11
무작위 회전 장치의 제작
임정구1ㆍ소현철2ㆍ소웅영3ㆍ박성우4ㆍ김성완5
국군 함평병원1, 성균관대학교2, 전북대학교3, 서울대학교 공과대학4, 서울대학교 의과대학5
The Construction of Random Positioning Machine
Jeongku Lim, M.D., M.S.1, Hyuncheol Soh, M.S.2, Woong-Young Soh, Ph.D.3, Sung Woo Park, B.S.4, Sungwan Kim, Ph.D.5
1The Armed Forces Hampyeong Hospital, Hampyeong, 2Sungkyunkwan University, Suwon,
3Chonbuk National Uviversity, Jeonju, 4Seoul National University of College of Engineerng,
5Seoul National University College of Medicine, Seoul, Korea
Background: Random positioning machine (RPM) is a very effective device that can be used for space experiments on Earth. RPM had been constructed and verified for its ability to simulate microgravity conditions. This study was done to construct the RPM and to evaluate the growth pattern of Brasica on RPM. Methods: 2d clinostat was constructed and Arabidopsises were grown on it for 2 weeks. The experiment group on 2d clinostat was compared with the control group on Earth. RPM has been designed, constructed and checked for its ability to simulate microgravity conditions in the Seoul National University College of Medicine. Brasicas were grown for 72 hours both on RPM and on Earth and their growth patterns were compared. Results: RPM had operated in normal conditions without any significant failures. To verify the microgravity conditions, the summation of gravity vectors on the sample stage were depicted on a graph and also calculated by time. Each point of gravity vectors became an entire globe shape and the cumulated summation of gravity vectors decreased below 10-3 g. Conclusion: RPM was successfully constructed in Korea and automorphogenesis of Brasica was observed during their growth on RPM like space. Diverse experiments with plants and animal cells will be possible in the future on RPM.
Key words: Clinostat, Random Positioning Machine (RPM), Automorphogenesis, Arabidopsis, Brasica
접수: 2015년 1월 5일, 심사완료일: 2015년 3월 24일 교신저자: 임정구
우 525-873 전남 함평군 해보면 신해로 1027 국군함평병원
Tel: 061-324-6400, Fax: 061-324-1763 E-mail: [email protected]
I. 서 론
우주에 관한 연구는 세계 각국이 미래에 대한 투자로 경 쟁적으로 진행하고 있다. 대한민국도 장기 계획을 수립하 면서 달 탐사 계획을 발표하였으나 15년도 410억 예산이 삭 감되면서 어려운 상황에 직면하고 있다. 예산이 배정되어 도 대부분이 발사체 개발에 사용되어 우주 기초 연구에는 사용되기 힘든 상황이다. 그러나 우주 개발의 궁극적 목표
는 우주인을 우주로 보내는 것이며 이를 위해 우주 관련 기초 연구는 세계 각국에서 수행하고 있으나 국내에서는 관련 연구가 매우 적은 편이다.
저자는 우주 기초 연구를 활성화하기 위해 무작위 회전 장치(RPM, random positioning machine) 제작을 계획하였다.
지상에서 우주 환경과 유사한 무중력 연구를 하기 위해 1994년에 D. Mesland에 의하여 “true random positioning” 개념 이 정립되기 시작하면서 1997년에 만들어진 장비가 RPM 이다. RPM은 중앙에 위치한 샘플이 중력에 대하여 반응하 는 시간보다 적은 시간에 샘플에 주어지는 중력 벡터 방향 을 무작위로 바꾸어 무중력 환경을 조성한다[1]. RPM에서 연구 대상은 주로 식물이나 동물 세포이며 현재 미국, 일본, 그리고 네덜란드 등에서는 RPM을 제작하여 기초 연구 실 험을 하고 있다.
저자는 국내 우주 기초 연구를 활성화하기 위해 RPM을
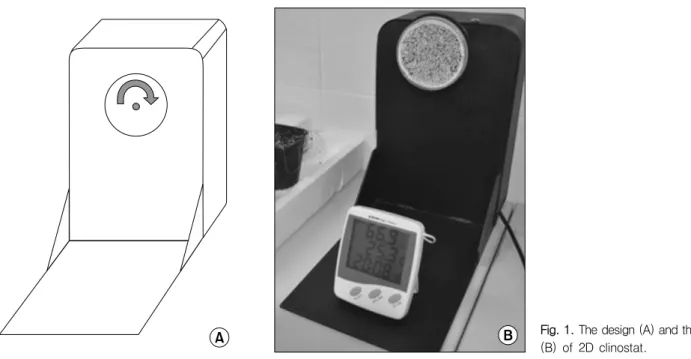
Fig. 1. The design (A) and the photo (B) of 2D clinostat.
제작하고 식물이 무중력 모의 상황에서 어떻게 성장하는지 관찰하였다. RPM 제작 후 표본 설치대의 무중력 상태가 조 성되는 점을 확인하는 것이 중요한데 표본의 중력 벡터 이 동 경로를 저장하여 모든 방향으로 회전하여 완전한 구형 모양을 만드는지 확인하였다. 또한 시간의 경과에 따른 누 적 중력 값을 계산하여 16시간 이후에 10−4 g에 도달 함을 확인하였다. 중력의 소실은 식물의 성장 방향 등에 영향을 주는데 이를 automorphogenesis(자동 형태 발생)라 한다[2].
이는 식물이 성장하며 성장 방향이 바뀌거나 자발적 굴곡 을 보이는 것이다. 우선 국내에서 자체 개발한 RPM을 제작 하여 오래 전 알려진 이러한 자동 형태 발생 변화를 실험을 통해 확인하고 향후 우주 관련 기초 연구에 활용할 계획이 다.
II. 재료 및 방법 1. 2D clinostat
1) 제작
Fig. 1의 디자인(A)을 참조하여 항공우주의료원에서 2D clinostat (B)을 제작하였다. 장비 크기는 40×30×20 cm이며 표 본 설치대(sample stage)는 지름 10 cm 원형이다. 2D clinostat 은 한 개의 수평축을 중심으로 회전하는 장비로 표본 설치 대는 상부에 배치하였고 외면은 철판을 사용하여 안정감을 주었다. 표본 설치대는 원형으로 제작하여 Petri dish를 부착 할 수 있도록 하였다. 표본 설치대와 Petri dish 후면에는 각 각 Velcro를 부착하여 필요 시 부착 및 제거하였다. 모터는
220 Volt 전원으로 구동되며 최대 15 rpm까지 회전이 가능 하다. 회전 속도는 측면의 컨트롤 스위치로 조절하나 실험 기간 중에는 일정한 회전 속도로 실험을 진행하였다. 식물 실험을 위한 광합성 조명 장치는 별도로 제작하지 않았다.
2) 식물 성장 비교
애기장대(Arabidopsis)를 지상과 2D clinostat에서 2주간 관찰 하였다. 애기장대를 아가 배지가 담긴 Petri dish 상에서 재 배하였다. 2014년 4월 3일부터 4월 17일까지 관찰하였으며, 추가로 수분 공급은 하지 않았다. 광합성을 위한 별도의 조 명 장치 없이 햇빛에 노출하였으며 대조군은 Petri dish를 지 상에 2주간 그대로 수직 방향으로 고정하고 실험군은 2D clinostat 상에서 2rpm으로 회전시켰다. 실내 온도와 습도는 자연 상태를 유지하였다. 2주 후 애기장대의 뿌리 수, 뿌리 길이, 잎 수를 관찰하여 지상과 2D clinostat 상에서 변화를 비교하였다. 통계적으로 paired-t test를 사용하여 두 그룹간의 차이를 확인하였으며 P<0.05를 유의수준으로 판단하였다.
2. RPM
1) 제작
3D clinostat의 개념을 참조하여 RPM을 제작하였다. RPM 제작은 서울대 의공학과에서 설계, 소프트웨어 개발, 무중 력 확인 그리고 기계 안정성 실험 순으로 진행하였으며 총 제작 기간은 1년이 소요 되었다. 무중력 조성에 대한 확인 은 X, Y 그리고 Z축의 중력 vector의 방향을 시간에 따라 구형으로 표시하여 일정 시간 경과 후 완전한 구형이 되는지 확인하였다. 또한 시간 경과에 따른 누적 벡터 값을 간접적
Fig. 3. The growth of Arabidopsis on Earth (A) and 2D clinostat (B).
Fig. 2. The RPM with a computer and a monitor.
으로 계산하여 일반적으로 무중력 상태로 인정하는 10−4 g 이하의 값이 계산 됨을 추가 확인하였다. 최종 무작위 회전 기의 모습은 Fig. 2으로 RPM, 컴퓨터, 그리고 모니터로 구성 되어 있다. 전원은 220 Volt를 사용하였고 무작위 회전기의 세부 설명은 결과에 정리하였다.
2) 식물 성장 비교
비타민채(Brasica campestris)를 발아시켜 충분하게 물로 적신 키친타월에 고정하고, 대조군은 지상과 수직방향으로 고정 하여 비타민채를 관찰하였다. 실험군은 키친타월에 발아시 킨 비타민채를 RPM 표본 설치대에 고정하여 motor 1은 2~3 rpm으로 motor 2는 3~5 rpm으로 무작위로 회전시켰다. 대 조군과 실험군에 하루에 한번 충분한 수분 공급을 하였으 며 72시간 동안 변화를 관찰하였다. 비타민채는 빛의 방향 에 민감하여 두 그룹 모두 빛을 차단한 상태에서 관찰하였 다. 실온에서 관찰하였으며 뿌리와 줄기의 성장 방향 변화
를 관찰하였다. 72시간 후에 두 그룹을 각각 사진 촬영하여 비교하였다. 72시간 동안 RPM은 회전을 멈추지 않았으며 실험 종료 후 표본 설치대에서 비타민채를 꺼내 변화를 관 찰하였다.
III. 결 과 1. 2D clinostat
2주간 관찰한 애기장대의 사진은 Fig. 3와 같다. 지상에서 정상적으로 성장한 (A)의 경우는 뿌리가 거의 수직방향으 로 자라는 것을 볼 수 있다. 하지만 (B)의 경우는 중력의 소 실로 뿌리의 성장 방향이 매우 불규칙 함을 관찰 할 수 있 었다. 잎의 성장 방향도 (A)에서는 대부분 위를 향하였으나 (B)에서는 매우 불규칙하게 나타났다.
애기장대 잎의 수도 차이를 보여 RPM에서 자란 애기장대 의 잎이 통계적으로 유의하게 감소되어 있었다(Table 1). 그 러나 뿌리의 수나 길이는 두 그룹간에 커다란 차이가 없었 다.
2. RPM
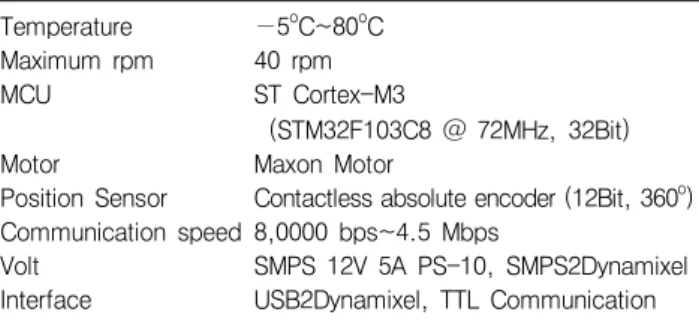
RPM의 세부적 사항에 대하여 Table 2에 정리하였다. RPM의 크기는 31×31×31 cm 이고 표본 설치대의 크기는 16×16×3 cm 였다. 주요 특성으로 작동 온도 범위는 −5oC~80oC 그리고 각 motor의 최고 rpm은 40이고 위치에 대한 정확한 정보를 얻기 위하여 contactless absolute encoder를 사용하였다.
모니터에 구현되는 User interface는 Fig. 4와 같고 “Com Port”는 USB를 통하여 컴퓨터와 연결되는 포트 번호를 사용 자가 입력한다. “Connect”는 RPM과 컴퓨터를 연결시켜 준
The number of roots
The number of leaves
The average length of roots On 2D clinostat 1.5±0.76 2.75±1.49 2.9±1.08 On Earth 1.63±0.52 4.25±1.16 3.65±1.64
P value 0.705 0.041* 0.299
Table 1. The comparison of roots and leaves (cm)
Fig. 5. The serial view of vector directions by time.
Temperature −5oC~80oC Maximum rpm 40 rpm
MCU ST Cortex-M3
(STM32F103C8 @ 72MHz, 32Bit)
Motor Maxon Motor
Position Sensor Contactless absolute encoder (12Bit, 360o) Communication speed 8,0000 bps~4.5 Mbps
Volt SMPS 12V 5A PS-10, SMPS2Dynamixel Interface USB2Dynamixel, TTL Communication Table 2. The Specifications of 3D RPM
Fig. 4. The user's interface.
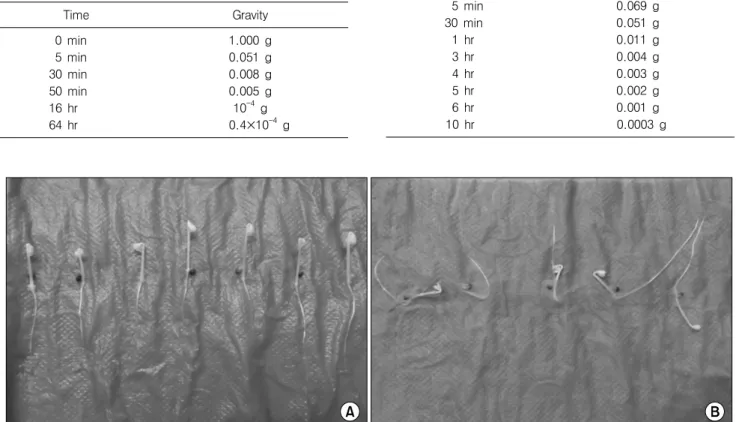
Time Gravity
0 min 1.000 g
5 min 0.051 g
30 min 0.008 g
50 min 0.005 g
16 hr 10-4 g
64 hr 0.4×10-4 g
Table 3. The estimated gravities by time Time Gravity
5 min 0.069 g
30 min 0.051 g
1 hr 0.011 g
3 hr 0.004 g
4 hr 0.003 g
5 hr 0.002 g
6 hr 0.001 g
10 hr 0.0003 g
Table 4. The real gravities during experiment by time
Fig. 6. The growth patterns of Brassica campestris on Earth (A) and RPM (B).
다. “Start”는 RPM작동을 시작한다. “Stop”은 RPM 작동을 멈 춘다. “Hours, Minutes, Seconds”는 경과된 시간을, “Position1, Position2”는 각 모터의 위치를 표시한다(0o~360o). “Vector x, Vector y, Vector z”는 실험대 방향의 벡터 값을 의미하며
“Gravity”는 작동하지 않았을 때를 기준으로 변화하는 중력의 크기를 의미한다. “Motor1, Motor2”는 각각 모터 속도의 최대 값과 최소값을 표시하며, “Velocity”는 프로그램에서 제어하는 각 모터의 속도 변화 그래프(0 rpm~40 rpm)이며 “Position”
은 각 모터의 위치 변화 그래프이다(0o~360o).
Vector direction은 중력 vector의 방향을 시간에 따라 구형 으로 표시하여 누적 값을 선과 색으로 표현한 것이다. 16시 간 경과 후 완전한 구형으로 나타나 무중력 상태를 조성하 고 있음을 알 수 있다(Fig. 5).
시간의 경과에 따라 누적된 실험대 vector의 합을 계산하 여 gravity force를 간접적으로 계산하는 식은 다음과 같다 (sampling rate=20 Hz).
×
시간이 경과할수록 ΣSample stage(fixed)는 누적되어 무한 대에 가까워짐에 따라 estimated gravity는 0으로 수렴한다.
예시로 계산한 64시간 동안의 estimated gravity는 Table 3에 정리하였다. 16시간 이후에 10−4 g에 도달함을 알 수 있다.
Motor 1은 2~3 rpm으로 motor 2는 3~5 rpm으로 실험을 진 행하였다. 시간의 흐름에 따른 표본 설치대의 실제 중력은 Table 4에 정리하였다.
비타민채 역시 지상과 RPM에서 다른 성장 모습을 보였 다. 72시간 동안 관찰한 결과 지상에서는 뿌리와 줄기가 수 직으로 성장하였으나(A) RPM 상에서는 줄기 및 뿌리 방향 이 매우 다양하게 나타났다(Fig. 6). 길이를 측정하지 않았으 나 육안으로 비교해 볼 때 줄기 및 뿌리의 길이는 유사하였 다.
IV. 고 찰
1882년 Sachs에 의해 처음 제작된 clinostat은 한 개 축의 회전을 통하여 무중력 상태를 조성하기 위한 장치로 고안 되었다[3]. 이번 연구에서 개발한 2D clinostat이 여기에 해당 한다. 무중력 실험을 하기 위해 우주로 나가기에는 천문학 적인 비용이 소요된다. 이러한 문제를 해결하기 위해 지상 에서 우주의 무중력 환경을 조성해주는 장비는 매우 유용 하다고 할 수 있다. 그러나 2D clinostat은 한 개의 축으로
무중력을 조성하기에는 제한적이며 곧 3D clinostat이 개발 되어 무중력 상태를 더욱 정밀하게 조성할 수 있었다[4].
이번에 개발한 2D clinostat에는 조명 시설이 별도로 설치 되지 않았다. 식물 연구용 조명은 필요 시에 추가로 설치하여 실험을 진행할 수 있을 것이다. 또한 실험 조건을 확인 할 수 있는 시간, 습도, 온도 등에 대한 센서가 부착되어 있지 않아 별도의 온도계 및 습도계를 이용하였다. 회전 시에 2d clinostat은 소음이 발생하였으나 그 강도는 심하지 않았다.
3D clinostat 개념이 더욱 발전하여 1994년에 D. Mesland에 의하여 “true random positioning”개념이 정립되면서 1997년에 원형이 제작되어 “Random Positioning Machine (RPM)로 명명 하였다[1]. 샘플에 주어지는 중력 방향을 무작위로 변경하여 좀 더 정밀하게 무중력에 가깝게 환경을 조성한다. 줄기와 뿌리의 중력에 대한 감지 역치는 각각 10−3 그리고 10−4 g 이다[5].
RPM의 원리는 “gravity vector-averaging”이다. 중력은 벡터 이므로 방향과 크기를 가진다. 회전을 통하여 중력의 벡터 를 계속적으로 상쇄시켜 결국 무중력과 유사한 환경을 조 성하는 것이다[1]. 그러나 두 개 축의 회전 속도가 일정할 경우 중력의 상쇄는 불가하며 두 개의 축이 다른 회전 속도 를 가질 때 중력 방향의 벡터는 상쇄 될 수 있다. 더욱 정밀 한 무중력을 조성하기 위해 두 개의 축이 무작위로 회전하 여야 한다[1].
Unsworth 등은 무중력 환경에서는 3차원적으로 분화된 조직과 같은 세포 집단을 형성 시킬 가능성이 있고 장차 장기 이식의 가능성도 있다고 보고하였다[6]. 이러한 무중 력을 지상에서 조성하는 RPM을 활용해서 연골모세포를 배 양하여 3차원적 구조물을 만든 실험도 보고되었다[7]. 향후 생명공학 분야에서 RPM을 활용하여 다양한 세포 배양 연 구를 진행한다면 흥미로운 결과들을 도출할 수 있을 것이다.
이미 이전의 연구들에서 무중력 상황하에서 식물의 성장 방향이 바뀐다는 사실은 잘 알려져 있다. Hoson 등은 식물 이 중력의 변화에 대하여 휘어지는 과정을 다음과 같이 요 약하였다. 1) 중력 감지 기전에 의하여 clinostat회전으로 발 생되는 중력 방향의 변화를 감지 2) 신호 전달체계를 이용 한 신호 전달 3) 신호의 결과로 최종 줄기와 뿌리의 굴곡[8].
이번 연구에서 2D clinostat과 RPM 상에서 모두 뿌리 줄기의 굴곡을 관찰 할 수 있었다. 또한 RPM 상에서 비타민채의 줄기와 뿌리도 매우 다양하게 성장함을 관찰 할 수 있었다.
Darwin은 이미 1907년에 식물이 중력에 대하여 이를 감지하 고 성장 방향을 바꿀수 있다고 보고하였다[9]. 식물의 뿌리 에 존재하는 중력 감지 부위를 중축세포(columella cell)이라 한다. 이러한 특수한 감각 세포가 평형세포(statocyte) 역할을 하는데 중력의 힘에 대하여 감지하고 반응한다.
애기장대는 상대적으로 짧은 약 1개월의 성장 주기를 가 진다[10]. 이번 실험에서 애기장대는 지상에서 평균 4.25개
의 잎을 만들었다. Brown 등의 연구에서 지상에서 애기장대 가 평균 5.8개의 잎을 만들었다[11]. 이 연구보다 잎의 갯수 가 적은 것은 사용된 빛의 차이라 생각한다. 저자는 실내에 서 특수한 빛을 사용하지 않았으나 Brown 등은 Sylvania GroLux Wide Spectrum fluorescent lamps를 실험 기간 동안 지 속적으로 비추었다. 또한 이번 실험에서 2주간 관찰하였으 나 Brown 등은 3주간 관찰하여 차이가 발생한 것으로 생각 한다. 2D clinostat에서 Brown 등이 관찰한 잎 수는 지상의 평균 5.8개 보다 감소한 4.88개였다. 저자들의 실험에서는 지상의 평균 4.25개에서 감소한 2.75개로 관찰되었다. 통계 적으로 P=0.041로 차이는 유의한 수준이었다.
이번 실험에서 지상과 비교하여 2D clinostat에서 성장시 킨 애기장대의 뿌리수와 뿌리 길이는 차이가 없었다. Hoson 등은 지상과 3D clinostat에서 cress, maize, rice, pea, 그리고 azuke 등을 성장시켜 뿌리 길이가 차이가 없음을 보고하였 다[8]. 이전의 연구에서 애기장대의 뿌리 수를 비교한 연구 는 찾을 수 없었다.
비타민채는 성장이 비교적 빠르고 수분 공급으로 쉽게 재배가 가능하다. 그러나 성장 방향이 빛에 매우 예민한 특 성을 가져 이번 연구에서 빛을 완전히 차단한 암실에서 실 험을 진행하였다. 예상한대로 RPM 상에서 자란 비타민채 는 줄기와 뿌리 방향이 매우 불규칙한 것을 확인할 수 있었 다. 비타민채는 오래 전부터 우주환경과 지상의 모의 무중 력 상태에서 연구되어 왔고 clinostat에서 모양이 다양하게 변한다고 보고되었다[12].
V. 결 론
우주 개발 초기부터 다양한 식물 연구가 진행되어 왔다.
저자는 국내 기술로 RPM을 설계부터 제작까지 성공하여 2D clinostat 상에서 애기장대를, RPM상에서 비타민채를 가 지고 실험하여 모의 무중력 상황하에서 식물의 자동 형태 발생을 확인하였다. 또한 RPM의 vector direction을 이용한 구 형 표현과 계산식을 이용하여 무중력 상태가 조성됨을 확 인하였다. 비록 이러한 연구는 전세계적으로 오래 전에 진 행되었으나 국내에서도 우주 기초 연구를 시작하였다는 점 이 무엇보다 의의가 있겠다.
식물은 우주에서 매우 귀중한 연구 대상이다. 식물은 이산 화탄소를 소비하고 산소를 생성하며 인간에게 영양을 공급 하는 음식물로 사용될 수 있다. 또한 도구를 만들거나 집과 같은 거주 시설을 제작하는 좋은 재료가 될 수 있을 뿐만 아니라 땔감으로 사용이 가능하다. 이외에도 비료, 종이, 그 리고 약제 등으로 활용이 가능하여 우주에서 식물의 연구 는 향후 매우 중요한 대상이 될 것이다.
감사의 글
이 연구는 의무사령부 연구예산으로 진행되었습니다.
REFERENCES
1. Hoson T, Kamisaka S, Masuda Y, Yamashita M. Changes in plant growth processes under microgravity conditions simulated by a three- dimensional clinostat. Bot AMag Tokyo 1992;105:53-70.
2. Gordon SA, Shen-Miller J. Simulated weightlessness studies by com- pensation. Chicago London: University of Chicago Press, 1971:415-426.
3. 임정구. 무중력 모의 실험장치 소개. 항공우주의학회지
2013;23:1-4.
4. Hoson T, Kamisaka S, Masuda Y, Yamashita M, Buchen B.
Evaluation of the three-dimensional clinostat as a simulator of weightlessness.
Planta 1997;203:S187-S197.
5. Unsworth BR, Lelkes PI. Growing tissues in microgravity. Nat Med
4:901-907.
6. Ulbrich C, Westphal K, Pietsch J, Winkler HDF, Leder A, Bauer J, et al. Characterization of human chondrocytes exposed to simulated microgravity. Cell Physiol Biochem 2010;25:551-560.
7. Hoson T, Kamisaka S, Buchen B, Sievers A, Yamashita M, Madua Y. Possible use of a 3-D clinostat to analyze plant growth processes under microgravity conditions. Adv Space Res 19996;17:47-53.
8. Darwin F. Lectures on the physiology of movement in plants. New Phytol 1907;6:69-76.
9. Ishii Y, Hosn T, Kamisaka S, Miyamoto K, Ueda J, Mantani S, et al. Plant growth processes in Arabidopsis under microgravity condi- tions simulated by a clinostat. Bilogical Scences in Space 1996;1:3-7.
10. Brown AH, Dahl AO, Chapman DK. Morphology of Arabidopsis grown under chronic centrifugation and on the clinostat. Plant Physiol 1976;57:358-364.
11. Kordyum EL. Plant cell gravisensitivity and adaptation to microgravity.
Plant biology 2014;16:79-90.
12. Hoson T. Plant growth and Morphogenesis under different gravity conditions: relevance to plant life in space. Life 2014;4:205-216.