http://dx.doi.org/10.5369/JSST.2017.26.4.251 pISSN 1225-5475/eISSN 2093-7563
섭동 입력을 사용한 구배 값 추정용 센서 신호 처리
이수용+
Sensor Signal Processing for Estimating Gradient Values using Perturbation Input
Sooyong Lee+
Abstract
According to recent studies by scientists about how to search for food, homes and the mates, it is found that the gradient information plays a key role. From cells to insects and large animals, they mostly either have special sensing organism or use a strategy to measure the gradient. Use of a perturbation as an additional input is introduced for sensor signal processing in order to get the gradient information. Different from typical approach, which calculates the gradient from differentiation, the proposed processing is done by a form of integration, thus it is very robust to noise. Discrete time domain analyses are given for one, two and three input functions for the estimation of the gradients. The amplitude and the frequency of the per- turbation are two important parameters for this approach. A quantitative index to measure the effects of the amplitude is developed based on the linear regression analysis. The frequency of the perturbation is to be selected high enough to finish one period of the perturbation before the property is changed significantly with respect to time. Another quantitative index is proposed for guiding the selection of the frequency.
Keywords: Gradient, Perturbation, Active sensing
1. 서 론
센서 신호의 해석에 대한 연구는 센서 신호와 측정하고자 하 는 물성(物性)사이의 관계를 찾아내는 것이며, 이 관계를 효율 적이고 높은 신뢰도로 찾아내는 것이 연구의 주 내용이었다. 기 존의 연구들은 거의 대부분 고정적인 센서들로부터의 신호를 해 석하는 것이었으며 매우 드물게 센서 자체에 운동성을 가미함 으로써 효율과 신뢰도를 높이는 연구가 있었다. 예를 들어 능동 적 소나센서에 관한 연구[1], 냄새판독에 관한 연구[2]등에서는 다수의 센서들 중 가장 적합한 센서를 선택하는 방법을 소개하 였다. 다수의 센서들로부터의 신호에 대한 정보융합을 통하여 센서의 위치를 결정하는 연구[3]가 수행되기도 하였다. 특히 환 경인지 기술은 다양한 센서들의 발전과 더불어 센서정보를 처
리/융합하여 유용한 정보를 추출하는 기술이다.
생태계에는 능동형 감지 기능을 갖는 생물들이 다수 존재한 다. 개똥벌레는 스스로 빛을 내며 짝을 찾고, 심해에 사는 dragonfish 는 적외선을 발광하기도 한다. 또한 전기어(電氣漁) 는 주변을 탐색하기 위하여 전기장을 생성하여 수력학영상 (hydrodynamic image)을 얻는다. 박쥐는 초음파를 발사하여 반사파를 받을 때까지의 시간으로부터 벽까지의 거리를 인식 하며, 돌고래와 범고래들도 수중에서 음향반사를 이용한다. 보 다 특징적인 생물들 중의 하나는 별코두더지이다. 별코두더지 는 스테레오 신체 기관을 사용하여 연속적으로 냄새를 맡아 냄새 구배(gradient)값을 이용하여 넓은 지역에서 매우 빠른 속도로 먹이를 찾는다고 알려졌다[4]. 즉 단순한 센서 측정 값 이 아니라 이의 구배값을 사용하여 더 효율적인 결과를 얻는 경우가 많이 있다. 또 다른 예로 오리너구리는 다양한 전기 자 극을 감지할 수 있는 전기 수용체가 달려 있으며 이로부터 전 기량의 차이를 감지해 신호가 오는 방향을 찾을 수가 있다. 물 속에서 끊임없이 머리를 좌우로 흔들며 수중 먹이들이 근육에 서 발산되는 미세한 전기들을 감지해 사냥을 할 수 있는 것이 다[5]. 또한 코끼리주둥이고기 (Gnathonemus Petersii)는 약한 전기장을 생산하는 발전 장기를 갖고 있으며 전압의 변화 속 도를 민감하게 감지할 수 있는 능동적 전기 수용장치를 사용 하여 먹이를 찾는다[6]. 제왕나비는 철새처럼 대규모 이주를
홍익대학교 기계시스템디자인공학과(Department of Mechanical andSystem Design Engineering, Hongik Unversity) 94 Wausan-ro, Mapo-gu, Seoul 04066, Korea
+Corresponding author: [email protected]
(Received: Jun. 20, 2017, Revised: Jul. 18, 2017, Accepted: Jul. 24, 2017)
This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License(http://creativecommons.org/
licenses/bync/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
하는데, 이때 두 개 더듬이에서 받아들인 정보의 차이를 이용 하여 태양의 위치를 인식하여 방향을 찾는다고 연구되었다[7].
이와 유사하게 초파리는 오른쪽 더듬이와 왼쪽 더듬이에서 인 식된 냄새를 구분하여 냄새의 방향을 측정한다[8]. 마찬가지로 벌은 꽃이 발생하는 미세한 전기장에 의한 몸털의 움직임을 인지하여 꽃을 찾아갈 수 있다고 연구되었다[9].
생화학분야에서는 진핵 세포가 외부 자극에 의한 크롤링운 동(crawling movement)을 하며 이에 관한 연구가 진행되고 있다[10]. 크롤링운동을 발생시키는 외부자극은 화학유인물질 구배값(chemoattractant gradient)이고 세포는 화학유인물질이 가장 많이 증가하는 방향으로 이동한다고 발표되었다. 이 연 구에서는 세포가 구배값을 측정하고 가장 높은 화학유인물질 농도에 노출될 리딩에지(leading edge)를 인식하여 정확한 방 향으로 이동하는 메커니즘을 모델화하였다. 한편, 분자 결합 에 대한 연구[11]에서는 분자결합의 온도 의존성을 측정하기 위하여 공간의 온도구배로부터 표면 플라즈몬 공명 (surface plasmon resonance) 이미지 측정을 기반으로 한 방법을 해석 하였다. 이 방법을 사용하여 분자결합의 정량적 분석을 단순 화하고 분자결합의 온도 의존성을 시간에 대한 함수로 모니 터링 할 수 있으며, 또한 온도구배를 교정하는 간단한 방법 을 제시하였다. 생물학 분야에서는 확산성의 구배값 기질결 합분자(substrate-bound molecule)가 신경계에서 축색돌기를 적절한 목표로 유도하는데 중요한 역할을 한다는 연구 결과 를 발표하였다[12]. 이 연구에서는 구배값 감지의 Berg and Purcell 모델을 제시하였다. 구배값 측정이 두 공간적 또는 시 간적으로 분리된 지점의 농도를 비교로 이루어진다고 가정함 으로써, 제안된 모델은 생리적 지수의 함수로 측정되는 구배 값의 급상승에 대한 추정치를 제공하였다. 화학적 구배를 감 지하는 능력은 많은 세포과정의 기본으로 알려졌다. 예를 들 어 다세포 생물에게 구배값 감지는 상처 치유 및 발달과 같 은 많은 생리적 과정에 중요한 역할을 한다. 유리한 환경으 로의 이동 또는 성장에 구배값을 사용하며 페로몬 분자의 시 간 평균화 및 내부화와 같은 노이즈 감소 메커니즘을 이용하 여 효모세포가 어떻게 변이를 걸러내고 미소 구배값을 측정 하는지 설명되었다[13].
한편 환경 인지를 위하여 센서를 배치할 때 인지능력을 향상 시키기 위하여 초기 센서 위치의 수정이 필요할 수 있다. 이와 마찬가지로 이동 로봇이나 무인 비행체 등의 경로를 단순히 조 종자가 일일이 원격조종하는 것이 아니라 자율적으로 감지 경 로를 스스로 생성할 수 있어야 한다. 대부분의 경우 측정 대상 물리량이 균일 분포하지 않으므로 이에 대한 고려가 반드시 필 요하고, 또한 정적인 분포가 아니라 시간에 대하여 변하는 환경 에서는 지속적으로 센서의 위치, 또는 이동 경로의 수정은 필수 적이다. 센서네트워크, 로봇분야에서도 이러한 구배값을 이용하 여 센서 노드 재배치[14]나 주행 로봇의 이동 경로 생성[15]에 이용하였다.
본 논문에서는 측정량의 공간에 대한 구배값을 구하기 위하 여 입력신호에 섭동신호를 가하며, 한 주기 동안 출력의 변화를 기반으로 적분형식의 구배값을 구하는 이론을 이산시스템에 대 하여 증명하였다. 섭동 신호의 두 주요 요소인 진폭과 주파수에 대한 고찰이 이루어졌으며, 이 값에 따른 구배값 추정 오차를 정량화 할 수 있는 지수값을 제안하여 이를 다양한 경우에 대 하여 검증하였다.
2. 섭동 신호를 이용한 구배값 추정
물리량의 측정을 위하여 센서를 사용하는 기존의 방법은 측 정값을 기록하며 이의 시간에 대한 구배값과 측정위치에 대한 구배값을 계산하는 것이다. 그러나 이는 단순히 측정값의 차이 를 측정 시간의 차이로 나눈 시간에 대한 구배값, 또는 측정값 의 차이를 측정위치의 차이로 나누어 구한 위치에 대한 구배값 을 의미한다. 이러한 미분 형식의 구배값 계산은 다양한 형태의 측정 오차나 잡음에 대하여 취약할 수 있다. 이러한 문제점을 개선하기 위하여 적분 형태의 구배값 추정 방법을 제안하며, 이 를 이산시스템에 대하여 이론적으로 정리한다. 먼저 단일 입력 변수 x의 함수 의 경우, 입력 변수 값 x = x
o일 때의 구배값 를 구하고자 하면 다음과 같이 진폭 ε를 갖는 섭동 신호를 입력 변수에 추가한다.
(1)
여기서 이다. 입력 변수 값 x = x
o일 때의 선형화 된 함수가 의 식으로 나타내어진다면 a
2값이 구배값을 의미한다. 따라서 일차 함수 식의 기울기에 해당하는 a
2값을 구 하기 위하여 다음과 같이 식을 구성하고,
(2) 이를 각각 에 대하여 미분한 값이 0인 연립 방정식으로 부터 그 값을 구한다.
(3)
(4) 다음 관계식들로부터
(5) F x ( )
xo
F x
∂
∂
( )
i o
sin
nx = x + ε
πi
i 1…2n = a
1+ a
2x
( )
22
1 1 2
1 n
( )
i i
i
F x a a x
=
∏ = ∑ ⎡ ⎣ − + ⎤ ⎦ a
1, a
2( )
1 2
1 2
1 1
2
n( )
i i0
i
F x a a x
a
=∂ ∏ = − ∂ ∑ ⎡ ⎣ − + ⎤ ⎦ =
( )
2 2
1 1 2
2 1
2
n i( )
i i i0
i
x F x a x a x
a
=∂ ∏ ∂ = − ∑ ⎡ ⎣ − + ⎤ ⎦ =
2 2
( )
1 1
sin 2
n n
i o n o
i i
x x ε
πi nx
= =
⎡ ⎤
= ⎣ + ⎦ =
∑ ∑
(6)
이 연립방정식을 정리하여 행렬식 형태로 다음과 같이 나타내고
(7)
이로부터 해를 구하면,
(8)
(9) 와 같이 단순화 된다. 따라서 구하고자 하는 함수의 구배값은
(10) 이다. 위 식(9)에서 알 수 있듯이 구배값의 계산시 미분 형식이 아닌 적분 형식으로 그 값을 구하였다.
다음으로 입력 변수가 인 함수 의 경우 입력 변수
값 일 때 각각의 구배값 를 구하기
위하여 앞서 기술한 방법을 적용하기 위하여 다음과 같이 서로 직교하는 섭동 신호를 각 입력 변수에 추가하며,
(11)
(12)
여기서 이다. 입력 변수 값 일 때의
선형화된 함수가 의 식으로 나타내어진다면 와
값이 각각의 구배값이다. 이들을 구하기 위하여 다음과 같이 식을 구성하고,
(13) 이를 각각 에 대하여 미분한 값이 0인 연립 방정식
을 정리하여 그 해를 구하면,
(14)
(15)
(16) 또한 다음 관계식들이 성립하므로,
(17)
(18)
(19) 연립방정식을 정리하여 다음과 같이 행렬식으로 나타낼 수 있다.
(20)
이로부터 해를 구하면,
(21)
2 2 2
( )
2 2 21 1
sin 2
n n
i o n o
i i
x x ε
πi nx n ε
= =
⎡ ⎤
= ⎣ + ⎦ = +
∑ ∑
2 1 1
2 2 2
2 1
2 2 ( )
2 2
( )
n i i o
o o n
i i
i
n nx a F x
nx nx n a
x F x ε
=
=
⎛ ⎞
⎜ ⎟
⎡ ⎤ ⎛ ⎞ ⎜ ⎜ ⎟ = ⎟
⎢ + ⎥ ⎝ ⎠ ⎜ ⎟
⎣ ⎦
⎜ ⎟
⎝ ⎠
∑
∑
2 2
( )
1 1 1
1 ( ) ( ) sin
2
n n
i o i n
i i
a F x x F x i
n
=n ε
= π⎡ ⎤
= ∑ − ∑ ⎣ ⎦
[ ]
( ) ( )
( )
2 2
1 1
2 2
2 2
1 1
2 2
2 1
( ) ( )
( ) ( ) sin
( ) sin
n n
i i o i
i i
n n
i i o i n
i i
n
i n
i
x F x x F x
a n
F x x x F x i
n n
F x i
n
π
π
ε
ε
ε ε
ε
= =
= =
=
−
=
⎡ ⎤
−
⎡ ⎤
⎣ ⎦ ⎣ ⎦
= =
⎡ ⎤
⎣ ⎦
=
∑ ∑
∑ ∑
∑
2
( )
2 1
( )sin
o
n
i n
i x
F x i
F a
x n
π
ε
=
⎡ ⎤
⎣ ⎦
∂ = =
∂
∑
x y , F x y ( , )
x x =
o, y = y
o, ,
,
o o o o
x y x y
F F
x y
∂ ∂
∂ ∂
( )
i o x
sin
nx = x + ε
πi
( )
i o y
cos
ny = y + ε
πi
i 1…2n = x x =
o, y = y
oa
3+ a
4x a +
5y a
4a
5( )
22
2 3 4 5
1
( , )
n
i i i i
i
F x y a a x a y
=
∏ = ∑ ⎡ ⎣ − + + ⎤ ⎦ a
3, , a
4a
5( )
2 2
3 4 5
3 1
2
n( , )
i i i i0
i
F x y a a x a y
a
=∂ ∏ = − ∂ ∑ ⎡ ⎣ − + + ⎤ ⎦ =
( )
2 2
2 3 4 5
4 1
2
n i( , )
i i i i i i0
i
x F x y a x a x a x y
a
=∂ ∏ ∂ = − ∑ ⎡ ⎣ − + + ⎤ ⎦ =
( )
2 2
2 3 4 5
5 1
2
n i( , )
i i i i i i0
i
y F x y a y a x y a y
a
=∂ ∏ ∂ = − ∑ ⎡ ⎣ − + + ⎤ ⎦ =
( ( ) )
2 2
1 1
cos 2
n n
i o y n o
i
y
iy ε
πi ny
=
=
=+ =
∑ ∑
2 2 2
( )
2 2 21 1
cos 2
n n
i o y n o y
i i
y y ε
πi ny n ε
= =
⎡ ⎤
= ⎣ + ⎦ = +
∑ ∑
[ ] ( ( ) ) ( ( ) )
2 2
1 1
sin cos
2
n n
i i o x n o y n
i i
o o
x y x i y i
nx y
π π
ε ε
= =
⎡ ⎤
= ⎣ + + ⎦
=
∑ ∑
[ ]
[ ]
3
2 2
4
2 2
5 2
1 2
1 2
1
2 2 2
2 2 2
2 2 2
( , )
( , )
( , )
o o
o o x o o
o o o o y
n
i i
i n
i i i
i n
i i i
i
n nx ny a
nx nx n nx y a
ny nx y ny n a
F x y
x F x y
y F x y ε
ε
=
=
=
⎡ ⎤ ⎛ ⎞
⎢ + ⎥ ⎜ ⎟
⎢ ⎥ ⎜ ⎟ ⎜ ⎟
⎢ + ⎥ ⎝ ⎠
⎣ ⎦
⎛ ⎞
⎜ ⎟
⎜ ⎟
⎜ ⎟
= ⎜ ⎟
⎜ ⎟
⎜ ⎟
⎜ ⎟
⎝ ⎠
∑
∑
∑
[ ]
( )
( ) ( )
2 2
1 1
4 2
2
1 2
2
1 2
2 1
( , ) ( , )
( , )
( , ) sin
( , ) sin
n n
i i i o i i
i i
x n
i i i o
i
x n
i i x n
i
x n
i i n
i
x
x F x y x F x y
a n
F x y x x n
F x y i
n
F x y i
n
π
π
ε
ε ε ε
ε
= =
=
=
=
−
=
−
⎡ ⎤
⎣ ⎦
=
⎡ ⎤
⎣ ⎦
=
⎡ ⎤
⎣ ⎦
=
∑ ∑
∑
∑
∑
(22)
이다. 따라서 각 입력 변수에 대한 구배값은 각각
(23)
(24)
와 같다.
마지막으로 세 개의 입력 변수를 갖는 함수 에 대하 여도 값은 방법을 적용하면, 다음과 같이 각 입력에 서로 직교 하는 섭동을 다음과 같이 가하고,
(25)
(26)
(27)
입력 변수 값 일 때의 선형화된 함수가
의 식으로 나타내어진다면 값이 각 각의 구배값이다.
(28)
(29)
(30)
(31)
(32)
(33)
(34)
(35)
(36) 이를 정리하여 다음과 같이 행렬식으로 나타낼 수 있고,
(37) 이로부터 각 입력 변수에 대한 구배값은 각각
(38)
(39)
[ ]
( )
( ) ( )
2 2
1 1
5 2
2
1
2 2
1
2 2
1
( , ) ( , )
( , )
( , ) cos
( , ) cos
n n
i i i o i i
i i
y n
i i i o
i
x n
i i y n
i
y n
i i n
i
y
y F x y y F x y
a n
F x y y y n
F x y i
n
F x y i
n
π
π
ε
ε ε ε
ε
= =
=
=
=
−
=
−
⎡ ⎤
⎣ ⎦
=
⎡ ⎤
⎣ ⎦
=
⎡ ⎤
⎣ ⎦
=
∑ ∑
∑
∑
∑
2
( )
4 1 ,
( , ) sin
o o
n
i i n
i
x y x
F x y i
F a
x n
π
ε
=
⎡ ⎤
⎣ ⎦
∂ = =
∂
∑
2
( )
5 1 ,
( , ) cos
o o
n
i i n
i x y y
F x y i
F a
y n
π
ε
=
⎡ ⎤
⎣ ⎦
∂ = =
∂
∑
F x y z ( , , )
( )
i o x
sin
nx = x + ε
πi
( )
i o y
cos
ny = y + ε
πi
( )
2i o z
sin
nz = z + ε
πi
x x =
o, y = y
o, z = z
oa
6+ a
7x a +
8y a +
9z a
7, , a
8a
9( )
22
3 6 7 8 9
1
( , , )
n
i i i i i i
i
F x y z a a x a y a z
=
∏ = ∑ ⎡ ⎣ − + + + ⎤ ⎦
( )
3 2
1 6 7 8 9
6
( , , )
2 0
n i i i
i i i i
F x y z
a a x a y a z
a
=⎡ ⎤
∂ ∏ = − ∂ ∑ ⎢ ⎣ − + + + ⎥ ⎦ =
( )
3 2
1 6 7 2 8 9
7
( , , ) 2
0
n i i i i
i i i i i i i
x F x y z
a x a x a x y a x z
a
=⎡ ⎤
∂ ∏ = − ∂ ⎢ ⎢ ⎣ − + + + ⎥ ⎥ ⎦
=
∑
( )
3 2
1 6 7 8 2 9
8
( , , ) 2
0
n i i i i
i i i i i i i
y F x y z
a y a x y a y a y z
a
=⎡ ⎤
∂ ∏ = − ∂ ⎢ ⎢ ⎣ − + + + ⎥ ⎥ ⎦
=
∑
( )
3 2
1 6 7 8 9 2
9
( , , ) 2
0
n i i i i
i i i i i i i
z F x y z
a z a x z a y z a z
a
=⎡ ⎤
∂ ∏ = − ⎢ ⎥
− + + +
∂ ⎢ ⎣ ⎥ ⎦
=
∑
( ( ) )
2 2
2
1 1
sin 2
n n
i o z n o
i
z
iz ε
πi nz
=
=
=+ =
∑ ∑
2 2 2
( )
2 2 2 21 1
sin 2
n n
i o z n o z
i i
z z ε
πi nz n ε
= =
⎡ ⎤
= ⎣ + ⎦ = +
∑ ∑
[ ] ( ( ) ) ( ( ) )
2 2
2
1 1
sin sin
2
n n
i i o x n o z n
i i
o o
x z x i z i
nx z
π π
ε ε
= =
⎡ ⎤
= ⎣ + + ⎦
=
∑ ∑
[ ] ( ( ) ) ( ( ) )
2 2
2
1 1
cos sin
2
n n
i i o y n o z n
i i
o o
y z y i z i
ny z
π π
ε ε
= =
⎡ ⎤
= ⎣ + + ⎦
=
∑ ∑
[ ]
[ ]
[ ]
6
2 2
7
2 2
8
2 2
9 2
1 2
1 2
1 2
1
2 2 2 2
2 2 2 2
2 2 2 2
2 2 2 2
( , , )
( , , )
( , , )
( , , )
o o o
o o x o o o o
o o o o y o o
o o o o o o z
n
i i i
i n
i i i i
i n
i i i i
i n
i i i i
i
n nx ny nz a
nx nx n nx y nx z a
ny nx y ny n ny z a
nz nx z ny z nz n a
F x y z
x F x y z
y F x y z
z F x y z ε
ε
ε
=
=
=
=
⎡ ⎤ ⎛ ⎞
⎜ ⎟
⎢ + ⎥ ⎜ ⎟
⎢ ⎥
⎜ ⎟
⎢ + ⎥
⎜ ⎟
⎢ + ⎥
⎣ ⎦ ⎝ ⎠
⎛
=
∑
∑
∑
∑
⎜ ⎞ ⎟
⎜ ⎟
⎜ ⎟
⎜ ⎟
⎜ ⎟
⎜ ⎟
⎜ ⎟
⎜ ⎟
⎜ ⎟
⎜ ⎟
⎝ ⎠
7 o, ,o o x y z
F a
x
∂ =
∂
8 o, ,o o x y z
F a
y
∂ =
∂
(40)
와 같다. 이상과 같이 다변수의 경우에도 각 입력변수에 서로 직교하는 섭동신호를 사용하면 한 주기의 섭동만으로 모든 변 수에 대한 구배값을 각각 구할 수 있음을 증명하였다.
3. 섭동 신호의 진폭
앞 장에서 함수의 구배값 추정을 위하여 입력 변수에 섭동 신 호를 가하여 이 입력 신호와 함수 출력과의 상관관계로부터 구 배값을 추정할 수 있음을 증명하였다. 사용한 섭동신호의 주 요 소는 진폭과 주파수이며, 먼저 진폭의 영향을 고찰한다.
다음 그림에 예를 든 단일 입력 함수 의 경우 입력 변 수 값 일 때 함수의 구배값을 구하기 위한 입력 변수의 섭동을 나타내었다.
위 그림에서 입력 섭동의 진폭이 충분히 작은 경우( ) 참값 에 가까운 구배값을 구할 수 있으나, 진폭이 너무 큰 경우( ) 에는 큰 오차의 구배값을 얻게 된다. 이론적으로는 진폭이 작을 수록 상대적으로 더 정확한 구배값을 구할 수 있을 것이나, 실 제 상황에서는 진폭이 너무 작으면 충분한 함수 변화값을 구할 수 없으며, 신호대 잡음비(Signal to Noise Ratio)가 저하될 것 으로 예상한다. 또한 실제로 센서를 구동하는 경우에는 동역학 적 특성에 따라 너무 작은 진폭의 움직임을 구현할 수 없는 경 우도 있다. 따라서 사용한 진폭의 섭동 신호를 이용하여 구한 구배값의 신뢰도를 검증하는 방법이 필요하다.
본 논문에서 제안하는 방법은 섭동을 가한 입력신호의 구역 에서 추정한 선형식을 사용한 출력값
와 함수 출력값 사이의 차이
로부터 신뢰도 판정을 위한 지수로 사용하는 것이다. 앞의 단일 변수 함수의 경우 이 지수를 다음 식과 같이 정의한다.
(41)
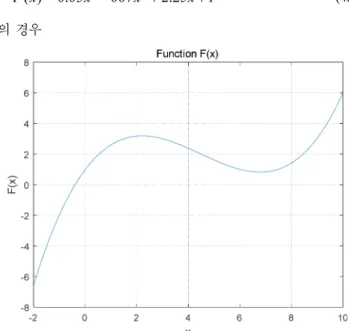
이 값이 0에 가까울수록 추정한 구배값을 신뢰할 수 있다고 판단한다. 예를 들어 다음과 같은 함수 (Fig. 2)
(42) 의 경우
입력변수 값 일 때, 다양한 진폭값( ) 을 사용 하여 제안한 방법으로 추정한 구배값과 해석적 구배값 을 비교 하여 그 오차를 다음 그림에 나타내었다.
실제는 미지의 함수에 대하여 적용하는 것이므로 참값과의 오
9 o, ,o o x y z
F a
z
∂ =
∂
F x ( ) x = x
oε
1ε
2x
1, , … x
2n[ ] [ a
1+ a
2x
1,
… a ,
1+ a
2x
2n] [ F x ( ) … F x
1, , ( )
2n]
( )
22
1 1 2
1
1 ( )
4
n
i i
i
J F x a a x
n
== ∑ ⎡ ⎣ − + ⎤ ⎦
3 2
( ) 0.05 007 2.25 1 F x = x − x + x +
x = 3 10
–3∼ 10
1Fig. 1. The amplitudes of the input perturbations and the estimated
gradients
Fig. 2. A Function F(x) in eq.(42) used for verifying the effect of the perturbation amplitude
Fig. 3. Error of the estimated gradient with respect to the pertur-
bation amplitude
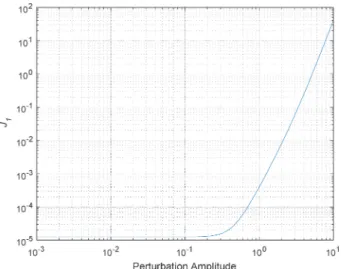
차를 구할 수 없고, 대신 동일한 조건에서 앞서 정의한 지수값 J
1( 식41)을 구한 결과는 다음 그림과 같다.
물론 다양한 조건에 따라 그 결과가 다를 수 있으나, 위의 경 우 Fig. 3과 Fig. 4를 비교하면 제안한 지수 값이 좀 더 보수적 인 특성을 나타내며, 이 지수값으로부터 선정한 진폭 값을 사용 하여 추정한 구배값의 신뢰도를 판정할 수 있을 것으로 판단한 다. 두 개 입력 변수의 경우에도 단일 입력 변수의 경우와 유사 하게 다음과 같이 지수를 정의하여 사용하며, 그 이외 다변수의 경우도 마찬가지 방법을 사용할 수 있다.
(43)
4. 섭동 신호의 주파수
앞 장까지 서술한 섭동 입력을 이용한 함수의 구배값 추정은 시불변(time invariant) 함수에 대한 것이다. 그러나 시변(time
variant) 함수의 경우에도 같은 방법을 적용하기 위해서는 충분 히 짧은 시간내에 한 주기 섭동이 이루어져야 한다. 즉 섭동 주 파수에 대한 고찰은 함수의 시간에 대한 변화와 함께 이루어져 야 한다. 이를 위하여 섭동 입력에 대한 특성을 살펴보면 식(1) 과 같이 sin함수를 이용한 섭동의 경우에는 한 주기 동안 두 번 의 동일한 입력 값을 갖는 것을 알 수 있다.
Fig. 5 에 나타내었듯이 한 주기 동안 총 2n개의 섭동량들 중, 예를 들어 j번째와 (n−j)번째는 서로 같은 값을 갖고, 다른 예로 k번째와 (3n−k)번째의 경우 서로 같은 값을 갖는다. 만약 함수 가 단일 입력 x 및 시간 t의 함수인 이라고 가정하면, 다 음 그림과 같이 j번째와 번째 동일한 입력에 대하여도 해 당 함수값이 다를 수 있다.
시변함수에 대하여 본 논문에서 제안하는 방법의 유효성을 검 증하는 방법은 동일한 두 개의 섭동입력에 대한 함수값 차이를 확 인하는 것이다. 즉, 범위에서는 i번째와 번째 동일한 입력에 대한 함수 값의 차이, 그리고 범위에서는 i번째와 번째 동일한 입력에 대한 함수 값의 차이를 계산 한다. 한편 두 동일한 값 사이의 시간차이가 일정하지 않으며, 짧 은 시간 동안 변화량과 긴 시간 동안 변화량이 만약 그 크기가 같 더라도 짧은 시간 동안 변화가 더 큰 함수 변화를 의미하므로, 이 시간차이를 선형 가중치로 사용하여 다음과 같이 지수를 정의한다.
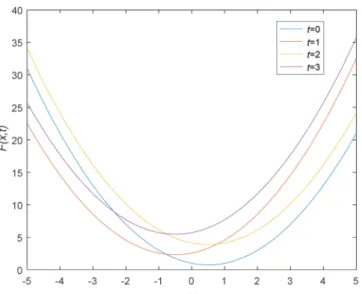
(44) 이를 검증하기 위하여 다음과 같은 시변 함수를 예로 설정하였다.
(45) 이 함수의 입력 변수 x와 시간 t 따른 함수의 변화를 다음 그 림에 예시하였다.
( )
22
2 3 4 5
1
1 ( , )
4
n
i i i i
i
J F x y a a x a y
n
== ∑ ⎡ ⎣ − + + ⎤ ⎦
F x t ( ) , n j –
( )
1 i n 1 ≤ ≤ – ( n i – ) n i 2n ≤ ≤ 3n i –
( )
[ ]
[ ]
[ ]
1 2
2
1
32 1 2
3
2 1
2 2
( ) ( ) 1
4 2
( ) ( ) 1
4 3 2
( ) ( ) 1
4
n
i n i
t i
n
i n i
i n
n n
F x F x
J n n i
F x F x
n n i
F x F x
n n
−
−
=
−
−
= +
= −
− + −
− + −
∑
∑
( ) ( , 1 sin(2 ) )
2cos(5 ) 0.5 1
F x t = − π t x − π t x + π t + Fig. 4. Index (J
1) values with respect to the perturbation amplitude
Fig. 5. Examples of the matching inputs during one period of per- turbation; j
thand ( n-j)
thinputs in the first half and k
thand ( 3n- k)
thinputs in the second half of the period.
Fig. 6. Input perturbation to the time varying function
구배값을 추정하고자 하는 입력 변수 x값이 2일 때 시간 t에 따른 함수의 변화는 다음 그림과 같다.
Fig. 9 는 입력변수 값 일 때, 다양한 주파수값 (
[rad/sec])을 사용하여 식(44)에 기술한 지수값 를 나타낸다.
이 결과를 보면 섭동 과정에서 지속적으로 변화하는 함수 특 성으로 인하여 섭동 주파수가 높아짐에 따라 제안한 지수 값이 단조적으로 감소하는 것은 아니나, 높은 주파수의 섭동입력이 시변함수의 변화로 인한 오차가 작다는 것을 분명히 보여준다.
또한 설정한 섭동 주파수의 상대적 유효성을 지수값에 근거하 여 판정 가능하다.
5. 결 론
측정량의 구배값은 세포의 움직임부터 동물의 먹이를 찾는 과 정, 철새들의 이동경로를 찾는 과정 등에 사용되는 것으로 밝혀 진 매우 중요한 정보이다. 본 논문에서는 단순 측정 센서값들을 이용하여 구배값을 구하기 위하여, 입력에 섭동신호를 추가하는 방법을 제안하여 이를 이산시스템에 대하여 적용하였다. 단일 입력 함수뿐만 아니라 다수 입력의 경우에도 서로 직교하는 섭 동 신호를 사용하면 한 주기 측정만으로도 각 입력에 대한 구 배값을 추정할 수 있음을 증명하였다. 섭동함수의 주요 진폭 및 주파수에 따른 추정 정확도를 정량화 하기 위한 지수를 각각 제 안하였으며 이의 유효성을 검증하였다. 이러한 섭동 입력을 이 용한 구배값 추정은 이동 로봇의 경로 생성이나 센서네트워크 의 노드 배치 등 다양한 분야에 활용될 수 있다.
감사의 글
이 연구는 2017년도 정부(교육부)의 재원으로 한국연구재단 의 지원을 받아 수행된 기초연구사업임(No. 2017R1D1A1B03034938)
REFERENCES