학 술 논 문
206
개방형 로봇 플랫폼 기반 미세수술로봇의 안전성 및 성능평가에 관한 연구
박준현
1· 호예지
1· 이덕희
1· 최재순
1,2*
1서울아산병원 아산생명과학연구원 의공학연구소, 2울산대학교 의과대학
A Study on Safety and Performance Evaluation of Micro - surgical Robots Based on Open Robot Platform
Junhyun Park
1, YeJi Ho
1, Duck Hee Lee
1and Jaesoon Choi
1,2*
1
Medical Engineering R&D Center, Asan Institute for Life Sciences, Asan Medical Center
2
College of Medicine, University of Ulsan
(Manuscript received 17 July 2019 ; revised 4 September 2019 ; accepted 1 October 2019)
Abstract: Surgical methods and associated precision systems have been developed, but surgical procedures that require precise location and fine manipulation of the lesion remain a limitation. The combination of precision robot manipulation technology and 3D medical image navigation technology overcomes the limitations of minimally inva- sive surgery (MIS) and enables a more stable and successful operation. Surgical robots are surgical robots such as da Vince, and surgical robots using industrial robotic arms. There are various developments and researches of medical robots. In recent medical robot development, a new type of surgical robot based on an industrial robot arm capable of easily replacing the end effector according to the user’s needs is being actively developed at home and abroad.
Therefore, in this study, we developed safety and performance evaluation guideline for micro - surgical robots based on open robot platform using general purpose robot arm to help quality control of the medical device.
Key words: Minimally invasive surgery, Advanced medical devices, Micro-surgical robots
I. 서 론
수술 방법 및 관련 정밀 시스템이 개발되고 있다. 하지만 환부의 정확한 위치선정과 미세한 조작이 필요한 수술은 아 직까지 추가적인 기술 개발의 여지가 많이 남아 있다. 정밀 한 로봇조작기술과 3D 의료영상 내비게이션 기술의 접목은 최소침습수술(MIS, Minimally invasive surgery)의 효과를 더욱 높이고 보다 안정적이고 성공적인 수술을 가능하게 할 수 있다[1-3]. 수술용 로봇은 기존의 상용화된 수술로봇과 같은 전용 플랫폼 기반의 로봇과 최근 등장하고 있는 범용
로봇팔을 기반으로 시스템 상 구분할 수 있다. 범용 로봇팔을 사용하는 수술로봇은 End-effecter를 사용자의 필요에 따 라 용이하게 새로이 개발 및 적용할 수 있으므로 보다 자유 로운 기술 발전 가능성이 높다고 할 수 있다. 국내에서 현 재 개발 중인 미세수술로봇의 경우, 범용 로봇팔을 기반으 로 하고, 수술 도구인 카테터의 굴곡 조향을 위해 전용으로 개발된 로봇 End-effecter에 고화질 카메라, 광섬유 조명 채 널, tool channel이 조합되어 있고, 이를 통해 사용 가능한 EN(Epiduroscopic Neuroplasty) 카테터와 6축 haptic 마 스터 장치로 구성되어있다. X선 영상을 통해 EN 카테터의 삽입 경로를 안내하는 navigation system과 시술 훈련을 위한 시뮬레이터 또한 개발 중에 있다. 국외에서도 Medtronic 이 개발 중인 수술로봇, CMR Surgical의 최근 상용화한 수 술로봇 등의 경우에서 범용 로봇팔 기술 기반의 수술로봇 형태가 나타나고 있다[1]. 따라서 개방형 로봇 플랫폼 기반 미세수술로봇에 적용할 수 있는 성능 및 안전성 가이드라인 Corresponding Author : Jaesoon Choi
88, Olympic-ro 43-gil, Songpa-gu, Seoul, Republic of Korea Tel : +82-2-3010-2092
E-mail : [email protected]
본 연구는 2019년도 식품의약품안전처의 연구개발비(17172의평연
370) 로 수행되었으며 이에 감사드립니다.
207 을 조사·분석하고자 하며, 사용목적 및 대상에 따라 명확한
품목분류 기준을 제시하고 해당 품목에 대한 안전성 및 성 능평가 가이드라인을 마련하여 의료기기의 품질관리에 도움 을 주고자 한다.
II. 연구 방법
1. 개방형 로봇 플랫폼 기반 미세수술로봇의 국내·외 품목 분 류 및 제조·수입업체 현황, 허가 현황 조사
개방형 로봇 플랫폼 기반 미세수술로봇의 품목 분류 현황을 조사하기 위하여 식품의약품안전처 고시 제 2018-15호 “의 료기기 품목 및 품목별 등급에 관한 규정”을 분석하였다. 또 한 미국, 유럽, 중국, 일본을 조사하여 개방형 로봇 플랫폼 기반 미세수술로봇의 국내·외 등급 및 품목분류 현황을 비 교분석 하였다. 품목 분류 이외에도 제조 및 수입업체의 신 고, 허가 및 인증 현황을 품목별로 조사하였다.
2. 국내·외 개방형 로봇 플랫폼 기반 미세수술로봇 안전성 및 성능평가 관련 기준규격 조사
개방형 로봇 플랫폼 기반 미세수술로봇의 안전성 및 성능 평가에 적용 가능한 평가 항목을 도출하기 위하여 국내·외 규격을 분석하였다. 안전성과 성능평가에 적용가능한 평가 항목 조사하기 위해 식품의약품안처고시 가이드라인, 국제 표준화기구(International Organization for Standardization, ISO), 국제전기기술위원회(International Electrotechnical Commission, IEC), PMDA 가이드라인을 분석하였다.
3. 로봇 플랫폼 기반 미세수술로봇에 적용가능한 안전성 및 성능평가 항목 및 시험
개방형 로봇 플랫폼 기반 미세수술로봇에 적용될 시험방 법을 선정하여 정확성 및 명확성을 고찰하였다. 또한 관련 전문가들의 의견을 반영하여 안전성 및 성능평가를 위한 항 목과 평가방법을 검증하였다. 시험평가 검증을 위하여 사용된
장비는 산업용 로봇팔인 UR10 (Universal robots, Denmark) 에 6축 Force/Torque Sensor인 Axia 80 (ATI, INC, USA)를 적용하여 측정하였다.
III. 연구 결과
1. 개방형 로봇 플랫폼 기반 미세수술로봇의 국내·외 품목 분 류 현황
1.1 국내 분류체계 현황
개방형 로봇 플랫폼 기반 미세수술로봇은 「의료기기 품 목 및 품목별 등급에 관한 규정」에 의해 A67000 정형 및 기능 회복용 기구(Medical device for orthopedics and restoration) 에서 자동화시스템로봇수술기(3)로 분류되어 있다.
1.2 국외 분류체계 현황
미국은 의도한 목적에 따라 Class I, Class IIa, Class IIb, Class IIIa, Class IIIb, Class IV 로 분류하며, 21 CFR(Code of Federal Regulations) 에 따라 개방형 로봇 플랫폼 기반 미세수술로봇에 사용되는 에너지원인 고주파 및 레이저를 적용하였다.
유럽은 MDR(Medical Device Regulation) 부속서 8 (ANNEX VIII) 분류 체계에 따르며, 수술로봇에 관한 내 용은 없으며 고주파 및 레이저 수술관련 기기에 대하여 분 류하고 있다. 고주파 및 레이저 수술관련 기기는 사용목적에 따라 Class IIa, Class IIb, Class III로 분류되고 있으며 로봇 플랫폼 기반 미세수술로봇은 에너지의 성질, 종도 및 적용 부위를 고려할 때 기기의 특성이 잠재적으로 위험한 방법으로 인체로 또는 인체로부터 에너지를 투입 또는 교환 하도록 의도된 기기에 해당하여 Class IIb로 분류된다.
일본 PMDA는 개방형 로봇 플랫폼 기반 미세수술로봇 관련 기기 등급 및 적용 규격은 고주파 및 레이저기기에 대하여 등급분류를 하고 있으며 사용목적에 따라 ClassII와 ClassIII
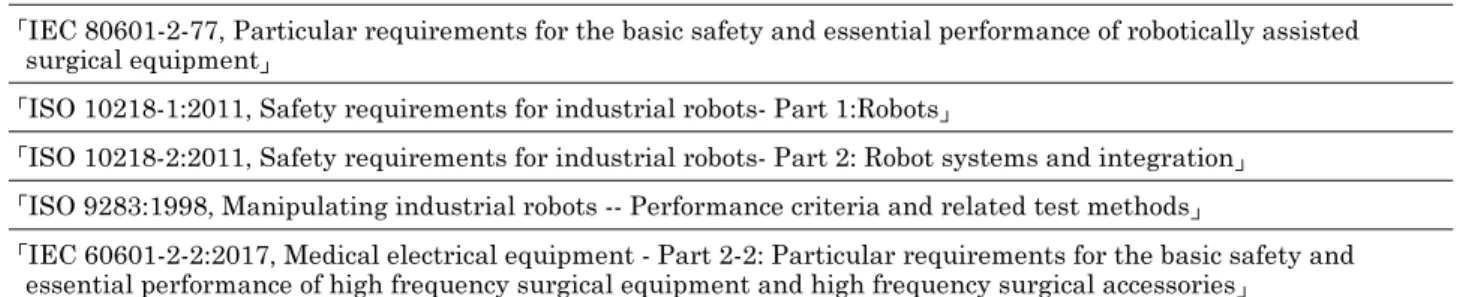
표 1. 개방형 로봇 플랫폼 기반 미세수술로봇의 시험항목 도출을 위한 참고규격
Table 1. Reference standards for derivation of micro-surgical robots based on open robot platform Referenced international standards
「IEC 80601-2-77, Particular requirements for the basic safety and essential performance of robotically assisted surgical equipment」
「ISO 10218-1:2011, Safety requirements for industrial robots- Part 1:Robots」
「ISO 10218-2:2011, Safety requirements for industrial robots- Part 2: Robot systems and integration」
「ISO 9283:1998, Manipulating industrial robots -- Performance criteria and related test methods」
「IEC 60601-2-2:2017, Medical electrical equipment - Part 2-2: Particular requirements for the basic safety and essential performance of high frequency surgical equipment and high frequency surgical accessories」
「IEC 60601-2-22:2007, Medical electrical equipment - Part 2-22: Particular requirements for basic safety and essential performance of surgical, cosmetic, therapeutic and diagnostic laser equipment」
208
으로 분류하고 있다.
2. 개방형 로봇 플랫폼 기반 미세수술로봇 관련 규격 및 평가 시험 항목 선정
개방형 로봇 플랫폼 기반 미세수술로봇의 성능 및 안전성 시험항목을 도출하기 위한 국외 표준규격은 다음과 같다. 각 규격에 대하여 분석을 실시하여 개방형 로봇 플랫폼 기반 미세수술로봇의 특성상 추가적으로 적용해야 하는 안전에
관한 요구사항을 도출하고, 산학연으로 구성된 전문가 자문 회의를 통해 항목설정 및 설정항목 수정을 거쳐 안전성 평 가항목을 도출하였다.
2.1 안전성 관련 규격 및 항목
개방형 로봇 플랫폼 기반 미세수술로봇의 안전에 관한 평가 항목은 식품의약품안전처 고시 「의료기기 공통기준규격」과
「의료기기의 전자파안전에 관한 공통기준규격」에 따르는
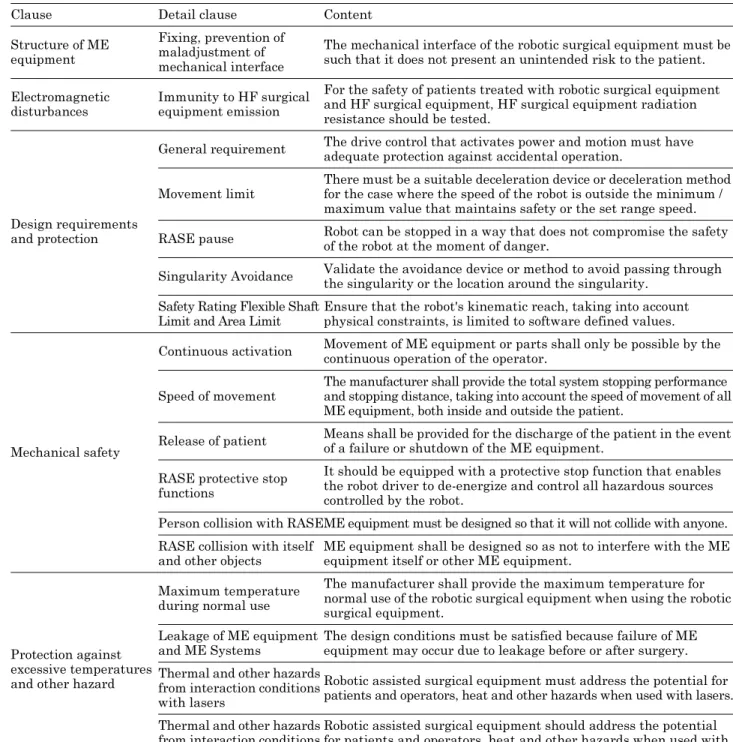
표 2. 개방형 로봇 플랫폼 기반 미세수술로봇의 안전성 평가항목
Table 2. Safety evaluation lists of micro-surgical robots based on open robot platform
Clause Detail clause Content
Structure of ME equipment
Fixing, prevention of maladjustment of mechanical interface
The mechanical interface of the robotic surgical equipment must be such that it does not present an unintended risk to the patient.
Electromagnetic disturbances
Immunity to HF surgical equipment emission
For the safety of patients treated with robotic surgical equipment and HF surgical equipment, HF surgical equipment radiation resistance should be tested.
Design requirements and protection
General requirement The drive control that activates power and motion must have adequate protection against accidental operation.
Movement limit
There must be a suitable deceleration device or deceleration method for the case where the speed of the robot is outside the minimum / maximum value that maintains safety or the set range speed.
RASE pause Robot can be stopped in a way that does not compromise the safety of the robot at the moment of danger.
Singularity Avoidance Validate the avoidance device or method to avoid passing through the singularity or the location around the singularity.
Safety Rating Flexible Shaft Limit and Area Limit
Ensure that the robot's kinematic reach, taking into account physical constraints, is limited to software defined values.
Mechanical safety
Continuous activation Movement of ME equipment or parts shall only be possible by the continuous operation of the operator.
Speed of movement
The manufacturer shall provide the total system stopping performance and stopping distance, taking into account the speed of movement of all ME equipment, both inside and outside the patient.
Release of patient Means shall be provided for the discharge of the patient in the event of a failure or shutdown of the ME equipment.
RASE protective stop functions
It should be equipped with a protective stop function that enables the robot driver to de-energize and control all hazardous sources controlled by the robot.
Person collision with RASEME equipment must be designed so that it will not collide with anyone.
RASE collision with itself and other objects
ME equipment shall be designed so as not to interfere with the ME equipment itself or other ME equipment.
Protection against excessive temperatures and other hazard
Maximum temperature during normal use
The manufacturer shall provide the maximum temperature for normal use of the robotic surgical equipment when using the robotic surgical equipment.
Leakage of ME equipment and ME Systems
The design conditions must be satisfied because failure of ME equipment may occur due to leakage before or after surgery.
Thermal and other hazards from interaction conditions with lasers
Robotic assisted surgical equipment must address the potential for patients and operators, heat and other hazards when used with lasers.
Thermal and other hazards from interaction conditions with HF surgical equipment
Robotic assisted surgical equipment should address the potential for patients and operators, heat and other hazards when used with HF surgical equipment.
209 것 외에, 다양한 국제 규제현황 및 「IEC 80601-2-77」,
「ISO 10218-1」, 「ISO 10218-2」을 참고하였다. 안전성 평가항목은 표 2에 제시된 내용과 같이 안전성, 과도한 온도 및 기타 위험에 대한 보호, 기기 구조, 전자파 장해, 설계 요 구사항 및 보호수단으로 나눠 설정하였다.
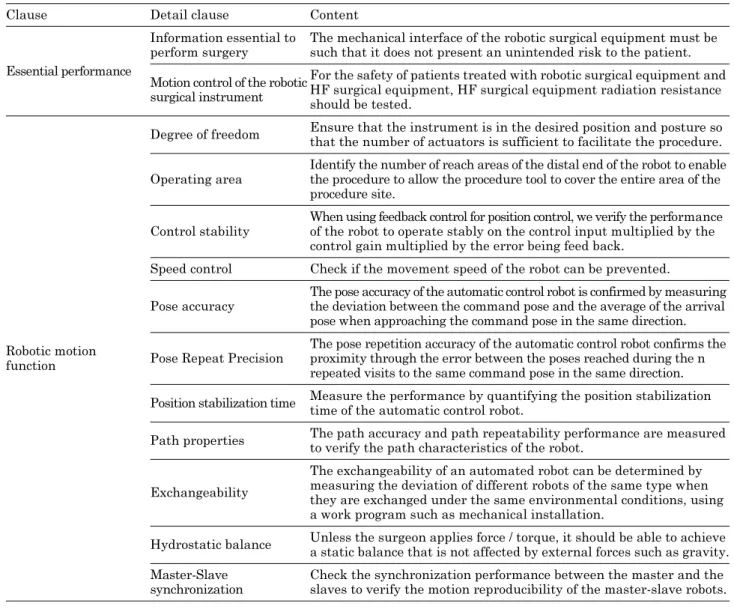
2.2 성능평가 관련 규격 및 항목
개방형 로봇 플랫폼 기반 미세수술로봇의 성능에 관한 평가 항목은 각각의 개별규격을 분석하였다.「IEC 80601-2-77」을 통하여 필수성능을 도출하였으며 「ISO 10218-1」, 「ISO 10218-2 」,「ISO 9283」을 통하여 추가적인 성능항목을 도출 하였다. 표 3에 제시된 내용과 같이 기기에 대한 성능 평가 항목은 필수성능, 로봇 모션성능으로 구분하여 설정하였다.
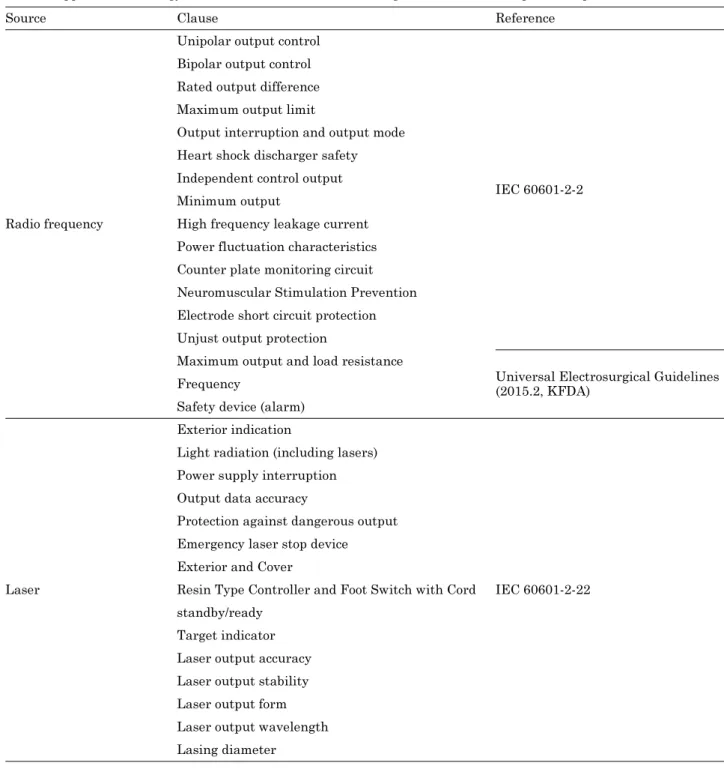
또한 수술로봇에 사용되는 End-effector 에너지원에 적용 되는 항목으로「IEC 60601-2-2」,「IEC 60601-2-22」를 참고하여 표 4와 같이 제시하였다.
3. 개방형 로봇 플랫폼 기반 미세수술로봇의 안전성 및 성능 평가 항목 및 시험
개방형 로봇 플랫폼 기반 미세수술로봇은 현재 적용할 수 있는 국제규격이 존재하지 않는다. 따라서 개방형 로봇 플 랫폼 기반 미세수술로봇에 맞는 항목을 참조 규격에서 도출 하였으며 각 규격에서 중복되는 내용을 통일하여 하나의 항 목으로 구성하였다. 또한, 도출된 항목들에 대하여 실제 개 방형 로봇 플랫폼 기반 미세수술로봇을 개발하여 의료기기 시장에 진입하려는 제조 및 수입업체 의료기기에 적용이 가 능한지 여부를 시험하고자 하였다.
개방형 로봇 플랫폼 기반 미세수술로봇에 적용되는 규격 에서 요구하는 안전성 및 성능평가는 Dr.Hujoon (KIST)과 자체 검증을 위해 사용되는 UR10 (Universal robots, Denmark)으 로 적용할 수 있는 항목만을 시험하였다. 안전성 항목은
「IEC 60601-1」에 따른 시험환경을 구축하여 시험 평가하는 것 으로 파악되고 2019년 제정될「IEC 80601-2-77」과 「ISO
표 3. 개방형 로봇 플랫폼 기반 미세수술로봇의 성능 평가항목Table 3. Performance evaluation lists of micro-surgical robot based on open robot platform
Clause Detail clause Content
Essential performance
Information essential to perform surgery
The mechanical interface of the robotic surgical equipment must be such that it does not present an unintended risk to the patient.
Motion control of the robotic surgical instrument
For the safety of patients treated with robotic surgical equipment and HF surgical equipment, HF surgical equipment radiation resistance should be tested.
Robotic motion function
Degree of freedom Ensure that the instrument is in the desired position and posture so that the number of actuators is sufficient to facilitate the procedure.
Operating area
Identify the number of reach areas of the distal end of the robot to enable the procedure to allow the procedure tool to cover the entire area of the procedure site.
Control stability
When using feedback control for position control, we verify the performance of the robot to operate stably on the control input multiplied by the control gain multiplied by the error being feed back.
Speed control Check if the movement speed of the robot can be prevented.
Pose accuracy
The pose accuracy of the automatic control robot is confirmed by measuring the deviation between the command pose and the average of the arrival pose when approaching the command pose in the same direction.
Pose Repeat Precision
The pose repetition accuracy of the automatic control robot confirms the proximity through the error between the poses reached during the n repeated visits to the same command pose in the same direction.
Position stabilization time Measure the performance by quantifying the position stabilization time of the automatic control robot.
Path properties The path accuracy and path repeatability performance are measured to verify the path characteristics of the robot.
Exchangeability
The exchangeability of an automated robot can be determined by measuring the deviation of different robots of the same type when they are exchanged under the same environmental conditions, using a work program such as mechanical installation.
Hydrostatic balance Unless the surgeon applies force / torque, it should be able to achieve a static balance that is not affected by external forces such as gravity.
Master-Slave synchronization
Check the synchronization performance between the master and the slaves to verify the motion reproducibility of the master-slave robots.
210
10218-1 」,「ISO 10218-2」에 따라 평가될 것으로 예상된다.
3.1 로봇장치 또는 손을 이용하여 End-effector를 이용하 였을 때의 이동 시 안전성 비교
End-effecter 를 로봇장치 또는 손을 이용하여 이동할 때 생기는 토크(torque)와 힘(force)을 측정 및 비교하여 어느 방법이 End-effector 이동에 안전성을 갖는지 비교하는 실 험을 진행하였으며, 각 결과에 대한 값은 아래와 같다.
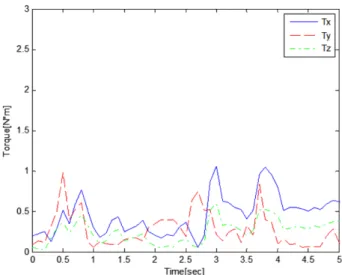
3.1.1 손을 이용한 End-effector의 이동
그림 1의 ①위치를 움직여 시험을 진행하였다. 해당 시험은 사람의 손으로 로봇의 방향을 전환하는 과정에서 부득이하 게 필요이상의 힘(Force)이 개입되면서 특정구간에서의 Fx, Fy 값이 순간적으로 상승하는 것을 그래프로 확인할 수 있 었다. Fz의 경우 Fx, Fy와 반대로 증감이 되고 있었으며 이는 이동 시 End-effector의 움직임을 방지하기 위해 손으로 일 정 힘이 가하면서 생성된 것으로 판단된다(그림 4). 이 실
표 4. 개방형 로봇 플랫폼 기반 미세수술로봇의 End-effector에 따른 에너지원에 대한 적용항목Table 4. Application of energy source to End-effector of micro-surgical robot based on open robot platform
Source Clause Reference
Radio frequency
Unipolar output control
IEC 60601-2-2 Bipolar output control
Rated output difference Maximum output limit
Output interruption and output mode Heart shock discharger safety Independent control output Minimum output
High frequency leakage current Power fluctuation characteristics Counter plate monitoring circuit Neuromuscular Stimulation Prevention Electrode short circuit protection Unjust output protection
Maximum output and load resistance
Universal Electrosurgical Guidelines (2015.2, KFDA)
Frequency
Safety device (alarm)
Laser
Exterior indication
IEC 60601-2-22 Light radiation (including lasers)
Power supply interruption Output data accuracy
Protection against dangerous output Emergency laser stop device Exterior and Cover
Resin Type Controller and Foot Switch with Cord standby/ready
Target indicator Laser output accuracy Laser output stability Laser output form Laser output wavelength Lasing diameter
211
험의 결과는 센서를 사람에게 장착할 수 없는 한계점으로 인하여 산업용 로봇팔을 손으로 직접 이동시켜 힘이 들어가 는 구간이 발생하였기 때문으로 생각된다.
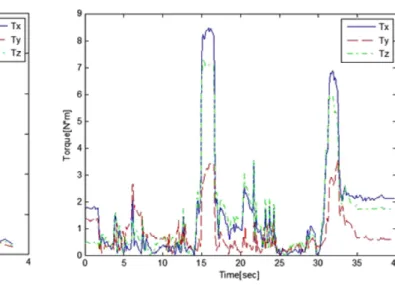
3.1.2 로봇장치를 이용한 End-effector 이동
로봇장치를 이용하여 이동 시 많은 힘이 발생하고 있다.
그래프에서는 3번의 왕복운동을 진행하였다. Fx, Fy, Fz가 그래프와 같이 크게 움직이는 건 로봇팔의 움직임으로 인한 End-effector 의 덜컥거림으로 볼 수 있으며 이에따라 토크 (Tx, Ty, Tz) 가 순간적으로 증가함을 볼 수 있다(그림 6, 그 림7). End-effector는 로봇팔과 3개의 지그를 통하여 연결 되어 있는 상태에서, End-effector에 전원이 인가되지 않아 모터가 작동하지 않았다. 그에 따라 덜컥거림이 발생되었다. 이 실험의 결과를 통하여 수술용 로봇으로 사용하게 될 때 일 정수준 이상의 덜컥거림은 예상하지 못한 결과를 만들 수
있고, 특히 인체 내부에 진입하면 인체내부 손상으로 이어 지므로 이에 대한 추가적인 성능 및 안전성 시험항목이 필 요하다고 판단되었다.
3.2 로봇장치를 이용한 End-effector 이동에서 환자와 충 돌로 인한 위해성 확인
End-effector 를 이동시킬 시 인체에 부딪히면서 End-
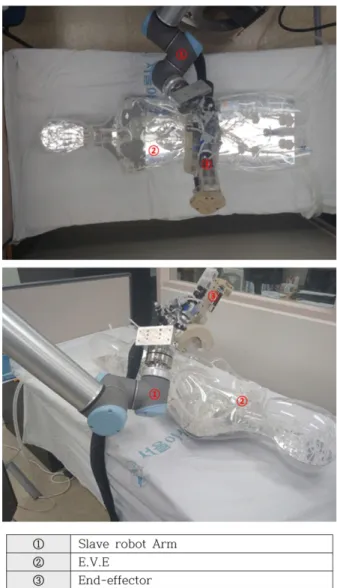
그림 1. 개방형 수술로봇 플랫폼 기반 미세수술로봇 실험환경 Set-upFig. 1. Set-up of Micro Surgical Robot Test Environment based on Open Surgical Robot Platform
그림 2. Force/Torque 측정 시스템 구성
Fig. 2. Force / Torque measurement system configuration
그림 3. Force/Torque 측정 센서
Fig. 3. Set-up of Micro Surgical Robot Test Environment based on Open Surgical Robot Platform
212
effector 의 힘과 토크를 확인하고 그 위해성을 확인하고자 인체모형 더미에 End-effector를 진행시켰다. 총 3번의 충 돌을 재현하였으며 인체모형 더미에 End-effector가 충돌 시 다른 시험에서 확인한 덜컥거림보다 최소 3배가 넘는 힘이 카테터의 각 축에 발생하였고, 4배가 넘는 토크가 카테터에 발생하였다(그림 8, 그림 9). 이러한 갑작스런 힘은 End- effector 에게 예상할 수 없는 구조적 위해를 가할 수 있으며, 인 체에 닿는 End effector가 인체에 상해를 입히는 등의 위 해를 입힐 수 있을 것으로 판단된다.
3.3 조작자에 따른 위치정확도
조작자의 숙련도에 따른 환자에게 가해질 수 있는 위해도
그림 4. 손을 이용한 End-effector의 이동(Force)Fig. 4. Movement of the End-effector by hand(Force)
그림 5. 손을 이용한 End-effector의 이동(Torque) Fig. 5. Movement of the End-effector by hand(Torque)
그림 6. 로봇장치를 이용한 End-effector의 이동(Force)
Fig. 6. Movement of End-effector using robot device(Force)
그림 7. 로봇 장치를 이용한 End-effector의 이동(Torque) Fig. 7. Movement of End-effector using robot device(Torque)
그림 8. 로봇장치를 이용한 End-effector 이동의 위해성(Force) Fig. 8. Risk of End-effector movement using robot device (Force)
213 에 대한 내용을 확인하였다. 특정 위치를 지정하고 시작점
부터 특정위치까지 왕복하여 그 결과를 분석하였다. 인체모 양 더미에 부딪히지 않고 이동하였으며 최대한 천천히 작동 시켰으나 총 2번의 조작실수가 있었다. 진행된 시험은 눈으 로 장비의 이동을 보며 실행하였지만 실제 수술환경에서 실 제 눈으로 확인할 수 있는 범위는 제한된다. 따라서 조작자의 숙련도가 없다면 위의 결과보다 조작에 실패하는 상황이 더 생길 수 있을 것으로 예상이 가능하다. 실제 환경에서의 에 러는 환자에게 위해가 직접적으로 전달될 가능성이 크므로 이와 관련된 성능 및 안전성 규격이 필요할 것으로 판단된 다(그림 10, 그림11).
IV. 결 론
개방형 플랫폼 기반 미세수술로봇의 의미와 역할, 그리고 적용될 수 있는 개별규격을 조사 분석을 통하여 사용목적 및 대상에 따라 명확한 품목분류 기준을 제시하고 해당 품 목에 대한 안전성 및 성능평가 가이드라인을 제시하였다. 개 방형 플랫폼 기반 미세수술로봇의 안전성 및 성능평가 항목은
「IEC 80601-2-77」,「ISO 10218-1」,「ISO 10218-2」, 「ISO 9283 」,「IEC 60601-2-2」,「IEC 60601-2-22」를 기반으 로 도출하였으며 기기에 적용이 가능한 항목만을 고려하였 다. 연구를 통하여 도출된 개방형 플랫폼 기반 미세수술로 봇에 대한 성능 및 안전성 평가에서 추가적으로 필요한 내 용을 찾고자 시험을 진행하였다. 로봇장치를 이용한 End- effector 이동시험에서 언급하였듯이 수술로봇이 인체내부에 서 예상치 못한 덜컥거림으로 인한 환자위해와 같은 내용을 추가적으로 더 도출해야 할 필요성이 있다. 추후 또한 기준 으로 삼은 IEC 80601-2-77」은 2019년 제정 후 안전성 관 련 변동내용에 대하여 추가가 필요할 것이다.
위의 연구내용과 같이 본 연구에서 마련한 가이드라인은 개방형 플랫폼 기반 미세수술로봇에 대하여 국제규격을 통 한 기준을 제시하여 관련 의료기기 개발사 및 허가·심사자 가 업무수행에 유용하게 사용될 수 있을 것이라 예상한다.
References
[1] Ryu Nakadate, Makoto Hashizume. Intelligent Information- Guided Robotic Surgery: IntechOpen. 2018.
[2] Oh JS, Shin WK, Nguyen PB, Uhm CH, Choi SB. A Haptic Master-slave Robot System: Experimental Performance Evaluation for Medical Application. KSNVE. 2013;23(1):41-8.
그림 9. 로봇장치를 이용한 End-effector 이동의 위해성(Torque) Fig. 9. Risk of End-effector movement using robot device (Torque)
그림 10. 조작자에 따른 위치정확도(Force)
Fig. 10. Position accuracy according to operator(Force)
그림 11. 조작자에 따른 위치정확도(Torque)
Fig. 11. Position accuracy according to operator(Torque)
214
[3] Sridhar AN, Briggs TP, Kelly JD, Nathan S. Training in Robotic Surgery-an Overview. Current Urology Reports.
2017;18(8):58.
[4] IEC 80601-2-77. Particular requirements for the basic safety and essential performance of robotically assisted surgical equipment.
[5] ISO 10218-1:2011. Safety requirements for industrial robots- Part 1:Robots.
[6] ISO 10218-2:2011. Safety requirements for industrial robots- Part 2: Robot systems and integration.
[7] ISO 9283:1998. Manipulating industrial robots – Perfor- mance criteria and related test methods.
[8] IEC 60601-2-2:2017. Medical electrical equipment – Part 2- 2: Particular requirements for the basic safety and essential performance of high frequency surgical equipment and high frequency surgical accessories.
[9] IEC 60601-2-22:2007. Medical electrical equipment – Part 2-22: Particular requirements for basic safety and essential performance of surgical, cosmetic, therapeutic and diagnos- tic laser equipment.