AdaBoost 알고리즘을 이용한 얼굴인식 및 선박용 감시로봇 개발
Face Recognition using AdaBoost Algorithm and Development of Surveillance Robot for a Ship
고 석 조
†, 박 장 식
1, 장 용 석
2, 최 문 호
2Seok Jo Go
†, Jang Sik Park
1, Yong Seok Jang
2, Moon Ho Choi
2Abstract
This study developed a surveillance robot for a ship. The developed robot consists of ultrasonic sensors, an actuator, a lighting fixture and a camera. The ultrasonic sensors are used to avoid collision with obstacles in the environment. The actuator is a servo motor system. The developed robot has four drive wheels for driving. The lighting fixture is used to guide the robot in a dark environment. To transmit an image, a camera with a pan moving and a tilt moving is equipped on the upper part of the robot. AdaBoost algorithm trained with 15 features, is used for face recognition. In order to evaluate the face recognition of the developed robot, experiments were performed.
Keywords:
AdaBoost Algorithm, Face Recognition, Lighting fixture, Surveillance Robot for a ship, Ultrasonic sensor
1. 서 론
1)20세기 후반 제조업 현장에 투입되기 시작한 로봇은 현재까지 산업용 로봇이 주류를 이루고 있으며, 최근에 는 로봇산업의 선진기술을 보유한 미국, 일본 등을 중심 으로 인간생활과 밀접한 서비스 로봇의 개발이 활발하 게 진행되고 있다. 1980년대 말부터 생산현장에 본격적 으로 투입된 우리나라의 로봇산업은 2005년 보유대수에 서는 세계 시장에서 4위, 판매대수로는 3위 규모를 나타 내고 있다[1,2]. 그러나 조선 해양 분야에서의 로봇 산업 은 육상에 비교해서는 부분적으로 연구 개발이 이루어 지고 있다[3]. 특히 대부분의 로봇관련 기술이 육상에서 의 사용을 목적으로 하여 개발되어 왔으므로 선박의 특 수한 환경을 고려하지 못했고, 해상의 경우 육상에 비해 그 수요가 크지 않아 기술 개발이 어려웠다. 반면에 국 내조선시장은 세계 선박 발주량의 40%이상을 차지하며 사상 최대의 수주 실적을 올리고 있는 등 국가 발전 원 동력으로서 일익을 담당하고 있다. 그러나 근래에 들어
† 교신저자:동의과학대학 컴퓨터응용기계계열 (E-mail : [email protected])
1 동의과학대학 디지털전자과(E-mail : [email protected])
2 (주)마르센(E-mail : [email protected])
유조선, 벌크 화물선 및 중소형 컨테이너선 등을 필두로 하여 선박 시장에서 중국을 비롯한 후발 국가들의 추격 이 거세져 수익성 확보가 힘들어지고 있다. 이러한 상황 에 맞추어 육상을 위주로 분산되어져 있는 로봇 기술들 을 선박의 특수한 환경과 연계시켜 접목할 필요가 있다.
본 연구에서는 선박 환경에서 외부 방문자에 대한 인 식과 감시 기능을 갖춘 선박용 감시 로봇을 개발하고자 한다. 선박용임을 고려하여 로봇의 전체 구성은 크게 장 애물의 유무와 로봇 본체의 기울기를 감지하는 감지부, 감지된 데이터를 분석하고 동작 장치에 명령을 전달하 는 제어부, 제어 장치를 통해서 내려진 명령을 수행하는 동작부로 구성하였다. 그리고 로봇의 감시기능 구현을 위한 무선 영상 전송 및 원격 제어 그리고 외부 방문자 에 대한 얼굴인식 알고리즘을 개발하고자 한다. 얼굴인 식을 위해서는 AdaBoost 알고리즘을 이용한 얼굴 검출 프로그램을 개발하고자 한다.
2. 선박용 감시 로봇 시스템 2.1 로봇의 전체 구성
본 연구에서 개발하고자 하는 로봇은 장애물 감지 센
서부와 로봇 본체의 기울기를 감지하는 감지부, 감지된 데이터를 분석하고 동작 장치에 명령을 전달하는 제어 부, 제어 장치를 통해서 내려진 명령을 수행하는 동작부, 원격지 영상을 전송하는 영상 전송부로 구성되어 있다.
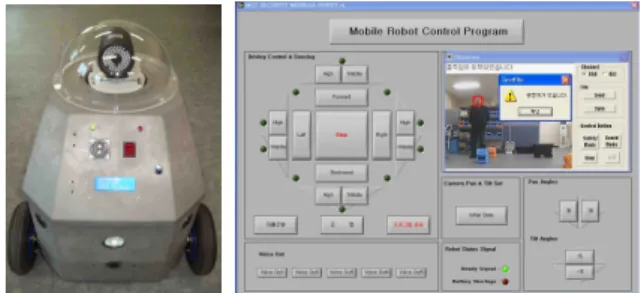
그림 1은 본 연구에서 개발한 로봇의 외형과 모니터링 프로그램을 나타낸다.
그림 1. The developed Surveillance robot for a ship
2.2 로봇 구동부
이동용 로봇의 구동방식은 크게 wheeled vehicle과 legged vehicle로 구분할 수 있다. Wheeled vehicle은 비 교적 구조가 간단하며, 운동거리에 대한 에너지 손실이 적으며 로봇이 지표면에 닿는 영역 내에 로봇의 무게중 심이 있기 때문에 비교적 안정하다. 그러나 wheeled vehicle은 비교적 평탄한 면이나 딱딱한 지면에서만 이 동이 가능하며 거친 지형에서 이동할 수 있게 하기 위해 서는 바퀴를 크게 할 필요가 있다. 이에 비해 legged vehicle은 구조가 복잡하여 제어가 어렵고, 운동거리에 대한 에너지 손실이 wheeled vehicle에 비해 크지만, 복 잡한 지형에서도 이동이 가능하다[4,5].
이러한 로봇 구동 방식의 특성 및 선박 환경을 고려 해서 본 연구에서는 wheeled vehicle 방식의 구동부를 개발하였다. 로봇의 안정성, 선체에서의 등판능력 등을 고려하여 구동부는 그림 2와 같은 구조로 설계하였으며
모터
감속기
바퀴
베어링홀드 & 베어링
샤프트 커플링
그림 2. Wheel part of the surveillance robot
4축으로 구성하여 각각의 바퀴별로 구동이 가능하도록 설계하였다. 그림 3은 로봇의 하부에 있는 구동부를 나 타낸다.
개별 구동부에 적용한 DC 모터는 DC 24 V, 2800 rpm, 60 W의 모터를 사용하였다. 그리고 구동 토크의 증대 및 고속 이동으로 인한 로봇의 불안전 요소를 제거 하기 위하여 1:100의 감속기를 설계하여 DC 모터에 연 결하여 사용하였으며 각각의 DC 모터는 2.1 kgf․cm의 토크에서 최대 100 kgf․cm의 토크를 발생하도록 설계 하였다. 로봇의 구동 바퀴로 사용하고 있는 에어 바퀴는 직경이 200 mm, 폭은 50 mm로 바퀴 당 70 kg의 적재중 량을 견딜 수 있으며 4개의 바퀴를 설치함으로써 적절 한 무게의 분산 시에는 최대 280 kg의 중량을 견딜 수 있도록 하여 로봇의 확장성을 고려하였다.
로봇의 이동속도는 PWM 출력에 따른 모터 제어를 이용하여 표 1과 같이 3단 가변형태로 설계하여 이동성 을 확보하였다.
그림 3. Lower body of the robot
표 1. Velocity of the robot
High Middle Low Speed (km/h) 0.76 0.57 0.42
2.3 로봇 외관부
로봇의 외관부를 제작하는데 있어서는 선박환경에서 사용 가능한 구조로 제작하는 것에 주안점을 두었으며 해수에 강한 재질의 사용, 예상치 못한 해수의 침입에 대한 방책 등을 감안하여 SUS316재질을 사용하여 설계 하였다. 그리고 구동부를 위한 하판, 메인 보드(main board) 및 로봇 제어를 위한 중판, 로봇의 상태 관찰 및 카메라 부착 등을 위한 상판으로 나누어 설계하였다. 로 봇의 형상은 그림 1과 같이 전체적으로 직사각형의 형 태를 하고 있으며 전후 이동 시 전후방의 장애물 감지를
위하여 몸체는 8각형으로 제작하여 대각선에 위치한 장 애물 감지능력을 확보하였다. 4륜 구동의 성능 확보를 위하여 로봇의 크기가 다소 커졌으며 로봇의 무게는 60 kg으로 설계되었다.
2.4 선체 접착 장치
선박에 사용될 로봇의 안전성을 추구하기 위하여 선 박의 기울어짐(rolling, tilt)을 고려하여 선박이 앞뒤
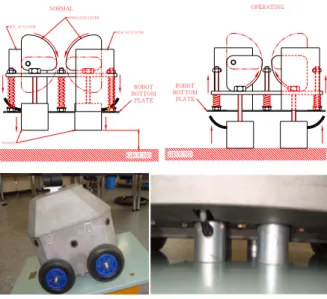
±10°, 좌우 ±10° 기울기가 발생했을 경우 선체에 로봇의 본체가 고정되도록 설계를 하였다. 즉, 그림 4와 같이 로 봇 내부에 장착되어진 기울기 센서의 출력포트전압을 측정하여 ±10° 이상에서는 로봇이 이동을 멈추고 로봇 의 본체가 선체에 이탈하지 않도록 로봇 하판에 설치되 어져 있는 전자석이 동작을 개시하도록 하였다. 기울기 센서는 선체의 앞뒤, 좌우의 기울기를 판정하기 위하여 그림 5와 같이 2조의 기울기 센서를 상호 90°의 구조로 설치하였다.
로봇의 선체 접착을 위한 기계구조 개발에서는 전자 석을 초기에는 2개를 설치하였지만 30° 이상 기울어질 경우 로봇의 무게로 미끄러짐이 발생하였다. 따라서 로 봇의 안정성 확보를 위해 총 4개의 전자석을 사용하였 으며, 개당 30 kgf의 흡착력으로 최대 120 kgf의 흡착력 을 가지도록 설계하였다. 그림 6은 전자석이 동작하는 과정과 접착 실험 모습을 나타낸다.
그림 4. Output voltage at each slope
그림 5. Tilt sensor(inclinometer)
28.5
ELE. ACTUATOR
ELE. ACTUATOR OPERATING LEVER
MAGNET
NORMAL
GROUND ROBOT BOTTOM
PLATE
OPERATING
GROUND ROBOT BOTTOM
PLATE
그림 6. Electromagnet part
3. 장애물 감지용 센서의 선정
본 연구에서는 로봇의 외부 장애물 감지를 위한 센서 의 선정을 위해서 IR센서, 근접센서와 초음파센서에 대 한 성능평가 및 적용 시험을 수행하여 선박용 로봇에 적 합한 센서를 선정하고자 하였다.
3.1 직접반사형 IR센서
로봇의 외부 장애물 감지를 위해 직접반사형 IR센서 인 Autonics사의 BA2M-DDT를 선정하여 그림 7과 같이 로봇에 설치하였다. 센서는 로봇의 전후방으로의 이동시 안정성을 확보하기 위하여 로봇의 측면에 4개, 모서리면 에 4개, 전후면에 2개, 총 10개를 설치하였다.
로봇의 장애물 감지 실험은 표 2와 같이 실험실 실내, 선박 CCR(cargo control room), 선박 ECR(engine control room), 일반 사무실 내에서 로봇의 이동 시험을 실시하 였다. 일반 사무실 내부에서 자율이동 실험 시 로봇이
근접센서 근접센서 근접센서 근접센서
그림 7. IR Sensor
표 2. BA2M-DDT IR Sensor
실험장소 실험실 선박 CCR 선박 ECR 일반 사무실
주행결과 성공 성공 성공 충돌발생
사무기기와의 충돌이 발생하였다. 이것은 IR센서 특성에 따라 어두운 색상인 경우 센서의 발광이 반사되지 못하 고 흡수되어 짙은색의 사무기기와의 충돌이 발생하였다.
3.2 정전용량식 근접센서
근접센서를 사용하였을 경우 IR센서에서와 같이 물체 검출 시 검출 물체의 재질에 따라 감지성능이 좌우되어 물체감지 성능의 신뢰성에 문제가 되었다.
3.3 초음파센서
본 연구에서는 IR센서, 근접센서, 초음파센서에 대한 평가실험을 통해 3가지 센서에 대한 결과를 표 3과 같이 얻었으며 실험 결과를 통해 로봇의 외부 장애물 감지를 위해서는 초음파센서로 최종 선정하였다. 선정된 초음파 센서의 사양은 표 4와 같다.
초음파센서를 로봇에 적용 시 초음파센서의 감지되는 영역이 수평방향에서 110°, 수직방향에서 50°로 비교적 넓은 영역을 감지할 수 있다. 그러나 각각의 초음파 센 서에서 발생되어진 초음파로 인접한 초음파센서에 간섭 이 발생하였고 로봇 이동 시 모터에서 발생되는 고주파 잡음이 초음파센서에 영향을 주는 문제가 있었다. 초음 파의 수평/수직의 지향성은 각도와 음압레벨과의 관계로 결정되어 짐으로 본 연구에서는 그림 8과 같이 초음파 센서의 음파 발생 영역을 0.25 m, 25°로 조절함으로써
표 3. Performance evaluation of Sensors
IR Sensor 근접센서 초음파센서
물체감지 영역 적합 부적합 적합
감지물체 재질 적합 부적합 적합
감지물체 색상 부적합 적합 적합
감지물체 크기 적합 적합 적합
로봇내부 설치성 적합 적합 적합
물체감지 신뢰성 적합 부적합 적합
표 4. Specfications of an ultrasonic sensor
Model STMA-507
Nominal Frequency[kHz] 40 Detectable Range[meter] 0.3 ~ 2
Directivity[degree] 110(Horizontal) 50(Vertical) ± 10%
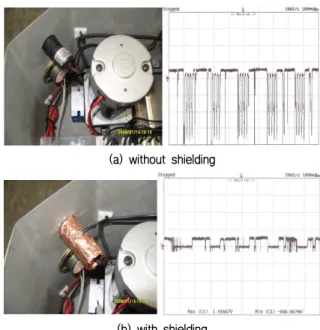
센서 간의 간섭 문제를 해결하였다. 그리고 로봇 이동 시 모터에서 발생되는 고주파 잡음 문제는 그림 9와 같 이 초음파센서의 하우징을 동박으로 감싸고 로봇의 본 체와 접지시킴으로써 잡음 문제를 해결할 수 있었다.
그림 8. Response characteristic of ultrasonic sensor
(a) without shielding
(b) with shielding
그림 9. Output signal of an ultrasonic sensor
4. 원격 영상 전송
원격 영상 전송 시에는 이동 로봇의 운동 제어를 위 한 무선 데이터 통신과 무선으로 영상을 전송하기 위한 전송 주파수의 간섭으로 그림 10과 같이 신호 잡음이 발 생하였다. 따라서 본 연구에서는 로봇의 운동 제어 전송 모듈과 영상 전송 모듈의 전송 주파수를 달리하도록 영 상 전송 장치를 RFVISION社의 RF-A5805 Tx, RF-5805 Rx로 선정하여 적용하였으며 개선된 영상은 그림 11과 같다. 그리고 야간 활동에 대한 부분을 고려하여 로봇의 조명 기능이외에 적외선 기능이 포함된 카메라를 장착
하여 설계하였다. 그림 12는 적외선 카메라의 외형을 나 타내며 그림 13은 적외선 카메라에 의한 영상 전송 결과 이다.
그림 10. Image transmission at 2.4 GHz
그림 11. Image transmission at 5.8 GHz
그림 12. an infrared camera
그림 13. Image transmission using an infrared camera
5. 얼굴인식
외부 방문자에 대한 인식을 위해 원격지 카메라로부 터 획득된 영상에서 간단한 형태를 가지는 특징점들의 값을 바탕으로 화상에서의 얼굴특징을 분석하여 사람의 얼굴 유무를 판단하였다. 본 연구에서는 이러한 특징점 값을 이용한 얼굴 영상과 얼굴이 아닌 영상을 판독하기 위해 AdaBoost 알고리즘[6,7]을 이용하였다.
5.1 AdaBoost 알고리즘을 이용한 얼굴인식
그림 14와 같이 15가지 종류의 특징점들을 이용하여 얼굴을 검출하였다. 두 개의 사각형으로 구성된 특징점 의 값은 두 개의 사각형 영역내의 밝기 값들의 합의 차 이이다. 각각의 영역은 동일한 크기와 모양을 가진다.
세 개의 사각형으로 구성된 특징점의 값은 바깥쪽 두 개 의 사각형 영역내의 밝기 값의 합에서 가운데 사각형 영 역의 밝기 값의 합을 뺀 값이다. 그리고 네 개의 사각형 으로 구성된 특징점의 값은 대각선 방향의 두 쌍의 사각 형 영역의 밝기 값의 합의 차이이다.
5.2 얼굴인식 실험
얼굴인식에 대한 평가를 위해서 실선에서의 실험을 수 행하였다. 로봇은 그림 15와 같이 선박의 출입구(gangway)
(a) 모서리 사각형
(b) Line 사각형
(c) Center-Surround 사각형
(d) 대각 사각형 그림 14. Features
그림 15. Surveillance robot for a ship
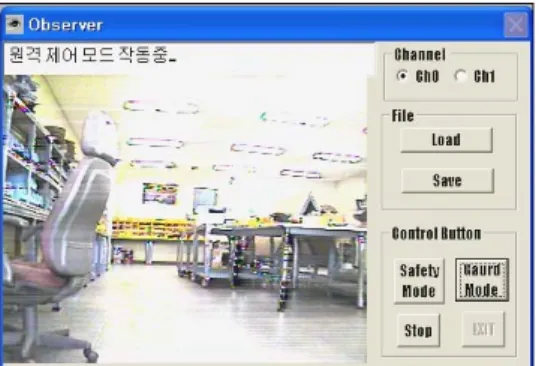
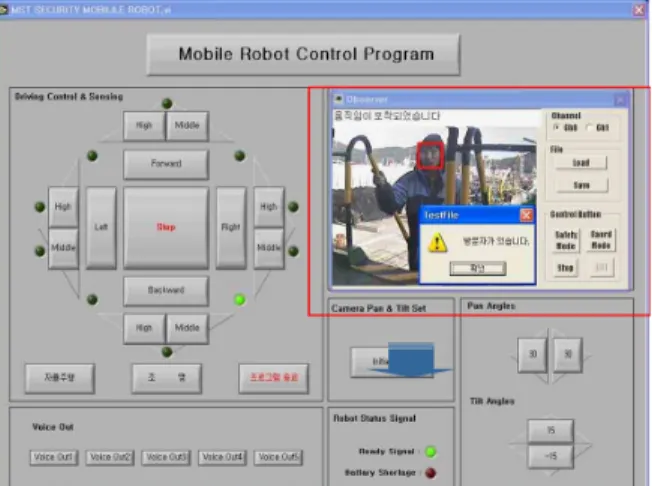
에 위치해서 방문자를 확인한다. 그림 16은 로봇으로부 터 전송된 영상으로부터 AdaBoost 알고리즘에 의해 얼 굴 인식 후 관리자에게 방문자가 있음을 알려주는 모습 을 나타낸다.
그림 16. Face recognition using AdaBoost algorithm
6. 결 론
본 연구에서는 선박 환경에서 외부 방문자에 대한 인 식과 감시 기능을 갖춘 선박용 감시 로봇을 개발하였다.
선박용임을 고려하여 로봇의 재질과 구동방식, 접지 기 능 등의 하드웨어적인 구조를 설계하였으며 로봇의 감 시기능 구현을 위한 무선 영상 전송 및 원격 제어 그리 고 방문자의 얼굴검출 기능을 구현 하였다. 본 연구에서 개발된 선박용 감시로봇을 이용함으로써 선박 접안 및 출항 시에는 로봇이 전송한 영상을 바탕으로 선체 전․
후면을 감시할 수 있으며 선박 항해 시에는 선박 ECR, CCR 감시 그리고 정박 시에는 외부 방문자에 대한 감 시 기능 등 활용범위의 확대로 해서 현재 실선에서 사용 하고 있는 CCTV에 대한 대체가 가능할 것으로 기대하 고 있다.
참 고 문 헌
[1] IFR, WORLD ROBOTICS 2006, 2006.
[2] Ministry of Commerce, Industry and Energy, Statistical Research of Robot Industry, 2006.
[3] H. S. Choi, K. K. Kim, D. H. Kim, H. S. Kang and J. N. Seo, "Development of a Remotely Operated Vehicle for Investigation the coastal sea," Proceedings
of the KSME 2007 Autumn Annual Meeting, pp.
125-128, 2007.
[4] K. S. Fu, R. C. Gonzalez and C. S. G. Lee, Robotics, Mc Grow Hill, 1987.
[5] P. J. McKerrow, Introduction to Robotics, Addison Wesley, 1993.
[6] Steven Abney, Robert E. Schapire, and Yoram Singer,
“Boosting applied to tagging and PP attachment,”
In Proceedings of the Joint SIGDAT Conference on
Empirical Methods in Natural Language Processing and Very Large Corpora, 1999.
[7] 김정현, 노태정, 김진영, 홍영진, 권장우, 강동중,
“영상처리 AdaBoost 기반의 실시간 고속 얼굴검출 및 추적시스템의 개발,” 제어․자동화․시스템공학 논문지, 제13권 제11호, pp. 1074-1081, 2007.
고 석 조
1994 부산대학교 기계공학과 (공학사)
1996 부산대학교 대학원 기계 공학과(공학석사) 2002 부산대학교 대학원 지능
기계공학과(공학박사) 2001~현재 동의과학대학 컴퓨터응용기계계열 부교수 관심분야 : 제어 및 자동화
박 장 식
1992 부산대학교 전자공학과 (공학사)
1994 부산대학교 대학원 전자 공학과(공학석사) 1999 부산대학교 대학원 전자
공학과(공학박사) 1997~현재 동의과학대학 디지털정보전자과 교수 관심분야 : 비디오 신호처리, 오디오 및 음성신호처
리, 적응신호처리, 영상 및 음성인식
장 용 석
1994 한국해양대학교 기관공 학(공학학사)
2005 (주)세일세레스 기술연 구소 선임연구원 2005~현재 (주)마르센 기술이사 관심분야 : 로봇제어
최 문 호
2002 동서대학교 전자공학과 (공학학사)
2006 부산대학교 전기공학전 공(공학석사)
2005~현재 (주)마르센 연구소장 관심분야 : 로봇제어