1. Introduction
Edges are linear features in images where brightness values change abruptly. For extracting and recognizing object from images, it is essential to find edge pixels and localize the position of edges. Because of the importance of edges in image processing and computer vision, considerable efforts have been made to extract and localize the edges in images. Canny (1986) proposed an edge extraction method which detect edge pixels based on gradients. Lindeberg (1998) detected
edges based on local image structures and scales. Many methods for edge detection were reviewed extensively in Ziou and Tabbone (1998), Basu (2002), and Papari and Petkov (2011).
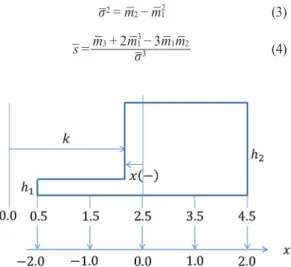
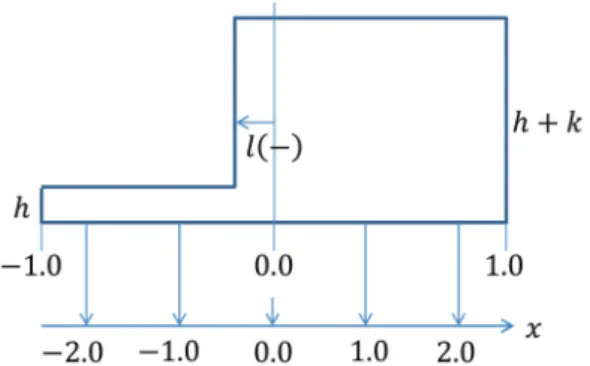
For precise extraction of edges from images, it is essential to localize the position of edges in subpixel accuracy. Many methods have been suggested for subpixel localization of edges. Tabatabai and Mitchell (1984) presented a moment-based approach which localizes edges by finding edge the edge parameters with a condition that the resulting edge model preserves
Comparison of Edge Localization Performance of Moment-Based Operators Using Target Image Data
Suyoung Seo
†Department of Civil Engineering, Kyungpook National University
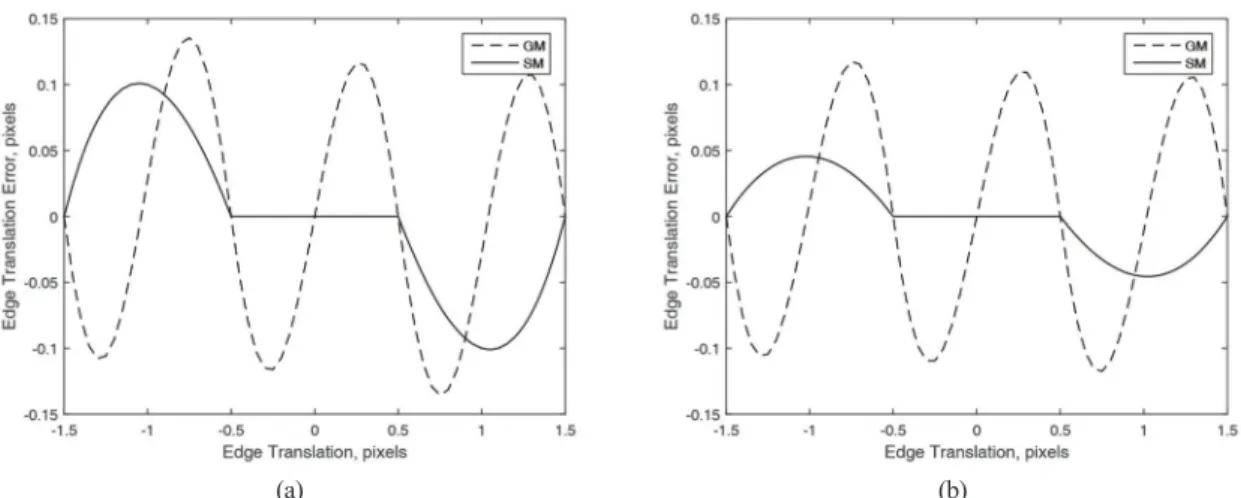
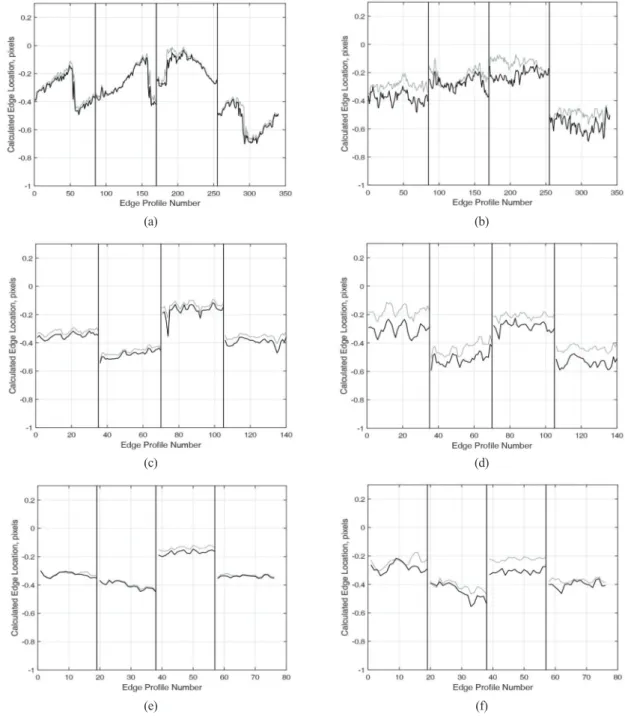
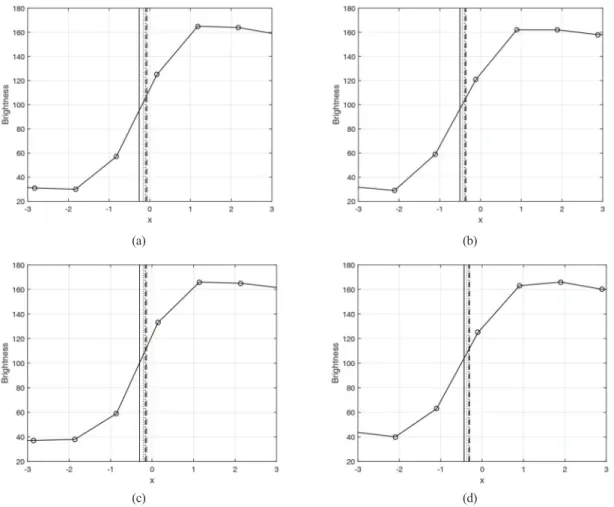
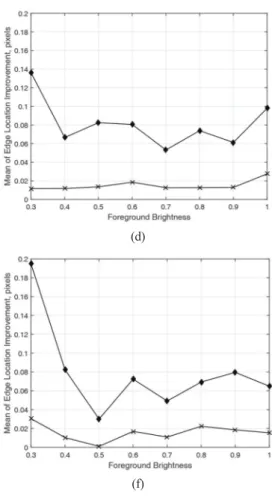
Abstract : This paper presents a method to evaluate the performance of subpixel localization operators using target image data. Subpixel localization of edges is important to extract the precise shape of objects from images. In this study, each target image was designed to provide reference lines and edges to which the localization operators can be applied. We selected two types of moment-based operators: Gray-level Moment (GM) operator and Spatial Moment (SM) operator for comparison. The original edge localization operators with kernel size 5 are tested and their extended versions with kernel size 7 are also tested. Target images were collected with varying Camera-to-Object Distance (COD). From the target images, reference lines are estimated and edge profiles along the estimated reference lines are accumulated. Then, evaluation of the performance of edge localization operators was performed by comparing the locations calculated by each operator and by superimposing them on edge profiles. Also, enhancement of edge localization by increasing the kernel size was also quantified. The experimental result shows that the SM operator whose kernel size is 7 provides higher accuracy than other operators implemented in this study.
Key Words : Subpixel localization, target image, moment-based operators, localization performance
Received January 8, 2016; Revised February 16, 2016, Accepted February 18, 2016.
†