저장한다. 저장 시 이중으로 인 식된 데이터(IN 데이터와 동일하게 구성된 IN 데이터, OUT 데이터 이후 동일하게 구성된 OUT 데이터 등 을 필터링)를 구분하여 저장한다. 저장된 데이터를 사용자