SVM 과 신경회로망을 이용한 비선형시스템의 고장감지와 분류방법 연구
A Study on a Fault Detection and Isolation Method of Nonlinear Systems using SVM and Neural Network
이 인 수*, 조 정 환, 서 해 문, 남 윤 석
(In Soo Lee
1, Jung Hwan Cho
2, Hae Moon Seo
3, and Yoon Seok Nam
4)
1Kyungpook National University
2University of Massachusetts Lowell
3Korea Electronics Technology Institute
4Dongguk University
Abstract: In this paper, we propose a fault diagnosis method using artificial neural network and SVM (Support Vector Machine) to detect and isolate faults in the nonlinear systems. The proposed algorithm consists of two main parts: fault detection through threshold testing using a artificial neural network and fault isolation by SVM fault classifier. In the proposed method a fault is detected when the errors between the actual system output and the artificial neural network nominal system output cross a predetermined threshold. Once a fault in the nonlinear system is detected the SVM fault classifier isolates the fault. The computer simulation results demonstrate the effectiveness of the proposed SVM and artificial neural network based fault diagnosis method.
Keywords: fault detection, fault islolation, SVM, artificial neural network, nonlinear system
Copyright© ICROS 2012
I. 서론
제어시스템의 신뢰성 및 안전성 확보를 위해서는 시스템 에서 발생하는 고장을 조기에 감지하고 분류할 수 있는 고 장진단시스템의 개발이 절대적으로 필요하다. 이는 시스템 에서의 고장은 생산성의 저하를 초래할 뿐만 아니라 심지 어는 사람의 생명까지도 위협할 정도로 파급효과가 크기 때문이다.
기존에 연구된 고장진단방법은 크게 모델에 기반한 방법 과 모델에 기반하지 않는 방법으로 분류할 수 있다. 먼저, 모델에 기반한 방법에서는 고장진단을 위해서 시스템의 정 확한 정량적모델을 필요로 하므로 불확실성이 존재하고 비 선형성이 강한 시스템에는 적용이 어렵다는 문제점이 있다 [1-3].
이에 반해서 모델에 근거하지 않는 방법은 대상 시스템 의 측정치, 경험 또는 물리적 검토를 기초로 하며, 한계치 검사, 전문가 시스템 기법 및 신경회로망 이용 방법[4,5]등 이 있다. 신경회로망을 이용한 대부분의 연구에서는 사전에
* 책임저자(Corresponding Author)
논문접수: 2012. 4. 30., 수정: 2012. 5. 17., 채택확정: 2012. 5. 22.
이인수: 경북대학교 산업전자공학과([email protected]) 조정환: 미국 매사추세츠 로웰대학교 도시환경공학과 Post doc.
서해문: 전자부품연구원 선임연구원([email protected]) 남윤석: 동국대학교 경주캠퍼스 정보통신공학과 교수 ([email protected])
※ 이 논문은 2012 제 27회 ICROS 학술대회에 초안이 발표되었음.
발생이 가능한 모든 고장을 미리 예측하여 신경회로망 고 장모델로 구축하고 고장이 발생하면 미리 구축한 고장모델 중에서 가장 유사한 고장모델을 선택하여 고장을 분류한다.
그러나 사전에 모든 고장에 대한 모델을 구축하는 것은 매 우 어렵다는 단점이 있다. 이에 대한 해결책으로서 ART (Adaptive Resonance Theory) 신경회로망을 이용하는 연구가 있었다[5,6]. 그러나 참고문헌 [6]에서는 선형시스템의 고장 진단방법에 관한 연구결과를 제시했으며, 참고문헌 [7]에서 제시한 방법은 신경회로망 다중모델을 이용한 비선형시스 템의 고장진단방법으로서 고장의 분류를 위해서는 다중고 장모델을 정확하게 구축해야 한다는 문제점이 있었다.
최근에는 Vapnik [8]에 의해 개발된 통계적 학습이론을 기반으로 하는 SVM (Support Vector Machine)을 필기체 숫 자인식 뿐만 아니라 유도전동기의 고장진단에 이용하는 연 구결과들이 발표된 바 있다[9-12].
본 논문에서는 비선형시스템에서 발생하는 고장을 감지
하고 분류하기 위해 인공신경회로망과 SVM을 이용한 고장
감지 및 분류 방법을 제안한다[13]. 제안한 고장진단 알고
리듬은 고장감지부 및 고장분류부로 구성된다. 즉, 고장감
지부에서는 시스템의 출력과 다층신경회로망 공칭모델 출
력과의 오차가 미리 설정한 문턱값을 넘으면 비선형시스템
에서 발생된 고장을 감지한다[7]. 일단 고장이 감지되면 시
스템에서 발생한 고장의 종류를 알아내기기 위해 미리 설
정한 분류윈도우내에서의 출력데이타를 획득한다. 다음으로
획득한 시스템출력과 SVM 고장분류기를 이용하여 시스템
에서 발생한 고장의 종류를 분류한다.
고장진단
신경회로망 공칭모델
고장감지
비선형 시스템
오 차
SVM
고장분류기분류를 위한 윈도우 내의 데이타 수집
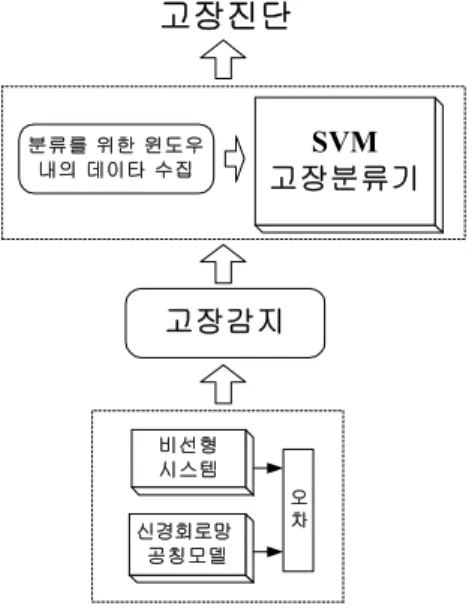
그림 1. 제안한 고장진단방법의 구조도.
Fig. 1. Structure of the proposed fault diagnosis method.
II. 제안한 고장감지 및 분류방법
제안한 고장진단시스템은 그림 1과 같이 비선형시스템에 서 발생하는 고장을 감지하기위한 고장감지부와 발생한 고 장의 종류를 분류하기위한 고장분류부로 이루어져 있다.
즉, 다층신경회로망과 문턱값 비교방법에 의해서 고장을 감 지하면 고장분류를 위해 설정한 분류윈도우내에서의 출력 데이타를 획득하며 이를 이용하여 SVM 고장분류기에 의해 발생한 고장의 종류를 분류한다.
1. 신경회로망을 이용한 고장감지
고장진단을 위한 대상 시스템은 아래와 같은 이산시간 비선형시스템으로 가정한다.
⋯
⋯ (1) 여기서 , 는 각각 시스템의 입력과 출력, ⋅
의 비선형함수이며, 는 백색 잡음이라고 가정한다.
본 논문에서는 고장감지를 위해 그림 2와 같은 다층 신 경회로망을 이용하여 비선형시스템의 공칭모델을 구축한다.
사용한 다층 신경회로망은 입력층, 중간층과 출력층으로 이 루어져 있으며 신경회로망의 학습을 위해서는 일반적으로 많이 이용되는 역전파(back-propagation) 알고리듬을 이용하 였다[14]. 최소화해야 할 성능지수 및 출력오차를 각각 아 래와 같이 정의하며 식 (2)를 최소화하는 방향으로 신경회 로망을 학습하여 고장감지를 위한 공칭모델을 구축한다.
(2)
(3) 여기서
은 신경회로망 공칭모델의 출력이다.
본 논문에서는 실제 시스템 출력과 신경회로망 공칭모델 출력과의 오차를 계산하며, 윈도우 내에서의 오차가 다음과 같은 조건을 만족하면 고장이 발생된 것으로 인식한다.
Oj
Input layer Hidden layer Output layer Oi
O1
wji wkj
그림 2. 다층 신경회로망의 구조도.
Fig. 2. Architecture of the multilayer neural network.
>
δf(4)
여기서
는 식 (3)과 같이 시스템 출력과 신경회로망 공칭모델 출력과의 오차이고,
는 고장감지를 위한 문턱 값, L 은 윈도우 크기이다. 공칭모델이 충분히 학습되었다 면 시스템 출력과 공칭모델 출력사이의 오차는 시스템 잡 음과 거의 같은 성질을 가진다[15]. 따라서 시스템 출력과 공칭모델 출력사이의 오차
은 정규분포
를 따 르므로 윈도우내에서의
개의 정규화된 자승오차
의 합은 아래와 같이 자유도가
인
(chi- square) 분포 를 따르게 된다.
~
(5)
본 연구에서는 고장감지를 위한 문턱값
를 허위고장 신호 발생확률을 최대한 줄이는 방향으로 설정한다. 즉, 시 스템이 정상일 때 허위고장신호 발생확률의 허용한계를 라고 하면
Pr
○ (6)
이므로
분포표로부터 상수
○를 구한 뒤 이로부터 고장
감지를 위한 문턱값
○를 구한다. 그러나 고장으
로 인한 시스템 파라미터 변화가 작은 시스템의 경우에는
위에서 구한
가 너무 커서 실제 고장에 의한 시스템 파
라미터의 변화를 감지하지 못하는 경우가 발생할 수도 있
으므로, 통계적 방법에 의해서 구한
를 기준값으로 해서
경험적 요소를 고려하여 고장감지 문턱값을 적절하게 선정
할 필요가 있다.
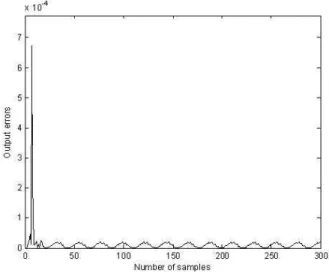
그림 4. 시스템출력과 신경회로망 공칭모델출력과의 오차.
Fig. 4. Errors between system output and neural network nominal model output.
Margin
Class 1
Class 2
Support Vectors
Optomal seperating hyperplane